关节外科机器人辅助技术在临床教学中的研究与应用
2022-10-18冀全博李俊成王岩张国强
冀全博 李俊成 王岩 张国强
髋关节解剖结构复杂且功能特殊,又有重要的血管、神经毗邻。全髋关节置换术 ( total hip arthroplasty,THA ) 是治疗终末期髋关节疾病的重要手段,能有效恢复关节功能。髋关节假体安放位置不良常导致术后关节脱位、活动受限和假体磨损等严重并发症,影响患者术后康复。关节外科规范化培训要求学生对 THA 具有整体的知识掌握和三维立体概念。然而,通过传统教学模式来进行 THA 的手术方案教学,特别是在髋臼磨锉位置和深度以及假体准确植入的指导培训方面具有一定的局限性。近年来,机器人辅助技术被在关节外科临床应用上得到了大力发展。机器人辅助技术可以更加精准实时控制和调整髋臼磨锉的方向和假体的定位,提高了手术的精准性,同时能够使初学者清晰直观的领会髋臼的深度和位置以及假体置入的准确性,降低了徒手安放假体的不确定性,提高了学习效率,缩短了学习周期,真正使教学模式向以学生为中心转变。为适应关节外科临床教学模式的发展和改革,笔者将机器人辅助技术应用于关节外科教学中,通过对关节外科机器人辅助技术在临床教学中的研究与应用,总结机器人辅助技术的教学效果,以有效提高教学效率和教学质量。
资料与方法
一、一般资料
选取 2018 年 12 月至 2020 年 12 月参加我院关节外科规范化培训轮转学习的 32 名医学生作为研究对象,年龄 24~28 岁,其中对照组平均年龄( 25.8±1.3 ) 岁,试验组平均年龄 ( 25.7±1.5 ) 岁。所有人员采用完全随机化分组方法,即利用计算机产生随机数将研究对象随机平均分为对照组和试验组进行研究,两组医学生各 16 名。两组年龄、性别比及基础成绩方面等基线资料差异无统计学意义(> 0.05 ) ( 表1 )。
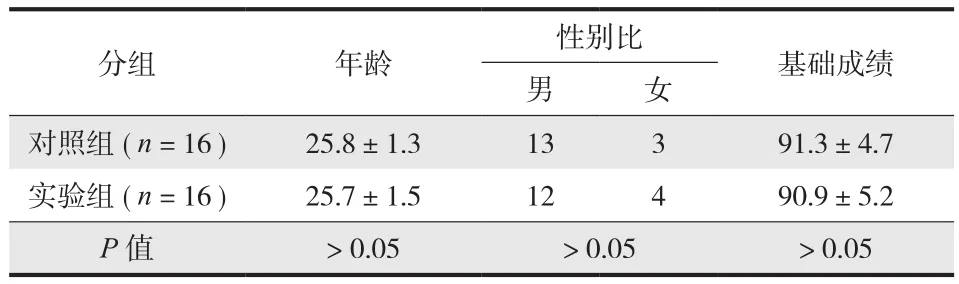
表1 两组基线资料的数据比较 ( x-±s )Tab.1 Comparison of baseline data between the two groups ( x- ± s )
二、教学方法
1.对照组:采用常规线下传统带教的方式,由教师制作 PPT 教案线下讲课的形式,选择常见股骨头坏死作为典型教学病例介绍骨科专业基础知识要点,包括患者髋臼原始解剖形态以及 THA 要点和经验。带教前将上课学习内容交给学生提前预习。理论授课详细讲授知识点 2 课时,手术室现场教学2 课时。
2.试验组:( 1 ) 机器人辅助技术图像处理教学及术前计划模拟教学。试验组首先通过术前对患者的骨盆、股骨近端和膝关节进行 CT 扫描,同时使用 Stryker公司的 THA 3.1 软件重建骨盆和股骨近端的三维模型 ( 图1 )。带教老师向试验组介绍关节置换的手术原理并帮助其理解患者髋臼原始解剖形态 ( 图2 ),同时带领试验组同学对髋臼假体的型号、前倾角和外展角进行规划;然后与试验组一起在髋臼冠状面和横断面上检查计算机模拟结果,帮助试验组理解髋关节假体的安放位置等;另一方面,带教老师通过根据术前计划选择最合适的股骨柄及股骨头型号来恢复下肢长度 ( 图3 ),带领试验组在软件上测量股骨颈截骨线到小转子的距离,以便于在手术期间确定截骨高度,帮助试验组同学理解股骨截骨的手术操作原理和注意事项;( 2 ) 教学讨论:关节病例展示及讨论分析 2 课时,机器人辅助技术教学 2 课时。通过授课讨论,并在讨论完毕后采用机器人辅助技术图像处理技术,展示基于 CT 扫描数据制作的髋关节三维图像,清晰直观地向实验组同学阐述股骨头坏死的解剖、髋关节的解剖结构、关节置换的手术操作步骤等,特别是对术中髋臼需要磨锉的位置、深度和角度以及股骨截骨的部位和下肢力线的恢复等进行教学,深入讲解 THA 的要点和方案。

图1 a:机器人辅助技术进行骨盆及下肢三维重建图像展示;b:患者术前下肢长短测量的二维图像Fig.1 a: Robot-assisted technology in 3D reconstruction of the pelvis and lower limbs;b: Preoperative measurement of lower limb length by two dimensional images

图2 a~d:机器人辅助技术从多角度和多方向观察髋臼形态,立体直观展现髋臼的骨储备、囊性变形和骨赘增生Fig.2 a - d: Robot-assisted technology to observe the shape of acetabulum from multiple angles and directions; Bone reserve, cystic deformation and osteophyte proliferation of the acetabulum were showed

图3 a:机器人辅助展示髋臼位置的覆盖情况和髋臼杯安放角度;b:机器人辅助技术实时提示髋关节置换术后假体的安放情况和下肢长短比较Fig.3 a.Robot-assisted technology to display the acetabular position coverage and acetabular cup placement angle; b.Robot-assisted technology could prompt the placement of prosthesis and the comparison of leg length after hip replacement in real time
三、教学效果评价
1.教学考核:两组均由带教资历深厚,规范化培训教学经验丰富的带教老师完成教学指导。教学结束后所有学生参加统一命题的理论和操作考试。考虑到试验组机器人辅助技术多涉及操作,为客观评价机器人辅助技术的教学效果,笔者将基础理论教学内容和操作技能的考核侧重于共性部分。其中试验组和对照组的理论考核内容均包括股骨头坏死等常见髋关节疾病的解剖、关节置换的原理以及髋臼磨锉角度大小范围等基础理论教学内容。理论考试内容由未参加教学的另一位教师阅卷。试验组和对照组的统一操作考试内容包括 THA 的操作要点回答、髋臼假体的安放位置操作、股骨截骨的具体位置识别和注意事项等内容,并统计两组的理论和操作考试分值。
2.调查问卷:教学结束后,所有学生以匿名方式填写关于教学方式评估的调查问卷。问卷内容包括 3 个指标,即能否激发主动学习兴趣、提高理论知识及教学模式满意度 3 个方面。每项指标设标准是和否两个选项,并统计每个选项的比率。
四、统计学处理

结 果
一、理论和操作教学结果
将收集到的两组教学数据进行统计学分析。结果显示,在理论知识和操作考试成绩方面,试验组学生的成绩优于对照组,且差异有统计学意义 (<0.05 ) ( 表2 )。
二、教学效果调查问卷分析
对所有学生进行调查问卷,共计发放问卷32 份,回收 32 份,均为有效问卷,回收率 100%。两组问卷进行数据统计分析。结果显示,机器人辅助技术实验组在激发学习兴趣、提高理论知识及教学模式满意度 3 个方面的教学效果评分优于传统教学的对照组,差异均有统计学意义 (< 0.05 ) ( 表3 )。
讨 论
在临床上,关节外科中髋关节解剖结构复杂,涉及众多神经与血管,内容知识复杂,对于学生的理解和记忆难度较大。熟练掌握髋关节解剖结构对于该领域疾病的临床诊断及手术治疗具有至关重要的作用。传统骨科教学通常由任课教师作为主导,以文字教学和二维解剖图谱为主要素材,直观性不足,常导致学生的学习积极性较低、理论技能知识掌握不够和教学满意度不高等问题。机器人辅助技术可以将 CT 数据导入计算机工作站进行三维重建,并利用图像处理软件进行三维解剖模型构建,有助于加强医学生对于解剖结构位置的空间理解,术中操作注册步骤的实时控制更能深化学生对 THA的整体掌握,提升了关节外科的教学效果,也推动了临床教学的改革创新。
THA 能有效改善患者生活质量,减轻患者痛苦。但传统教学模式学习曲线长,从而导致学习理解难度大、知识掌握不全面等教学问题。机器人辅助技术有利于缩短基础理论知识与临床技能操作之间的距离。传统关节外科临床教学模式中,教师针对基本手术技术,只能借助枯燥的文字资料和二维图片进行讲解,并在手术室长期教学讲解,才能让学生深入了解手术过程,并在上级医生指导下进行部分辅助手术操作,学生对知识的理解和关节外科手术的熟悉有很大的局限性。机器人辅助技术的出现为关节外科临床教学带来了新模式。研究表明,采用数字化技术能够帮助学生理解各类手术的术前计划、手术过程和术后预测,更能加深学生对复杂解剖结构的学习和掌握。机器人辅助手术技术通过对髋臼注册、股骨注册、髋臼磨锉的方向和假体的定位等的实时手术操作演示,对关节外科的临床教学提供了一种可行的新方案,大大缩短了学生手术培训时间,提高了学生对关节外科的学习兴趣。在本研究中,机器人辅助手术实验组学生在股骨头坏死等常见髋关节疾病的解剖等理论知识掌握方面,以及股骨头坏死的体征和临床意义、关节置换的术前规划操作能力以及 THA 的操作要点和注意事项方面数据优于对照组,究其原因是由于机器人辅助系统能够清晰直观的对髋关节的解剖结构进行展示,并能够在手术过程中实时提供髋臼的深度、角度和位置以及截骨的位置,增强了初学者的空间位觉和手术视觉能力,充分说明了机器人辅助手术技术具有明显的教学优势。
传统教学模式中,教师输送知识多为单向,在学生对临床诊疗思维、动手操作能力等最重要的临床能力培养方面具有一定的局限性。机器人辅助技术应用到教学实践,可以增强学生们主动参与的积极性。教师带领学生进行 THA 前的手术规划、术中导航以及术后评估的临床教学,相对于人工徒手进行髋关节置换,充分发挥了学生主动性,着力培养了学生的临床诊疗思维能力;同时,由于机器人操作技术在手术操作部分更加注重,为客观评价机器人辅助技术在教学中的效果,笔者对基础理论教学内容和操作技能的考核也侧重于髋关节置换的共性部分。但需注意的是,机器人辅助技术进行髋关节置换的术前规划和注册更为重要,涉及假体的位置安放等,在具体应用时需谨慎操作。从本研究的调查问卷结果来看,机器人辅助技术发挥了积极作用,能有效激发同学们的学习兴趣,提高理论知识水平以及临床教学的满意度。
综上所述,机器人辅助技术作为一种新的教学辅助模式,在临床教学过程中为满足临床医学教学需求提供了一种新的教学手段,能激发学生主动学习课程的兴趣和积极性,增加教学内容的生动性,有效调动师生互动,有助于加强学生临床思维及技能操作培养,提高学生的临床实践能力,在关节外科临床教学领域的应用前景广阔。
