水下无人系统集群感知与协同技术发展
2022-10-17梁世龙
韦 韬,朱 遴,梁世龙
(中国人民解放军92228部队,北京 100072)
近年来,随着人工智能、无线通信以及智能控制等技术的快速发展及其在军事方面的广泛应用,水下无人系统(Underwater Unmanned System,UUS)已成为世界各国竞相发展的重要装备,正在深刻改变战争面貌。同时,单体智能化水平的提高,也为无人系统集群的发展提供了有利条件。水下无人系统集群(Underwater Unmanned System Swarm,UUSS),作为一种新的装备形态,发展快速,但存在许多亟待攻克的技术难题。
本文以水下无人系统集群为研究对象,通过回顾其国内外发展历程,指出我国现阶段研发的紧迫性和可行性。然后,围绕集群的信息获取和处理,对水下环境感知技术(如声学感知、光学感知)和水下协同技术(如协同通信、协同控制、协同定位与导航技术)进行详细论述,系统性地对水下无人系统集群关键技术进行梳理。最后,针对水下特定环境带来的技术挑战,给出了水下无人系统集群可能的研究方向,为其在军事作战领域的应用提供技术参考。
1 水下无人系统国内外发展现状
1.1 水下无人系统发展现状
水下无人系统具有自主性、隐蔽性、环境适应性、可部署性和高效费比等优点,可广泛应用于水下警戒、侦察、监视、跟踪等军事任务及水文测量、海洋学研究等科考任务,具有重要的实战意义和研究价值。
美国长期致力于水下无人化、智能化、新概念装备等方面的研究,拥有从微型到超大型种类多样的水下无人系统,且其功能逐渐向能够实现水下攻击、水雷战、情/监/侦等综合任务的智能一体化趋势发展。俄罗斯研制出多款具有综合性强、作战任务广等优势的水下无人系统。其中,Poseidon战略级核动力水下无人系统具有优良的核打击能力。英国、法国、新加坡等国也积极开展智能化水下无人系统的研制。近年来,我国水下无人系统的研制取得了显著成果,研制出以“海斗一号”为代表的多款用于深海探测的无人系统。整体上,现有单体水下无人系统具备较高的自主性和智能化,代表性水下无人系统如表1所示。

表1 国内外代表性水下无人系统
1.2 水下无人系统集群发展现状
水下无人系统集群由多个具有一定自主决策能力、彼此之间存在指挥控制和通信关系,且共同承担给定任务的水下无人系统组成。利用单体间的协同优势,集群可综合多源信息,扩大感知范围,完成更复杂的任务,实现由单体智能向群体智能的跨越。
美国开展了以“持续濒海水下监控网络项目(PLUSNet)”和“协作自主的分布式侦察与探测系统(CADRE)等为代表的水下无人系统集群研究与测试,以完备美军的水下信息网络功能。SwarmDiver水下无人系统集群可支持多达100台SwarmDiver同时作业,主要用于侦察、反水雷及创造安全边界等。欧盟2011年设立“集体认知机器人(CoCoRo)”项目,依赖多个单体机器人及其搭载的各类传感器,实现水下监测和搜索。目前,我国针对水下无人系统集群的研究多集中于关键技术,水下无人系统集群的实践研究报道较少。相关集群信息如表2所示。
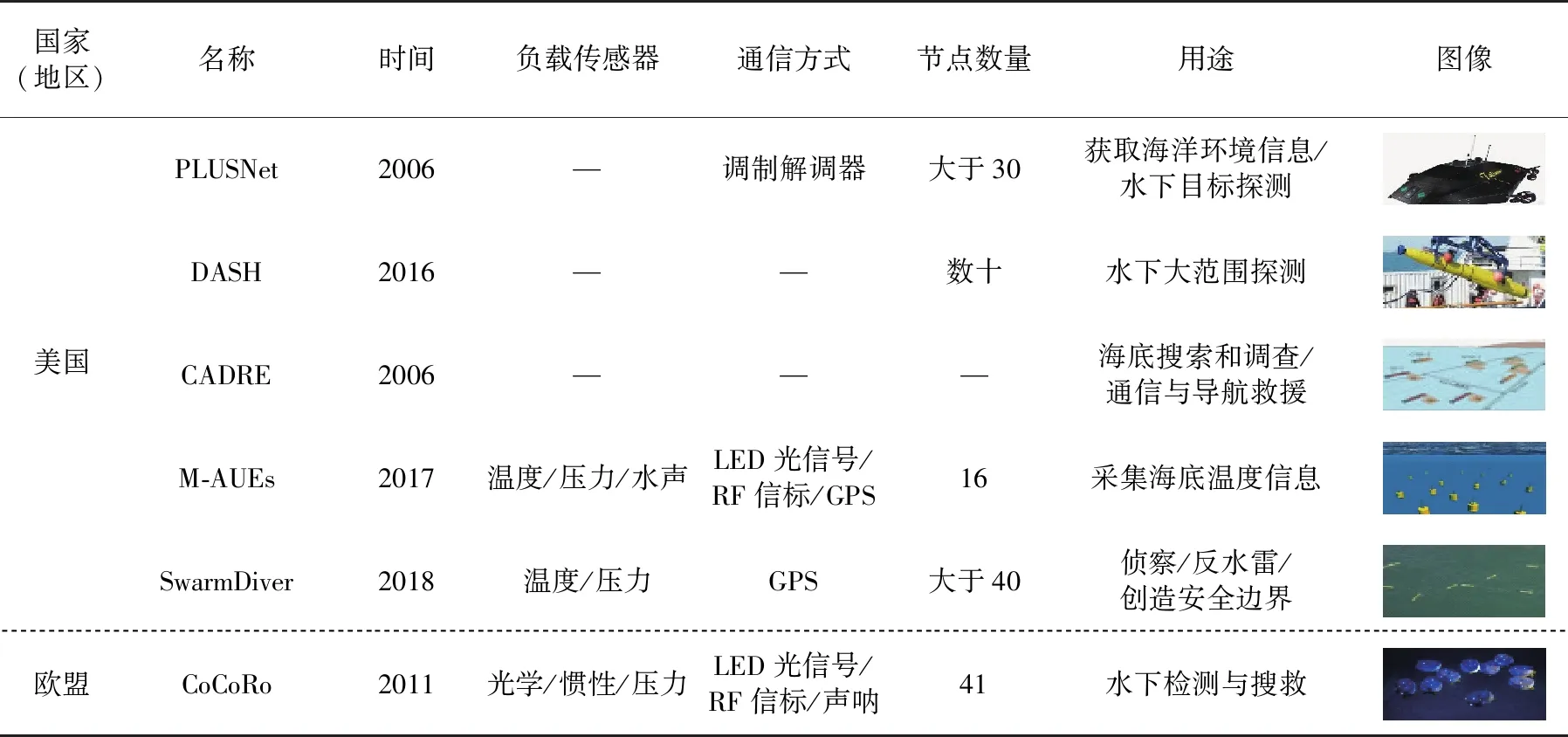
表2 国外水下无人系统集群
我国对水下无人系统的研制起步较晚,特别是在军事应用方面,与国外还有较大的差距,亟须加强水下无人系统集群的研究,提升水下防御和攻击能力。现阶段,我国在单体无人系统方面取得的成果为军事水下无人系统的研制积累了丰富的经验。同时,人工智能、大数据、无线通信、自动控制等关键技术的飞速发展与广泛应用,为我国水下无人系统集群的协同操作提供了可行的技术支撑。另外,我国在无人机集群协同方面开展了广泛的研究,并积累了大量的技术储备,可为水下无人系统集群研究提供技术借鉴。
2 水下环境感知技术
根据传感设备的不同,水下环境感知主要分为水下环境声学感知和水下环境光学感知。其中,声学感知利用声呐图像(由声呐成像设备生成)实现水下远距离目标的定位与探测;光学感知利用水下RGB图像(由水下相机生成)实现水下近距离目标的检测与定位。自主的环境感知能力是水下无人系统实现智能化的基础。
2.1 水下环境声学感知方法
水下声学环境感知以声呐为传感设备,利用声波在水下的传播和反射特性,通过声呐接收与成像设备,对声波信号进行电声转换与信息处理,进而获取声呐图像和探测数据,以实现水下目标检测、海底地形探测等目的。
水下声学目标感知分为传统的声学图像目标检测和基于深度学习的声学图像目标检测。传统的声学图像目标检测因其使用手工设计特征,而无法实现高层决策,并且存在光照要求高,受噪声干扰严重,鲁棒性不足和泛化性较差等问题;而基于深度学习的声呐图像目标检测具有计算量小,检测速率快,实时性高等优势,是目前的主流研究思路。王非等融合声呐图像的纹理特征和深度图的空间几何特征,通过YOLOv3(You Only Look Once,YOLO)模型实现水下目标物体检测。李宝奇等利用可扩张、可选择卷积核模块提取、融合声呐图像的多尺度特征,通过改进SSD(Single Shot Detection)模型的特征表达能力来实现水下目标检测,图1展示了该方法对声学图像的目标感知结果。

图1 水下声学目标感知:圆柱形目标(左)和电缆(右)[7]
此外,受水下环境和设备自身特性影响,声学图像存在噪声干扰大,分辨率低,图像模糊等严重退化问题。研究者开展了声学图像的降噪算法,以提高图像的可视化质量。近期的研究主要包括基于噪声参数估计、基于R-CNN网络和基于生成对抗网络等方法。图2展示了使用噪声参数估计方法去噪前后的声学图像。

图2 原始水下声学图像(左)与去噪后图像(右)[8]
2.2 水下环境光学感知方法
水下光学图像目标感知是在水下光学图像中,检测或识别出感兴趣目标,并确定其所在位置。由于水下环境复杂多变,且水体吸收光线,水下光学图像成像存在颜色偏移、失真以及对比度低等问题,导致水下光学图像目标感知精度难以满足应用需求。针对这一问题,近期的研究主要围绕基于深度学习的方法开展。
李庆忠等提出了基于YOLO模型的水下鱼群检测。黄廷辉等提出了基于FAttention-YOLOv5的水下目标检测算法。考虑SSD模型能较好地兼顾检测精度和检测速度,强伟等提出一种基于改进SSD的目标检测算法,提高了水下复杂环境下目标检测的准确率和实时性。李宝奇等利用轻量化、卷积核可变形、通道可选择的特征提取模块改进SSD框架,实现水下光学图像感兴趣目标的检测与识别。Islam等结合Faster R-CNN、YOLOv2以及SSD模型,将训练好的模型部署到水下无人系统,实现潜水员检测、自主跟随等功能。图3给出了水下光学图像目标感知示例。

图3 原始水下光学图像(左)与水下目标感知结果(右)
此外,为了生成满足人眼视觉感知效果的水下图像,研究者从对比度、清晰度和颜色等方面对获取的水下光学图像进行增强。最初,利用简单的卷积神经网络(Convolutional Neural Networks,CNN)优化模糊图像和清晰图像之间的残差,训练端到端的图像增强模型;后来发展为构建具有颜色校正网络和去雾网络两分支的UIE-Net模型,构建能够保留原始结构和纹理细节、重建清晰水下光学图像的UWCNN模型;进一步,提出嵌入非局部注意机制和通道注意机制的残差双层注意网络RTFAN来消除色偏和噪声。随着CNN在水下光学图像增强领域的持续发展,水下图像数据匮乏等问题逐渐凸显。研究者利用生成对抗网络(Generative Adversarial Networks,GAN)开展无监督的水下图像增强方法研究,减少对数据的依赖性。Li等提出一种实时的水下图像颜色校正模型WaterGAN。李庆忠等和Zong等基于改进的CycleGAN实现水下图像的颜色校正与增强。图4给出了增强前后的水下图像。

图4 原始水下光学图像(左)与增强后图像(右)
2.3 水下环境协同感知方法
单一水下无人系统传感资源有限,而水下环境复杂,态势多变。为扩大环境态势感知范围,提高目标探测精度,增强目标感知的抗干扰能力,水下无人系统集群的协同感知具有重要的实战意义。
在无人系统集群协同感知方面,美国的“班组X实验”(Squad X)项目通过集成传感技术、无人系统(无人机、无人车等)以及智能算法等,组建以人工智能协助的作战部队,提高小型作战单元对威胁的感知与响应能力,验证了无人集群协同感知在作战中的实际军事意义。然而,对于水下无人系统集群协同环境感知方面的研究,特别是针对水下无人系统获取的高维信息(声学、光学信息)的协同感知,目前相关的报道有限,而这方面的研究对于水下态势感知具有重要作用。
3 水下协同技术
水下无人系统集群由具备自主决策,能够相互通信且存在指挥控制关系的群组构建而成,通过利用水下协同通信、控制、定位与导航技术可以实现水下各种协同任务。
3.1 协同通信技术
水下常用的通信技术为水声通信和光通信。水声通信以声波为载体,在海水中衰减较小,已成功应用于国外多种水下无人系统。然而,声学通信面临小带宽、低数据率、高延迟以及环境噪声等诸多挑战,直接影响通信的效率,导致协作任务中的通信周期变长。
为提高水下通信效率,光通信受到越来越多的关注,具有代表性的激光潜艇通信,具有高比特率、高安全性、宽带宽等优点,其发出的蓝绿光(波长为470~580 nm)穿透水效果好,能量衰减小。因此,研究人员探索了基于蓝绿光的光通信系统,以确保水下无人系统在任何深度均能接收信息。此外,相关研究表明,尽管红色激光器能够实现水下物体和空间平台之间的光通信效果,但是,红光系统衰减的性能明显低于蓝光系统。
水下多无人系统间的协同通信通过复杂的水下无线通信网络实现,图5展示了一个水下无线通信网络的应用场景。其中,成员节点(Member Nodes)和锚定节点(Anchored Nodes)用于辅助水下无人系统采集海底的信息;聚集头节点(Cluster Head)用于聚合成员节点或锚定节点采集的信息与水下无人系统发送的信息;中继节点(Relay Node/Tethered Relay Node)则用来扩大无人系统间的通信距离。对于两个自主水下无人系统间的通信,一个无人系统发送的信息,首先通过聚合头节点与收集的地面信息聚合,再将聚合后的信息以声学或光磁链路方式,通过中继节点实现远距离转发,将转发后的信息通过一个sink站点发送给与sink站点连接的另一个水下无人系统,实现系统间的通信。

图5 水下无线通信网络场景[25]
为提高水下通信网络系统的性能,王冠群等提出基于分布式融合的水下传感器网络部署策略。该方法将网络节点进行空间划分,通过寻找空间区域内的最小拓扑结构中节点间的最优距离,来提高水下通信网络的传输效率。为了保证水下信息传输的正确性,杨丽等利用位置误差和通信网络的协同定位原理,提出一种抗干扰的水下无人系统通信网络。为了解决水下协同通信时信息传输的网络能耗问题,陈露等采用分层式的网络架构,通过对网络的分层操作来合理均衡网络能耗。此外,该方法还提出一种基于协作通信的网络优化协议,以更好地保证水下链路质量。
3.2 协同控制技术
水下无人系统集群需要协同控制技术来完成对集群内各单体系统的整体控制。常用的协同控制技术有一致性控制、蜂拥控制和编队控制。
在集群分布式控制中,一致性控制算法被提出得较早。一致性是指水下无人系统集群根据通信网络或感知系统相互交流,使得各个水下无人系统在时间上趋于一致性。Jamshidi 等人通过研究水下无人系统试验台的开发、自组网和基于网络控制的协议的实现以及一致性协同控制的共识控制算法,来促进协同控制的发展。Shoja等人针对多无人系统间非线性运动的控制,设计一种基于估计的一致性控制方案,可同时控制多个无人系统。Gallehdari等人利用无人系统间周围邻居系统的相对位置信息,实现多无人系统间信息的一致性控制。
蜂拥控制是指由许多单体组成群体来实现共同目标的控制算法,与一致性算法相比,基于蜂拥算法的集群系统结构并不一定是一种固定拓扑,它的结构在运动过程中可能会发生变化。Moshtagh等基于图论知识,提出利用最短距离控制来最小化相对势能,实现水下航行器间的速度匹配和聚集效果。Martin 等认为智能水下无人系统间存在通信半径,并且集群内各水下无人系统的通信半径随机,在选择合适的初始速度误差后,集群间可以最终实现蜂拥。
编队控制是学术界的研究热点。目前,编队控制正从集中控制向分布式控制发展。集中式方法依赖于无人系统与中心节点之间的有效通信,而分布式方法更注重无人系统集群之间的相互自主协调,具有分散、自动化和自主等特点。Zhong等提出了一种分布式控制策略,使水下多无人系统以预先设计的方向到达目标平面,以规定的半径围绕目标进行循环,避免多主体之间的碰撞。为了更好地维护和控制水下无人航行器,董权威等提出了一种基于控制器局域网络总线的分布式控制系统,将水下无人系统的功能分布到不同的节点,对每个节点实现局部控制,再利用分布式控制协议将局部控制转化为对整个系统的全局控制,具有良好的实时性和可扩展性。吴淼等针对多无人系统编队控制的动态控制问题,提出一种基于强化学习的分布式控制算法,实现了水下无人系统运动轨迹的精确控制,提高了编队系统的学习能力。
一致性控制算法、蜂拥控制算法、编队控制算法均可用于实现水下无人系统集群的协同控制。一致性算法用边表示通信,其优点是可用图表示任意队形,理论较为成熟,针对的是水下集群中存在的时间延迟问题。蜂拥控制算法解决的是水下集群执行任务中的避障问题。编队控制算法因为其队形控制可以更简单地与实物系统相结合,所以往往解决的是工程问题,如避障、信息估计等。
3.3 协同导航与定位技术
高精度水下导航与定位技术对水下无人系统集群实现诸多复杂任务(如海底地形地貌勘探、情报收集、沿岸反潜、水雷探测等)十分重要。然而,现有水下导航与定位技术受传感器质量、体积以及水声介质等因素的影响,仍然是一项具有挑战性的难题。
目前,仅依靠单个水下无人系统的导航定位很难完成大范围、多目标感知的水下任务。多水下无人系统的协同导航与定位可以提高整个任务系统的智能化水平和效率,有效提高单个导航系统的导航精度,降低误差,完成单无人系统难以完成的任务。
水下无人系统协同导航定位技术主要分为并行式(如图6左图所示)和主从式(如图6右图所示)。并行式协同导航定位是指无人系统集群中每个无人系统具有相同的结构和功能,利用各自的导航系统进行定位,通过水声通信技术获取其他系统的位置信息。主从式(也称领航式)协同导航定位是指无人系统集群包含少量领航无人系统和大量跟随无人系统。其中,领航系统装备高精度惯性导航设备、水声通信设备、全球定位系统等;跟随系统通过获得与领航系统的位置关系提高自身导航精度,通过水声通信技术在系统中确定自身位置。主从式协同导航定位有效地平衡了导航精度和设备成本,成为多水下无人系统协同导航与定位的主要研究方向。
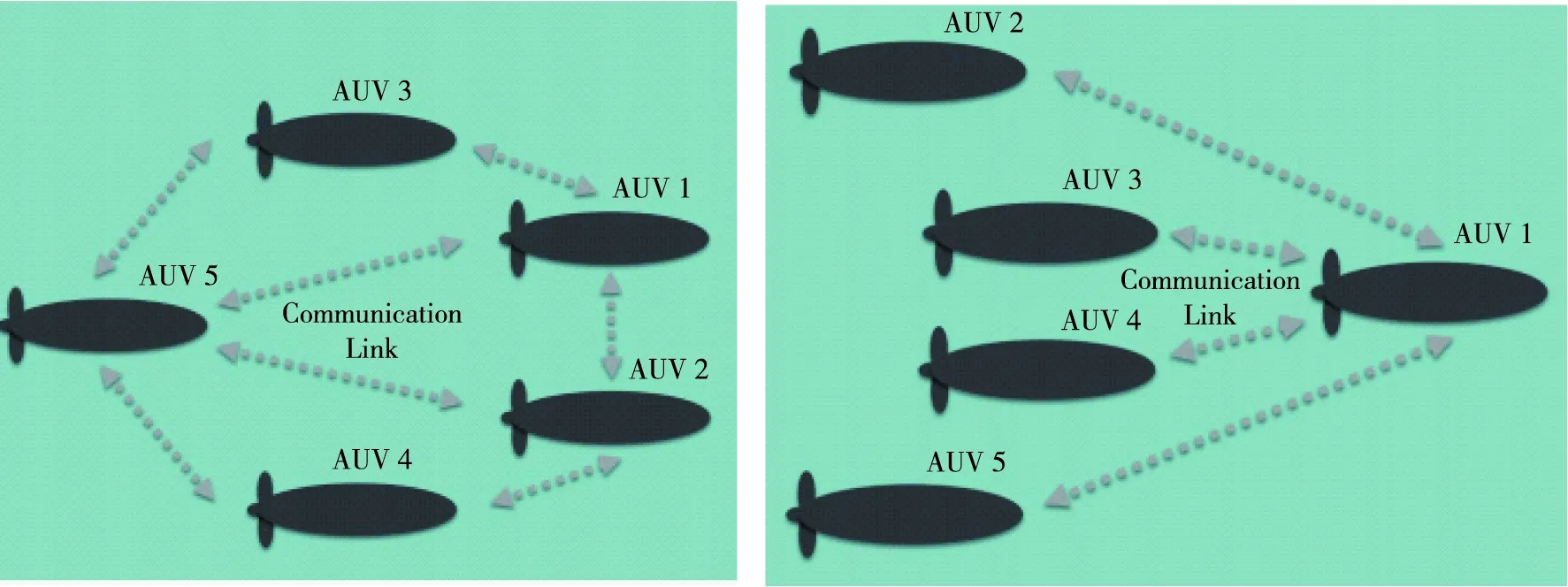
图6 并行式(左)和主从式(右)协同方式[37]
Allotta等提出了一种主从式多水下无人系统的协同导航算法,该算法利用传统的四面体配置的几何方法来确定航行器的位置信息,实现了无人系统间的精确定位。汤高宇在非线性滤波算法的基础上,提出一种基于迭代的主从式协同导航算法,在得到无人系统状态信息后,对量测算法进行迭代修正,直至获得理想的导航精度,较传统的非线性滤波算法提高了导航精度。王俊将主从式与并行式算法相结合,提出一种基于自适应快恢复的分布式协同导航算法,选择误差最小的水下无人系统作为领航者,减少水下多无人系统的导航误差;利用自适应的快恢复算法,在任务执行过程中自适应选择新的领航者,解决了领航者的失效问题。Chen等提出两种新的容错控制技术,使得每个相邻的水下无人系统间都可交换信息,即利用分布式共识控制策略来容忍主从式和并行式系统协同导航过程中的信息传输故障。为了给水下无人系统集群协同导航提供有效的路径,Sahu等提出一种基于模糊人工势函数的模糊控制算法,该算法优于数学势函数的控制器性能,实现了精确的路径选择。
4 发展趋势
随着军事作战模式的自主化和智能化,无人系统因其军事用途多样化已成为现代作战装备中不可或缺的一员,而集群化是无人系统的重要发展方向。但对于水下无人系统集群,还存在较多的技术难题亟待解决。针对水下无人系统集群的感知和协同技术,后续的研究可以重点关注以下三个方面。
1)提升集群环境感知的能力。信息感知是后续集群决策和协同控制的依据,但复杂的水下环境对水下无人系统的信息感知造成了很大干扰,降低了水下感知的准确性。后续研究应立足大纵深、高动态的海洋环境感知技术,改善水下获取图像的显示质量,提高水下无人系统的探测准确性。具体地,借助深度学习强大的学习能力,解决环境因素导致的图像退化问题,改善水下成像的质量。应开展异源传感信息的融合方法研究,提高无人系统携带的多种异源传感器获取信息的利用率,提升单个无人系统的探测能力。同时,要开展多视角、多特征以及多平台的协同感知融合技术研究,通过跨平台信息融合、在线协同更新和分布式集成学习等方式,提高无人系统集群的感知范围和感知精度。
2)增加集群协同通信的稳定性。协同通信是水下无人系统集群内各系统间实现互联互通,接收和回传指令、战场态势信息的基本保障。然而,水体天然的屏障作用为水下无线实时通信的实现制造了技术壁垒。应开展基于场景驱动的协同通信技术研究,重点突破水下环境中无人系统集群全域信息共享以及信息交互等关键技术,利用边缘计算代替云计算以建立多代理信息互补模型,有效提高协同通信的数据传输效率。同时,考虑引入高动态、大带宽通信技术,提高信息传递带宽及实时性。应进一步关注无线通信网络的抗干扰能力,提高集群信息共享的可靠性和安全性。
3)跨域多种类无人系统集群协同研究。跨陆、海、空域的立体式协同态势感知已成为重要的发展趋势,但受限于异构融合、工作条件、复杂环境等多重因素,跨域协同作战具有高度的复杂性,无人系统集群在交互学习、协同运行方面具有很大的挑战性。后续研究应充分利用人工智能技术,立足多层次、跨时空的统一表征感知模型,开展多维度、跨领域、大数据驱动的多无人系统集群协同感知理论和方法研究,重点突破多种类无人系统协作领域中无人系统的角色分配、意外情境响应机制等关键技术,根据不同种类无人系统的优势进行角色划分,以实现全空间域的感知互补,构建一种分布式学习和云边缘协同智能传感技术,以应对跨域任务的多样性挑战。
