主动式截流器流体动力性能与减摇效果研究
2022-10-18王习建张隆辉李永成
王习建,曾 柯,张隆辉,余 兰,李永成
(中国船舶科学研究中心 水动力学重点实验室,江苏 无锡 214082)
0 引 言
由于受到风浪等复杂海洋环境的影响,船舶在航行过程中会产生显著的摇荡情况,从而影响船载设备的正常工作,降低船上人员的工作效率,对船舶的航行性能产生不利影响,甚至会造成船舶甲板上浪、螺旋桨出水和倾覆等现象的发生。技术人员发现,通过在船体上布置合适的减摇附体可有效地提高船舶耐波性。
截流器是近些年船舶领域出现的一种减摇附体,对其与船体进行合理的匹配设计,可改变船体周围及尾后方的流场,明显提高船舶的综合航行性能。针对截流器的水动力性能,国内外研究人员开展了相关研究,早在1996年,针对匹配截流器的半排水型船舶,采用模型试验方法,Zaninovic等通过研究匹配截流器的高航速船舶阻力性能和纵倾角的变化,分析截流器的减阻机理,并针对其在高速船航态的影响方面进行评估。为了深入探索截流器高度变化对压力分布的影响,Molini和Brizzolara通过数值计算方法,研究分析截流器展弦比变化对其周围速度和压力绕流场分布带来的影响。Van Oossanen等采用CFD数值计算方法针对匹配50 mm高度的截流器机动艇开展了详细的优化计算,分析了由于截流器的存在对滑行艇阻力性能的影响。Steen通过总结分析有关截流器的模型试验,发现加装截流器前后船舶所产生的升力受航速及纵倾角的影响较小。Mehan Mansoori等探索了滑行艇匹配截流器以及截流器-尾板前后的船舶稳性及其水动力性能的变化,研究结果表明,当截流器高度过大时,船舶会产生明显的埋首现象,从而对船舶的稳性产生消极作用。截流器在国内的研究起步较晚,2006年,董文才等采用模型试验的方法分析了匹配截流器穿浪双体船的阻力特性。2012年,王文江等[针对匹配截流器的半滑行艇开展了阻力试验研究。2018年,郭春雨等针对匹配截流器的深V型船阻力性能开展研究,试验结果表明截流器具有良好的减阻效果。2020年,申云磊等对不同截流器深度下的滑行艇进行模型试验,分析了截流器可通过改变船底压力分布从而降低船体阻力的效果。2021年中船702研究所开展了截流器的水动力机理研究,通过多艘船模试验验证了截流器在船舶纵向运动姿态控制方面的积极作用。
目前国内外主要针对截流器的减阻性能开展相关研究,而对其减摇效果的研究较少。本文以匹配截流器的三体船为研究对象,开展截流器流体动力性能与减摇效果研究,通过数值计算探索了截流器的水动力性能。结合模型试验,利用截流器的阻升效应并借助合理的控制策略,实现对三体船纵摇的主动控制,提高三体船的纵向运动性能。
1 数值计算方法
1.1 控制方程
粘性不可压缩流场中时间平均连续性方程和雷诺平均 Navier-Stokes 方程(RANS)在笛卡尔坐标系下的张量形式为:

1.2 湍流模型
采用Realizable两方程湍流模型,该模型的湍流动能()方程为:

湍流耗散率方程为:

2 截流器流体动力性能研究
2.1 三体船及截流器构型
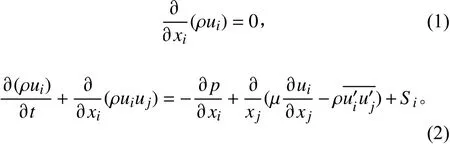
本文的CFD数值计算研究对象为三体船,其横剖面型线如图1所示,主尺度参数见表1。该三体船由1个主体和2个片体组成,片体位于船体中后方。
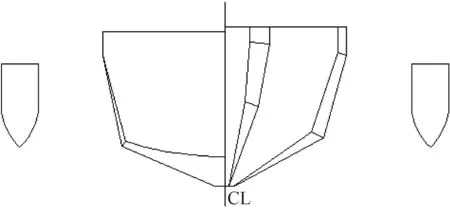
图1 三体船几何图Fig. 1 Geometry figure of the trimaran

表1 三体船模型主要参数Tab. 1 Main parameters of trimaran model
为了增大迎流面积、发挥截流器最大的水动力作用效果,在三体船尾部沿船宽方向连续布置截流器,并垂直船体向下,如图2所示。根据船模主尺度参数,设计截流器垂向高度分别为20 mm,40 mm,60 mm,80 mm和100 mm(约为模型垂线间长的0.5%,1.0%,1.5%,2%,2.5%),探索截流器对船体水动力性能的影响规律。
2.2 截流器流体动力性能计算与分析
针对匹配不同截流器高度(0,20 mm,40 mm,60 mm,80 mm,100 mm)的三体船静水阻力开展拘束模数值计算研究。
表2为不同截流器长度下三体船的静水阻力计算结果其中R为总阻力,R为压差阻力,R为摩擦阻力。可以看出,随着截流器长度的增加,总阻力值在增加。从摩擦阻力和压差阻力的计算结果可知,摩擦阻力的变化量较小,截流器的存在主要改变了压差阻力的计算结果,从而增加了总阻力。

图2 截流器在三体船尾部的布置Fig. 2 Interceptor arrangement at the stern of trimaran

表2 不同航速下三体船静水阻力计算结果表Tab. 2 Calculation results table of static water resistance of trimaran at different speeds
图3为不同截流器长度下三体船静水中拖曳航行尾部兴波CFD计算结果。可以看出,随着截流器长度增大,三体船尾部的虚长度显著增大,船尾兴波也逐渐增大。结合阻力数值计算结果可以发现,尽管截流器的存在增加了尾部的虚长度,但是尾部兴波相比光体却增加了很多,造成压阻不但没有减小反而增加。

图3 三体船静水中航行尾部中纵剖面波形图Fig. 3 Mid-longitudinal section waveform of trimaran stern sailing in still water
为了探索截流器的水动力作用机理,将三体船底部切割成若干剖面,如图4所示。在数值计算中,监测不同截流器长度下船尾至船中的压力分布。
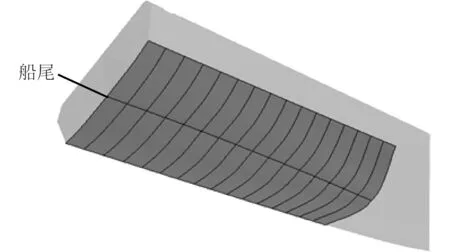
图4 三体船底部剖面划分图Fig. 4 Section division of trimaran bottom
图5为不同截流器长度下船尾至船中的压力分布曲线。图中,J表示截流器,J20表示截流器高度为20 mm。可以看出,当三体船尾部无截流器时,船尾附近的压力值较小,船尾至船中的压力逐渐增大。当三体船尾部匹配截流器时,船尾的压力值最大。同一截流器长度下,船尾至船中的压力值呈现先减小后增加的趋势,且截流器越长,靠近船尾的压力越大,这表明截流器对船体的水动力作用主要集中在船尾附近。

图5 不同截流器长度下船尾压力分布Fig. 5 Pressure distribution under different interceptor length
3 主动式截流器减摇效果试验研究
由于截流器的存在使得船尾流体压力急剧增加,在船尾产生一个向上的流体作用力,从而可以产生一个较大的抑制船舶抬首的纵摇力矩,利用这一水动力特性,设计主动式截流器,在波浪中开展匹配主动式截流器的三体船纵向运动响应试验研究,验证主动式截流器的减摇效果。
3.1 截流器机构设计
根据前文的数值计算并参考文献[12],选取主动式截流器的可伸缩长度为40 mm(约为模型垂线间长的1%),形状和三体船的尾部相似,并紧贴着尾封板由船底向下伸出,截流器系统的组成主要包括:截流器、步进电机、滑台、导杆、安装板等,其具体结构如图6所示。截流器板面上布置有螺纹孔,可与导杆进行连接,如图7所示。
图6 截流器机构方案安装示意图Fig. 6 The installation diagram of interceptor mechanism scheme

图7 截流器示意图Fig. 7 Schematic diagram of the interceptor
3.2 主动式截流器控制原理
主动式截流器控制方法的关键问题是建立目标船的运动数值模型。考虑到主动式截流器的功能是主要减小船舶的纵摇运动,对其他自由度的运动影响较小,因此在控制仿真时仅需建立目标船的纵摇运动模型。由此,时域中目标船的纵摇运动模型方程可以写作:

其中:为船舶纵摇转动惯量;为船舶纵摇附加惯量;为船舶纵摇阻尼系数;为纵摇静水回复力系数;为速度脉冲函数函数;为船舶受到的纵摇波浪力矩;为主动截流器提供的控制力矩。
主动式截流器的工作原理是通过增加主动式截流器的伸长量使航行船舶获得用于抵抗波浪抬首作用的埋首力矩。当船舶受到波浪的埋首作用力时,主动式截流器将伸长量减小,从而避免与波浪力矩的作用叠加,造成船舶的埋首增大。本文所采用的主动截流器纵摇控制原理如图8所示。
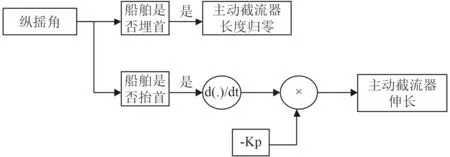
图8 主动式截流器减摇原理图Fig. 8 Stabilization schematic diagram of active interceptor
可知,通过输入目标船的纵摇角度、角速度等信号,经过系统核心控制单元的处理和解算,计算得到截流器的伸长量,使其产生相应的力矩来实现目标船纵向运动姿态控制,从而提高风浪中目标船的航行性能。由于主动式截流器仅能提供埋首力矩,因此当船舶纵摇为抬首时,按比例控制方式计算主动式截流器的伸长量。当船舶纵摇为埋首时,为避免主动式截流器进一步加大埋首纵摇角,则控制截流器长度迅速归零。
3.3 规则波中运动响应模型试验
通过顶浪规则波试验,分析得到三体船在截流器主动控制/不控制状态下的纵摇运动响应函数,本文截流器不控制指的是截流器在尾部船底上方固定不动(无伸缩量)。规则波试验中采用拖航试验方法进行,具体试验工况如表3所示。
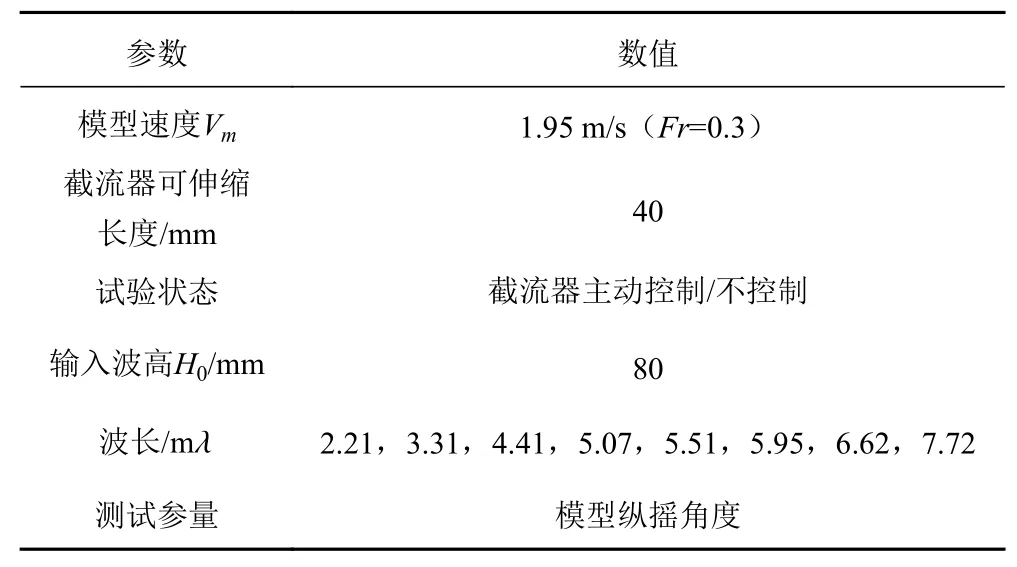
表3 规则波模型试验内容Tab. 3 Regular wave model test
图9为顶浪规则波中截流器主动控制和不控制时,模型纵摇运动的典型时间历程(纵摇值抬首为正)。可以看出,截流器主动控制时,模型抬首状态下的纵摇值明显减小,而埋首状态下的纵摇值变化不大。这表明,截流器主要通过抑制船舶抬首来达到减小纵摇运动的效果。
通过规则波试验得到模型在截流器主动控制和不控制时纵摇运动的传递函数,如图10所示。其中,横坐标为波长船长比,纵坐标为纵摇无因次的响应值。
可以看出,当波长船长比小于1.0时,模型的纵摇运动响应较小,没有明显的减摇效果;当波长船长比大于1.0时,主动式截流器起到了减摇效果;波长船长比为1.35时,截流器的最大减摇效果可达19.23%。

图9 船模纵摇运动时间历程Fig. 9 Time history of pitching motion of ship model
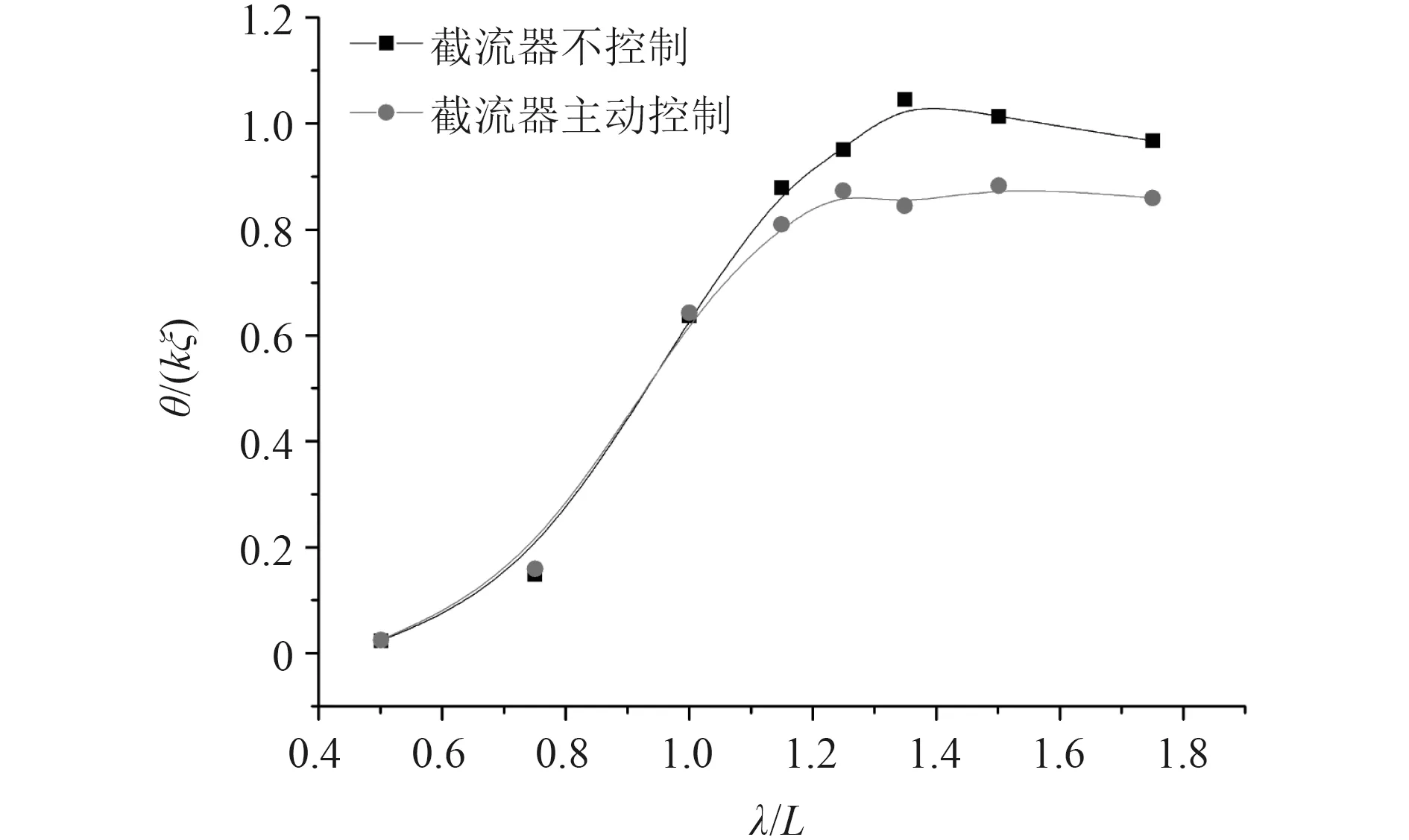
图10 顶浪规则波中纵摇运动响应曲线Fig. 10 Curve of pitching motion response in top regular wave
4 结 语
以一艘三体船为研究对象,开展主动式截流器流体动力性能与减摇效果研究,结论如下:
1)由静水阻力数值计算结果可知,随着截流器长度的增加,总阻力值逐渐增加,加装截流器的三体船摩擦阻力变化较小,截流器的存在主要改变了压差阻力值,从而增加了船体总阻力;
2)由不同截流器长度下三体船底部截线上的压力值可知,当流经船体尾部下表面附近的水流受到截流器的阻流作用时,截流器前流体的压力将急剧增加,从而在船尾底部产生一个向上的流体作用升力;
3)当波长船长比大于1.0时,主动式截流器起到了减摇的效果,最大减摇效果可达19.23%。
本文提出的高速三体船纵向运动性能的截流器及其控制方案,可改善三体船综合航行性能,为后续截流器在实船上的应用提供技术支撑。
