外骨骼足端人机接触力测量装置研究
2022-10-14姜文正高海波丘世因李满天查富生
邓 静,姜文正,高海波,丘世因,李满天,查富生
(1.深圳航天科技创新研究院,广东 深圳,518052;2.哈尔滨工业大学,黑龙江 哈尔滨,150001;3.深圳航天龙海特智能装备有限公司,广东 深圳,518052;4.天津大学医学工程与转化医学研究院,天津 300072)
0 引言
外骨骼机器人在康复医疗、工业和军事等领域逐渐展现出巨大的应用潜力。人机交互运动控制是保障穿戴者的动作灵活性和舒适性,实现外骨骼机器人在复杂环境中应用的关键[1]。
人机接触力感知技术的诞生,极大地拓展了机器人的应用领域。在工业领域,基于末端接触力的随动控制技术,解决了机械臂轨迹示教编程问题[2],在医疗领域,人机接触力交互感知,使微创手术、远程手术成为可能[3]。在外骨骼机器人领域,人机接触力感知技术使外骨骼与人体之间的交互作用由预设运动轨迹的模式转变成动态的力交互模式,从而让外骨骼能够适应穿戴者复杂而灵活的动作。HIT-LEX[4-5]外骨骼上应用了基于人机接触力的运动控制技术,实现了复杂路面环境下对人体任意运动的支持,IT-Knee[6]膝部助力外骨骼,通过测量人体足底力,实现人体关节力矩的求解,从而为外骨骼主动辅助人体运动奠定基础。可见,足端人机接触力测量,是解决下肢外骨骼机器人与人体交互运动灵活性的关键。
足端人机接触力测量装置的设计主要面临以下挑战:首先是足地接触状态复杂,足跟触地、脚掌着地和足趾触地等多种支撑状态,以及路面凹凸不平引起的足底支撑点无规律变化,对测力装置的适应性提出较高要求;其次是人在行走过程中,趾关节存在背屈/跖屈运动,如果采用刚性鞋底结构,将导致穿戴者趾关节无法弯曲,影响行走稳定性和体能消耗[7];同时外骨骼机器人是穿戴式装备,过重、过厚的鞋底严重影响轻便性和灵活性。如何在有限尺寸空间和重量限制下实现测力传感器的集成,同时尽量提高足力测量的精度、灵敏度、抗冲击性和抗零点漂移等,是有待进一步研究的问题。
人体以矢状面运动为主,为了避免系统过于庞杂,绝大多数外骨骼机器人仅在矢状面内辅助人体。在矢状面中,足端接触力包含竖向力、前后向力、背屈/跖屈力矩共3个分量。维多利亚大学研究了基于膜片压力传感器的测力鞋垫[8],结构轻便,广泛用于触地检测,但是无法获得前后向力,对于竖向力的测量准确度也欠佳。韩国延世大学设计了整体式测力鞋底[9],测量精度较高,但是整个刚性鞋底导致趾关节无法弯曲,影响行走舒适性,同时为了能够承受足跟着地时在传感器上产生的大扭矩,导致传感器体积大,灵敏度降低。分布式多传感器测量方案[10-11]可以避免力传感器承受过大的扭矩,同时可以将鞋底设计为柔性体,然而多个传感器之间的内应力可能引起较大的测量误差。
针对上述问题,本文研究一种适应复杂足地接触状态、灵敏度较高和抗过载能力较强的足端人机接触力测量装置,并通过实验验证其有效性。
1 足端接触力测量装置结构设计
1.1 足端人机连接机构设计
足端人机连接机构的作用是使测力装置牢固连接在人体足端。采取如图1 所示的连接方式。
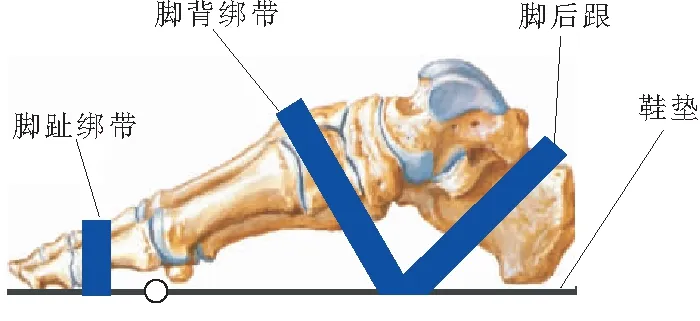
图1 足端人机连接机制
将人的足弓视为刚体,在足弓下方设置1块硬质的碳纤维板,通过脚背绷带和脚跟绷带与足弓连接。足底平面约束3个自由度,绑带约束左右平移、前后平移2个自由度,另外在脚趾处设置绷带,配合其他2个绷带限制绕小腿轴线转动的1个自由度。通过上述方式,实现6自由度全约束。为了避免干扰趾关节运动,在趾关节下方设置可挠屈的弹性薄钢板,通过薄钢板挠曲变形来适应趾关节的转动。
1.2 足底传感器布置
关于传感器布置位置的设计,主要考虑对足底的有效支撑,以及在各种触地状态下足力的有效测量。
本文采取分布式的多传感器方案,包含1个三维力传感器和2个一维力传感器。在足跟下方设置1个高过载裕度的一维力传感器来测量地面对足跟的支撑力Fz1,该传感器能直接承受足跟着地过程的大冲击载荷。在趾关节下方偏后的位置设置1个三维力传感器,该传感器可获取竖向支撑力Fz2和前后向支撑力Fx2。足跟离地后,趾关节开始弯曲,压力中心转移到趾关节和脚趾上,在趾头下方设置了一维力传感器来测量足尖下方的地面支反力Fz3。
1.3 传感器连接机构设计
本文设计了刚柔结合的测力鞋底结构,如图2所示。测力鞋底整体分上下2层,上层钢板与人足相连,下层钢板与外骨骼相连,2层钢板之间通过力传感器连接以实现足力的测量。足弓下方采用碳纤维板增加刚度,对足弓形成强有力的支撑。趾关节下方的区域不设置碳纤维板,当趾关节转动时,上下2层弹性钢板通过柔性挠曲变形来顺应。

图2 测力鞋底结构
多个力传感器同时测量同一个对象的情况下,如果安装结构上存在过约束,则容易引起内应力,导致零点漂移等测量误差。为此在3个力传感器的连接结构上增加运动副,以消除或减少冗余约束:3个力传感器的下端都与下层弹性钢板固连;三维力传感器的上端通过1个转动副与上板连接,释放背屈/跖屈方向的转动约束;前后2个一维力传感器通过具有3个转动自由度的球铰链和1个平动自由度的滑动副连接到上板,使一维力传感器只承受轴向拉压力和侧向力,避免对前后方向力测量的干扰。脚趾下方的一维力传感器上的滑动副有较长的滑道,当趾关节弯曲时,上下2层弹性钢板会出现前后搓动,滚针排沿滑道滚动,防止运动干涉,保证趾关节的活动度。
2 力传感器信号处理电路
2.1 低噪声电源电路
基于桥式应变片的力传感器输出信号幅值小,仅有数毫伏,对噪声干扰较为敏感,因此信号处理电路设计上需严格控制各环节噪声,其中来自供电电源的噪声不容忽视。为此,设计了超低噪声的正负电源模块,如图3所示。
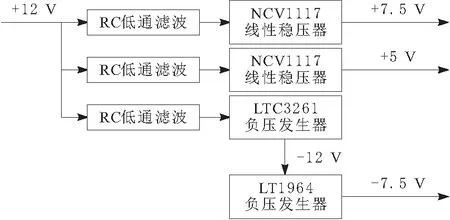
图3 低噪声电源电路
模块采用+12 V单电源供电,输出1路高精度的+5 V,作为力传感器的激励电压;输出±7.5 V,为信号调理电路中运算放大器供电。其中,+5 V、+7.5 V分别由2个NCV1117线性稳压芯片提供。NCV1117是安森美半导体公司生产的具有高电源纹波抑制比的线性可调稳压芯片,对于频率小于10 kHz的电源纹波具有60 dB以上的衰减,可以大幅度抑制来自电源的中低频噪声。于此同时,在NCV1117的输入端串联RC低通滤波电路,抑制频率为10 kHz以上的高频纹波,获得高稳定性、超低噪声的电压输出。-7.5 V则是首先通过LTC3261负压发生器将+12 V转换为-12 V,再通过LTC1964线性稳压模块调整为-7.5 V输出。LTC3261是凌特公司生产的负输出电荷泵,它通过内置的50~500 kHz时钟,切换电容的充放电回路,实现将输入的正电压转换为输出负电压的功能。LT1964则是ADI公司生产的低噪声可调负压稳压器,可以在10 Hz~100 kHz范围内提供噪声低于30 μV电压输出。
2.2 力传感器信号放大电路
本文采用桥式应变片力传感器。应变桥输出信号幅值小,内阻较大,极易受噪声干扰,同时桥臂共模电压对容易造成输出零点偏移,此外放大电路与AD转换器之间的地线压降可能造成测量误差。为了获得高的测量精度,设计了如图4所示的信号处理电路。
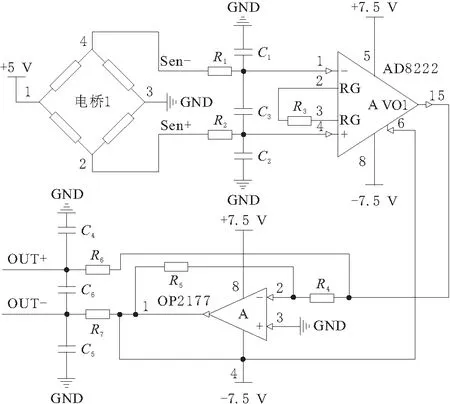
图4 力传感器信号放大电路
在放大器输入端设置1个由R1、C3、R2构成低通滤波器,抑制差模噪声干扰,同时通过C1、C2接地电容抑制共模噪声干扰。信号前级放大器采用AD8222仪表放大器,它具有126 dB的高共模抑制比,可以抑制电桥上约2.5 V的共模电压对输出造成的干扰。电压增益仅通过电阻R3设置,可以根据传感器灵敏度、量程和输出电压范围来做合理取值。输出端采用精密运算放大器OP2177构成反向放大器,实现差分电压输出。根据香农采样定理,当采样频率小于被采样信号频率的1/2时,会产生频率混叠现象,导致测量误差,为此,在输出端也设置了RC低通滤波器电路,该滤波器不仅可以抑制高频噪声,而且可以防止输出短路造成运算放大器损坏。
3 足端接触力信号的解算
为方便计算,将足底3个力传感器获得的力信号统一向踝关节处合成,如图5所示。

图5 足底多个力传感器信号的合成
在前后方向上,只有三维力传感器独立承担了水平方向约束力。在竖直方向上,足跟、足弓和足尖下方的3个力传感器共同承担竖向约束力。在背屈/跖屈转动轴线方向上,由于3个传感器上均设置了转动铰链,因此不会单独产生力矩约束,而是由各传感器的受力,在力作用点相对与踝关节的偏移距离上产生力矩。列静力平衡方程可得到合成的前后向力Fx、竖向力Fz、背屈/跖屈力矩τy,即
(1)
4 足底力测量精度实验分析
为了检验足端人机接触力测量装置的精度,采用Kistler三维力台做对比实验分析。Kistler为瑞士出品的三维力台,主要用于生物力学分析、可以获取足底3个维度的力、力矩以及压力中心等数据。实验者体重约80 kg,穿戴足端接触力测量装置样机站在三维力台上,如图6所示,通过不同的运动,在足端产生作用力。同时采集三维力台和样机的数据进行对比分析。

图6 足底力测量对比实验
4.1 Fz对比实验
足底在竖直方向上的受力主要用于支撑人体重量,在跳跃运动中,足端受力状态复杂,同时存在较大的冲击载荷,因此选择跳跃运动来分析竖向测力精度。实验者完成10次跳跃运动,获得原始数据如图7 所示。

图7 足端接触力Fz
4.2 Fx对比实验
足底在水平方向上的受力可引起人体在水平方向上的加减速,而踏步、跳跃等运动中足底水平力不显著。为了使足底产生较大的水平力,采取静态施力的方式,即实验者穿戴测力鞋站在三维力台上,保持足底与力台接触,在不移动足底的情况下,通过摆腿,向足底施加前后向力,获得数据如图8所示。

图8 足端接触力Fx
4.3 τy对比实验
足底背屈/跖屈力矩主要有足底压力中心移动引起。伸蹲过程中,躯干前倾可引起较大的足底支反力矩,因此选择伸蹲运动来分析背屈/跖屈力矩测量精度。实验者穿戴足端人机接触力测量装置站在三维力台完成5次伸蹲,获得数据如图9所示。
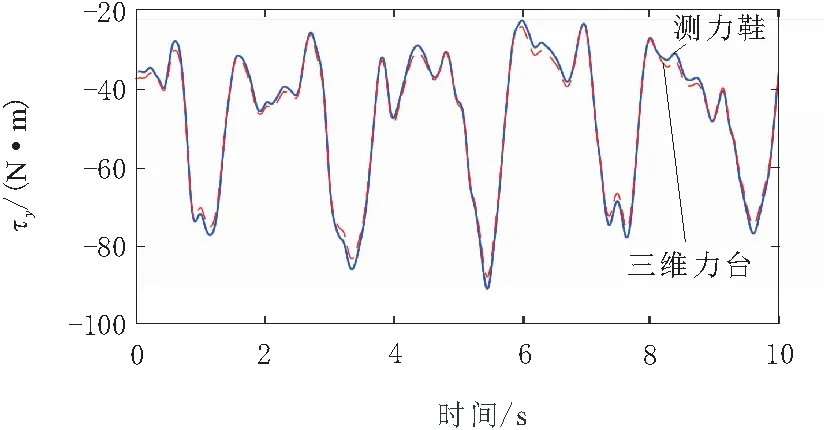
图9 足端接触力矩τy
以上实验数据表明:足端人机接触力测量装置获得的力/力矩曲线平滑,未出现大的噪声干扰,信噪比良好;实测曲线与三维力台数据曲线高度吻合,体现出良好的测量精度和动态性能;在跳跃时的剧烈冲击和复杂的足端接触状态下仍获得较为准确的测量结果,体现出良好的适应性和抗冲击性。
Fz实验中,足部腾空后,三维力台的数据降为0,而实测数据出现小的负值,该误差应该是由鞋底和自重引起;受力较大的情况下,曲线局部出现一定的偏差,应该是由碳纤维板的挠曲变形,以及运动副的摩擦力引起,这种差异随足端受力的减小而减小,不会引起显著的零点漂移问题。
5 原地跑过程的足底力测量实验
左、右足的实测足底力传感器数据以及映射到踝关节处的合力如图10所示。原地跑的过程中,脚趾先着地, 因此脚趾下方的力传感器输出信号Fz3先上升,而后支撑力主要转移到趾关节下方,当足跟下方的力传感器信号Fz1上升时,说明人的整个脚掌都着地,此后完成蹬地起跳过程,足力在竖直方向的合力显著高于人体重力,使身体向上加速跃起直至足尖离地后足力整体降为接近0。由于测力装置自重,在摆动相阶段竖直方向足力为负。可见本足力测量装置能较好地适应足的不同触地状态,而且在支撑相和摆动相阶段都能够获取人的足端接触力。

图10 原地跑时的足端接触力
6 结束语
本文针对外骨骼应用需求,设计了足端人机接触力测量装置,通过实验验证了功能指标与需求匹配,技术指标良好。分布式的传感器布置方案,配合用于消除传感器之间内应力的机构,可以获得较高的测力灵敏度和抗过载能力;刚柔结合的鞋底结构可以较好地适应趾关节弯曲运动;各通道相互独立的放大电路,结合程序化的多传感器信号合成方案,解决了冗余测量和统一基准问题。
