基于SIFT算法的舰炮对岸射击可行性研究
2022-10-17姜涛,王磊,李猛
姜 涛,王 磊,李 猛
(1.海军大连舰艇学院,辽宁 大连 116018;2.陆军预备役第四基地参谋部,山东 济南 250022)
舰炮使用传统弹药对岸上不可见目标射击时,因无法实施有效的射击观测,导致射击诸元、弹药消耗量、火力毁伤效果等很难准确研判。针对这一实际情况,提出依托图像末制导弹药完成舰炮对岸射击的方法,理论框架由图像处理技术搭建,依托无人机、侦察弹等空中观测手段确定射击开始诸元并锁定目标图像,建立目标图像模板传导至弹丸,弹丸发射后,前段使用惯性制导,末段以图像匹配技术为基础实施末制导,最终达到精确打击的目的。本文主要研究内容为末制导阶段的图像匹配技术,结合遥感图像灰度高、色域低的特性,通过缩减经典SIFT算法DOG空间以及模板图像预处理的方式,进一步减少匹配时间;为验证弹丸完成图像匹配后,剩余飞行距离是否可完成末制导,对实际应用进行理论分析,构建图像匹配末制导用于舰炮对岸射击的理论研究框架。
1 理论描述
20世纪70年代,美军在巡航导弹制导的研究上,最先提出了图像匹配(Image Matching)概念。此后图像匹配在武器制导方面起到了重要作用,应用图像匹配制导可有效提高命中精度。此类导弹,如麦道公司的“斯拉姆”远程空地导弹、法国的“飞鱼”反舰导弹、美国“战斧”巡航导弹等,命中精度可达到10 m以内。在图像制导类信息化弹药研发上,国内多家机构已解决了惯导/图像导引头一体化集成仿真、观瞄图像与导引头图像一体化仿真等关键技术。
针对舰炮对岸上不可见目标射击时,诸元、弹药消耗量、火力毁伤效果难以准确判断的实际,引入图像末制导弹药,即可达到精确打击、精确研判弹药消耗、随时观察毁伤效果的目标。其实现过程如图1所示。

图1 基于图像制导的舰炮对岸射击流程图
基于图像制导的舰炮对岸射击流程大体为:1)采用无人机、侦察弹等空中观测手段进行射击观测,确定射击开始诸元,传输目标图像;2)由火控计算机或专属电视侦察计算机对目标图像预处理,建立目标模板图;3)将模板图像传输至弹上计算机,设定射击开始诸元;4)按照惯性制导方式发射弹丸(或采取曲射击方式以增大射角);5)弹载光学元件与弹上计算机在一定位置完成目标图与模板图的图像匹配;6)依托弹上导引头、舵机等组件完成末制导;7)完成精确打击,无人机检验火力毁伤效果。
图像制导弹药的各制导控制部件,如导引头、光电系统、舵机、惯导等与弹上计算机组成了一个完整的末制导体系,由于各部件种类繁多,且目前对于舰炮也没有成型的图像制导弹药作为参考,在本文研究中,将制导弹丸整体作为质点来仿真,重点是图像采集后的模板图预处理与图像匹配的算法研究。
2 图像匹配SIFT算法
图像匹配一般过程为:根据算法进行特征检测,而后对特征进行描述,最后确定相似性度量准则和几何变换模型,完成图像匹配。尽管目前图像匹配的算法众多,但尺度不变特征变换(SIFT)算法仍然是其中鲁棒性相对较好的。在1999年的计算机视觉国际会议上,Lowe.D.G首次提出了SIFT算法,并在2004年对算法做了进一步的完善。通过文献可知,SIFT算法在实时图像平移、缩放、旋转、亮度变化、视角变换等条件下依然具有很好的匹配性。
2.1 SIFT算法原理
SIFT算法对图像特征点的筛选、提取、描述大体可分为四步:
1)尺度空间极值检测。对输入的原始图像做高斯滤波,建立图像高斯金字塔,即用高斯核函数(,,)对输入图像(,)做卷积计算:
(,,)=(,,)⊗(,)
(1)
计算所得即为输入图像的尺度空间,(,)为图像的像素坐标,为尺度坐标,导入高斯差分函数(,,)建立高斯差分金字塔:
(,,)=[(,,)-(,,)]⊗(,)=(,,)-(,,)
(2)
式中,是一个常量。通过各像素点的DOG算子值与同尺度下的8个相邻点、上下相邻尺度对应的26个点比对,若在某像素点处其值为邻域像素点的极值,则定义该点为特征点。
2)定位筛选特征点。通过三元二阶泰勒展开确定关键点的位置和尺度,将对比度低的特征点和不稳定的边缘点剔除掉,进一步提升算法的抗噪能力。
3)特征点方向分配。通过创建梯度方向直方图来统计邻域内像素的梯度方向分布,根据直方图来确定特征点主方向。后面所有对图像数据的操作都是基于关键点的方向、尺度和位置进行的变换,使得描述符具有旋转不变性。
4)特征点描述向量。根据所得特征点的主方向旋转坐标轴,而后选取以特征点为中心的16×16矩形窗口,将其平均分成16个4×4子窗口。每个子窗口中计算8方向梯度累加值,最终每个特征点都可以得到一个16×8=128维的描述向量。
2.2 SIFT算法改进
众多学者对SIFT经典算法进行改进,但因应用环境的不同,适用的改进算法亦不相同,如将图像匹配应用至图像制导,对图像特征匹配的效率要求更高,匹配的时间与精度同等重要。在保证匹配精度的同时,为更有效地减少匹配时间,参考文献[11]中采用了适当减少尺度空间的方法,如图 2 所示,采用原始输入图像作为高斯金字塔的初始层,并从第二组尺度空间展开特征检测,在进行特征点定位筛选时使用更高的对比度阈值以提高特征点的稳定性。

图2 改进尺度空间示意图
2.3 模板预处理
图像匹配的最后过程是特征点的匹配,即分别对模板图(无人机采集的目标图像)和实时图(弹丸光电系统捕捉的图像)建立关键点描述子集合,通过两点集内关键点描述子的比对来完成。经典方法为穷举法,但耗时太多,目前大多学者采用kd树数据结构来完成比对,但不管使用何种方法,令模板图与实时图像素尺寸相同,会使矩阵计算更容易、更快捷,这就需要对无人机采集的目标图像进行预处理,流程如图3所示。

图3 模板预处理流程示意图
无人机采集的图像经火控计算机操作,框选出目标图像,将所选图像复制到与弹丸光电系统同像素尺寸空白图内(去除无效匹配内容),以此图像作为最终模板图,完成后续匹配工作,这样对目标模板图的预处理可以减少后续匹配中矩阵的运算量,缩减匹配时间,而这样的预处理无论在操作还是程序设定上都很容易实现。
3 仿真分析
本文基于Python软件实现图像匹配。为了检验改进SIFT算法对图像的匹配结果及用时,本文选取中科图新地球大连地区某岛屿卫星图作为仿真对象,图像尺寸800*600像素,模板图像如图4(左),预射击目标定义如图4(中)所示房屋(为便于观察匹配结果,目标区域放大10倍),实时图像采用平移变换如图4(右)。

图4 定义仿真图像
1)目标模板图像预处理。仿真中实时图像定义尺寸800*600分辨率,目标模板预处理即是将目标区域定义到同像素空白图内,为便于观察匹配结果,目标区域按原像素尺寸放大10倍,结果如图5所示。
图5 目标模板(放大10倍)
2)模板与实时图像分别建立高斯差分金字塔。确定高斯金字塔组数、差分层数、高斯核函数。
3)定义筛选特征点。主要是应用三元二次泰勒展开精确定位特征点,通过设定阈值去除噪声点、低对比度点以及边缘响应。
最终得到模板与实时图像特征点,如图6所示。

图6 模板与实时图像的特征点
4)确定特征点主方向
统计以特征点为圆心,以该特征点所在的高斯图像尺度的1.5倍为半径的圆内所有像素梯度方向及幅值。使用直方图统计邻域内像素的梯度和方向,直方图的峰值方向代表了关键点的主方向,至此,含有位置、尺度和方向的关键点即是该图像的SIFT特征点,如图7所示。

图7 模板与实时图像的特征点(含方向)
5)完成图像匹配。分别对模板与实时图像建立描述子集合,图像匹配通过两集合内描述子的比对来完成。为了提高算法的效率,高斯金字塔的最底层并不采用扩展后的输入图像,而是使用原始的输入图像,应用Python软件完成图像匹配,匹配结果如图8所示,用时2.184 s。

图8 模板与实时图像的匹配
与上述匹配流程相同,继续针对缩放、亮度、旋转、视角、综合等5种实时图像变换情况进行匹配。匹配结果及仿真时间如图9。
如图9所示,通过最终匹配结果可知缩减差分金字塔后的SIFT算法仍能准确地完成海岛图像特征匹配,平均匹配时间是2.437 s。但这一仿真结果因图像分辨率尺寸、计算机运行速度不同等原因,会与实际应用产生偏差,例如实际中采集到的遥感图像像素远大于800*600,或是实际使用其他更小的成像模式,或是终端使用GPU加速等等。总之,仿真的结果只能证明算法可行,匹配的时间仅做参考。

图9 实时图像 不同变换的匹配
4 应用分析
对于舰炮应用图像末制导炮弹对岸上不可见目标射击问题,目标识别、图像匹配仅为制导的前提,命中才是目的。针对实际应用问题,使用上述仿真结论,检验是否可以满足实际射击要求。参考图如图10所示。
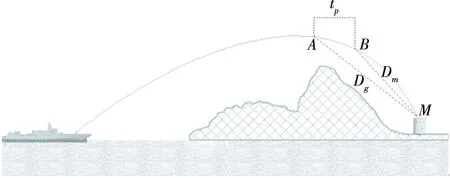
图10 射击应用分析
设点为弹载光电系统可观测目标位置,即点开始图像匹配,至点完成匹配,用时即匹配时间,点至目标点间距离为光电系统最大观测距离,此时点横坐标即为匹配开始距离,点至目标点间距离为末制导作用阶段,距离。不难得出只有符合弹丸导引系统距离时,图像制导才会发挥作用,否则为无效制导。
为直观得出开始匹配距离、匹配时间和末制导距离三者间数学关系,建立直接坐标系,如图11所示。

图11 数学模型分析
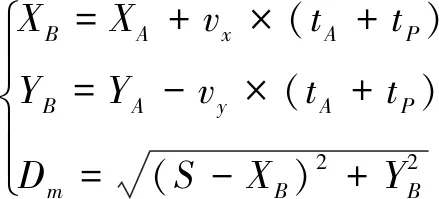
(3)
结合弹道方程,匹配距离、匹配时间和末制导距离关系即可确定。为使三者之间关系更加明晰,假定一组弹道参数,参考某型激光末制导炮弹,弹丸质量40.44 kg,弹丸直径152 mm,初速611 m/s,标准气象条件,无风,射击距离12 km,采用在弹道下降段随机抽取匹配开始点及结束点的方式,两点时间差即为匹配时间,点横坐标即为匹配距离,末制导距离通过点坐标即可得出,循环抽取,即可得出匹配距离、匹配时间和末制导距离的关系图,如图12所示。

图12 匹配距离、时间与末制导距离关系曲线图
为进一步验证上文图像匹配时间,将曲线图匹配时间范围缩小至3 s内,如图13所示。
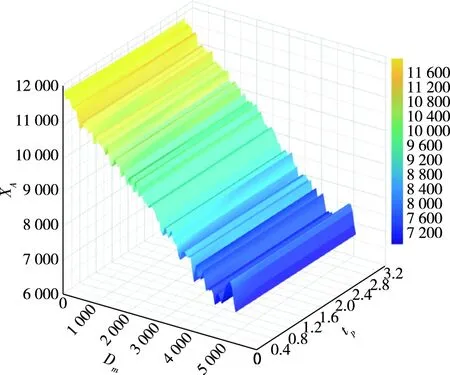
图13 匹配距离、时间与末制导距离关系曲线图(区域)
按照拟合结果,计算上文仿真匹配时间平均值2.437 s对应的,由于目前无成型的舰炮图像末制导弹药,匹配距离值与光学元件有效成像距离关联密切,假设理想条件下,弹道过最高点后即可完成成像,那么值取弹道顶点坐标,拟合弹道中弹道顶点坐标为(6 666,1 662),可得=4 866.9 m。
末制导段距离值参考某型激光末制导炮弹参数,末制导段炮目距离约1 000 m~2 000 m,结果大于该值则弹丸制导距离充分,满足制导条件,假设结果成立。
通过应用分析,基于SIFT算法的图像末制导类弹药应用于舰炮对岸射击方法可行,其射击结果与弹药射程、射角、弹载光电元件参数成正相关,与匹配时间、末制导段距离成负相关。这也就意味着发展更大的射程、更优质的弹载光学元件、更高效的匹配算法、更快速的弹载计算系统、更完备的末制导控制体系就能更好地完成图像制导任务。
5 结束语
不断演变的两栖作战概念对舰炮对岸射击提出了新的更高的要求,图像技术引用可有效解决传统舰炮对岸射击方法的不足。本文针对无人机采集图像,通过对SIFT改进算法建模仿真,检验了算法的可行性;对目标图模板进行统一化处理,提升了匹配的时间;对实际作战应用进行了分析,验证了实际的可操作性,也直观感受到未来图像制导类弹丸在末制导距离、匹配计算时间、光学元件最大可视距离上的需求,整体上为舰炮图像制导类炮弹的研发搭建了图像匹配理论研究框架。