双端柔性低频输电系统低频侧两相运行控制策略
2022-10-17吴小丹董云龙
吴小丹,卢 宇,董云龙,邹 强
(1. 南京南瑞继保电气有限公司,江苏省南京市 211102;2. 南瑞集团有限公司(国网电力科学研究院有限公司),江苏省南京市 211106)
0 引言
低频输电系统(low-frequency transmission system,LFTS)是一种输电频率低于工频的交流输电技术[1-2]。近年来,基于全桥结构的模块化多电平矩阵变换器(modular multilevel matrix converter,M3C)的LFTS 成为学术界和工业界的研究热点。基于M3C 的LFTS 综合了高压交流输电和高压直流输电的优点,在中远海风电送出中具有优势[3-6]。相比于采用高压直流输电的送出方案,基于M3C 的LFTS 方案可以省去造价高昂的海上换流站及直流断路器,且诸如低频断路器等相关设备可以沿用交流系统中成熟的技术及制造方法。LFTS 还可以用于向无源系统供电,或用于LFTS 组网,实现类似统一潮流控制器的潮流控制、暂态电压控制及动态无功支撑等功能[7]。
目前,在高压大容量LFTS 应用领域,主要有模块化多电平换流器(modular multilevel converter,MMC)、M3C 及六边形模块化多电平交交变流器等方案[8]。文献[9]研究表明,M3C 在控制灵活性、综合性能等方面具有工程应用前景。同时,M3C 也存在桥臂功率耦合关系复杂、内部环流通道较多而难以控制的难题[10-11]。目前,对M3C 的研究主要集中在系统建模及控制[12-17]、经济性分析及输出侧频率拓展控制[18-19]等方面。在LFTS 低频侧两相运行控制方面,文献[11,20]提出了拟方波方案,并开展了LFTS 两相输电的技术探索。然而,该方案并不适用于低频侧两相运行条件下双端或多端LFTS 的组网。此外,考虑到实际工程应用中需防止低频变压器发生过激磁、实现多端LFTS 组网及潮流控制等实际需求,该方案尚不具备实际工程应用条件。
本文以双端柔性LFTS 工程应用为背景对两相运行控制策略开展研究。为最大程度发挥LFTS 的潮流输送能力,LFTS 工程可设计低频侧两相运行控制策略,即在低频网侧线路中的一相因故障或检修退出运行时,LFTS 仍具有低频两相功率输送能力。因此,需针对该运行工况下的M3C 桥臂电容电压均衡、V/f构网控制及功率送出控制等多个方面开展深入研究。为此,本文系统地介绍了应用于工程的低频侧两相运行控制策略,开展了如下工作:
1)提出LFTS 低频网侧电压互反180°运行的理论依据。采用低频非故障相维持正弦及相位互反180°的运行策略,并给出工程V/f站及PQ站的总体控制要求。
2)提出满足LFTS 低频侧两相运行条件下,M3C 控制系统的设计方法。本文分别提出满足M3C 桥臂电容电压均衡的低频环流控制法、两相运行条件下基于静止坐标系统的V/f换频站低频构网及PQ换频站功率送出控制法。相比于dq旋转坐标系统下的M3C 解耦控制策略[6],所提策略可实现桥臂电流的精确控制,也可实现对桥臂非工、低频分量环流的抑制。同时,所提策略也可有效保障LFTS在低频侧两相运行条件下M3C 的稳定性及潮流控制能力。
3)分析LFTS 低频侧两相运行条件下,为满足M3C 桥臂不出现过流等约束下的LFTS 降额运行特性,并给出LFTS 的降额计算方法。
4)在实时数字仿真系统(real time digital simulation system,RTDS)中搭建双端LFTS 仿真模型。分别通过稳态、动态及暂态等典型工况进行仿真测试,验证所提方案的有效性和可行性。
需要说明的是,低频侧三相对称运行可视为两相运行的一种特例。因此,本文所提控制策略也可用于双端或多端LFTS 工程的三相运行控制。
1 双端柔性LFTS 简介及M3C 控制建模分析
1.1 双端柔性LFTS 简介
如图1 所示,类似基于双端MMC 的高压直流输电工程,双端柔性LFTS 中一个换频站为V/f站,其目的在于通过M3C 建立一个稳定的低频电压;另外一个换频站为PQ站,其目的在于通过M3C 控制低频侧输送受控的有功及无功功率,从而实现两个50 Hz 工频系统间的潮流控制、故障隔离及异步互联。
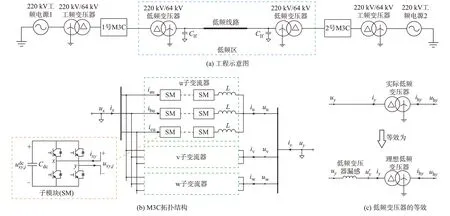
图1 双端柔性LFTS 示意图Fig.1 Schematic diagram of two-terminal flexible LFTS
图1(a)中,通过两个M3C 实现工频电网和低频电网的频率转换。定义以桥臂au、bu 及cu 组成的子变流器为u 子变流器,以桥臂au、av 及aw 组成的子变流器为a 子变流器,对v、w 子变流器及b、c 子变流器的定义类似。为保证工程经济性及M3C 工、低频网侧零序电压的互相隔离,分别在M3C 工、低频侧设置隔离变压器。工、低频变压器的64 kV 低压侧设计为角形结构,220 kV 高压侧设计为星形直接接地。M3C 分别连接三相工、低频交流系统;工频阀侧电网电压为ux(x=a,b,c),输入电流为ix;低频阀侧电网电压为uy(y=u,v,w),输入电流为iy;工频周期为Ts,频率为fs;低频周期为Tls,频率为fls;M3C 低频阀侧经低频变压器升压后的三相低频网侧电压为uhy,三相低频网侧输入电流为ihy;各M3C 的低频网侧等效电容为Clf。图1(b)给出了M3C 拓扑及其子模块(SM)结构,M3C 各桥臂由N个SM 串联组成,SM 直流侧电容容值为Cdc,桥臂xy中第j(j=1,2,…,N)号SM 的电流、输出电压及直流侧电容电压分别为ixy、uxy,j、udcxy,j,桥臂电感为L。各电气量定义的正方向如图1 中箭头所示。图1(c)给出了低频变压器的等效变换过程,根据低频变压器高、低压侧电压及组别,通过折算可得到虚拟的低频阀侧等效电压u′y以便用于M3C 低频侧输入控制。M3C 及低频变压器的参数如附录A 表A1 所示。
1.2 LFTS 低频侧两相运行控制要求
当低频网侧u 相因线路故障跳开后,LFTS 转入v、w 两相互反180°运行。此时,对V/f站而言,M3C 低频220 kV 网侧电压的控制目标为:
式中:Uhls为低频网侧对地电压幅值;ωls为低频系统角频率。
由图1(c)及附录A 表A1 低频变压器组别可知,控制低频阀侧等效电压u′y(y=u,v,w)满足式(2)时,则可等效于式(1)对低频网侧电压的控制要求。
式中:n为低频变压器的变比。
为便于分析,忽略220 kV 低频线路阻抗,假设LFTS 向PQ站低频侧传输的三相220 kV 电流ihu,pq、ihv,pq、ihw,pq为:
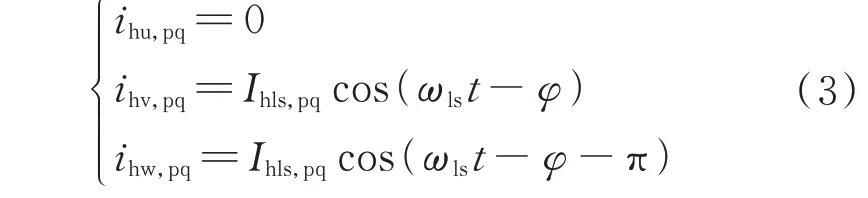
式中:Ihls,pq为220 kV 低频网侧线路电流幅值;φ为低频侧功率因数角。
根据式(1)及式(3),可得到通过220 kV 低频线路的有功、无功功率分别为:

因此,对PQ站而言,M3C 控制目标为控制LFTS 通过220 kV 低频线路向其端口送入的有功功率Ph,pq及无功功率Qh,pq恒定于系统设定的参考值。
1.3 M3C 数学模型及控制策略
M3C 及其控制策略是实现LFTS 低频侧两相运行的关键。为便于M3C 控制上的解耦并简化控制系统的设计,提出如下控制策略。
通过对M3C 各子变流器在工频侧控制输入工频正序电流实现各子变流器3 个桥臂电容电压总和的稳定。根据M3C 低频侧各相送入有功功率的差异,并结合工频侧输入的工频差模功率,通过微调各子变流器3 个桥臂间的低频环流[21-22],实现各子变流器3 个桥臂间的功率均衡。
对于V/f站的M3C,通过静止坐标系统下的数学建模及控制,实现220 kV 低频网侧两相电压的建立及稳定;对于PQ站的M3C,通过功率控制实现220 kV 低频侧送入有功及无功功率的恒定,V/f站和PQ站M3C 低频侧的控制目标均为生成M3C 低频阀侧输入电流指令。
将所述各环节控制生成的电流指令进行统一及综合,生成9 个桥臂的电流瞬时值指令,并通过静止坐标系统下的电流瞬时控制实现M3C 的稳定运行及LFTS 低频侧两相运行的总体控制目标。
1.3.1 M3C 桥臂电容电压控制理论依据
以图1 中的u 子变流器为例进行分析,在计及子变流器低频环流的条件下,u 子变流器的交流回路电压方程为:
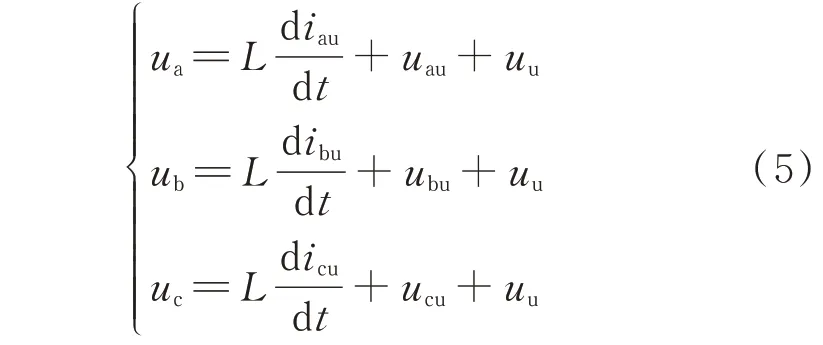
在M3C 处于稳定运行时,通过桥臂电流控制以确保低频侧输入电流在各子变流器3 个桥臂中均分。因此,对u 子变流器而言,其桥臂电流及桥臂输出交流电压可分别表示为:

将式(6)及式(7)代入式(5),进行abc 静止坐标系统向αβ静止坐标系统的克拉克变换,并进行工、低频分量的分离后即可得到:
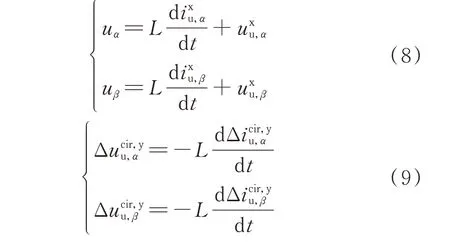
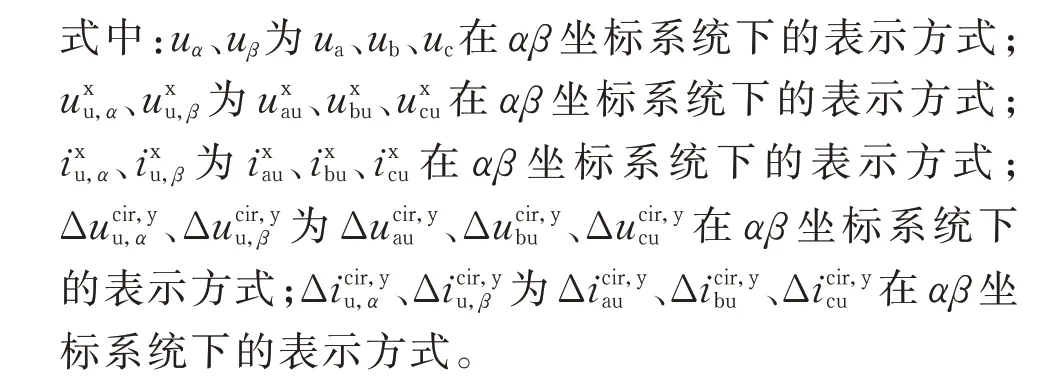
由式(8)及式(9)可见,对u 子变流器实现桥臂电容电压稳定控制时,作为共模分量的低频侧输入电流及低频电压对控制没有任何影响。通过式(8)可实现u 子变流器3 个桥臂电容电压总和的稳定控制,而通过式(9)进行u 子变流器低频环流控制则可实现u 子变流器桥臂电容电压的相间均衡。对v、w子变流器的桥臂电容电压控制过程完全相同,不再赘述。
1.3.2 M3C 低频侧输入控制理论依据
M3C 低频侧输入控制的目的在于,通过输入电流控制实现V/f站低频交流电压的建立[23-24]或PQ站有功及无功功率的送出。根据图1,以a 子变流器为例,得到其电压方程为:
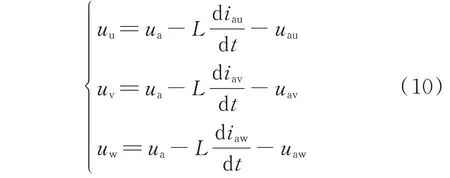
当低频侧输入电流被控制在u、v、w 子变流器3 个桥臂中均分时,将式(6)所得结论拓展到v、w 子变流器,代入式(10)并进行abc 静止坐标系统向αβ静止坐标系统的克拉克变换,得到:
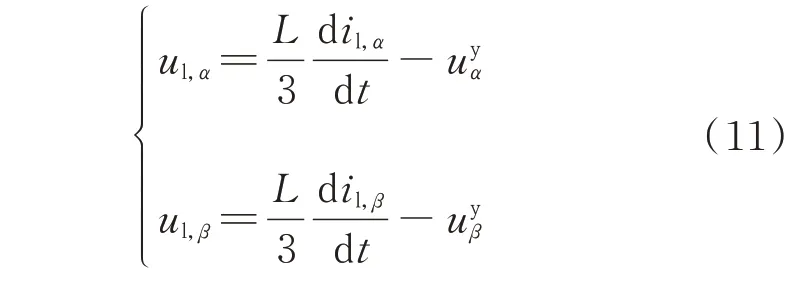
由式(11)可见,M3C 低频侧输入可实现统一控制。根据V/f站和PQ站的区别,需生成并选择不同的M3C 低频侧输入电流指令。但无论是V/f站还是PQ站,其低频输入电流控制方程均一致。
2 所提控制策略的实现
基于第1 章内容,图2 给出了所提LFTS 低频侧两相运行控制的总体方案。
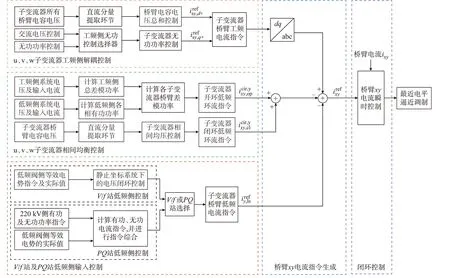
图2 LFTS 低频侧两相运行控制策略Fig.2 Two-phase operation control strategy on low-frequency side of LFTS
如图2 所示,所提控制策略主要包含以下几个主要部分:
1)u、v、w 子变流器工频侧控制,通过控制工频正序电流实现各子变流器桥臂电容电压总和的稳定,通过定工频交流电压或定无功控制实现M3C 与工频交流系统的无功功率交互;
2)计算工频侧总差模功率,并依据u、v、w 子变流器低频侧输入的有功功率,分别通过开、闭环低频环流控制实现各子变流器桥臂间的功率平衡;
3)低频侧通过输入电流控制实现低频交流电压的建立或低频侧有功、无功功率的送出;
4)将上述控制环节产生的电流指令按照图1 定义的方向进行综合,并根据V/f或PQ站的区别,在静止坐标系统下通过桥臂电流控制生成电压参考波后,利用最近电平逼近调制实现M3C 的稳定。
2.1 M3C 桥臂电容电压控制
如第1 章所述,所提方案对u、v、w 各子变流器独立控制,实现其桥臂电容电压的稳定控制。
2.1.1 桥臂电容电压总和控制
对各子变流器3 个桥臂电容电压总和进行控制时,通过控制各子变流器和工频交流系统的有功功率交互即可。控制目标为生成工频侧dq旋转坐标系统下的d轴有功电流i,d+,控制方程为:
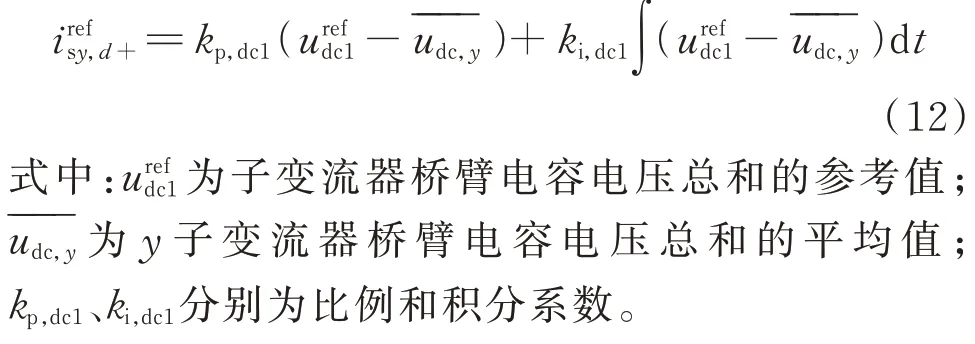
各子变流器工频无功电流i,q+通过自动电压控制(automatic voltage control,AVC)或定无功功率控制产生并统一分配至9 个桥臂,过程不再赘述。
2.1.2 桥臂电容电压相间均衡控制
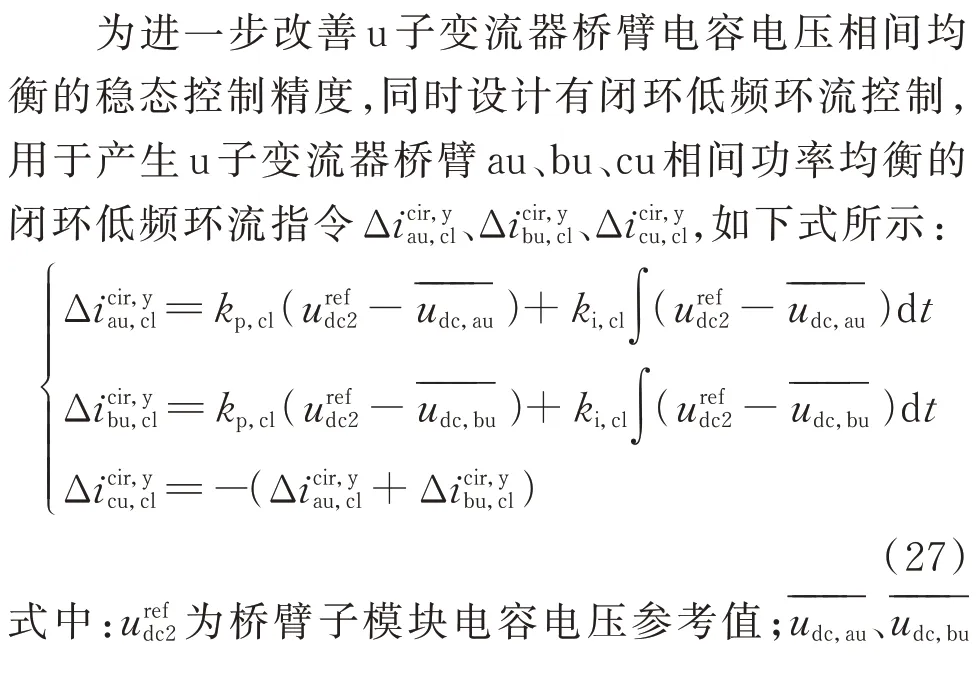
类似H 桥级联变流器,M3C 子变流器需实现桥臂间的电容电压均衡[25]。通过调节各子变流器内部的低频环流,可实现其3 个桥臂电容电压的相间均衡。为兼顾均衡控制的快速性和稳定性,采用开环及闭环环流的双重控制实现。
以u 子变流器为例分析其桥臂工频差模功率,在工频侧电压不对称状态下,u 子变流器工频侧向其3 个桥臂注入的有功功率可表示为:

式(13)给出的有功功率分别包含工频共模功率Ps,uc及工频差模功率Ps,aud、Ps,bud、Ps,cud。为便于分析u 子变流器各桥臂间的功率关系,在工频侧dq旋转坐标系统下进一步给出工频共模、差模功率表达式:
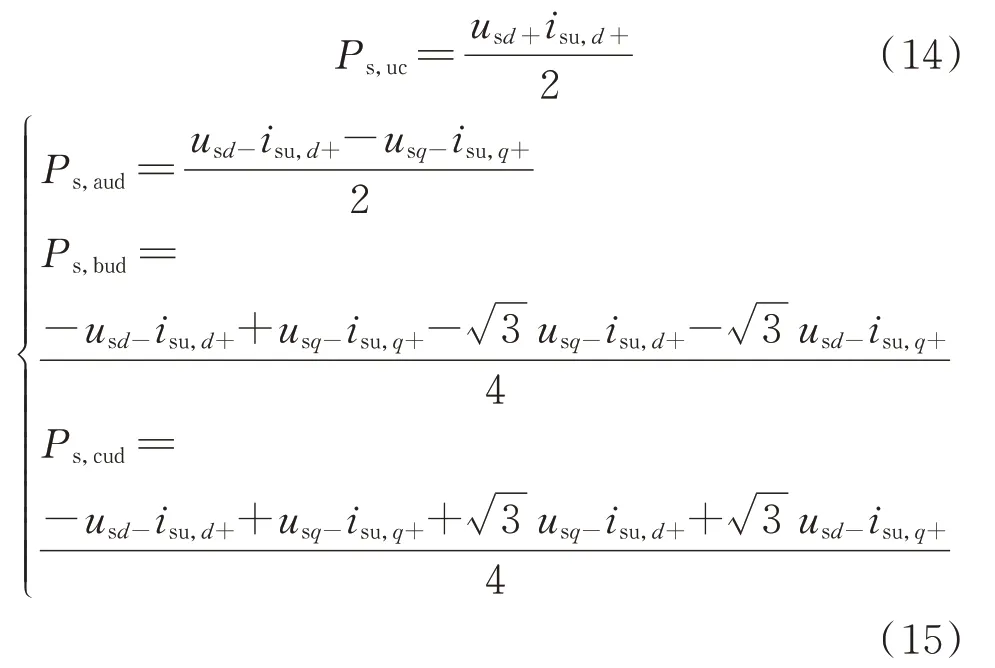
式中:usd+、usd-分别为工频侧电网电压的d轴正、负序分量;usq-为工频侧电网电压的q轴负序分量;isu,d+、isu,q+分别为工频侧输入电流在u 子变流器中对应的d、q轴正序分量;对v、w 子变流器中的相关变量定义类似。
由于M3C 桥臂电流同时含有工、低频电流,因此isu,d+、isu,q+无法直接获取。但是,在忽略M3C 损耗的前提下,由低频侧u 相送入u 子变流器的有功功率需从其工频侧完全送出。因此,通过计算低频侧送入的有功功率,并依据式(14)即可得到isu,d+。而isu,q+则可通过AVC 或定无功功率控制得以确定。
根据式(1)及式(3)可知,当LFTS 低频网侧处于两相运行模式时,M3C 低频阀侧实际处于三相不对称运行状态。因此,低频侧通过M3C 各子变流器送入的有功功率并不完全相等。而由第2.1.1 节可知,各子变流器输入的工频侧无功电流可保持一致,表示为:
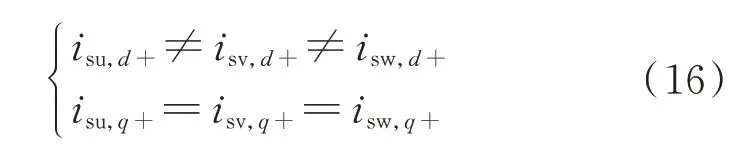
式中:isv,d+、isv,q+和isw,d+、isw,q+分别为工频侧输入电流在v 和w 子变流器中对应的d、q轴正序分量。
由式(14)及式(15)可见,u 子变流器3 个桥臂的工频差模功率之和为零,说明工频差模功率影响子变流器桥臂间的功率均衡,但不影响子变流器桥臂总功率平衡。而由式(15)可见,影响u 子变流器3 个桥臂工频差模功率的因素有usd-、usq-、isu,d+、isu,q+共计4 个变量。因此,为得到u、v、w 子变流器各桥臂的工频差模功率,需结合M3C 低频侧各相输入的有功功率,并依据式(13)—式(15)对工频侧总差模功率进行重新分配,从而得到各子变流器桥臂开环低频环流控制指令。
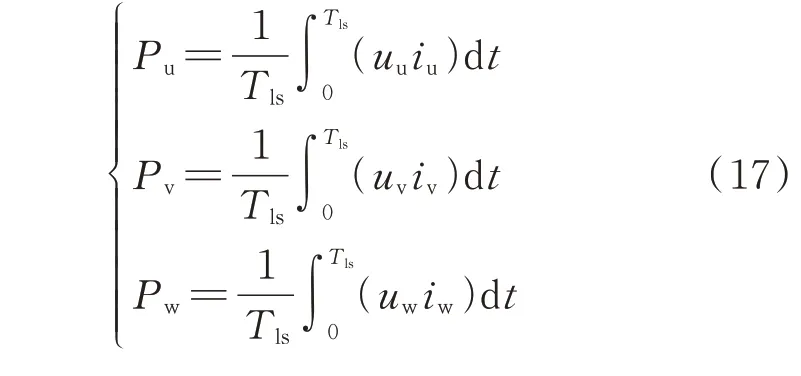
为此,第1 步首先计算M3C 低频侧从u、v、w 各相送入的有功功率,表示为:
为计算低频侧各相输入有功功率不同而导致的M3C 各子变流器工频侧差模功率差异,以式(17)中的Pu为基准,定义如下变量:
第2 步,计算由M3C 工频侧输入有功电流在工频系统不对称电压下产生的工频侧a、b、c 相差模功率Ps,ad1、Ps,bd1、Ps,cd1,表示为:
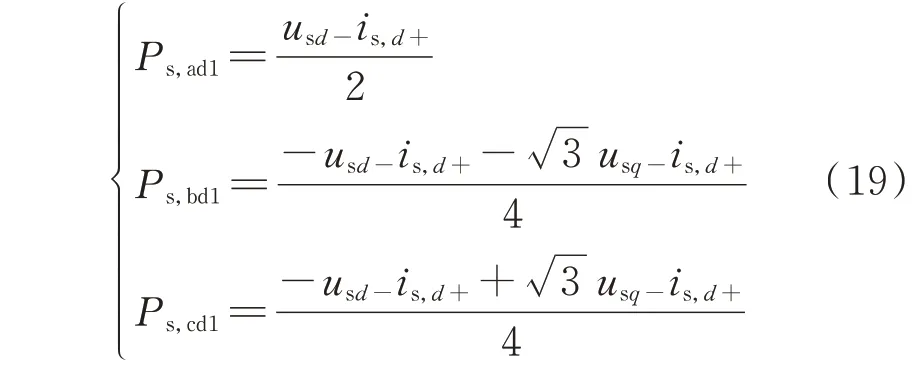
式中:is,d+为M3C 工频侧输入电流在工频侧dq坐标系统下的d轴分量。
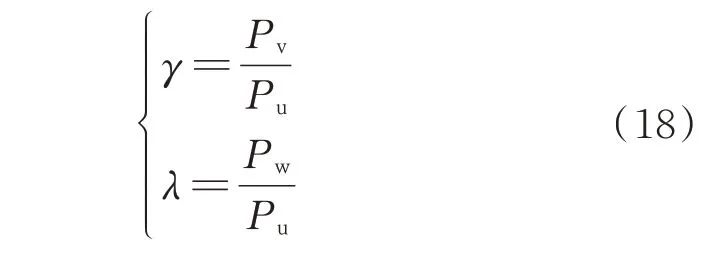
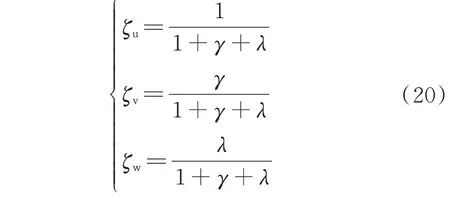
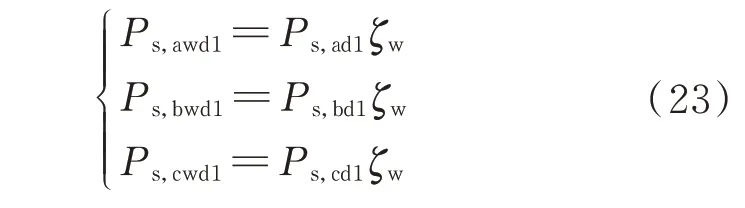
根据式(15)、式(18)及式(19),对由式(19)形成的工频侧输入总差模功率进行重新分配。首先,定义工频侧输入总差模功率在u、v、w 子变流器中的分配因子ζu、ζv、ζw,表示为:
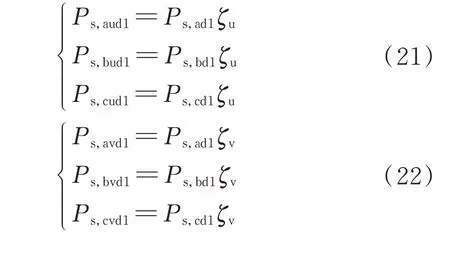
根据式(19)及式(20),即可得到u、v、w 各子变流器3 个桥臂的差模功率:
第3 步,计算由工频侧输入无功电流is,q+造成的u、v、w 共3 个子变流器差模功率。如前所述,由于M3C 工、低频无功功率解耦,且通过桥臂电流控制可实现工频侧无功电流在各子变流器中完全均分。因此,由式(15)可知,工频侧无功电流在u、v、w 子变流器各桥臂间产生完全相等的差模功率,表示为:
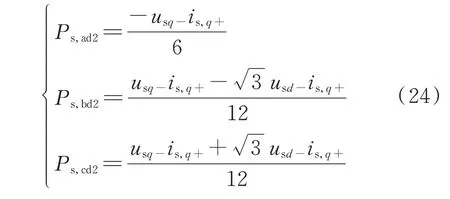
式中:is,q+为M3C 工频侧输入电流在工频侧dq坐标系统下的q轴分量。
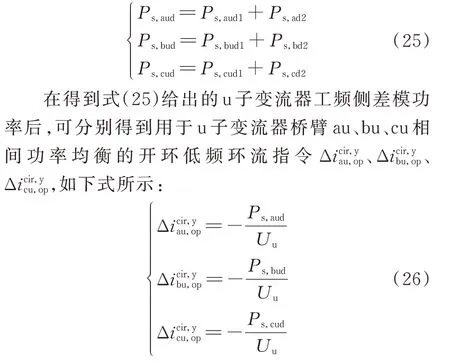
基于式(21)—式(24),可得到u、v、w 各子变流器3 个桥臂的差模有功功率。以u 子变流器为例,其3 个桥臂的差模有功功率如下:
式中:Uu为低频侧u 相电压的有效值。

综合式(26)及式(27)可得到u 子变流器3 个桥臂的低频环流指令为:

式(29)表明,u 子变流器3 个桥臂的低频环流指令之和为零,即低频环流不会流入M3C 低频侧。同时,为确保低频环流也不流入工频侧,需对式(29)给出的环流指令做进一步修正。首先计算得到a、b、c 子变流器中低频环流的零序分量为:
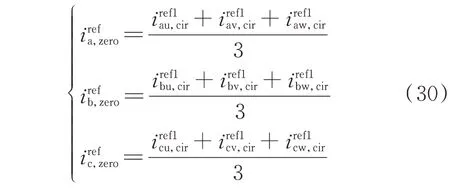
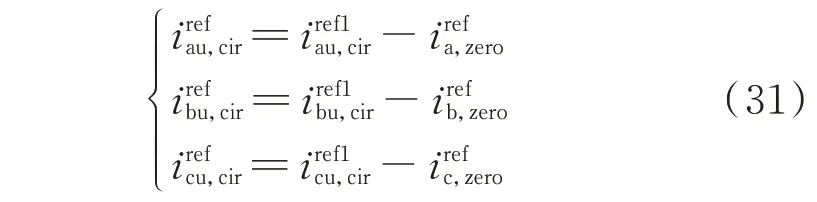
将式(28)得到的低频环流指令减去式(30)给出的零序分量,即可得到u 子变流器3 个桥臂最终的低频控制环流指令,如式(31)所示。v、w 子变流器低频环流的修正过程类似,不再赘述。
2.1.3 桥臂电容电压直流分量的提取
M3C 桥臂存在双频功率耦合,使得桥臂电容电压存在2fs、2fls、fs±fls共4 种频率的交流波动。而在考虑工、低频侧系统电压不对称条件下,各子变流器的桥臂电容电压总和则存在2fs、2fls共2 种频率的交流波动。因此,2.1.1 节、2.1.2 节所述的桥臂直流电容电压控制环节中,需通过合适的滤波器将对应电容电压中的交流波动分量滤除。本文采用滑差滤波器法[15],设计过程不再赘述。
需要说明的是,滑差滤波器在提取直流分量的过程中引入了一定的延时。因此,在设计直流电压控制器参数时,需适当降低其控制带宽。
2.1.4 用于电容电压稳定控制的桥臂电流指令
如前所述,通过对各子变流器的独立控制,可实现子变流器桥臂电容电压的稳定及工频侧无功功率控制。将2.1.1 节得到的式(12)及2.1.2 节得到的式(31)进行综合,得到最终用于u 子变流器桥臂电容电压稳定及工频侧无功控制的3 个桥臂的电流指令,如下式所示:
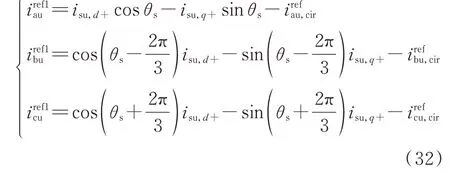
式中:θs为工频侧三相电网正序电压的相位。v、w子变流器的指令生成方程类似,不再赘述。
2.2 V/f 站M3C 低频侧输入控制
如第1 章所述,V/f站通过M3C 低频侧输入控制实现220 kV 网侧电压的建立。由图1(c)及式(2)可知,通过建立式(2)给出的低频侧等效电压,则可以实现式(1)给出的网侧电压控制目标。V/f站的M3C 低频侧端口电路如图3 所示,其中:Ltls为低频变压器折算至低压侧的漏感;C′lf为Clf折算至低压侧的电容;il,y为负载电流;u′y,vf为V/f站低频侧等效电压,通过采集V/f站220 kV 侧三相对地电压uhu,vf、uhv,vf、uhw,vf,并经式(2)计算得到。
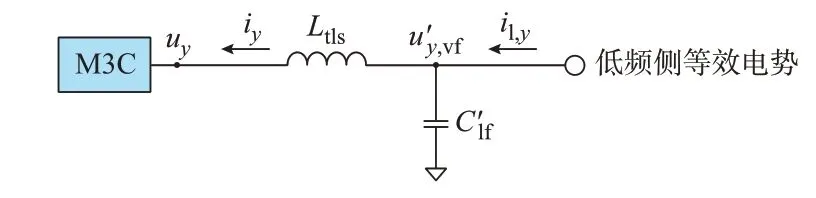
图3 M3C 低频侧输入模型Fig.3 Input model of low-frequency side of M3C
根据图3、式(11)并结合图1,可得到三相静止坐标系统下M3C 低频侧输入控制方程为:

而低频侧输入电流的关系为:

对式(34)进行拉普拉斯变换可得:

根据式(33)、式(35)及图1 定义的电流方向,且视负载电流il,y为扰动分量,通过三相静止坐标系统下的低频交流电压闭环控制,可得到V/f站M3C 低频侧三相输入电流指令,并按照电流均分原则分配给u、v、w 子变流器3 个桥臂,得到V/f站M3C 桥臂低频电流指令为:

式中:u为V/f站低频侧三相等效电势的参考值,由式(2)给出;kp,vf、ki,vf分别为低频电压闭环控制的比例、积分系数。
2.3 PQ 站M3C 低频侧输入控制
如第1 章所述,PQ站通过M3C 低频侧控制实现220 kV 端口送出有功、无功功率的稳定。由于M3C 低频侧处于不对称运行状态,M3C 低频侧输入电流会同时存在稳定的正、负序分量。
为得到PQ站M3C 低频侧输入电流指令,首先采集PQ站220 kV 侧三相对地电压uhu,pq、uhv,pq、uhw,pq,并根据PQ站低频变压器接线组别,通过折算得到PQ站低频变压器低压侧等效三相电势:
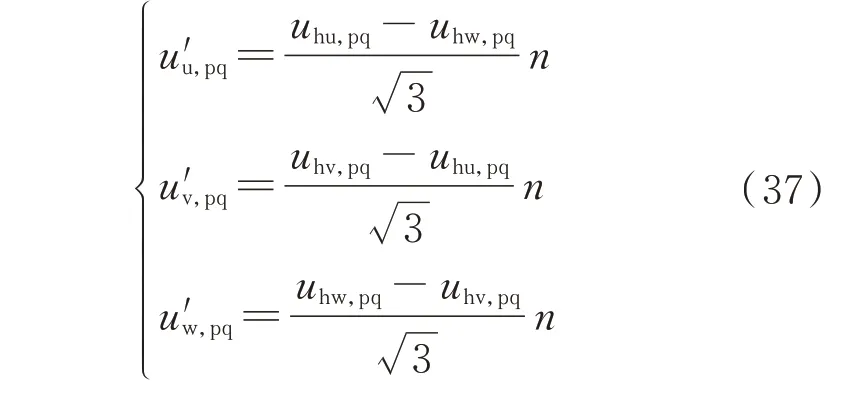
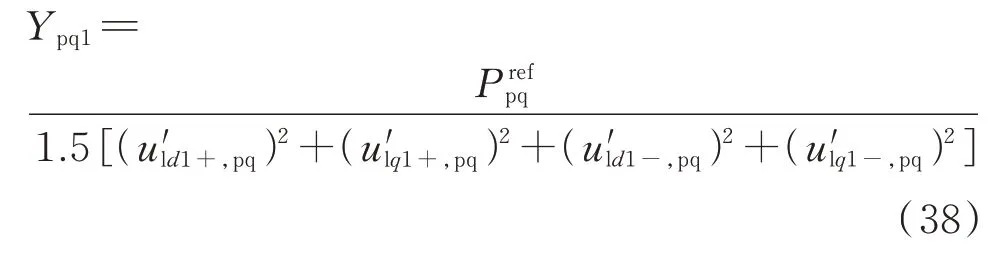
为便于实现有功电流指令的生成,将式(37)得到的等效电势u′u,pq、u′v,pq、u′w,pq通过正、负序分解得到αβ静止坐标系统下的正序分量u′lα+,pq、u′lβ+,pq,并通过对u′lα+,pq、u′lβ+,pq的锁相得到其相位θ′pq+。在以θ′pq+为角度的旋转坐标系统下,经过派克变换得到等效电势u′u,pq、u′v,pq、u′w,pq的正序d、q轴分量u′ld1+,pq、u′lq1+,pq及负序d、q轴分量u′ld1-,pq、u′lq1-,pq。
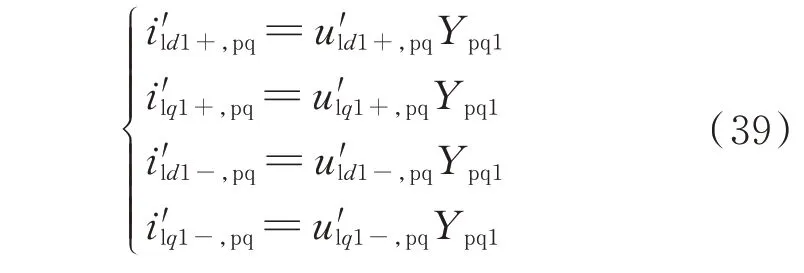
为得到M3C 低频阀侧有功电流指令,定义生成低频有功功率的有功类导纳Ypq1,根据低频有功指令P可得到:
得到dq坐标系统下正、负序有功电流指令:
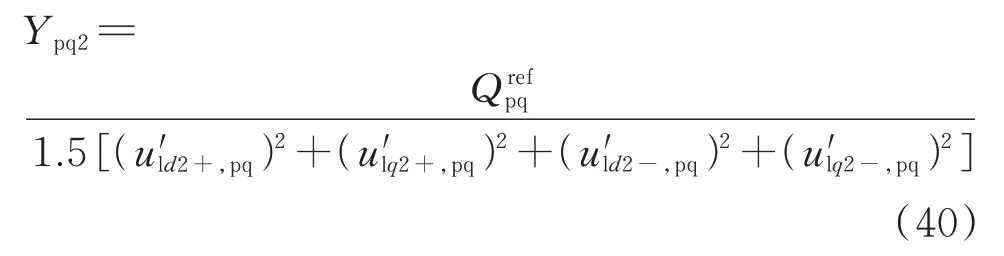
对无功功率控制,由于无功电流和有功电流相差90°,则可在以θ′pq-=(θ′pq+-π/2)为角度的旋转坐标系统下,经过派克变换得到等效电势u′u,pq、u′v,pq、u′w,pq的正序d、q轴分量u′ld2+,pq、u′lq2+,pq及负序d、q轴分量u′ld2-,pq、u′lq2-,pq。
同样地,为得到M3C 低频阀侧无功电流指令,定义生成低频无功功率的无功类导纳Ypq2,根据低频无功指令Q可得到:
得到dq坐标系统下正、负序无功电流指令:
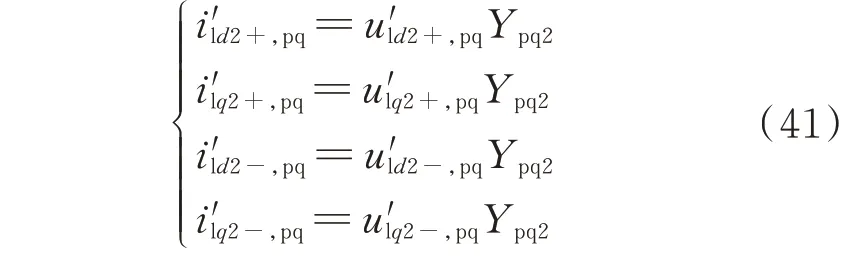
将式(39)和式(41)相加,得到PQ站M3C 低频阀侧输入的正、负序d、q轴电流参考值为:

由于所提控制策略基于桥臂电流瞬时控制,为得到PQ站M3C 低频阀侧输入电流指令,需将式(42)得到的dq旋转坐标系统下的电流指令转换为低频侧三相输入瞬时值电流指令,并按照桥臂进行电流均分,则可得到PQ站M3C 的u、v、w 子变流器桥臂低频电流指令,如式(43)所示。

2.4 M3C 桥臂电流指令的生成及控制
2.4.1 M3C 桥臂电流指令生成
如前所述,无论对V/f站还是PQ站,用于控制9 个桥臂电容电压稳定的电流指令均一致。根据两个换频站的性质,需对M3C 桥臂电流指令中的低频侧输入部分进行区分。
综上,根据式(32)、式(36)及式(43),结合图1中M3C 电流方向的定义,图4 给出了u 子变流器3 个桥臂电流指令的生成方式,v、w 子变流器桥臂电流指令生成方式类似。
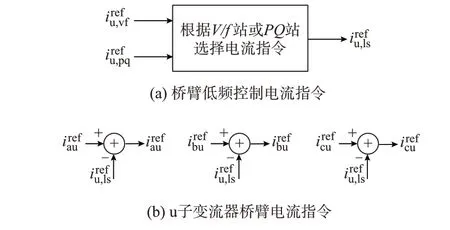
图4 u 子变流器桥臂电流生成方法Fig.4 Generation method of bridge arm current of sub-converter u
2.4.2 M3C 桥臂电流控制
由第1 章的说明可知,通过所述控制策略可实现9 个桥臂电流的完全独立控制。基于图4 给出的桥臂电流瞬时值指令并结合图1,即可得到桥臂xy的等效电路及其在静止坐标系统下的电流瞬时控制策略,如图5 所示。
根据图5,可得到桥臂xy在静止坐标系统下的控制方程为:

式中:Gf1、Gf2分别为工、低频侧电网电压前馈控制滤波器的传递函数;Gc为桥臂电流瞬时控制器的传递函数;i为桥臂xy电流参考值;u为桥臂xy输出电压参考值。
为获取类似dq旋转坐标系统下利用一阶低通滤波器对前馈电压的滤波效果,以增强系统的稳态特性及改善阻频特性,对工、低频电网交流电压的滤波采用复矢量低通滤波器[24]。以Gf1为例,有:
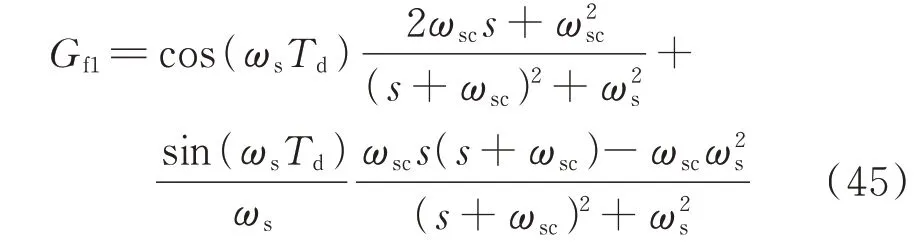
式中:Td为M3C 控制器延时;ωsc为复矢量低通滤波器截止频率;ωs为工频系统角频率。
桥臂电流控制器可采用比例控制器[12],如图5所示,M3C 桥臂电流控制开环传递函数为:

式中:kcp为比例控制器参数;KM3C为M3C 桥臂电流控制输出的增益,在低频段可近似为1。
设置桥臂电流开环控制传递函数的截止频率为fc,cur,则可得kcp为:
将式(47)代入式(46)可知,设置合理的fc,cur,则桥臂电流闭环控制传递函数在低频段近似为1。因此,使用比例控制器即可确保桥臂电流稳态精度及跟踪性能满足控制要求。
2.5 LFTS 降额运行分析
当LFTS 处于两相运行时,M3C 换频阀低频侧对地电压及输入电流在u、v、w 子变流器中呈现不对称状态。为确保LFTS 系统安全运行,需满足:1)220 kV 低频线路及M3C 低频阀侧对地电压不允许超过额定值,以确保回路对地绝缘安全;2)M3C低频阀侧输入电流不允许超过设计值,以确保换频阀低频侧设备热稳定安全。
以220 kV 的u 相断开为例,根据式(2)可知,若维持220 kV 低频网侧v、w 相对地电压为三相运行状态时的额定值,在忽略低频变压器漏感电压时,则M3C 低频阀侧w 相电压将上升为三相运行时的2/ 3 倍。因此,在LFTS 转入两相运行后需降压运行,降压幅度为三相正常运行时的 3 /2 倍。同样的分析适用于电流的降额运行。
综上所述,容易通过计算得到结论:LFTS 转入低频两相运行时,PQ站输出功率需降额运行。对本文在附录A 表A1 给出的研究案例,其输送功率需从三相运行时的额定300 MVA 降为150 MVA。
3 仿真验证
3.1 仿真设置
通过RTDS 实验平台验证所提控制策略的有效性。仿真接线如图1 所示。两侧工频交流电源均为220 kV 直接接地系统,分别通过220 kV/64 kV工频变压器降压后连接至M3C 工频阀侧,M3C 实现50 Hz 向20 Hz 的交交变换后,经64 kV/220 kV低频变压器升压后构成220 kV 低频网络。
仿真中基于M3C 的LFTS 启动控制时序为:1)1 号M3C 解锁并稳定桥臂子模块直流电压;2)1 号M3C 通过V/f控制建立220 kV 低频网侧电压;3)2 号M3C 解锁并稳定桥臂子模块直流电压;4)2 号M3C 通过PQ控制实现向220 kV 低频网络送出受控的有功及无功功率。
3.2 仿真结果
控制LFTS 潮流方向为V/f站向PQ站送入有功功率100 MW,送入无功功率50 Mvar。图6 给出了稳态运行下的仿真波形。
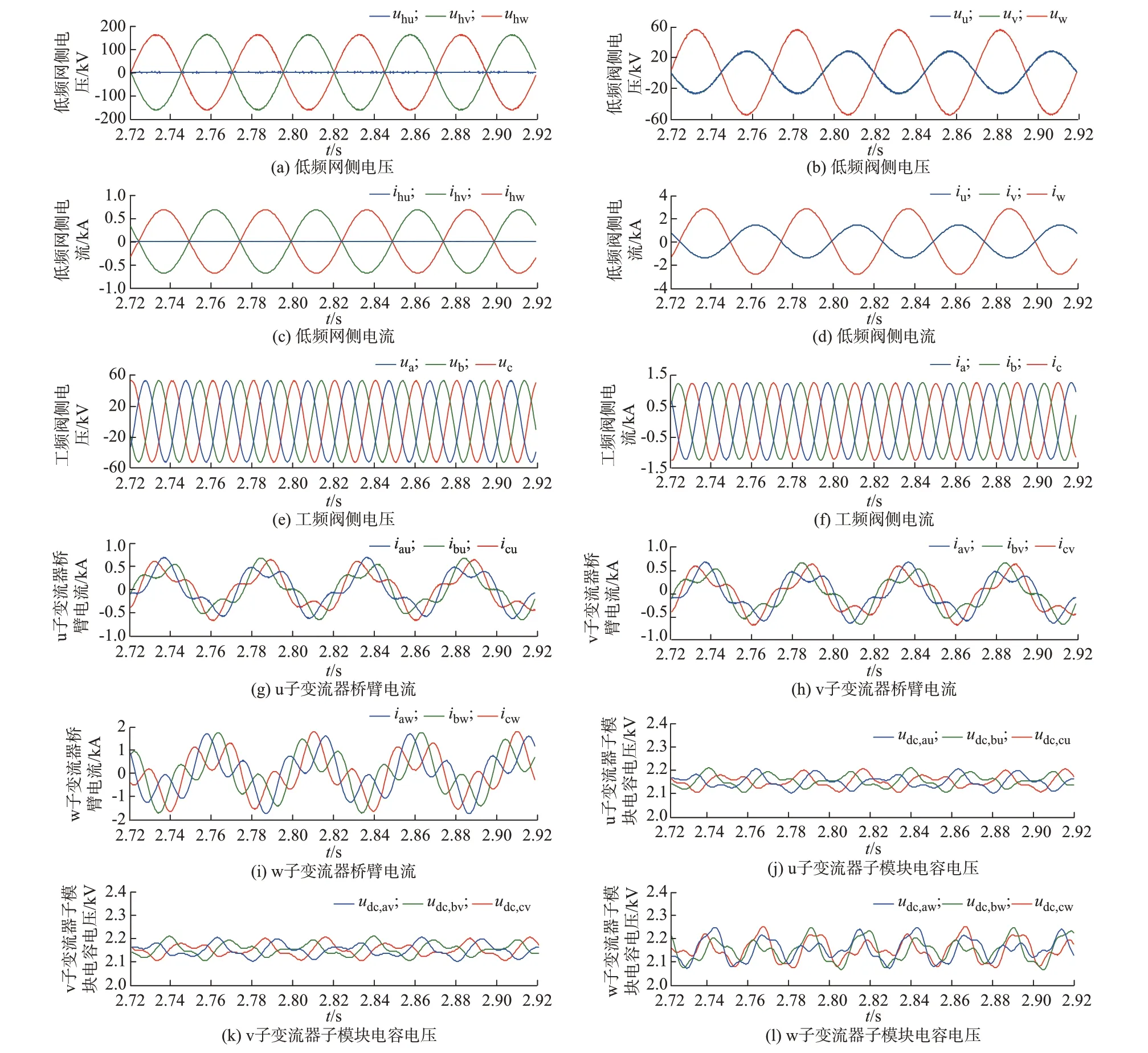
图6 稳态运行仿真波形Fig.6 Simulation waveforms in steady-state operation
图6(a)和(b)分别为V/f站建立的三相低频网侧电压和三相低频阀侧电压。由图6(a)和(b)可见,建立的低频网侧电压满足非故障相互差180°运行的要求,而M3C 低频阀侧电压则呈现三相不对称状态,且u、v 两相电压重合。低频网侧、阀侧三相电压的关系符合式(1)及式(2)给出的低频变压器相位关系。
图6(c)和(d)分别为PQ站三相低频网侧电流和三相低频阀侧电流。图6(e)为PQ站三相工频阀侧电压,图6(f)为PQ站三相工频阀侧电流。由图6(d)和(f)可见,M3C 工频、低频阀侧电流满足设置的功率控制要求,两侧正弦度控制特性良好且电流互相解耦。同时,低频侧同时包含有功、无功电流,而工频阀侧仅包含有功电流,说明M3C 工、低频侧无功功率是互相解耦的,符合理论分析的结果。
图6(g)、(h)、(i)分别为PQ站u、v、w 子变流器3 个桥臂电流波形,图6(j)、(k)、(l)分别为PQ站u、v、w 子变流器3 个桥臂子模块电容电压波形。由图6(g)、(h)、(i)可见,u、v、w 子变流器的桥臂电流同时含有工、低频电流分量,且桥臂电流呈现不对称状态。同时,相比u、v 子变流器,w 子变流器桥臂电流最大,这一结果符合理论分析的结论。结合图6(c)至(f)可知,通过M3C 可有效实现工、低频侧的隔离。所提控制策略在低频侧两相运行条件下具有优异的解耦特性。
为验证所提控制策略的动态控制性能,控制V/f站向PQ站送入的有功功率从75 MW 阶跃至150 MW,附录B 图B1 给出了其动态运行仿真波形。由图B1 可见,所提M3C 控制策略在动态过程中动态特性良好,桥臂电流跟踪指令值迅速且精度优异,低频侧电流响应时间在约0.5 个低频周期内,且工、低频两侧的解耦特性在动态过程中依然保持良好状态。此外,由图B1(g)也可见,在LFTS 仅输送有功功率的前提下,w 子变流器3 个桥臂电流的峰值达到了额定值,而u、v 子变流器3 个桥臂电流的峰值为w 子变流器桥臂电流峰值的1/2,这一结果符合1.2 节及2.5 节的分析。
为进一步验证所提控制策略在暂态过程中的控制性能,首先控制V/f站向PQ站送入的有功功率为75 MW,在V/f站220 kV 工频网侧设置单相接地故障,故障持续时间为0.5 s,附录B 图B2 给出了暂态运行仿真波形。由图B2 可见,所提M3C 控制策略在暂态过程中控制特性良好,工频侧不对称故障对低频侧功率送出没有影响,暂态过程中工频侧电流始终维持完全正序特性,表明所提控制策略可有效确保工、低频良好的解耦特性。此外,在暂、稳态过程中,所述滑差滤波器对桥臂电容电压直流分量的提取准确,所提低频环流控制可实现子变流器3 个桥臂间子模块电容电压的均衡,以确保功率器件在暂态过程中始终处于安全工作区。
综上所述,所提控制策略用于LFTS 低频侧两相运行时具有优异的工、低频解耦特性,波形正弦度良好且控制精准。在暂态控制过程中,所述控制策略仍然具有良好的故障穿越特性。
4 结语
本文系统地介绍了双端柔性LFTS 低频侧两相运行的基本要求及控制策略。首先,提出实现工、低频解耦的M3C 桥臂电流瞬时控制方案。针对低频侧两相运行这一特殊工况,通过对子变流器桥臂及输入、输出侧功率特性的分析,提出基于桥臂间能量再分配的双重低频环流控制方法,有效解决M3C 在暂、稳态过程中桥臂子模块直流侧电容电压均衡的难题。同时,给出了两相运行条件下V/f站和PQ站的低频侧输入控制策略。通过对各控制环节得到的不同电流指令进行综合,并在静止坐标系统下采用桥臂电流瞬时控制策略,实现两个换频站M3C 的有效控制。最后,搭建RTDS 仿真模型,通过稳态、动态及暂态控制仿真全面验证了所提控制策略的有效性。
本文所述V/f策略也适用于低频海上风电送出系统中M3C 的控制。在低频侧两相运行条件下,M3C 低频侧端口的阻频特性分析、工频侧交流系统故障条件下的综合限流策略等仍需进一步深入开展研究。此外,两相运行条件下线路及变压器等元件的继电保护特性也可作为下一步研究方向。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。