含异构微源孤岛微电网内虚拟同步发电机预同步控制策略
2022-10-17刁伟业曾进辉涂春鸣
兰 征,刁伟业,曾进辉,何 东,涂春鸣,姜 飞
(1. 湖南工业大学电气与信息工程学院,湖南省株洲市 412007;2. 国家电能变换与控制工程技术研究中心(湖南大学),湖南省长沙市 410082;3. 长沙理工大学电气与信息工程学院,湖南省长沙市 410076)
0 引言
孤岛微电网可以就地利用分布式电源(distributed generator,DG)保障海岛或偏远山区的电力供应,同时能实现一定范围内的零碳能源网,可有效推动“双碳”目标的落实,并已步入快速发展阶段[1-3]。 含异构微源的孤岛微电网(islanded microgrid with heterogeneous distributed generators,HDG-MG)中接入了物理结构不一,控制方法各异的异构微源,呈现出不一样的暂态特性[4]。在HDG-MG 中,燃气轮机和柴油机等属于同步发电机(synchronous generator,SG)型微源,而风机、光伏和储能等属于逆变器接口型微源(inverterinterfaced distributed generator,IIDG)[5],为了使IIDG 具备阻尼特性、惯量和组网能力,IIDG 常采用虚拟同步发电机(virtual synchronous generator,VSG)控制,该类型的IIDG 一般直接称为VSG[6]。
在HDM-MG 中,VSG 和SG 等异构微源组成了机械转子设备和电力电子装置并存的复杂系统。VSG 主电路由电力电子器件组成,相比于机械转子设备,其过压、过载能力差,并网时产生的冲击电流容易对主电路造成损害[7]。由于HDM-MG 中各微源在结构和控制方法等方面存在差异,HDM-MG 的暂态特性和外特性与常规电力系统区别较大,使得VSG并网过程中更易产生暂态冲击、频率波动等问题,且源网耦合影响容易导致VSG 同步失败甚至整个微电网系统失稳[8]。因此,HDG-MG 对VSG 并网友好性提出了更高的要求,需要更精准的预同步控制。
VSG 预同步控制过程中,一般利用锁相环(phase-locked loop,PLL)获取相位信息,然后通过比例-积分(PI)控制直接调节相位差为零来实现同步[9-11]。该方法存在两方面的缺点:一方面,PLL 的非线性增加了控制系统的复杂程度,使逆变器输出阻抗低频段呈现负电阻特性,加上HDG-MG 弱电网环境的波动较大,易导致VSG 失稳[12-13];另一方面,相角差PI 控制会产生周期性跳变,若PI 控制器输出直接加入VSG 频率环,会导致电压相位无法同步或VSG 频率反复波动使系统失稳等问题[14]。HDG-MG 是小容量系统,其对VSG 预同步过程中的电压和频率波动敏感,支撑能力不足,源网间的耦合会极大影响VSG的并网性能和HDG-MG的稳定性。
为消除相角差跳变对预同步环节的影响,解决思路主要有两个方向:1)改造相角控制器本身;2)改进相角控制器输入变量。文献[14-15]通过改进相角同步控制器结构,使控制器输出量连续,消除了相角差跳变对频率的影响。但这种改进方法额外增加了软硬件成本,而且仍然采用PLL 获取相位信息,无法解决PLL 带来的影响。因此,国内外学者将目光转移到改造相角控制器输入变量方面。文献[16]构造了新的相角输入变量,并利用其平滑特性解决相位跳变的问题,但新控制变量的构造过程烦琐,且所提控制结构使VSG 不再具备频率调节能力。文献[17]通过无PLL 的预同步控制减小了VSG 并网时的冲击电流,实现了VSG 空载并网,但该方法不适用于VSG 带负载并网的情况。文献[18-19]提出了基于虚拟功率的预同步方法,把相角差转化为虚拟功率,保证相角控制器输出信号的连续性。然而,该方法无法利用虚拟功率实现幅值同步,需额外设计幅值同步控制器,并且相角同步需在幅值同步完成后进行,增加了同步时间。
针对含异构微源孤岛微电网中VSG 并网的问题,本文提出一种基于虚拟电流的VSG 预同步控制策略。利用虚拟电流q轴分量的微分项构造新变量,实现不使用PLL 完成VSG 带负载与孤岛微电网同步并网,避免了PLL 和相角差跳变对VSG 预同步精准性和稳定性的影响。为提高系统的动态性能,建立了预同步控制环节的小信号模型,分析不同参数对预同步过程的影响,并设计合理的预同步控制器参数。通过MATLAB 仿真和基于StarSim 硬件在环半实物仿真实验平台证明了理论分析的正确性和所提策略的有效性。
1 基于相差控制的VSG 预同步控制策略及相角差跳变问题分析
1.1 基于相差控制的VSG 预同步控制策略
基于相差控制的VSG 预同步控制策略如附录A 图A1 所示。当VSG 需要并网时,中央控制器发出预同步指令,PLL 将检测到的VSG 和HDG-MG的电压相位传输到相角控制器中,将相位作差后通过PI 控制器形成频率补偿量加入VSG 有功环。同样的,幅值差经幅值控制器形成幅值补偿量加入VSG 无功环。当VSG 的频率、相位和幅值满足并网标准后,控制器发出并网指令,隔离开关S 闭合,完成同步。
一方面,基于相差控制的VSG 预同步控制策略需要PLL 获取相位信息,影响了弱电网系统的稳定性和控制器的动态性能,国内外已有较多文献对此进行了详细分析[20-23],本文不再赘述。另一方面,该策略在实际应用中会产生相角差跳变的问题,导致同步时间增加,甚至系统失稳,下节将对相角差跳变产生机理进行详细分析。
1.2 相角差跳变问题分析
电压相角的变化范围是0~2π,且每个周期内均存在从2π 到0 的跳变。由于两个系统的电压相角不可能完全相等,跳变也将发生在不同时刻,导致HDG-MG 与VSG 的相角差出现周期性跳变。相角差跳变机理如附录A 图A2 所示,假设HDG-MG 与VSG 频率已经实现同步,HDG-MG 电压相角θg超前VSG 输出电压的相角θVSG,相角差为θe=θgθVSG。t1时刻,θg达到最大值2π 并将在下一刻跳变为0。然而,由于θVSG的滞后,θVSG还没有达到峰值,θg却减少了2π,所以t1~t2内的相角差则变为θe-2π。
忽略积分器作用,单位周期内VSG 相角的调节量Δθ为:
式中:Kp为比例系数;A1、A2分别为相角正、负调节量。当A1>A2时,相角调节量Δθ>0,相角差不断减小,原则上可以实现相角同步。但A2的存在使相角反向调节,延长了同步时间。当A1≤A2时,Δθ≤0,系统不能完成相角同步或者使VSG 滞后一个周期再与微电网同步,不仅容易导致VSG 频率不稳定,还增加了同步失败的风险。
比例系数Kp的大小决定了跳变的程度,较大的比例系数会加剧频率的波动甚至导致系统失稳。同时,也无法通过将比例系数Kp设为0 来消除相角差跳变的影响[24]。在附录A 图A1 的预同步环节中相位调节系统的闭环传递函数G1(s)及其特征方程为:
式中:ωn为额定角速度;ξ为阻尼系数;Ki为积分系数。当Kp=0 时,ξ=0,相角控制器为纯积分控制,式(3)存在一对纯虚根±jKi,系统为等值振荡系统,系统不能稳定。
因此,VSG 预同步需要改变相角调节器输入量或者改进控制器结构,减轻或避免相角差跳变带来的影响,以满足预同步环节快速、平滑和精准的要求。
2 基于虚拟电流的VSG 预同步控制原理及策略
改进控制器结构和改变控制器输入变量都可以消除相角差跳变的影响。然而,前者仍然需要PLL获取相位,无法避免PLL 对系统稳定性的影响。相比之下,后者不需要PLL 的参与,降低了控制器设计的软硬件成本,且更加简单易实现。本章将基于改变控制器输入变量的方式实现VSG 与HDG-MG的预同步。
2.1 基于虚拟电流的VSG 预同步控制原理
VSG 与HDG-MG 等效电路如附录A 图A3 所示,VSG 的输出电压幅值为Uo,相角为θo;HDGMG 电压幅值为Ug,相角为θg。为实现VSG 的预同步,在两者间引入一个虚拟阻抗Zv,Iv和θv分别为通过Zv的虚拟电流的幅值和相位。
虚拟电流计算公式为:
当虚拟阻抗角θv=0°时,İv=0 在单位周期内有唯一解,此时θe=0°,两个系统电压的幅值和相位均相等,满足VSG 并网的条件。然而,当虚拟阻抗角θv≠0°时,虚拟电流İv=0 在单位周期内却有多个解,此时虽然可以满足虚拟电流为零的控制目标,但实际上这些解并不能保证幅值差或相位差已达到同步标准。因此,本文将虚拟阻抗设置为纯阻性,阻抗角θv=0˚,则虚拟电流İv与电压偏差U̇e同相位,虚拟电流的表达式如下:

式中:Ue为虚拟阻抗两端电压的幅值差;Rv为虚拟电阻。
预同步过程中各相量的关系如附录A 图A5 所示,ivd、ivq分别为虚拟电流在d、q轴上的分量。当VSG 的电压超前HDG-MG 电压时,虚拟电流在q轴上的分量ivq>0,反之ivq<0。而当两个电压向量完全相等时,满足ivd=0,ivq=0,此时两者相位差和幅值差为0,实现了VSG 与HDG-MG 同步。由此可见,虚拟电流在q轴上的分量可以表征VSG电压与HDG-MG 电压的相位关系。同理,虚拟电流在d轴上的分量可以表征两者之间的幅值关系。因此将变换到dq坐标系中,控制ivd=0、ivq=0 以实现预同步。
坐标变换表达式如下:
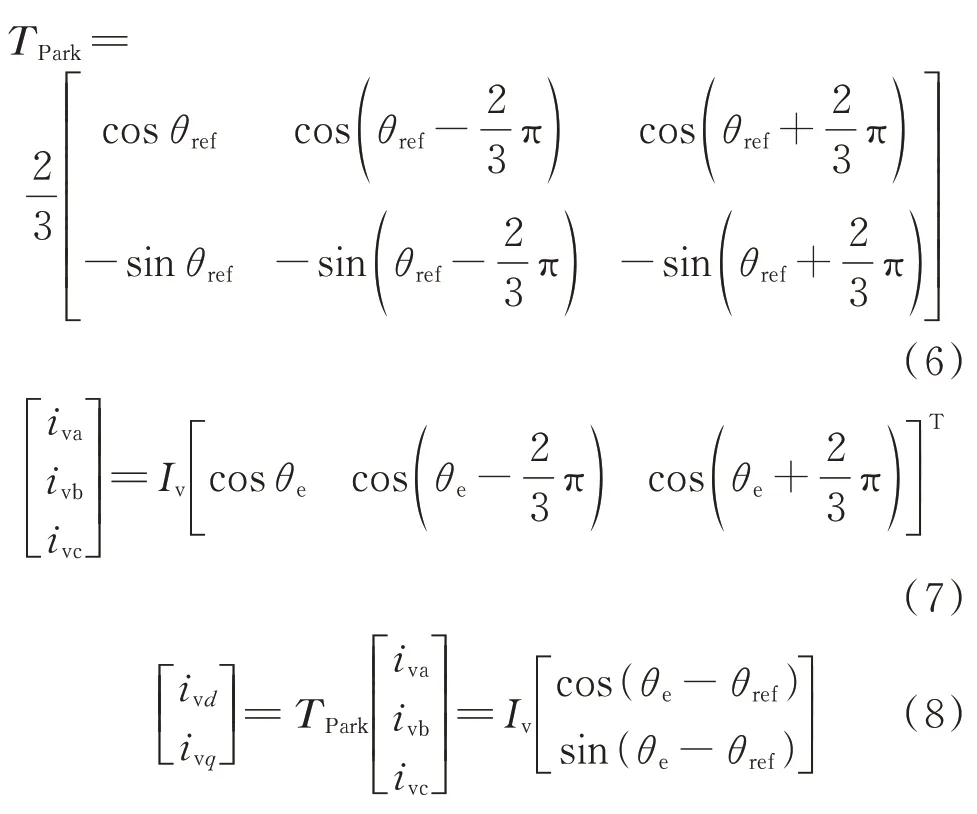
式中:TPark为Park 变换矩阵;θref为坐标旋转的额定角速度;iva、ivb、ivc为虚拟电流在abc 坐标系下的分量。
由式(8)可知,ivd、ivq均为振幅为Iv的三角函数。令d轴与a 轴重合可得:

ivq的函数图像如图1(a)所示,可以看出,在θe=π时,同样可以实现ivq=0 的控制目标,不满足相角控制器精准性的要求。因此,为保证对相位的精准控制,对相位调节器的输入变量ivq做进一步的改进。

图1 ivq和Y 的函数图像Fig.1 Function images of ivq and Y
对ivq求导并重新构造新的相位控制器变量Y,改进过程如式(10)、式(11)所示。新变量Y是周期为2π 的余弦函数,如图1(b)所示,且仅在相角差θe=0 或2π 时有Y=0,保证了相角调节的准确性。


式中:i′vq为ivq的导数;isq,ref为isq的参考值。
与此同时,单位周期内Y仅有一个拐点,在0~π、π~2π 上保持单调和连续。当相角差为θe1时,Y运行在a点,如果此时发生相位差跳变,相位差减少2π 到θe2,Y将跳变到b点。Y的函数性质使其在a、b两点的函数值和变化趋势保持相同,因此Y不会受到相位差跳变的影响,满足了相位调节的平滑性和连续性要求。
2.2 基于虚拟电流的VSG 预同步控制策略
基于虚拟电流的VSG 预同步控制策略如图2所示。当接收到预同步指令时,电压监测装置将VSG 与HDG-MG 的电压信息传输到预同步控制器,两者作差后通过虚拟阻抗Rv,将虚拟电流进行坐标变换得到ivd、ivq。在幅值同步环中,ivd与参考值ivd,ref比较后,经过积分环节形成幅值补偿量ΔU,与无功环节中产生的电压U相加得到VSG 电动势电压的幅值E,其中Kdi为幅值调节器的积分系数。类似地,将ivq的微分项isq与参考值ivq,ref作差后经过相位调节器得到频率补偿量Δω,与VSG 有功环节中产生的角速度ω相加得到VSG 电动势电压的角速度ωVSG,其中Jv、Dv为相位控制器的虚拟惯量系数和调节系数。需要指出的是,在预同步控制环中加入限幅器,可以防止幅值补偿量ΔU和频率补偿量Δω的变化幅值超出允许范围,避免影响系统的稳定性。
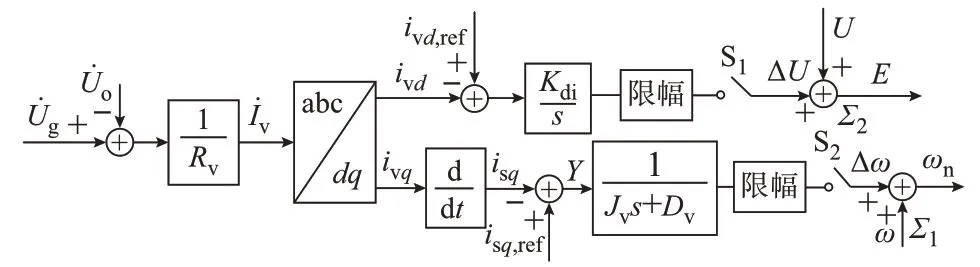
图2 基于虚拟电流的VSG 预同步控制策略Fig.2 Pre-synchronization control strategy of VSG based on virtual current
根据国家标准GB/T 12325—2008《电能质量供电电压偏差》[25]的相关规定,并网时应保证三相电压的允许偏差为额定电压的±7%内。在实际同步过程中,VSG 和HDG-MG 输出电压的幅值差距不大,因此预同步的重点是相位调节[17]。预同步环节开始后,闭合S1、S2,当幅值差和相角差满足并网标准后将隔离开关闭合。最后,在预同步完成后,断开S1、S2,并将预同步控制器中的积分环节置零。
2.3 预同步控制器参数整定与分析
1)预同步控制器参数整定
为提高预同步控制器的动态性能,本节将分析不同控制器参数对预同步过程的影响,并设计合理的控制参数。相位预同步环节的小信号模型如附录A 图A6 所示,VSG 的主要参数见附录B 表B1。
基于虚拟电流的VSG 预同步策略的开环和闭环传递函数分别为:
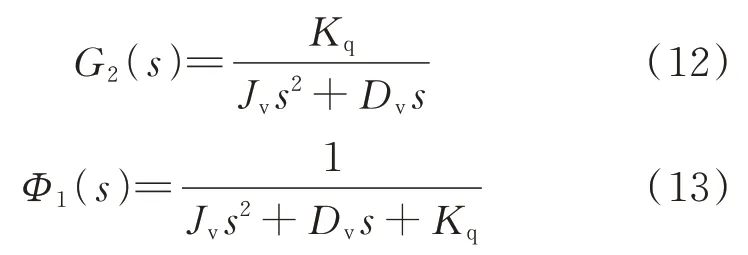
式中:Kq=cos Δθ/Rv。
从控制系统的稳定性和动态响应两个角度对参数Jv、Dv和Rv的取值范围进行约束。
式(12)中令s=jω,可得:

控制系统的幅值裕度A(ω)为:

令A(ω)=1,可进一步求得截止频率ωc和相角裕度γ,当γ在30°~60°范围内时系统性能较好[26]。
式(13)的超调量σ如下:

式中:ζ为阻尼比。超调量σ介于1.5%~25.4%之间时,系统动态性能较优[27]。
经上述分析,得到Rv、Jv和Dv的关系曲面和各自取值范围如图3 所示,图中黄色填充部分为控制器运行区域。
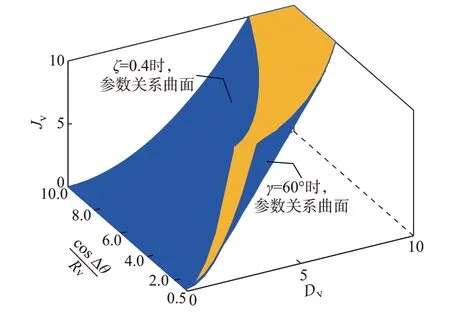
图3 Rv、Jv和Dv的取值范围示意图Fig.3 Schematic diagram of value ranges of Rv, Jv and Dv
Rv的取值范围原则上较宽,当取值较小时会缩短同步时间,但会使虚拟电流过大,导致VSG 输出电压和电流的冲击较大,经综合考虑,虚拟阻抗取值为1。
误差带在2%时的调节时间ts如下:

显然,调节时间ts与Jv成正比,与Dv成反比。为获得较短的调节时间,选取Jv=0.03,结合图3 中Dv的取值范围为0.2~0.3,以步长为0.01,画出其闭环极点分布图如附录A 图A7(a)所示。
随着Dv增大,预同步控制器的闭环极点远离虚轴,稳定裕度增大,振荡减小,调节时间减小。Dv变化下闭环极点分布均匀,说明Dv对控制器有持续影响。
选取Dv=0.3,计算Jv的取值范围为0.03~0.07,以步长为0.005 画出Jv变化时闭环极点分布如附录A 图A7(b)所示。当Jv增大时,预同步控制器的闭环极点越来越靠近虚轴,且极点分布越来越密集,Jv参数的增大对控制器的影响越来越小。极点越远离虚轴,振荡越小,调节时间越短,稳定性越强。
将上述设计参数代入式(13),可得预同步控制器的阶跃响应曲线如附录A 图A8 所示。由图A8可知,在Dv一定时,预同步控制环阶跃响应的超调量随着Jv的增大而增大,同时上升时间与调节时间也随着Jv的增大而增大。当Jv一定时,预同步控制环阶跃响应的超调量随着Dv的增大而减小,但上升时间却随着Dv的增大而增大,调节时间相应减小。因此,在参数整定时对于Jv的选取需综合考虑系统的各项性能指标,对于Dv的选取需综合考虑超调量、上升时间以及调节时间的变化。综上,本文设计Dv=0.25、Jv=0.05 作为预同步控制环节的值。
2)预同步控制器参数对VSG 稳定性的影响
由于单机预同步控制时输出相位和功率的调节是解耦的[28],本文独立设计了VSG 控制环节参数[3]和预同步环节控制参数,为验证预同步参数Dv、Jv对VSG 运行稳定性的影响,建立了考虑预同步控制器的VSG 有功环小信号模型,如附录A 图A9 所示,其闭环传递函数为:

其中:
式中:En为额定线电压;Z为线路阻抗;J为VSG 转动惯量;Dp为VSG 的阻尼系数。
选取Jv=0.03,按照Dv的取值范围为0.2~1,以步长为0.05 画出Dv变化时VSG 有功环闭环极点分布图(见附录A 图10(a));选取Dv=0.3,Jv的取值范围为0.03~1,以步长为0.005 画出Jv的变化时VSG有功环闭环极点分布图(见附录A 图10(b))。由附录A 图A10 可知,Dv、Jv的变化对VSG 稳定性存在影响,但其对Ф2(s)主导极点影响不大。换而言之,Dv、Jv的变化对VSG 的稳定性影响程度较小。实际上,预同步环节只在VSG 准备并网前投入,同步时间较短,预同步控制环节中的Dv、Jv仅会在较小的时间尺度内对VSG的运行产生影响。其次,预同步控制器通过频率调节量Δω间接影响VSG 运行,原则上只要VSG 控制环节中的惯性参数J、阻尼系数Dp设计合理,预同步控制器参数对VSG 稳定性的影响可以忽略不计。
3 仿真与实验分析
3.1 仿真结果与分析
为验证基于虚拟电流的VSG 预同步控制策略的正确性和有效性,在MATLAB/Simulink 平台下搭建本文所提策略仿真模型和基于相差控制的VSG 预同步控制策略模型,仿真模型的主要参数见附录B 表B2。
3.1.1 基于相差控制的VSG 预同步控制策略仿真分析
基于相差控制的VSG 预同步控制过程如附录A 图A11 所示,VSG 带10 kW 负载独立运行,在1 s时开始预同步。预同步前HDG-MG 的电压相位超前VSG 电压相位35.5°。在1 s 时预同步开始,HDG-MG 的电压相位与VSG 电压相位缓慢靠近,相位差缓慢减小,在1.62 s 左右相角差达到同步标准。频率补偿量随着同步过程的进行缓慢减小。但由于相角差跳变的影响,使得预同步过程的频率补偿量呈现锯齿状,导致系统的频率不稳定,影响了VSG 的频率稳定性,在2 s 时断路器合闸并网,系统频率被钳位在50 Hz;输出功率在预同步过程中无明显波动,并网后根据下垂特性输出额定功率。
3.1.2 基于虚拟电流的VSG 预同步控制策略仿真分析
基于虚拟电流的VSG 预同步控制过程如图4所示。预同步前HDG-MG 的电压相位超前VSG 电压相位35.5°。在1 s 时预同步开始,两者相位差快速减小,在1.22 s 时相角差达到同步标准。频率补偿量连续变化,不存在跳变现象。此外,当相角差达到同步阈值时,由于预同步控制器存在惯性作用,频率补偿量缓慢减小,经振荡调节后,最终减小为0。此动态调节过程中的相角差均处在同步阈值以内,相位差很小,可视作预同步完成。
频率调节过程平滑,提高了系统的暂态性能,同时实现了频率与微电网同步,在断路器合闸瞬间频率有轻微波动,随即恢复正常。如图4(e)所示,在2 s 时断路器合闸,系统增大输出功率到额定功率,变化过程平滑。
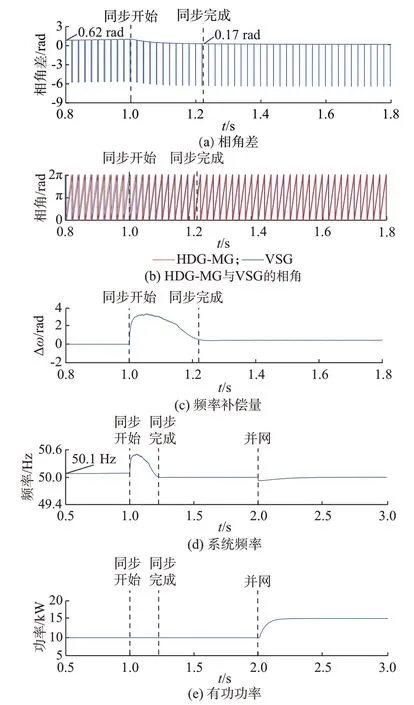
图4 基于虚拟电流的VSG 预同步仿真结果Fig.4 Simulation results of VSG pre-synchronization based on virtual current
3.2 实验结果及分析
基于StarSim 硬件在环半实物实验平台,搭建VSG 并入HDG-MG 的模型,实验平台照片如附录A图A12 所示。分别对基于相差控制的VSG 预同步控制策略和基于虚拟电流的VSG 预同步控制策略进行对比、验证。主要实验参数如附录B 表B3 所示。
3.2.1 基于相差控制的VSG 预同步控制策略实验分析
基于相差控制的VSG 预同步控制策略实验波形如附录A 图A13 所示。预同步开始后,HDG-MG电压Ug和VSG 输出电压Uo缓慢靠近,频率补偿量呈现锯齿状,0.7 s 后实现预同步。
3.2.2 基于虚拟电流的VSG 预同步控制策略实验分析
基于虚拟电流的VSG 预同步控制策略实验波形如图5 所示。预同步开始后,Ug和Uo迅速靠近,50 ms 后实现预同步。因此,相较于基于相差控制的传统预同步控制策略,本文所提预同步控制策略暂态响应速度更快,预同步过程更短。

图5 基于虚拟电流的VSG 预同步实验结果Fig.5 Experimental results of VSG pre-synchronization based on virtual current
4 结语
为实现含异构微源孤岛微电网中VSG友好并网,改善预同步过程中VSG 的频率稳定性和预同步控制器的动态性能,本文提出了一种基于虚拟电流的VSG预同步控制策略。通过仿真与实验得到以下结论:
1)通过控制虚拟电流,实现了带负载的VSG 与HDG-MG 电压幅值和相位的同步,且不需要PLL获取相位,避免了其对孤岛微电网系统稳定性的影响。
2)利用虚拟电流q轴分量的微分项改进相角控制变量,解决了基于相差控制的VSG 预同步策略中由相角差跳变引起的频率波动问题,使系统频率变化平稳,改善了预同步过程中VSG 的频率稳定性。
3)建立了预同步控制环节的小信号模型,分析了不同参数对预同步过程的影响,并通过设计合理的相角控制器参数,提高了控制器的动态性能。
本文仅对VSG 并网接入含单台SG 的HDG-MG的工况进行了验证,而HDG-MG 网内工况多样,存在多台SG 与VSG 运行的情况,其并网过程也更复杂。下一步,将在本文研究的基础上,针对HDG-MG 内复杂多样工况下的VSG 预同步问题进行深入研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。