基于RBF神经网络的离心泵地脚螺栓松动故障诊断
2022-10-17宋礼威张翊勋陈泽宇张宇航范传翰肖幸鑫董亮
宋礼威,张翊勋,陈泽宇,张宇航,范传翰,肖幸鑫,董亮*
(1. 中广核工程有限公司核电安全监控技术与装备国家重点实验室,广东 深圳 518124; 2. 江苏大学国家水泵及系统工程技术研究中心,江苏 镇江 212013)
卧式离心泵作为工程常用的旋转机械设备,发生故障会带来离心泵性能下降,甚至安全事故.地脚螺栓松动是卧式离心泵常见的故障形式,往往是由于机械安装质量不高及长期振动所引起[1].地脚螺栓松动故障的存在会导致卧式离心泵机组异常振动,电动机轴和泵轴不对中等故障的产生,严重时甚至会破坏卧式离心泵零件结构,造成重大事故,因此对离心泵地脚螺栓松动故障的诊断就显得尤为重要[2-3].
目前,超过30%的卧式离心泵故障都是由地脚螺栓松动引起的.在卧式离心泵安装时地脚螺栓未拧紧,或者卧式离心泵长时间工作都会导致地脚螺栓松动故障的发生概率大大提高.地脚螺栓松动故障与转子不对中、不平衡故障有明显区别.转子不对中故障的频谱特征频率为2APF(APF为转速频率),发生转子不对中故障时,相对于正常状态下会出现2APF.转子不平衡故障的频谱特征频率为1APF,当发生转子不平衡故障时,相对于正常状态下,1APF处的幅值会明显增大.而地脚螺栓松动故障的频谱特征频率为3APF,当出现地脚螺栓松动故障,相对于正常状态下会出现3APF.
在故障提取和识别方面,国内外的专家学者做了大量的尝试.左庆林等[4]应用共振调节法和经验模态分解法(EMD),准确提取出了故障特征.鲍志鹏等[5]通过傅里叶变换和EMD结合,准确地诊断了齿轮箱故障.刘忠等[6]采用改进VDM对离心泵空化声发射信号进行特征提取,从而准确判断出空化的产生.赵斌娟等[7]利用RBF神经网络预测得到叶轮内表面的边界涡量流分布.HAO等[8]通过形态学多尺度分析的方法提取故障特征,对原信号进行频谱分析,提取能量、重心等指标,最后利用支持向量机(SVM)的方法实现故障分类.SUGUMARAN等[9]将决策树和模糊分类方法相结合,在同一个框架下完成了特征提取和故障识别,很大程度地提高了故障诊断的准确率.QIAO等[10]利用小波分析方法,提取振动信号的能量,将其作为故障特征并利用SVM进行识别.KAWABE等[11]提出了一种“局部学习化神经网络(PNN)”,通过粗糙集理论将获取的故障特征信息作为PNN的输入集,实现了某化工厂离心泵转子类故障的诊断识别.综上所述,选择合适的故障提取和识别方法能够有效地诊断和识别故障.
文中主要通过EMD对地脚螺栓松动电涡流位移信号进行分解,提取故障特征,如能量占比等参数,输入到径向基(RBF)神经网络中进行训练,再通过测试集数据验证神经网络,从而大大提高卧式离心泵地脚螺栓松动故障诊断的准确性.
1 相关理论
1.1 经验模态分解原理
EMD是一种将信号分解成固有模态函数(IMF)的方法,其特点是不需要借助任何定义好的函数作为基底,而是通过原信号自适应生成IMF,可以用于非平稳、非线性信号的分析,具有很高的信噪比[12].
EMD分解时的假设条件为
1) 原始信号x(t)至少存在2个极值.
2) 时间尺度特性是由2个极值点之间的时间尺度确定的.
3) 上下包络对称.
IMF必须满足如下条件:
1) 时间尺度上满足过零点m=极值点n,或者|m-n|<1.
2) 在任意时刻上包络线和下包络线的平均值均为0.
通过EMD和IMF的假设定义,信号分解过程如下:
1) 寻找原始信号x(t)中全部的局部极大值与极小值点,通过曲线拟合方法连接各个极值点,构成上包络线emax(t)和下包络线emin(t);
2) 由上下包络线构造出其均值曲线m1(t),再由原始信号x(t)减去均值曲线m1(t)可得f1(t),f1(t)在理论上是第1个IMF分量,即
(1)
f1(t)=x(t)-m1(t).
(2)
3) 但由于在分解过程中会出现过拟合和欠拟合的情况,需要再次进行筛分.因此将f1(t)作为新信号进行筛分,不断循环,直至筛分阈值SD低于限值(一般取0.2~0.3),将筛选出来的信号记为a1(t),即
(3)
4) 计算残差r(t),即
r(t)=f1(t)-a1(t).
(4)
1.2 RBF神经网络原理
RBF的结构属于前馈型,相比较于其他神经网络,RBF神经网络具有在整个搜索空间的全局优化性能和最佳逼近的性能[13],因此在模式识别等领域得到了广泛的应用.RBF神经网络由输入层x、隐藏层q和输出层y组成[14],其结构如图1所示.
RBF神经网络隐藏层的激活函数选择高斯函数,计算式为
(5)
式中:x为n维输入参数;ci为第i个隐含层节点的中心,且与x有相同的维度;σi为第i个高斯函数的方差;|x-ci|为欧式范数.
RBF神经网络的输出层计算式为
(6)
式中:i=1,2,…,h为隐含层的节点数;wi为隐含层到输出层的权值;yi为第i个神经元的输出值.
2 离心泵工作参数及测点布置
文中采用单级卧式离心泵,基本工作参数:比转数为49.9,额定转速为2 900 r/min, 额定流量为10.6 m3/h,额定扬程为26 m,额定轴功率为1.78 kW/h.在数据采集中,采样频率设置为25 600 Hz,采样时间为1 s.电涡流传感器是一种非接触性的传感器,具有抗干扰性、灵敏度高、不受油污等介质影响的特点,能够很好地反映转子轴系的振动位移.文中采用2个电涡流传感器测量转子的振动位移,传感器的安装夹角为90°,如图2所示,其具体型号与参数:型号LD980-Y,采样范围0.5~2.5 mm,采样能力20 kHz/s,精度0.01%.
3 地脚螺栓松动故障特征提取
在额定转速2 900 r/min,额定流量10.6 m3/h下,以正常状况和编号为1的地脚螺栓松动故障工况为例,地脚螺栓安装示意图如图3所示.将采集的电涡流信号数据滤波处理通过快速傅里叶变换(FFT),结果如图4所示,图中f/fn为倍频,f为不同运行工况下对应的信号频率,fn为额定转速2 900 r/min对应的转子转速频率(48.33 Hz),流量系数σ为在同一转速工况下实际流量与对应流速下额定流量的比值,s为振动位移的幅值.
对比正常状态和地脚螺栓松动状态下的频域瀑布图,可以看出正常状态下主要以1APF为主,也会出现2APF,3APF等谐波分量.在地脚螺栓松动的状态下1APF的幅值有所下降,而3APF的幅值显著增大,这说明地脚螺栓故障的特征倍频在3APF.
对正常状态和地脚螺栓松动状态下的电涡流信号数据进行EMD分解,结果如图5所示.通过EMD分解出正常状态和地脚螺栓松动状态下的各层IMF,并计算各层IMF能量占比和各层IMF与原函数之间的相关系数,如表1所示.
从表1中可以看出,在正常状态下,IMF1—IMF2与原函数相关系数比较大,IMF8次之.离心泵转频和地脚螺栓松动的特征频率主要集中在低频段,将IMF5—IMF8层作快速傅里叶变换(FFT)变换,如图6所示.从图6a中可以看出,在IMF8层中能够提取到的离心泵转频48.33 Hz(1APF)对应的幅值为0.085 00 mm,此时相关系数为35.5%,能量比为8.5%.在IMF7层频谱图中出现147.50 Hz(3APF),此时对应的幅值为0.031 16 mm,能量占比为1.4%.从表1中还可以看出,在IMF5—IMF8层间IMF8的相关系数和能量占比都是相对最大的.这与1APF起主要作用有关,符合离心泵正常运行时的典型位移信号.

表1 正常状态及地脚螺栓松动状态下各层固有模态函数振动位移信号的相关系数和能量占比
在地脚螺栓松动状态下,从表1中可以看出IMF8层的相关系数和能量占比在IMF5—IMF8层间最大,此时48.33 Hz(1APF)的幅值为0.050 00 mm,相对于正常状态下的相关系数、能量占比和幅值都相应降低.IMF7层中的相关系数为16.10%,能量占比为2.70%,从图6b中可以看出,此时147.50 Hz(3APF)的幅值为0.031 71 mm,相对于正常状态下的相关系数、能量占比和幅值都有所增大,这符合离心泵地脚螺栓松动的故障特征.由此表明,上述所提出的方法能够准确、有效地提取出地脚螺栓松动的故障特征,为后续的故障识别奠定了基础.
4 RBF神经网络故障诊断的实现
4.1 网络设计
RBF神经网络通过Matlab平台搭建,其中输入层神经元个数由特征参数决定,由于文中选取IMF5—IMF8层的相关系数和能量占比,因此RBF神经网络的输入层个数为8,输入量为1行8列向量.输出层个数设置为1,输出量为“1”或“0”,其中“0”代表正常,“1”代表故障.均方误差目标(Goal)设置为0.001,径向基拓展速度(Spreed)设置为1.6,拓展速度越快,训练曲线就会越光滑.由于文中采用了newrb函数,所以不需要设置中间隐藏层,通过不断叠加中间隐藏层个数,直到满足输出误差为止.
4.2 网络训练
文中各提取30组正常和地脚螺栓松动故障的数据,共60组数据,每组数据采样1 280个点,在正常和地脚螺栓松动故障的数据中随机抽取20组共40组作为训练样本,先对随机抽取的40组训练样本进行EMD分解选取IMF5—IMF8层并计算各层相关系数和能量占比构成8维特征向量,输入到RBF神经网络中进行达标训练,剩下的20组样本同样计算出相关系数和能量占比作为测试样本进行测试.训练时,选取故障信号为标签1,正常信号为标签0.
4.3 识别结果
训练完成后,网络误差曲线如图7所示,图中γ为误差,N为迭代次数.从训练样本意外的数据中提取正常和故障各10组数据对网络进行检测,测试结果如表2所示,表中θ为识别率.
通过20组数据对RBF神经网络进行测试,发现只有第9组测试数据的预测值偏差比较大,其余19组数据的预测值都在误差范围之内,RBF神经网络的故障诊断准确率可达95%.
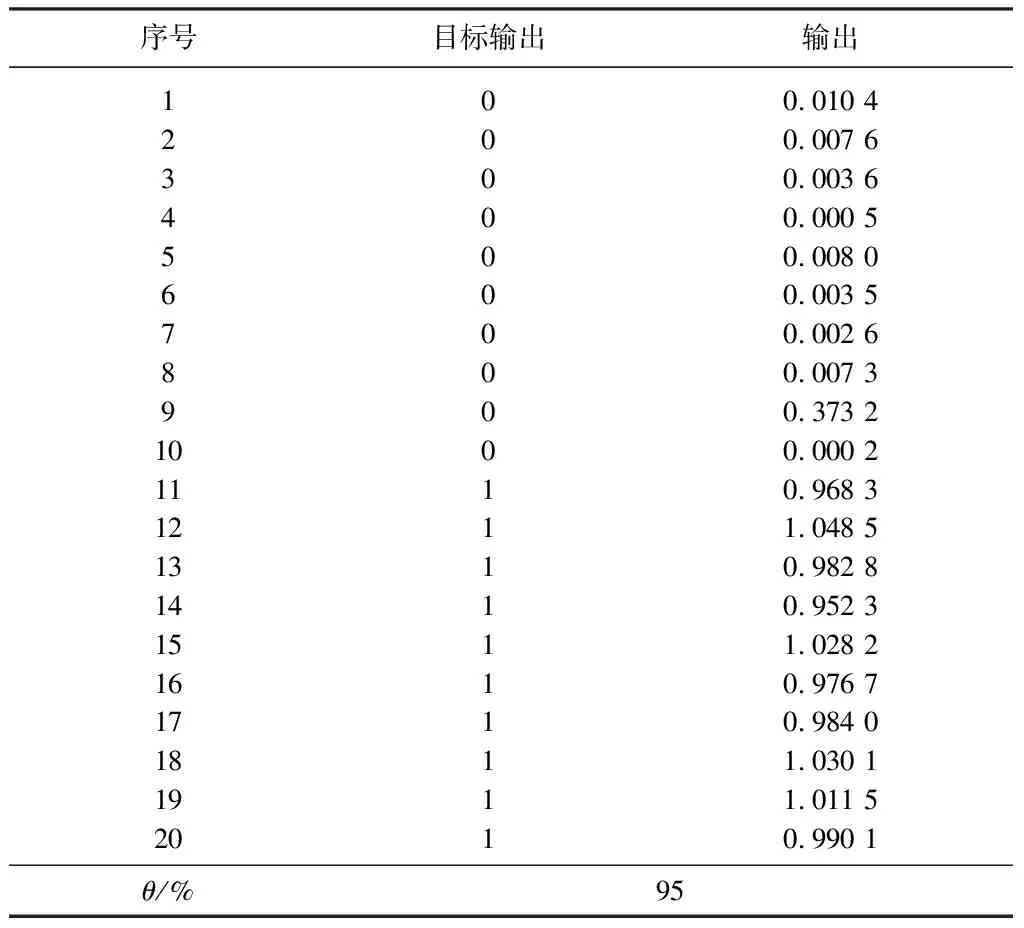
表2 RBF神经网络诊断结果
5 结 论
1) 卧式离心泵地脚螺栓发生松动时,3APF处的幅值会增大,1APF处的幅值会减小.
2) EMD方法可有效提取出离心泵地脚螺栓松动故障特征,IMF5—IMF8层可作为离心泵地脚螺栓松动故障特征分量.
3) 通过提故障特征分量的相关系数和能量占比构成特征向量,采用RBF神经网络对离心泵地脚螺栓松动故障进行识别,准确率可达95%.
