井下装备智能控制信号传输系统快速切换机制研究
2022-10-14张元生于骞翔李若熙赵大壮刘潇璇陈锁涵王贤龙
吕 潇,张元生,于骞翔,李若熙,赵大壮,刘潇璇,陈锁涵,王贤龙
(1.矿冶科技集团有限公司,北京 100160;2.金属矿山智能开采技术北京市重点实验室,北京 102628;3.北京北矿智能科技有限公司,北京 102628;4.矿冶过程自动控制技术国家重点实验室,北京 102628)
在矿井、隧道、地下开采等涉及远程作业的工作场景中,常需要通过井下基站将设备采集到的作业数据传送至位于地面的调度控制中心。地面控制中心通过光纤或者以太网络与井下基站建立通信连接,接收井下基站上传的作业数据,并对作业数据进行处理,实现对作业设备的远程控制。作业设备需要通过井下基站间接实现与地面控制中心之间的数据传输,当作业设备发生移动、重启的作业过程时,常需要对作业设备当前连接的井下基站进行切换,以保证作业车辆与井下基站之间的通信质量。由于井下采矿作业环境恶劣,存在矿石等的强磁干扰,以及综采面窄等问题,对通信数据的传输速度要求极高,如何实现低时延高可靠的基站切换一直是行业难题。
作业车辆移动时通信基站切换过程如图1所示,一般是设备的通信模块检测井下基站发射的无线信号的信号强度,优先选择信号强的基站接入,同时存在一个信号通道的切换门限,当前接入基站的信号强度低于门限,则断开与当前基站连接并重新进行强信号网络连接,建立新的基站通信[1]。这种基站切换方式可归类为“硬切换”,因为与原基站断开和新基站的连接需要时间,即通信时延,文献[2]指出,在井下通信不良的环境中,车辆在与原基站的联系信道切断后,往往不能马上建立与新基站的连接,这时就出现一个短暂的中断,可能会造成地面控制中心与作业车辆发生失联,使得地面控制中心在这段时间内发送给作业车辆的控制类信号数据丢失,导致地面控制中心对作业车辆失去控制。

图1 硬切换三阶段Fig.1 Three stages of Hard-Switching
已有的研究中,基站切换的时延主要通过改变切换算法,找到小区之间的最佳基站接入。文献[3]采用基于马尔科夫决策过程(MDP)的切换决策算法,利用贝尔曼方程采用循环迭代方法,得到最佳切换策略,但仍存在断开、重关联的有缝切换问题。文献[4,5]提出的将模糊控制逻辑和ELECTRE算法相结合的垂直切换方法,其仿真结果、性能度量表明算法使网络开销明显减少。文献[6]提出了基于机车位置和保证服务质量(Quality of Service,QoS)保证无缝切换机制(QGSH),该机制包括QoS保证AP选择算法(QGAS)及双无线接口无缝切换过程(DSHP),通过定位算法获取机车所在位置,再根据负载阈值,信号强度及切换时间限制来决定最佳可接入基站。但是,以上研究都是从应用层出发降低切换中断延时,并非在通信层面降低延时。因此,针对硬切换的时延,需要解决设备硬切换的信号中断问题,并在井下多干扰和阻挡的复杂通信环境下应用。
综上,本文提出多射频冗余的基站切换方式。首先,采用无中心节点模式建立设备无线通信切换场景;其次,采用多射频冗余切换方式,在通信协议层面改变基站切换方式;最后,测试运行中的设备在基站切换过程中的通信延时,通过实验室测试切换延时检验通信协议的有效性和可靠性。
1 切换场景描述
如图2为井下通信切换的场景[7],主要包括以下几个部分,车载终端(Station,STA)是配有无线网络接口的设备,相互之间可进行数据传输;基站提供网络覆盖,具有将无线通信变为有线通信的桥接功能,在井下通信网中,基站发出的通信信号受到巷道壁阻挡而导致网络覆盖面窄,因此需要安装大量基站来保证网络的全覆盖,这也导致了STA在基站间的频繁切换。

图2 井下通信基站切换场景框图Fig.2 Block diagram of underground communication handover scenario
2 算法描述
通常情况井下使用的切换方式属于硬切换,基本原理是从一个基站覆盖区域进入另一个基站覆盖区域时,先断开之前的网络连接,再与新基站连接[8]。在移动通信系统中,当处于连接状态的移动台从一个小区移动到另一个小区时,为了使通信不中断,通信网控制系统通常会将与原服务小区的连接释放,并与新的服务小区产生连接来保证移动台的业务传输。
通常无线通信系统都会有多个射频通道,例如WiFi的Channel射频分20/40/80 MHz多个通道,切换过程降低时延的有效方式之一是使用两个射频通道同时工作,一个射频通道连接旧基站,另一个射频通道连接新基站[9],该切换方式的切换中断延时可以大幅降低,但也存在两个射频通道工作的切换没有标准规定的问题,因此需要定义全新的切换机制。
为重新定义切换机制,本文沿用文献[5]及文献[10]中的面向QoS保障的QGSH机制,考虑AP负载和切换时间等应用层指标的前提,增加通信层的丢包率和切换时延参数,判断接收信号强度指示RSSI,更为精确地刻画切换前后的信道状态,从而辅助用户选择最优的基站接入。
首先,利用接收信号强度RSSI判断触发切换过程的时机;其次,进入切换过程后,判断切换是否满足要求,如果还可以等待,则使用RSSI、负载和丢包率一起判断是否满足切换条件,即当前时刻满足:

如果RSSI、负载和丢包率满足条件:

RSSIth、Load th和P loss-th分别表示接受信号强度门限、负载门限和丢包率门限,则发生切换,否则继续等待。具体算法见表1。

表1 算法流程表Table 1 Algorithm flowchart
3 数据通道切换实验
基于本机制,在对实验室的自研WiFi6设备底层通信协议进行了优化和创新后,开展数据传输切换实验对优化后的切换机制进行验证。在矿冶研发中心搭建模拟试验环境,实验用切换信号通道的装置包括:控制中心、车载移动终端STA和多个基站,车载移动终端包含两个射频数据传输通路,分别工作在不同无线频率,分别命名为STA_a和STA_b,将控制中心与每一个基站网络连接,并使STA在实验过程中沿特定路径移动。在STA移动的过程中,以STA为中心、100 m为半径,分别确定与STA之间的地理距离小于或者等于100 m的基站a、基站b和基站c位置。其中,基站a为与STA通过STA_a建立网络连接的第一井下基站,在STA移动过程中,若基站b发射的无线信号的信号强度最强且该基站位置为预设相邻基站,则可以直接确定基站b是第二基站。
第一第二基站选取完成后,开始进行切换控制实验。车载移动终端通过STA_b与第二基站建立第二信号通道,停止通过STA_a向控制中心发送第一数据,并在第二信号通道不满足向控制中心发送的第二数据的接收条件时,继续通过STA_a接收控制中心发送的数据,直到切换STA_b完成。为了避免在此过程中产生的切换延时情况,实验设置STA在与第二基站通过STA_b建立连接之后,关闭STA_a的发送端口,但是仍然保留STA_a接收端口的开启,继续利用接收控制中心发送的第二数据,直至数据包完全由STA_b通道开始传输,STA_a上无接收数据,以防止通道切换过程中数据包传输未完成,造成丢包。通过这样的方式,在信号通道切换的过程,保证控制中心发送给STA的数据不会丢失,并完成数据通道的无缝切换。图3为实验中的基站设置实物图。

图3 基站切换测试实验Fig.3 Base station handover test experiment
实验过程中,保持移动状态的STA与控制中心的不间断ping包测试,记录切换动作发生时的延迟数据作为切换延时数据。实验测得切换延时数据见表2。
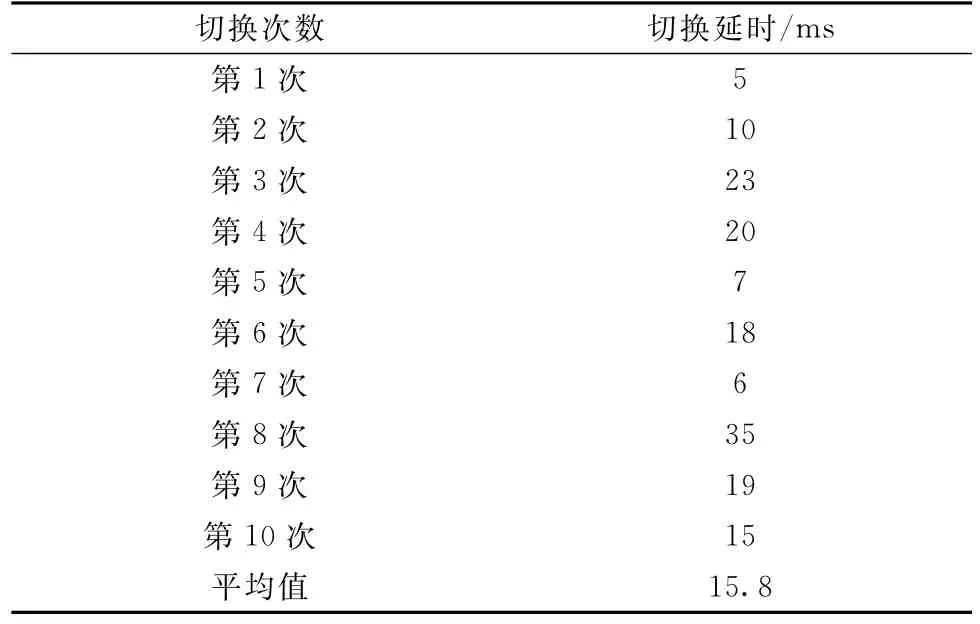
表2 切换延时测试数据Table 2 Switching delay test data
从实验室测试数据可以看出,本文设计可实现10次切换延迟最低达到5 ms,平均延时15.8 ms,远小于硬切换200 ms的延时。
实验室测试完成后,将研究成果应用于梅山铁矿移动智能装备无人驾驶系统,并开展了大量工程现场应用试验,实现了井上控制中心对运行中的井下设备无卡顿的视频监控与不间断控制。试验结果表明本技术可以实现设备在不同基站设备之间的快速无缝漫游,实现井下装备的流媒体数据、控制信息、预警信息等关键数据的稳定不间断在线传输。
4 结论
针对井下数据通信的基站切换信道中断问题,设计了一种使用多射频同时工作的低延时的井下通信过程基站切换机制,井下设备可以在基站切换过程中遵循强信号优先连接的原则,同时使用两个射频通道进行新基站的连接和旧基站的数据传输,有效减少切换过程延时。通过实验验证该设计具有低切换延时的优点,可为井下设备的远程无人化运行控制提供有力的通信网络基础。
