基于PSO算法的磁偶极子阵列舰艇磁场模拟研究
2022-10-18侯希晨孙玉东吴江海
侯希晨,孙玉东,吴江海
(中国船舶科学研究中心 船舶振动噪声重点实验室,江苏 无锡214082)
0 引 言
现代舰艇的船体以及武器装备等一般由铁磁性物质制造而成,铁磁性物质在磁场环境中将被磁化,在地磁场的磁化作用下,舰艇周边会产生固定磁场与感应磁场。固定磁场是在舰艇建造过程中铁磁性材料受到地磁场长期作用产生的长期磁特征,舰艇停泊时具备良好的测量与消磁条件可在航行前削弱固定磁场;感应磁场是在地磁场短期作用下产生的磁场增量,受舰艇航向与行驶海域等因素影响动态变化,仅能通过舰载消磁设备降低感应磁场。舰艇磁场是舰艇重要的暴露源,掌握舰艇磁场分布情况十分重要。
目前主要的舰艇磁场模拟方法有解析法、数值法等,其中数值法有边界元法、积分方程法与有限元法等。由于舰艇型线与铁磁物质分布情况复杂,采用解析方法难以计算舰艇感应磁场。目前更为成熟的方法是利用敷设在船体下方某平面磁探头阵列测量舰艇周边的部分磁场,使用磁体模拟法反演出相应的磁体模型,进而通过深度换算得出舰艇周围感应磁场分布情况。常用的磁体模拟法模型有:磁偶极子模型、旋转椭球体模型、磁偶极子阵列模型、旋转椭球体阵列模型、旋转椭球体与磁偶极子阵列混合模型等。其中,磁偶极子阵列模型可通过设置磁偶极子的位置与磁矩实现对舰艇铁磁性物质分布特征的精确模拟,实现简单且拟合效果理想,文献[7 - 8]中分别将磁偶极子均匀分布在舰艇的吃水面与舰艇所处的椭球空间中上,但是依赖经验固定磁偶极子位置与数量,容易增大拟合误差使得建模失败。
目前,舰艇磁场在2.5倍船长距离外的全空间的一致性已经过证明,舰艇的整体磁特征覆盖了局部磁特征,舰艇远场磁场可用单个磁偶极子进行模拟;近场磁场的模拟则采用磁偶极子阵列模型与旋转椭球体模型等,能在一定精度内反映铁磁性物质分布特征的模型。出于拟合精度与外推应用范围需求以及浅水域水深、噪声条件等因素的限制,磁探头阵列距离船体较近。在这种测量环境下,舰艇的垂向非对称结构将引起在上、下方向等距平面上的磁场幅差异,进而影响数值模型的换算结果。在应对舰艇上方的航空磁探测时,需要量化非对称结构对舰艇磁场分布的影响。随着智能优化算法(退火算法、粒子群算法等)的进步,智能优化算法广泛应用于磁体模拟法模型参数的优化中,逐步取代了以往依赖经验确定模拟体参数的方法。通过在一定限制条件下参照某一目标函数确定模拟体的位置与磁矩,得到理想的磁模型。其中,粒子群算法易于实现、全局与局部求解能力均衡且便于求解多维问题,在舰艇磁场建模中展现出优越的性能。
为探究非对称结构舰艇上、下方感应磁场差异与衰减规律,本文使用某非对称潜艇简化模型在COMSOL Multiphysics环境下进行仿真实验,对模型上、下方磁场幅值进行定量分析。进一步研究使用三维偶极子阵列模型对非对称舰艇进行磁性建模,以均方根误差为目标函数,依据艇模上、下方两平面感应磁场数据,使用动态权重参数的PSO优化算法计算获得舰艇磁偶极子阵列模型,外推舰艇上、下方平面的磁场分布,并与艇模仿真结果进行分析比较。实验结果表明,艇模上、下方感应磁场分布规律一致,但在单倍船长内幅值差距较为显著,若采用某单一近场平面进行磁场建模,在近场与远场的磁场换算中均会带来较大误差。使用动态权重参数的PSO优化算法获得的三维磁偶极子阵列拟合与换算效果良好,能准确反映非对称舰艇结构的感应磁场分布规律。
1 粒子群算法
粒子群优化算法(particle swarm optimization,PSO)源于鸟群的捕食行为研究。粒子群优化算法的原理是通过群体中个体之间的协作与信息共享来寻找最优解。粒子群算法通过设计一种粒子来模拟鸟群中的鸟,粒子仅具有速度和位置2个属性,速度代表行进的快慢与方向,位置代表粒子当前所搜寻到的解。单个粒子在求解空间中单独搜寻最优解,并将其记为当前个体的最优解。将个体最优解与整个粒子群里的其他粒子共享,根据当前所有粒子的个体最优解找到整个粒子群中的最优最优解作为当前全局最优解。粒子群中的所有粒子根据各自的当前个体最优解和整个粒子群的当前全局最优解来调整自身的速度和位置,并添加一些随机因素拓宽搜索范围,不断更新个体极值与全局最优解,最终粒子群收敛于最佳位置。PSO算法的迭代公式如下:

式中:为惯性权重,和为学习因子,和为0~1之间的随机数,和为个体最优解与全局最优解。
式(1)右侧可分为3部分,第一部分代表粒子保持行进惯性,每个粒子在每一次的迭代中都将继承上一次迭代中的一部分速度。第二部分代表粒子自身历史最佳位置的影响,粒子根据在历次迭代中获得的最优解调整粒子在当前迭代中的行进方向。第三部分代表粒子之间协同合作,根据整个粒子群在历次迭代中的所得到全局最优解调整粒子在当前迭代中的行进方向。3部分分量使得各个粒子有目的性地向可能存在相对最优解的区域行进,随着迭代次数的增加,各个粒子会收敛至最优解附近。
通过改变惯性权重与学习因子的大小来决定粒子惯性、个体最优解与全局最优解对粒子行进方向的影响程 度。一 般,,取 固定 值。和两 项 随 机 数是为了在迭代中提供一定程度的扰动从而使得各个粒子在全局范围内向最优解前进的同时保持一定的随机性,提升搜索可能存在的更优解的机率。
图1 粒子群算法示意图Fig. 1 Particle swarm optimization schematic
粒子群算法操作简单,收敛速度快,具备多个粒子间的合作功能,作为非确定算法能有更多机会求解全局最优解。粒子群算法在磁防护领域已经有了较为成熟的应用,如用于确定磁体模拟法中模拟体的分布与磁矩以及舰载消磁系统固定绕组的分布与安匝数等。
2 艇模上、下方感应磁场定量分析
常见舰艇在两舷侧都具备良好的对称性,在船长方向和垂直方向则常为非对称形式,通常采用敷设在水底的磁探头阵列测量沿舷侧与船长方向的磁场分布特性,并通过该测量结果建立分布在某椭圆平面上的磁偶极子阵列,经深度换算获得其他目标平面的磁场分布。而这种建模方法仅在二维平面上进行,获得的磁场关于建模平面对称,反映的是舰艇的远场磁特性,在近场磁场的模拟中无法反映垂向铁磁性材料的分布特点。
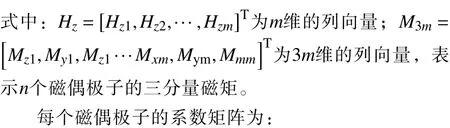
在COMSOL Multiphysics环境中对某一潜艇简化模型上、下方感应磁场的衰减与分布规律进行定量分析。潜艇简化模型船长26 m,船体部分高为4 m,围壳高出船体顶部1 m。船首部分为一个半径为2 m的半球壳,船体中部为一个长为20 m的空心圆柱,尾部使用一个高为4 m,底面半径为2 m,顶面半径为1 m的圆台壳体模拟,上述壳体的厚度均为0.2 m。围壳为由半长轴为2 m,半短轴为1 m的椭圆拉伸而成的实心柱体,用以模拟潜艇垂向的非对称因素。模型材料采用内置材料库中的钢铁材料,相对磁导率为4 000。地磁场设置为 5×10A/m,方向垂直向下。以潜艇简化模型的感应磁场垂直分量为例,潜艇简化模型与仿真测试结果如图2所示。

图2 简化潜艇模型Fig. 2 Simplified submarine model
图3 艇模上、下方单倍船长处平面磁感应强度Fig. 3 Magnetic induction intensity of plane at single length of the ship above and below the model
图4 模型上、下方1.5倍船长处平面磁感应强度Fig. 4 Magnetic induction intensity of plane at 1.5 times the length of the ship above and below the model
可知,场点距离大于在1.5倍船长时,潜艇上、下方的感应磁场已经十分接近,2.5倍船长距离外的磁场全空间一致性理论在仅考虑感应磁场时完全适用。在单倍船长处,磁感应强度最大相对误差为6.26%,最大绝对误差为 5.5×10T;而在0.5倍船长处,磁感应强度最大相对误差达到21.3%,最大绝对误差为3.6×10T。若在磁场建模过程中,仅采用艇下方某近场平面数据作为输入参数,近场平面与艇距离越小,则由于艇垂向非对称结构带来的误差将越大,将大大降低艇磁场数值模型的精确度,也限制了深度换算方法的应用范围。
图5 模型上、下方2倍船长处平面磁感应强度Fig. 5 Magnetic induction intensity of plane at double length of the ship above and below the model
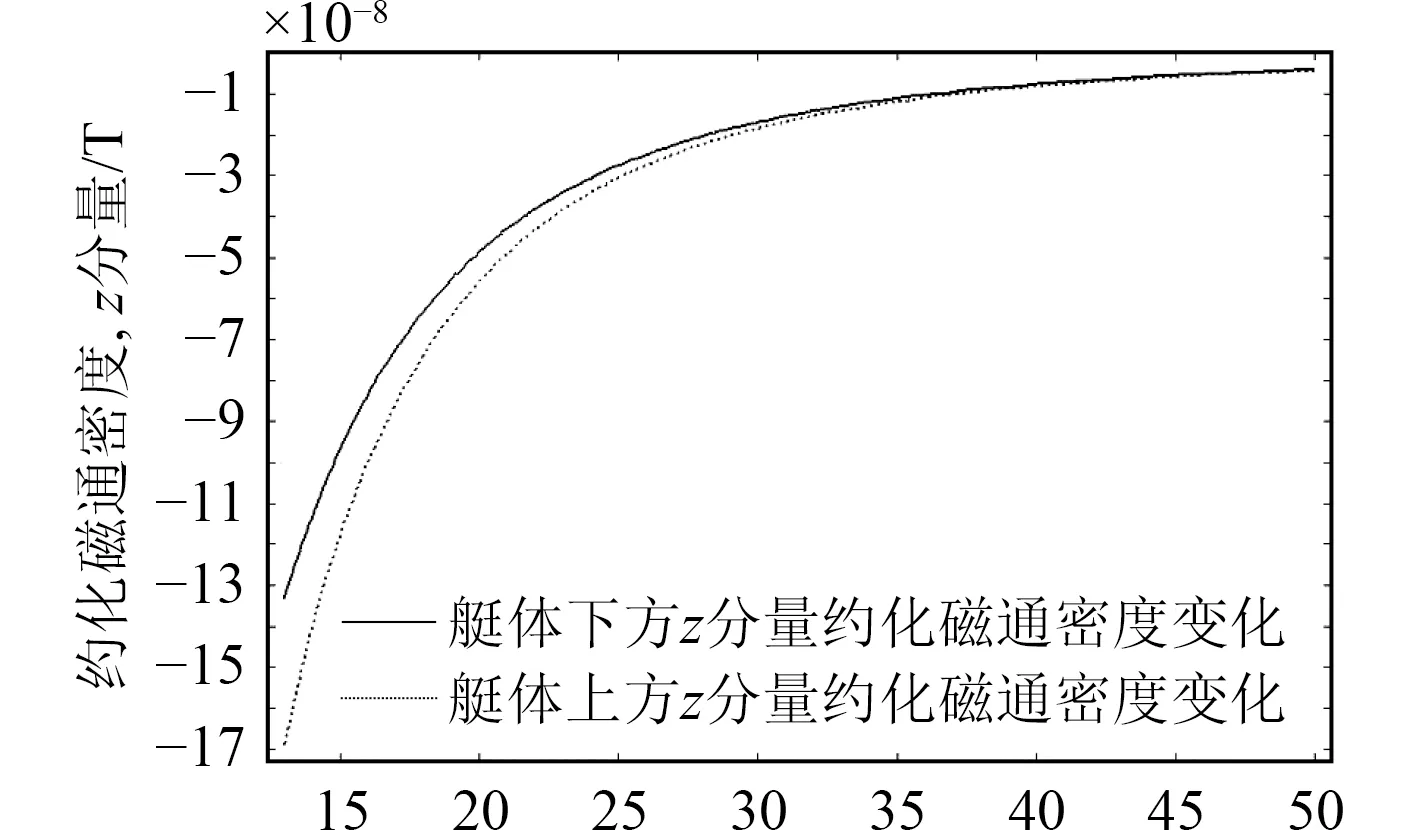
图6 模型上、下方 z 分量磁感应强度Fig. 6 z component of magnetic induction intensity above and below the model
3 磁偶极子阵列模型优化
潜艇的近场感应磁场可以用一系列磁偶极子进行模拟,随着场点与船体距离的增加,潜艇感应磁场的局部特征逐渐被整体特征所覆盖,使用的磁偶极子数量逐步减小,当场点与船体距离大于2.5倍船长时,艇感应磁场可以用一个磁偶极子来等效。位于原点的磁偶极子在某场点产生的三分量磁场为:
假设使用个磁偶极子来拟合艇感应磁场,各磁偶极子的位置为 (x,y,z),艇在场点产生的感应磁场的垂向分量为H:


式中:,,为场点与磁偶极子的坐标差,为场点与磁偶极子的距离。
则个磁偶极子的系数矩阵为:

为进行对磁偶极子阵列参数的优化,需要选择目标函数作为优化的参考。选用感应磁场垂向分量的均方根误差作为目标函数,表达式如下:

式中:为磁场测量数据,为磁偶极子阵列系数矩阵,为磁矩向量。
均方根误差作为目标函数直接对迭代过程中的拟合误差进行优化,使获得的磁偶极子阵列在每个测量点拟合误差达到最小值,优先保证模型的拟合精度,在系数矩阵的维度低、测量误差小且信噪比较高的情况下,能获得较为理想的模型。
实验中为了模拟舰艇铁磁材料空间分布的非对称性,以艇模的船长与船宽为椭圆的长轴与短轴,以此椭圆绕长轴旋转得到旋转椭球体,磁偶极子阵列分布于该旋转椭球体中。
具体实验采用艇上、下方0.5倍船长处两平面感应磁场测量数据作为输入参数换算单倍船长处两平面的磁场分布情况。以均方根误差为目标函数,对8个磁偶极子的位置与磁矩进行优化计算获得磁偶极子阵列模型,在COMSOL Multiphysics的磁场接口中建立磁偶极子阵列几何模型,通过磁场数值仿真实现对目标平面的深度换算。PSO算法中初始参数为:最大迭代次数为200,粒子群数量为50,学习因子和为2,惯性权重则采取随迭代次数变化的动态权重:

式中:为权重系数,为 当前迭代次数, T为最大迭代次数。
使用动态权重系数时,随着迭代次数增加,局部搜索能力逐渐增强。在接近迭代末期的时候能保留一定的全局搜索能力,避免算法收敛于局部最优解。提升了算法的寻优能力。
均方根误差随迭代次数变化、磁偶极子分布情况、潜艇模型各平面测量数据、磁偶极子阵列模型换算情况如图7所示。

图7 均方根误差的变化Fig. 7 The change in average square root error
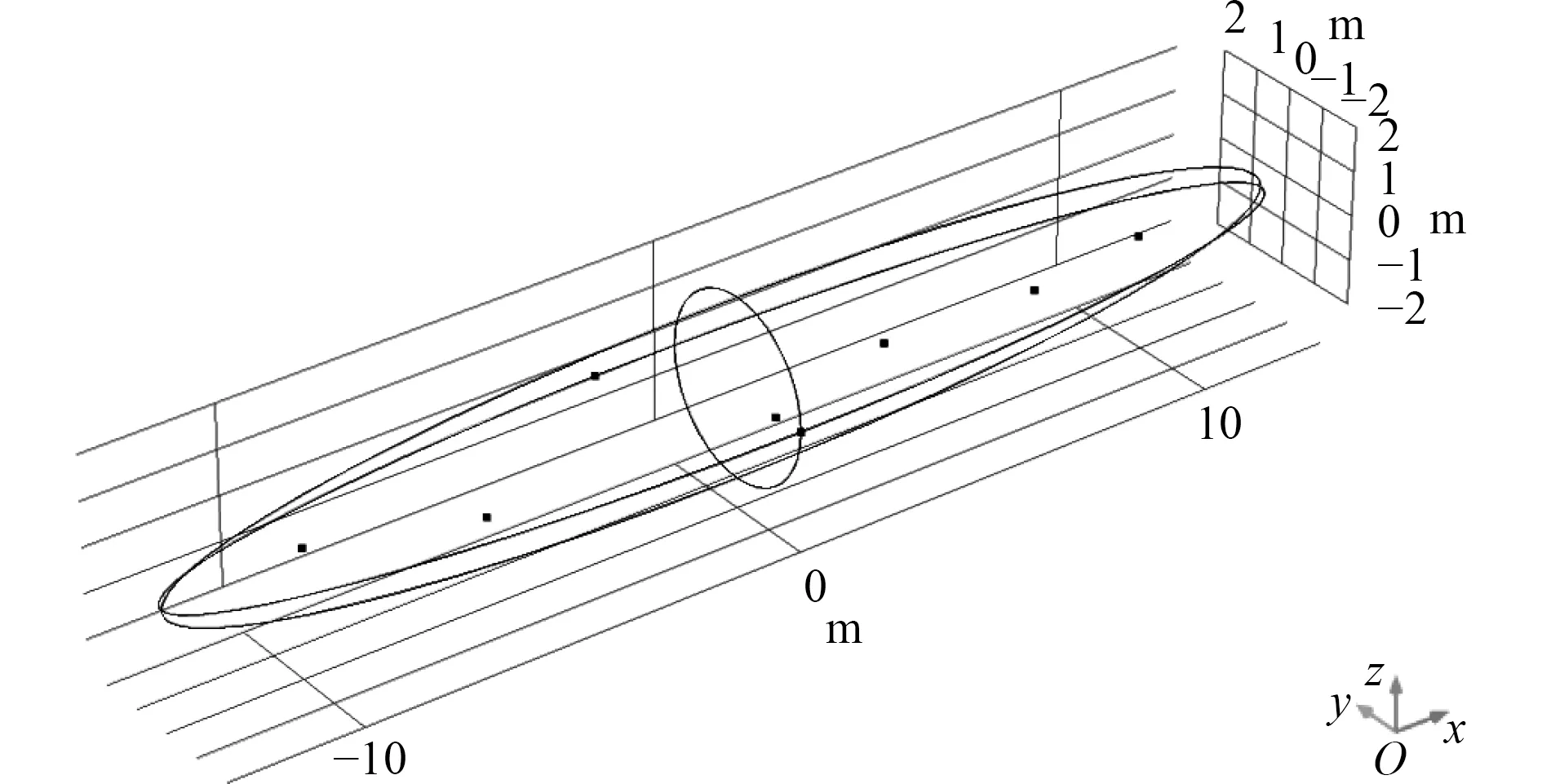
图8 磁偶极子分布情况Fig. 8 Distribution of magnetic dipoles
由图7可知,在200次迭代后,拟合均方根误差收敛至 2.5×10,模型拟合精度较高。重复求解得到的磁偶极子分布位置与磁矩不同,而均方根误差能保持稳定水平。磁偶极子阵列中旋转椭球体中部位置的磁偶极子的磁矩相对较大,与潜艇模型中部位置铁磁性物质集中的围壳对应,符合实际情况。
由图9~图12可知,由磁偶极子阵列模型根据0.5倍船长处平面数据换算得到的单倍船长平面上的感应磁场垂向分量分布规律与艇模测量数据一致,龙骨与左右舷侧的测量线均呈一个半波,在相应图像半波的波谷处可以明显观察到感应磁场幅值差异,有效地表征了艇模中铁磁性材料的分布特点。由表1可知,3条测量线上的感应磁场换算误差均能控制在5%以内,模型换算精度较高。随着场点与艇模距离的增加,上、下方感应磁场的幅值差的数量级将逐步递减,直至可用单个磁偶极子进行模拟。
图9 艇下方感应磁场测量情况Fig. 9 Measurements of the induced magnetic field below the submarine
图10 艇上方感应磁场测量情况Fig. 10 Measurements of the induced magnetic field above the submarine

图11 磁偶极子阵列下方感应磁场换算情况Fig. 11 Conversion of the induced magnetic field below the magnetic dipole array
图12 磁偶极子阵列上方感应磁场换算情况Fig. 12 Conversion of the induced magnetic field above the magnetic dipole array
最后对拟合精度与磁偶极子数目的关系进行探究。随着磁偶极子数目的增加,均方根误差呈指数式下降。本次仿真实验数据采用艇模上、下0.5倍船长处平面的共78个测量点数据。由于求解的磁偶极子三分量磁矩是3倍磁偶极子数目的列向量,在磁偶极子数目小于26时,矩阵的求解为一超定方程问题,精度随着磁偶极子数目提升。当磁偶极子数目为26时,矩阵的求解为一定解方程问题,理论上不存在误差,即为精确解。磁偶极子数目超过26时则为欠定方程问题,方程有无穷多组解。在定解与超定方程问题范围内,测量点与磁偶极子数量越多则拟合精度越高。

表1 艇上、下方单倍船长平面感应磁场 z 分量换算误差Tab. 1 Conversion error of the induced magnetic field’sz component of plane at single length of the ship above and below the submarine

图13 拟合精度与磁偶极子数目的关系Fig. 13 The relationship between the fitting accuracy and the number of magnetic dipoles
但由于系数矩阵复杂度的提高,对测量数据质量敏感度上升,易出现过拟合问题使建模失败。故需要通过正则化方法或逐步回归方法对磁矩向量进行优化,提升模型的鲁棒性与稳定性。
4 结 语
本文对铁磁材料非对称分布舰艇上、下方感应磁场分布规律进行定量分析,完善舰艇磁场全空间一致性理论。探究采用单个测量平面数据进行磁场建模方法存在的缺陷,并提出了依据艇上、下方等距近场平面磁场测量数据的三维磁偶极子阵列磁场模型,模型基于粒子群算法,以拟合均方根误差为目标函数对含有磁偶极子位置参数的系数矩阵进行优化得到最优磁偶极子阵列。通过比对磁偶极子阵列模型深度换算平面上的换算结果与简化模型仿真数据,验证了该磁偶极子阵列模型的有效性与精确性。本文研究成果可应用于舰艇磁场的高精度建模,并为舰艇磁防护中磁场测量、磁性目标探测与定位等工作提供参考。
