基于介度熵的机场飞行区关键冲突点识别*
2022-10-17王兴隆
王兴隆,尹 昊
(中国民航大学 民航飞联网重点实验室,天津 300300)
0 引言
飞行区内活动目标数量不断增加,导致飞行区内的潜在冲突变多,甚至引发地面活动目标相撞事件。因此,研究如何识别飞行区关键冲突点,对预防活动目标发生冲突,提高飞行区安全运行水平具有重要意义。
活动目标发生冲突的不安全事件大多发生于飞行区内,发生相撞则会造成无法估计的损失,汤新民等[1]建立了航空器滑行的动态系统模型,提出了1种基于混杂系统结构的滑行引导方案。Zhu等[2]提出了1种扩展混合Petri网对航空器滑行建模,检测航空器在交叉口的冲突。潘卫军等[3]建立了机场地面交叉口冲突概率估计模型,预防航空器地面滑行冲突。Xia等[4]提出了考虑航空器滑行轨迹是否存在时空重叠的热点区域识别算法。
当今,复杂网络理论在各行业有着广泛的应用,在民航领域也不例外。2000年,Amaral[5]首次将复杂网络理论引入航空领域,证明世界机场网络符合小世界网络模型特征。Zanin和Lillo[6]综述了近年来应用复杂网络理论研究航空运输的论文。Wang等[7]定义空中交通复杂度向量,提出1种基于复杂网络理论的空中交通态势描述方法,揭示空中交通复杂性的基本特征。党亚茹等[8]采用复杂网络中的关键指标,结合航空货物运输数据,分析如何合理新增航线和通航城市来解决航空货运枢纽城市运力不足的问题。程明等[9]用复杂网络分析计算飞行冲突事件演变过程。Wang等[10]基于复杂网络理论建立中国空域扇区网络模型,使用参数定量分析网络特征,提出空域扇区网络韧性的概念。刘飞等[11]基于机载防相撞系统模型对空域内的航空器进行网络建模,采用复杂网络指标结合层次分析法识别飞行冲突热点。吴明功等[12]对终端区的航空器进行网络建模,用复杂网络指标结合多属性决策法识别飞行冲突热点。
选取网络特征指标和关键节点识别,是复杂网络应用研究的前沿方向。Wen等[13]提出1种针对航空网络节点重要程度的识别方法。徐翔[14]根据不同类型的网络提出相应的基于邻接信息熵的节点重要程度识别方法。卢鹏丽等[15]将熵的概念与节点的介数中心性和度中心性结合,提出1种基于介度熵的节点重要程度识别方法。
由此可知,上述研究中存在以下不足:1)活动目标包括航空器和车辆,在研究飞行区内的冲突时只考虑了航空器,没有考虑车辆;2)主要研究交叉口或2架航空器之间的冲突,没有从整个飞行区的角度考虑。因此,本文针对上述不足,同时考虑航空器和车辆,建立机场飞行区交通态势网络,结合介度熵法评价各节点冲突指数,识别冲突指数最大的关键冲突点,给管制员提供应该重点关注的活动目标,一定程度上可提高机场飞行区安全性。
1 飞行区交通态势网络建模
飞行区交通态势网络是以飞行区内活动的航空器及车辆为节点,以活动目标之间的潜在冲突关系为连边建立。以每个活动目标的几何中心为圆心,一定长度为半径作圆,范围以内为每个活动目标的受威胁区域,该区域内的物体将对其产生一定影响,而范围外则无影响。当活动目标之间距离小于一定值时,受威胁区域发生重叠,对彼此产生影响,潜在冲突出现,将二者用1条表示潜在冲突的边连接。
由于在飞行区内的航空器滑行速度一般为20~60 km/h,车辆驾驶速度为40 km/h以下,考虑管制员发现情况后反应时间、下达指令时间、驾驶员发现冲突情况后的反应时间、根据规定做出相应操作的时间、活动目标制动系统作用时间,对节点间的连边做出以下规定:
以航空器几何中心为节点,150 m为半径作圆;以车辆几何中心为节点,100 m为半径作圆,当区域内2圆出现交集,说明2个活动目标之间存在潜在冲突,2个节点之间形成1条连边,从而建立飞行区交通态势网络模型,如图1所示。
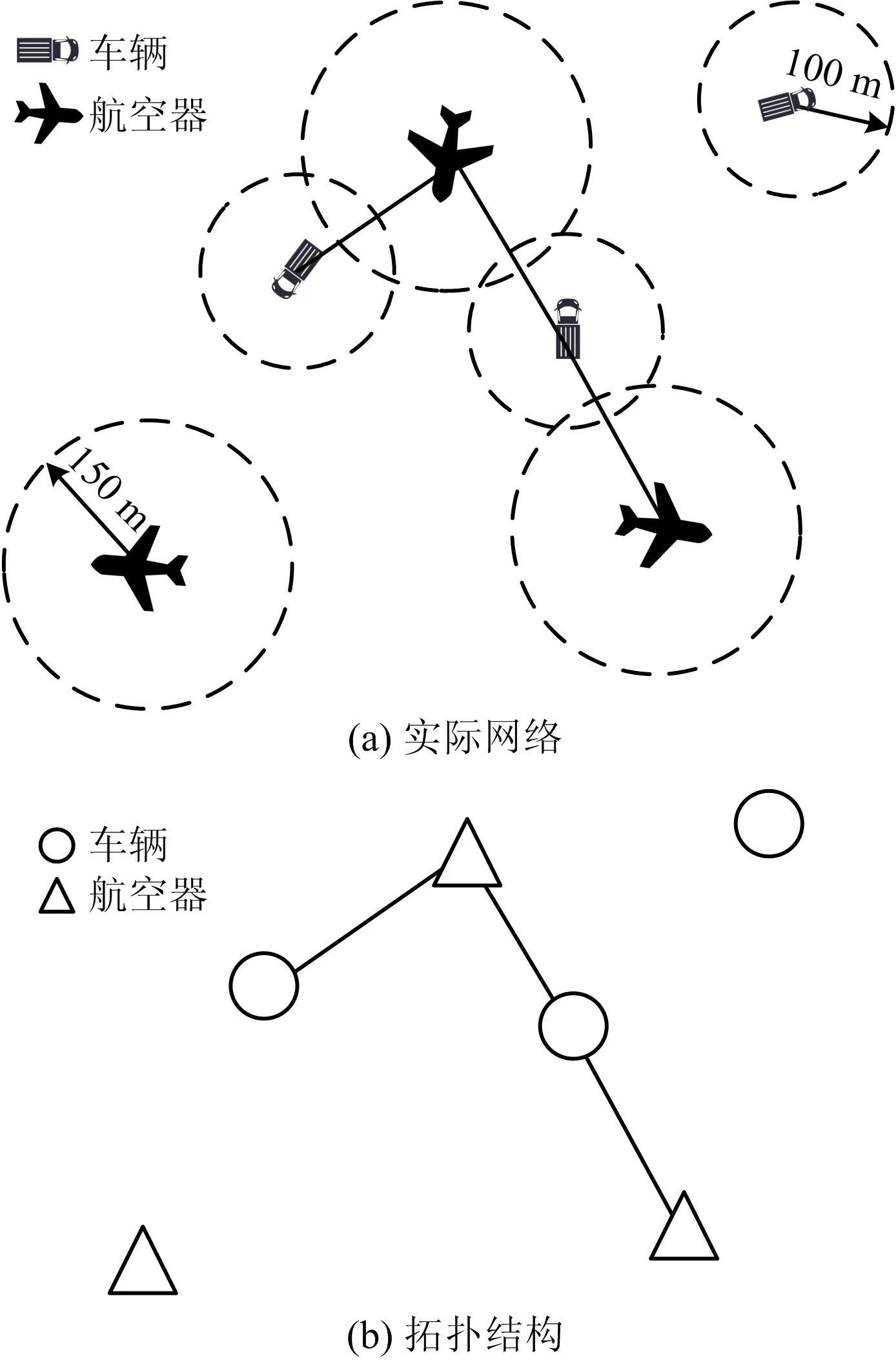
图1 飞行区交通态势网络模型Fig.1 Model of traffic situation networkin airfield area
为方便研究,做出如下简化假设和规定:
1)选取飞行区范围时,仅考虑飞行区内供航空器起飞、着陆、滑行和停靠使用的场地。
2)选取飞行区内活动目标时,只考虑正在发生位移且对网络产生影响的活动目标;对于正在对航空器服务的车辆,其与航空器之间的距离较近但无碰撞风险,故将其与航空器视为1个整体,活动目标间距离小于10 m不连边。
3)实际运行过程中,尽管活动目标高度不同,但产生冲突时高度的影响较小,故只考虑活动目标的二维信息。
4)建立活动目标之间的冲突连边时已考虑安全余度,因此以活动目标的几何中心为节点。
5)飞行区交通态势网络是无向加权网络,相对距离越小,相对速度越大,则边权越大。
飞行区实际运行中,活动范围较小,活动目标之间的相对速度也应用于评判其相互之间的冲突严重程度,故在计算网络边权时引入迫近率。如图2所示,2个活动目标位置和速度分别用P和V表示,距离用D表示。相对距离和相对速度的计算分别如式(1)和式(2)所示:
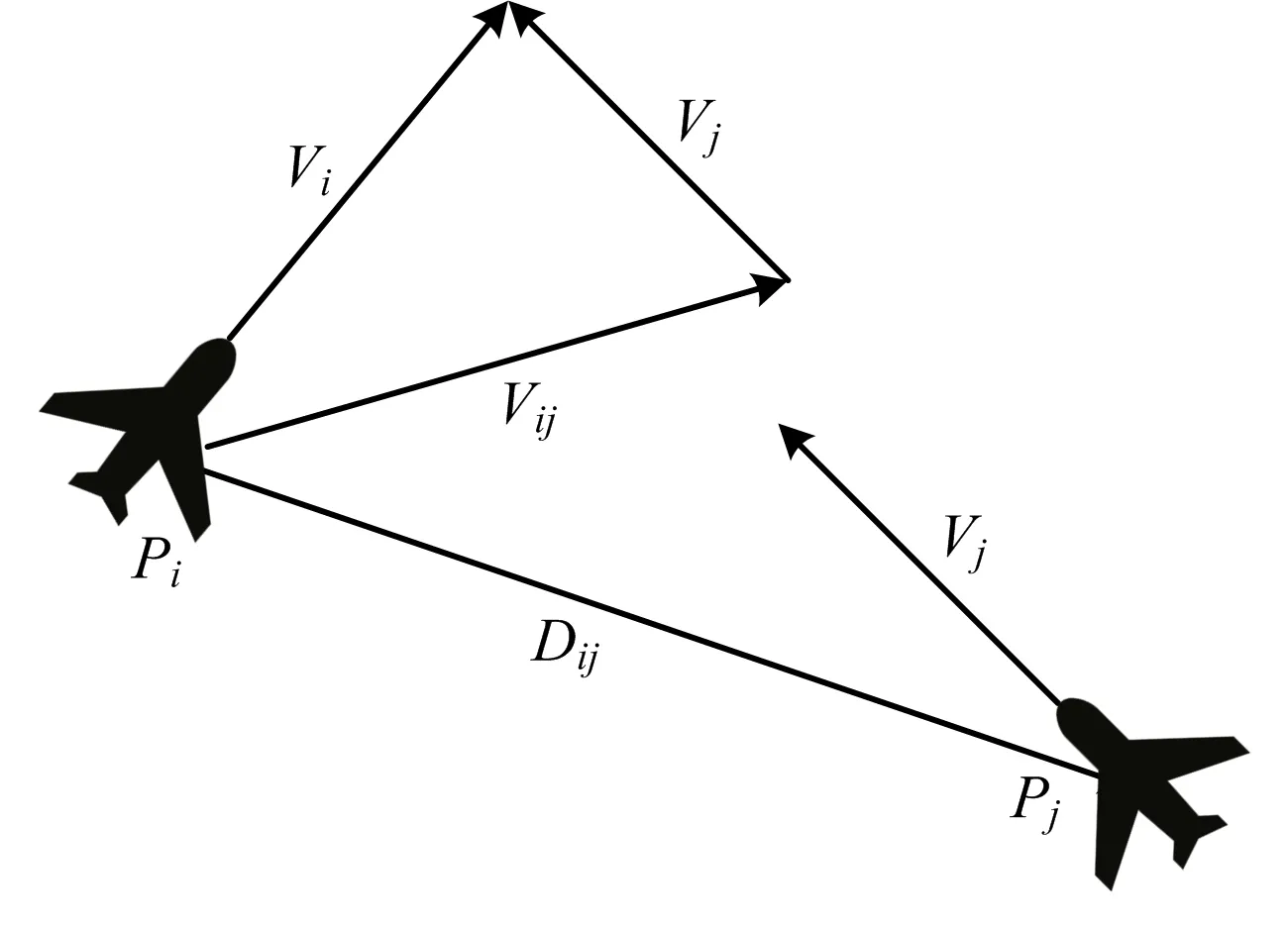
图2 活动目标相对速度Fig.2 Relative speed of moving target
Dij=Pi-Pj
(1)
Vij=Vi-Vj
(2)
则i和j的迫近率如式(3)所示:
(3)

活动目标的相对速度越大或相对距离越小,二者潜在冲突越严重,根据迫近率和相对距离,设置边权计算如式(4)所示:
(4)
式中:wij为i和j连边的权重。
2 关键冲突点识别方法
2.1 网络特征指标选取
飞行区交通态势网络主要由节点和连边构成,其中节点是对活动目标的抽象描述,连边代表活动目标之间的冲突影响关系。可见节点和网络整体的特征指标能够定量描述网络特性。本文选取以下特征指标表征飞行区交通态势网络特性:
1)度中心性(Degree Centrality,DC)
在复杂网络中,节点的度中心性反应该节点与网络中其他节点的联系程度,计算如式(5)~(6)所示:
(5)
(6)
式中:ki为活动目标i的度;dci为i的度中心性;n为网络中活动目标总数;Γi为i邻接节点的集合。
2)介数中心性(Betweenness Centrality,BC)
节点的介数中心性是指网络中经过该节点的最短路径数目占该网络中最短路径总数的比例,计算如式(7)所示:
(7)
式中:bci为活动目标i的介数中心性;∂st为节点对(s,t)之间最短路径的条数;∂st(i)为节点对(s,t)之间的最短路径经过i的条数。
3)介度熵(Betweenness and degree Entropy,BE)
节点的介度熵由结合度中心性和介数中心性定义,计算如式(8)所示:
(8)
式中:bei为活动目标i的介度熵;M为i的邻居节点集合。
4)最大连通子图(Giant Connected Component,GCC)
最大连通子图大小为其中所有节点的数量,可以反映出飞行区交通态势网络中存在潜在冲突最大区域的活动目标数量,最大连通子图的大小越大,网络中潜在冲突越大。
5)网络效率(Network Efficiency,NE)
在复杂网络中,任意节点对的效率定义为二者之间最短路径距离的倒数,计算如式(9)所示:
(9)
式中:neij为节点对(i,j)的效率;dij为活动目标i和j之间的最短路径长度,当二者之间无相连边时,dij=0。
全局网络效率表示的含义为网络中任意1个节点联系到另1个节点所需的中转次数的平均值,计算如式(10)所示:
(10)
式中:ge为全局网络效率。
在飞行区交通态势网络中,全局网络效率可以反映网络连通程度,即网络中节点之间潜在冲突复杂程度。全局网络效率越大,对飞行区活动目标之间冲突调配难度越大。
2.2 识别与检验步骤
复杂网络的关键节点在不同网络中扮演着不同角色,在本文研究飞行区交通态势网络中关键节点即关键冲突点。综合考虑度中心性和介数中心性后,节点的介度熵既可以反应出该节点在局部范围内存在潜在冲突的活动目标数量、大小,又可以反应出该节点与其存在潜在冲突的活动目标之间的冲突程度,可以较好地刻画实际运行中活动目标在局部范围内的冲突情况,故将介度熵作为活动目标的冲突指数,采用介度熵法来识别关键冲突点。算法步骤如下:
1)以活动目标为节点,潜在冲突关系为边,根据迫近率和相对距离设置边权,建立飞行区交通态势网络,得到网络加权邻接矩阵。
2)计算网络中各节点的度中心性、介数中心性,进一步计算各节点的介度熵。
3)将介度熵作为活动目标的冲突指数,按介度熵大小给所有节点排序,介度熵最大的节点即为关键冲突点。
为检验识别结果的准确性,选取最大连通子图大小和全局网络效率作为抗毁性测度指标,进行网络抗毁性分析,分别用度中心性、介数中心性、邻接信息熵和介度熵4种攻击策略攻击网络,对比不同攻击策略效果。检验步骤如下:
1)在已建立的飞行区交通态势加权网络中,计算各节点的邻接信息熵。因为采用邻接信息熵识别关键节点并非本文采用的方法,只用于对比识别效果,邻接信息熵的详细定义详见参考文献[14]。
2)分别按度中心性、介数中心性、邻接信息熵和介度熵从大到小给所有节点排序,得到排序表。
3)分别计算4种顺序下,每攻击1个节点后的最大连通子图大小和全局网络效率。
4)对比4种攻击策略的效率,让网络抗毁性测度指标值下降最快的攻击策略攻击效率最高,识别出的关键冲突点最准确。
3 实例验证
本文以西安咸阳机场某日白天正常运行的A-SMGCS(先进的场面活动引导和控制系统)监视数据为实验样本,随机选取1个时刻(T1)的监视数据,按上文中的规定处理数据后建立飞行区交通态势网络模型。
根据上文特征指标计算公式,计算各节点的特征指标,共计65个节点见表1所示,由表1中的网络节点各项指标数值分别按4个指标从高到低进行排序,见表2所示,表2中数据为表1中节点序号。
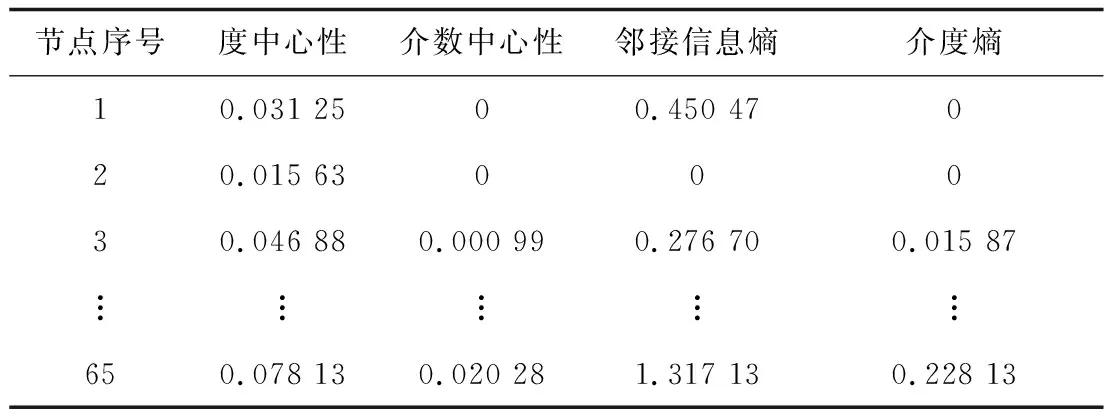
表1 时刻T1节点特征指标Table 1 Node characteristic indexesof T1
将4种排序方法作为攻击策略,按表2中4个指标从高到低顺序攻击网络中的节点,并记录最大连通子图大小和全局网络效率变化情况,如图3和图4所示。最大连通子图大小即为子图中节点的个数,全局网络效率即为网络中任意1个节点联系到另1个节点所需中转次数的平均值。
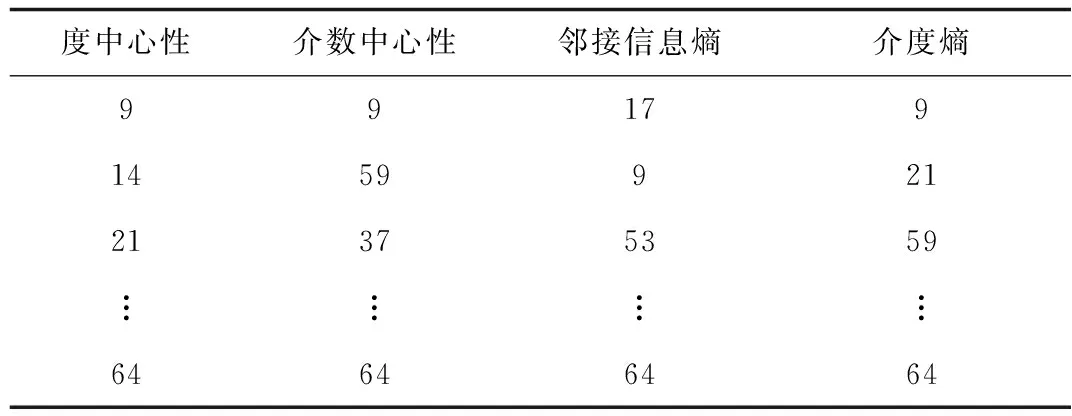
表2 时刻T1节点特征指标排序Table 2 Node characteristic indexes sorting of T1
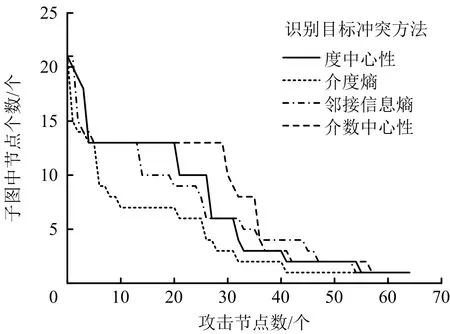
图3 最大连通子图大小对比Fig.3 Comparison of GCC size
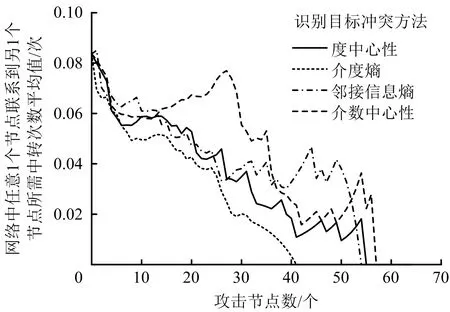
图4 全局网络效率对比Fig.4 Comparison of global network efficiency
由图3和图4的对比结果可知,在攻击节点的过程中,介度熵曲线几乎全程处于最下方。说明介度熵攻击策略相比于其他几种方法更有效,即本文使用介度熵作为活动目标的冲突指数,比用其他3种方法识别出来的关键冲突点更准确。
仅用1组数据对比存在较大偶然性,从监视数据样本中随机选取4个时刻的监视数据,分别命名为时刻T2,T3,T4,T5。在实际运行中关注冲突指数较大活动目标,攻击每个时刻网络各项节点特征指标排名前3的节点,视为管制员调配关键冲突点,对比使用不同调配方法后网络整体特征指标的变化见表3和表4所示。
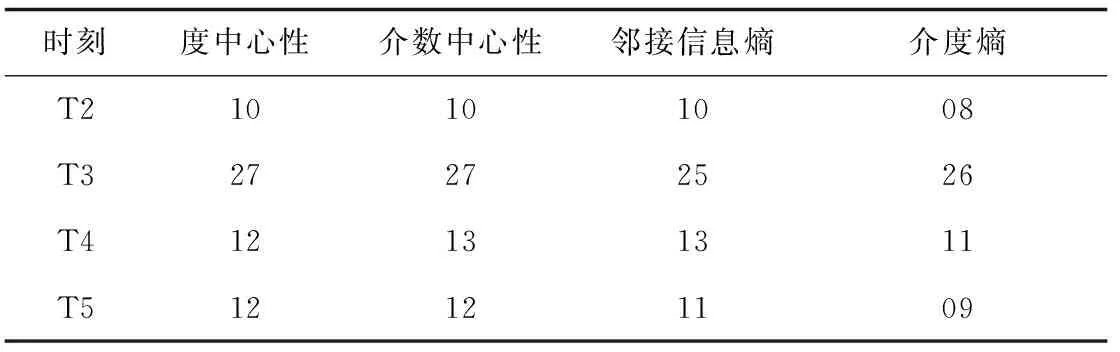
表3 4个时刻调配后的最大连通子图大小Table 3 GCC size after deployment of 4 moments
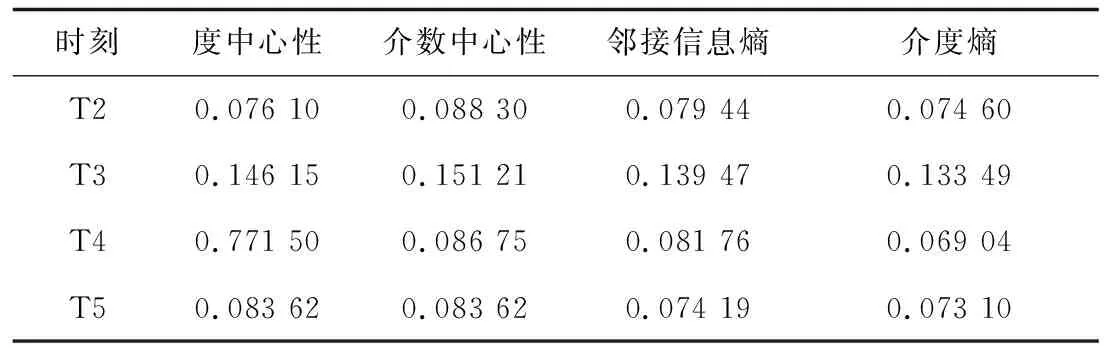
表4 4个时刻调配后的全局网络效率Table 4 Global network efficiency after deployment of 4 moments
由表3和表4对比结果可知,在攻击排名前3的节点后,4个时刻的网络中仅有时刻T3网络中邻接信息熵法的最大连通子图大小比介度熵法小,其余情况下,相比于其他方法采用介度熵法使网络整体特征指标值下降得最多,即介度熵法为最优,这与时刻T1的对比结果一致,进一步证明介度熵法识别关键冲突点具有一定准确性。
为了更直观地体现关键冲突点的识别效果,对4个时刻冲突指数排名前3的活动目标调配前后的局部飞行区交通态势网络对比,如图5所示。
图5(a),图5(c),图5(e),图5(g)分别为时刻T2,T3,T4,T5的局部飞行区交通态势网络结构,图5(b),图5(d),图5(f),图5(h)则是对冲突指数排名前3的活动目标调配后,时刻T2,T3,T4,T5对应的网络结构,航空器A与车辆B、车辆C、车辆D分别是每个网络的关键冲突点。由图5(a)可知,T2时刻中的航空器A与4架车辆和1架航空器存在潜在冲突。其余时刻中的车辆B、车辆C、车辆D均与附近多个活动目标存在潜在冲突,应重点关注关键冲突点状况,避免与周围的活动目标发生冲突甚至相撞。调配冲突指数排名前3的活动目标后,T2时刻中网络被切成2个,T3,T4,T5时刻中网络连边数量明显减少。
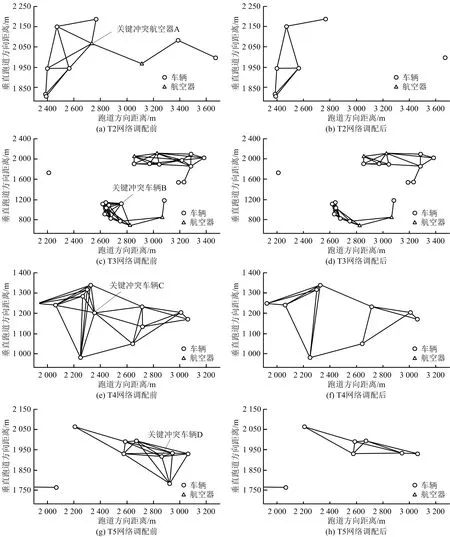
图5 T2~T5时刻调配前后网络结构对比Fig.5 Comparison of network structure before and after deployment of T2~T5 moments
无论从网络整体特征指标的变化来看,还是从调配关键冲突点前后的对比图来看,调配通过介度熵法识别出关键冲突点后网络复杂程度明显下降。
4 结论
1)飞行区交通态势网络建模方法,既可以刻画单个活动目标特征,又可以刻画整个飞行区内活动目标总体特征;既可以应用于航空器之间的冲突分析,还可以应用于航空器与车辆、车辆与车辆之间的冲突分析。
2)在飞行区交通态势网络中,识别飞行区关键冲突点时,介度熵比介数中心性、度中心性和邻接信息熵方法更有效。
3)通过介度熵的关键冲突点识别方法调配识别活动目标,飞行区交通环境复杂度明显下降,能降低活动目标发生碰撞的概率,一定程度上可以提高飞行区安全运行水平。
