基于AIS数据的民船行为预测与区域告警方法研究
2022-10-17唐艺灵
唐艺灵
(中国人民解放军92941部队,辽宁 葫芦岛 125001)
随着武器装备作战性能的不断提高,与其相关的试验范围不断扩大,对试验安全保障要求不断提高。同时,伴随地方经济的发展和人民生活的需求,海区的船舶运输、渔业生产等海上活动也日益繁忙,军地双方对海区使用的矛盾越来越突出。
目前,民船上强制配备了AIS船舶自动识别系统,该系统向岸基及周边船舶发送自身的静态、动态和航次数据,可实时监测和记录9万平方千米海域内装备AIS船舶的数据。靶场设置了AIS信息接收站,收集了丰富的区域内海上情报数据,但是仅限于实时海情保障,没有二次利用和分析挖掘。基于海上轨迹数据的船舶异常行为识别研究的传统方法是建立统计模型,文献[4]分析了针对海量轨迹数据的处理方法,并利用地理网格技术划分港口水域,通过对每个单元进行统计分析来揭示船舶航行规律,从时空多维角度分析船舶属性信息,其定义的关联规则较为简单,并未通过实测数据进行相关验证。文献[5]中利用最小二乘法对船舶航迹进行了曲线拟合,通过计算监控船舶轨迹点与典型轨迹间距离是否大于典型轨迹95%置信区间范围来识别轨迹异常船舶,对进出港船舶轨迹考虑较为理想,然而,拟合曲线针对变航向航迹、机动性较强的航迹拟合效果较差。文献[6]采用基于DBScan聚类算法构建船舶轨迹模型,并在相似度度量时融入了位置信息与航向信息两个轨迹结构特征,最终能够有效地计算船舶会遇密集区,得到密集海上交通流的特征区域。随着时间的增大,AIS数据量呈现线性增长,因此,该方法的聚类效率有待进一步提高。
综上所述,当前针对海上船只交通行为异常检测多注重仿真,主要应用于码头、港口船只的交通协调。本文基于靶场海域的情报保障和指挥需求提出了基于AIS的民船行为预测与区域告警方法,将船舶位置、航向等信息,进行船舶聚集和航迹分析,依据试验区域范围,统计和过滤对划定禁区具有威胁的船只活动,实现对船舶异常行为的识别,构建船舶行为的识别模型。
1 民船行为预测与区域告警方法
采集的民船AIS数据包含船舶的经纬度位置信息、航向信息和速度信息。然而,根据这些信息无法判断该船当前行为是否异常,也无法对其行为进行预测,不能进行区域预警。本文利用民船AIS历史数据,对航迹、距离、朝向、航速分别进行聚类分析,得到相应不同的等级,进而根据船舶异常行为判断模型计算民船当前位置异常值、运动趋势异常值,然后,依据计算矩阵得到民船当前运动趋势异常等级,最后,结合航迹点归属等级以及当前运动趋势异常等级,利用当前行为异常等级划分原则进行判断,进而实现民船当前行为异常告警,辅助指挥员决策,具体方法流程见图1。
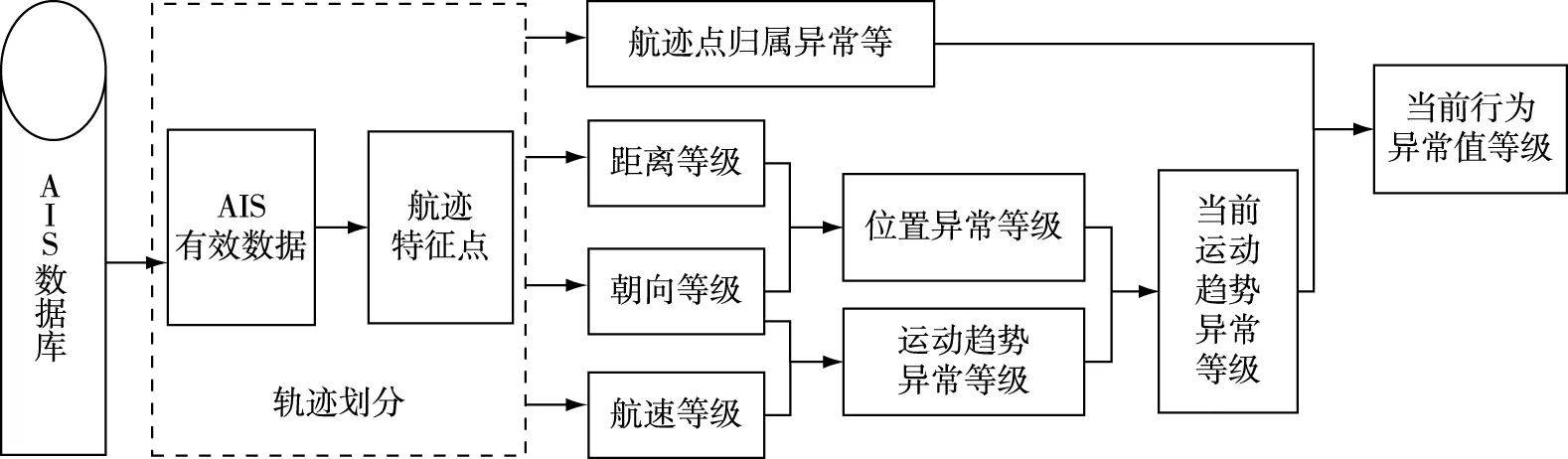
图1 基于AIS的民船行为预测与区域告警方法流程
基于AIS的民船行为预测与区域告警方法,具体步骤如下:
步骤1.对历史的AIS航迹信息进行整编处理,存入数据库航迹库表;
步骤2.采用轨迹分段划分方法,得到航迹特征点集;
步骤3.计算航迹点归属异常等级;
步骤4.计算选定的AIS目标距离禁区的最短距离,根据距离,得到距离等级;
步骤5.判断选定的AIS目标的航向是否朝向禁区,根据朝向,得到朝向等级;
步骤6.根据选定的AIS目标的航速,得到航速等级;
步骤7.根据位置异常值计算模型,采用计算矩阵得到位置异常值,进而通过等级划分得到位置异常等级;
步骤8.根据运动趋势异常值计算模型,采用计算矩阵,得到运动趋势异常值,进而通过等级划分得到运动趋势异常等级;
步骤9.根据当前运动异常值计算模型,采用计算矩阵,得到当前运动异常值,进而通过等级划分得到当前运动异常等级;
步骤10.根据当前行为异常值计算模型,采用计算矩阵,得到当前行为异常值,进而通过等级划分得到当前行为异常等级。
2 航迹特征点集计算方法
船舶动态信息通常2~180 s广播一次,AIS数据量庞大,从全部数据中找到航行特征需要的时间和空间开销都很大,容易造成一些相似的轨迹子段信息丢失等问题,判断民船行为的实时性要求很高,因此,本文采用海区船舶AIS轨迹数据的分段划分方法,将采集的航速和航速变化率等轨迹子段作为研究对象,将各子段的特征综合得到整条轨迹的特征较为完整的描述,这样既保留了船舶轨迹航行的原始特征(保持原有轨迹的精确性),又有效降维处理了AIS的数据。对轨迹的分段划分有以下步骤。
步骤1.设定阈值;
步骤2.特征点候选集初始化,特征点候选集={起点 终点};
步骤3.根据式(1)、(2),计算AIS采集的每个点的航向或航速变化率;

(1)

(2)
步骤4.特征点候选集扩充,特征点候选集={起点 终点 轨迹点>阈值}。
轨迹划分的关键是特征点的选取,特征点要尽量描述轨迹的变化,本文用航向或航速的变化率和阈值比较,来判断特征点。
步骤1中设定的阈值大小要合适,阈值过小,轨迹重要细节特征点会被排除掉,阈值过大,会将轨迹的突变或由采样导致的异常包含进来。
下面以AIS采集到的船舶~数据来分析轨迹分段划分方法。图2中,点、、、、、、和为AIS采集到的船舶航向和航速数据,用实线连接起来得到船舶的原始航迹。在~中选取特征点,要求将所有的航向变化率、航速变化率大于某一阈值的点选为特征点。若将八个位置点都作为特征点,则轨迹原始特征保留情况最好,但是计算过程耗时也最长。若特征点候选集={,,},{,,},{,,}等三个特征点候选点集,虽然点集数量减少,但是没有准确刻画船舶原始轨迹的特征。按照轨迹的分片划分方法步骤,首先将特征点候选集初始化,特征点候选集={,},接着按照式(1)和式(2)计算、、、、、的航向和航速变化率,根据历史数据得到该民船的航向和航速变化率,设置阈值,判断是否是特征点。计算得到特征点候选集={,,,,},显然,得到的轨迹划分基本描述了该民船的原始轨迹。

图2 海区船舶AIS轨迹数据的分段划分示意图
3 航迹点归属等级计算
本文采用DBScan方法对民船目标的AIS历史数据进行分析,得出航迹点归属等级。选定一批当前AIS目标,根据该目标的海上移动识别码MMSI在数据库的航迹库表中检索出历史航线航迹点,采用DBScan聚类算法计算密集多边形区域,通过设置不同的扫描半径和最小包含对象数,计算出核心区域集、重要区域集、一般区域集三类区域集合,然后判断当前航迹点的位置归属,计算航迹点归属异常等级。具体方法是:
首先设置基础扫描半径和最小包含对象数;
当扫描半径为,最小包含对象数为时,扫描得到的是一般区域集;
当扫描半径为,最小包含对象数为2时,扫描得到的是重要区域集;
当扫描半径为/2,最小包含对象数为2时,扫描得到的是核心区域集;
再判断当前航迹点的位置归属,计算航迹点归属异常等级;
如果<,则=1;
如果<,则=2;
如果<,则=3;
不满足上述三个条件,则=4。
4 船舶目标距离、朝向和航速等级评价准则
在对船舶目标进行航迹点归属等级计算的同时,建立AIS目标与目标区域间距离、朝向和航速的评价准则和等级赋值。
4.1 距离等级评价准则
计算选定的AIS目标与禁区的最短距离,根据距离,采用DBScan方法设置扫描半径为100 n mile,距离等级赋5个数值,生成距离等级的评价准则如表1。

表1 距离等级赋值表
4.2 朝向等级评价准则
判断选定的AIS目标的航向是否朝向禁区,根据朝向,生成朝向等级的评价准则如表2。
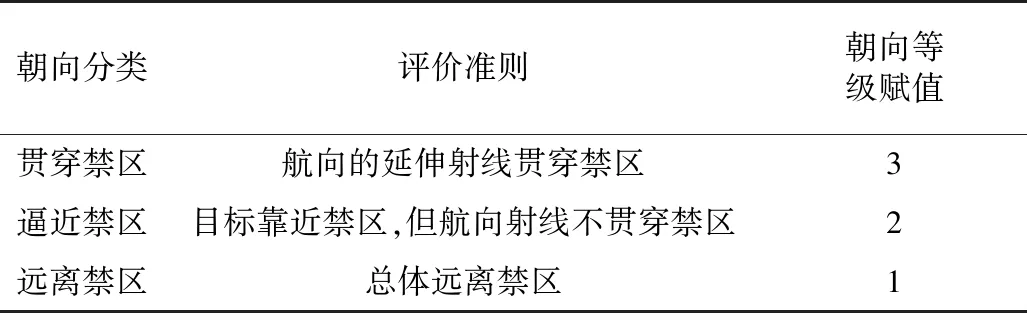
表2 朝向等级赋值表
4.3 航速等级评价准则
根据选定的AIS目标的航速,生成航速等级的评价准则如表3。
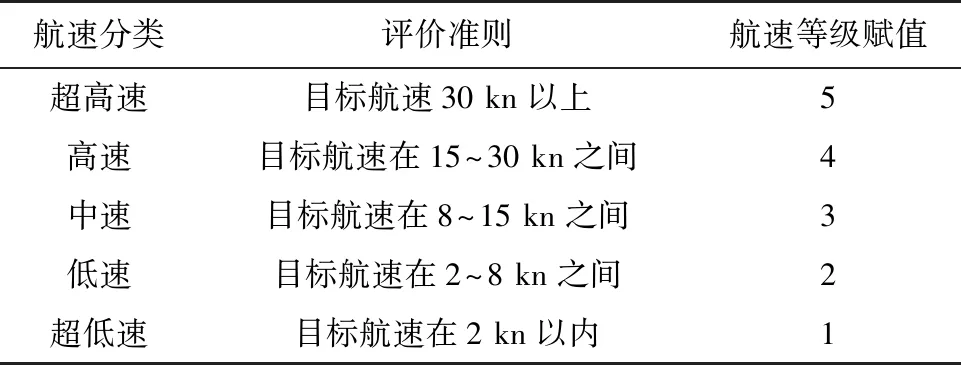
表3 航速等级赋值表航速分类
5 船舶异常行为判断模型
5.1 位置异常等级划分原则
位置异常评判与朝向等级和位置等级相关,采用计算矩阵得到位置异常值,其中,计算矩阵见表4。

表4 位置异常值计算矩阵
根据计算得到不同的位置异常值,采用等级划分法得到位置异常等级,划分原则如表5。

表5 位置异常等级划分原则
5.2 运动趋势异常值划分原则
运动趋势异常判断与航速等级和朝向等级相关,采用计算矩阵得到运动趋势异常值,其中,计算矩阵见表6。
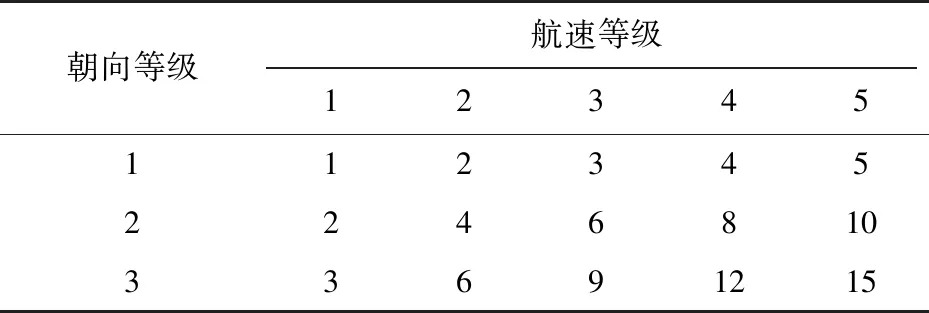
表6 运动趋势异常值计算矩阵
根据计算得到不同的运动趋势异常值,采用等级划分法得到运动趋势异常等级,划分原则见表7。
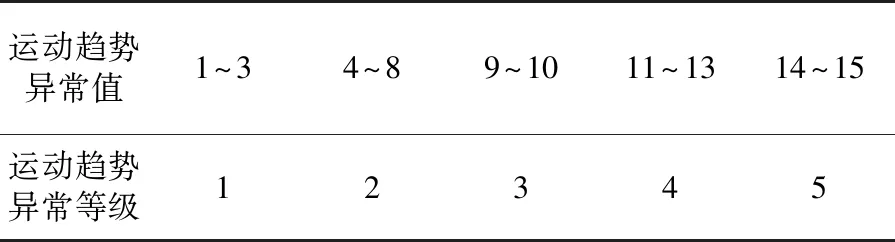
表7 运动趋势异常等级划分原则
5.3 当前运动异常等级划分原则
当前运动异常与位置异常等级和运动趋势异常相关,采用计算矩阵得到当前运动异常值,其中,计算矩阵见表8。

表8 当前运动异常值计算矩阵
根据计算得到不同的运动趋势异常值,采用等级划分法得到当前运动异常等级,划分原则见表9。
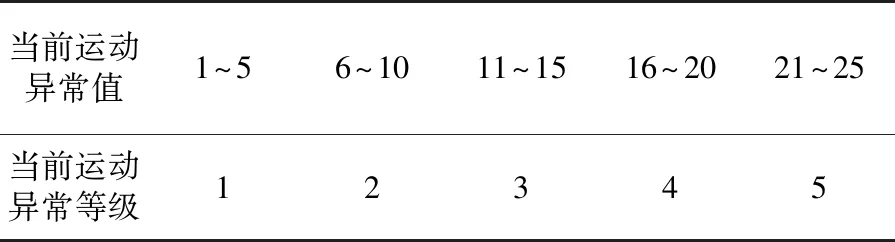
表9 当前运动异常等级划分原则
5.4 当前行为异常等级划分原则
当前行为异常与归属异常等级和当前运动异常等级相关,采用计算矩阵得到当前行为异常值,其中,计算矩阵见表10。
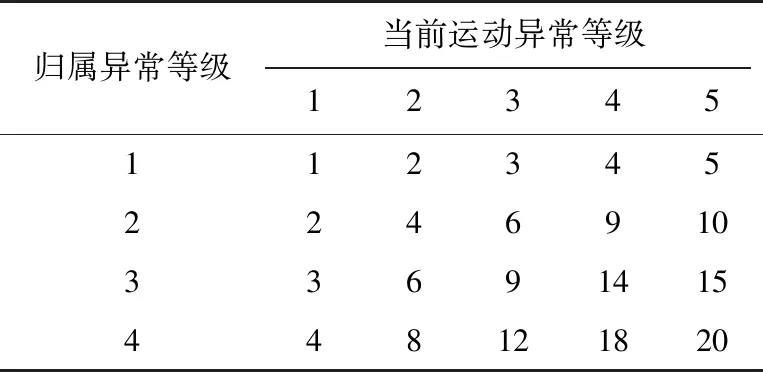
表10 当前行为异常值计算矩阵
根据计算得到不同的当前行为异常值,采用等级划分法得到当前行为异常等级,划分原则见表11。

表11 当前行为异常等级划分原则
6 软件验证与应用
通过对目标区域内AIS信息进行整理,结合民用船只数据,通过对海量的历史数据挖掘分析,研究基于历史数据分析挖掘的综合统计模型等数据产品,设计海面目标数据分析预报演示软件,通过海量数据分析预测民用船只分布规律及活动特点。
样机软件由数据快速访问、数据分析处理、数据分析显示三部分组成,具体软件信息流程如图3所示。其中,数据快速访问软件完成各库的数据清洗后,利用目标数据索引实现不同数据库的关联整合,形成逻辑的数据分析基础库,为内部各数据分析功能软件提供快速访问服务。数据分析处理软件定时或人工触发地利用数据快速访问软件获取待分析数据,在分析处理后将中间结果存入数据分析结果库,其中,民船航迹点归属等级计算、距离、朝向和航速的等级赋值以及船舶异常行为判断均在此部分软件完成。数据分析显示软件向数据分析处理软件发出数据分析命令后,数据分析软件从数据分析结果库中获取满足条件的中间结果,统计分析后向数据分析显示软件反馈数据分析结果。

图3 海面目标数据分析预报演示软件内部信息关系图
通过对船舶AIS数据的统计分析,采用多源信息融合算法,整编形成给定时间段、目标区域周边海面目标综合航迹,计算识别异常靠近或进入目标区域的船舶行为,按照异常行为次数、时间、轨迹等因素形成目标威胁级别,详见图4。

图4 船舶行为异常分析结果示意图
7 结束语
本文利用历年积累的海面目标监测数据开展挖掘分析,将海区船舶AIS轨迹数据分段划分,采用DBScan聚类分析法对民船的AIS历史数据进行分析,得出航迹点归属等级,根据民船与试验区域的距离、朝向、航速,并结合航迹点归属等级,通过制定一系列评价准则和计算模型,对体现民船可能行为的各类因素进行量化和计算,最终得到民船当前行为的异常值与对目标区域的威胁等级,为采取必要的防范措施提供决策支持。