金属表面LED线结构光条纹图像增强方法
2022-10-14商执亿尹培丽
商执亿,尹培丽
(1.西安工业大学机电工程学院,陕西 西安 710021;2.西安工程大学机电工程学院,陕西 西安 710048)
0 引言
线结构光法因其非接触、效率高和结构简单等优点,被广泛应用在三维重构、缺陷检测等形貌测量场合[1-3]。该方法主要是通过采集被测表面的条纹图像,然后提取其中心数据来完成测量,因此,获取高质量的条纹图像是测量的前提[4-6]。
线结构光测量因受被测表面光学特性、环境光干扰和随机激光散斑噪声等因素的影响,通常无法获得高质量的条纹图像,需要通过图像处理的方法进行图像质量的增强[7-8]。纪运景等[9]提出了一种基于灰度缺失区域自适应增强的方法对条纹进行修复改善;阚建霞[10]提出了一种基于HSV颜色空间的改进的多尺度Retinex增强方法;李春明等[11]采用了自适应中值滤波算法和高斯滤波算法对条纹图像中的高斯噪声和椒盐噪声进行了去除;赵博华等[12]采用图像梯度增强方法、阈值分割方法和连通区域的思想去除了条纹图像中的噪声;Wang等[13]采用差分图像法对明场和暗场进行处理,消除了不均匀反射的影响,利用区域生长统计方法去除了随机的激光散斑噪声。
本文采用相干性低的LED光作为线结构光法的测量光源,避免了干涉散斑噪声的影响,搭建了LED线结构光测量系统,并通过分析测量金属表面形貌形成的条纹图像的特点,提出了采用基于拉普拉斯金字塔的曝光图像融合方法来增强条纹图像质量,最后完成了图像增强的实验。
1 LED线结构光测量系统及条纹图像特点
1.1 LED线结构光测量系统
本文搭建的LED线光法测量系统如图1a所示,系统主要由LED光源、狭缝、汇聚透镜组、工件装夹台、双远心镜头和CCD组成。该系统采用光三角测量原理,如图1b所示,LED光经过狭缝后变为1条线光,此时的光条宽度较大,通过多级透镜的汇聚后光条变细,然后投射到被测工件表面,经反射后被CCD采集。被测表面的高低起伏变化反馈在CCD靶面的条纹图像上,且为一一映射的关系,最后通过分析条纹图像的变化便可得到被测表面的高度信息。该测量系统的主要特点如下所述。
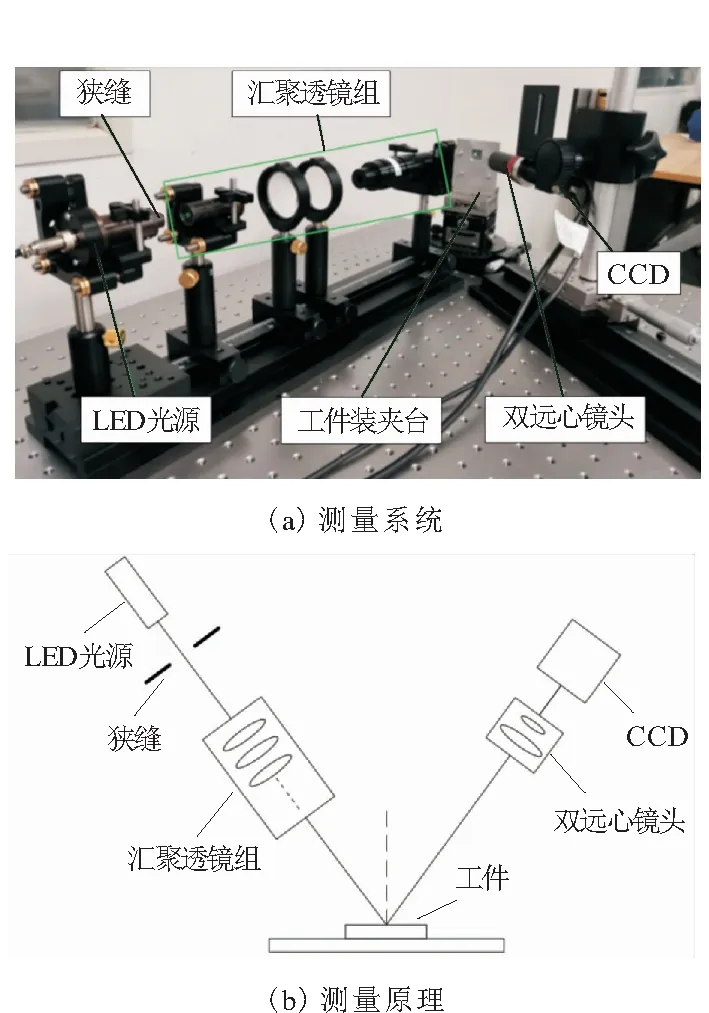
图1 LED线光法测量系统
a.采用相干性低的LED光源,减少测量中因干涉形成的散斑噪声的影响。此外,该系统汇聚形成的LED线光的光强呈均匀分布,这可以增加条纹图像的边缘对比度,便于分割感兴趣区域。
b.选用畸变率小的双远心镜头,所选镜头的畸变率小于0.06%,这可以大大减小条纹图像的畸变误差,提高测量精度。
c.该系统的主要参数:测量光长度为10 mm,宽度为70 μm,镜头的物距为63 mm,景深为1 mm,投射端的工作距离为110 mm。该系统可用于小尺寸工件表面的高精度形貌测量。
1.2 金属表面的LED线结构光条纹图像特点
LED线结构光法主要是通过采集被测工件表面的漫反射光来完成测量,因此分析被测表面的光学特性尤为重要。通常工件的表面光学特性与粗糙度相关,当表面比较粗糙时,光学特性主要呈漫反射状态,有利于测量。当表面比较光滑时,镜面反射占主导地位,为避免反光影响,需避开镜面反射角测量,但此时的漫反射又较弱,不利于测量。
工业测量中的金属工件占比较大,而金属表面的光学特性又比较复杂,多数情况其表面不是理想的漫反射状态,而是漫反射与镜面反射共存且不断变化的状态,由于漫反射的不均匀和存在大量不规则的镜面反射点,会导致采集到的条纹图出现局部过暗或过亮的颗粒点或小区域,降低图像质量。图2为采用本文测量系统采集的不同曝光时间下的金属粗糙度样块的表面条纹序列图,从图2a中可以看到条纹中存在大量过暗或过亮的颗粒点和小区域。虽然通过增加曝光时间可以消除多数过暗区域,但仍然存在局部过暗的信息缺失区域,如图2b和图2c所示。若曝光时间过大还会导致条纹宽度增加,噪声增多,掩盖真实的表面形貌信息,如图2d所示。

图2 不同曝光时间下的条纹图
2 LED线结构光条纹图像增强方法
根据LED线结构光条纹图像的特点,提出采用基于拉普拉斯金字塔的曝光图像融合方法增强图像质量。该方法的主要原理是将多曝光图像分解为多个不同空间分辨率的子图像,构建金字塔式的图像层,将有用的图像信息保留在各个层图像中,然后重构图像[14-15]。
a.高斯金字塔图像的构建。高斯金字塔图像的构建首先是对原图像进行低通滤波和隔点采样得到第1层图像,然后对第1层图像做上述处理得到第2层图像,以此类推,构建金字塔,其过程为
Ga(i,j)=
(1)
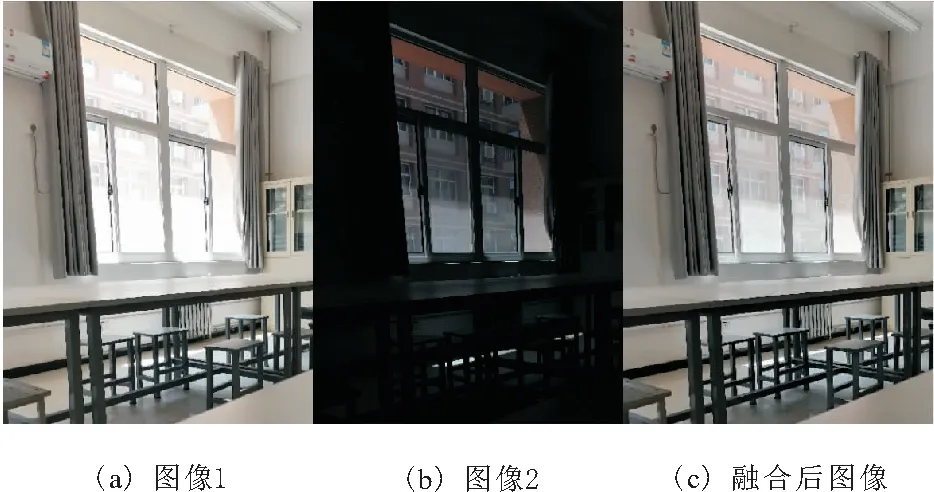
1≤a≤N,0≤i Ga为高斯金字塔的第a层图像;N为高斯金字塔顶层号;Ia和Ja分别为高斯金字塔第a层图像的行数和列数;ω(m,n)为5×5大小的低通滤波器窗口,其滤波系数为 b.拉普拉斯金字塔图像的构建。该过程是对高斯金字塔图像进行内插图像点的放大处理,放大后的图像与上一层图像尺寸相同,其过程为: (2) 0 (3) (4) N为拉普拉斯金字塔顶层号;La为拉普拉斯金字塔的第a层图像。 将上述原理应用于多曝光图像序列中,可以求出多图像融合的拉普拉斯金字塔图像层为 (5) k为多曝光图像数;Pa为融合后的拉普拉斯金字塔的第a层图像。 c.图像重构。采用相同的窗口函数对图像进行重构,过程为 (6) 0 Fa为拉普拉斯金字塔图层与还原图层的综合体,表达式为 (7) 由式(7)逐层递推,便可得到融合后的图像。 采用上述曝光图像融合方法完成图像增强实验,实验中发现选用2幅合适的曝光图的融合结果可以达到多序列曝光图融合的效果,因此采用2幅不同曝光时间的图像进行融合,这样也大大提高了融合的效率,所采用金字塔模型层数为3层。 为验证本文图像增强方法的有效性,完成实验室环境图像的融合实验,实验结果如图3所示,图3a和图3b为原图像,图3c为融合的结果。 图3 实验室环境图像增强结果 从图3可以看出,图像1中窗户处的曝光量大,以致窗外的景象缺失;图像2中窗户处的景象清晰,而周围的室内景象因曝光不足无法看清;而融合后的图像曝光均匀,信息完整,有效整合了2幅原图像的优点。证明了上述方法的可行性。 采用本文搭建的LED线光法测量系统采集金属刨床粗糙度样块的表面条纹。被测金属样块如图4所示,样块根据不同的粗糙度共分5个,测量其中的▽4样块。采集到的不同曝光时间的条纹如图5a和图5b所示,采用曝光图像融合方法处理后的条纹如图5c所示。 图4 被测金属样块 从图5可以看出, 条纹图1中条纹区存在大量过暗或过亮的颗粒点和小区域,信息缺失明显。条纹图2虽然条纹整体的光强分布均匀,不存在信息缺失,但因曝光时间长,条纹整体变宽,掩盖了部分真实的条纹信息,且条纹边缘的噪声毛刺增加。而融合后的条纹光强分布均匀,整合了2幅原条纹图中的有用细节,信息缺失的问题得到了改善。 图5 条纹图像增强结果 采用相同方法提取3个条纹的中心,绘制轮廓曲线,并与触针法测量的轮廓曲线进行对比(因触针法的测量精度高,采用该方法的结果作为参考标准),计算点对点误差,结果如图6所示。图6中横坐标为测量的条纹长度,纵坐标为提取的条纹中心曲线高度。 图6 条纹中心提取结果及误差 分析图6的结果,融合后条纹的平均中心提取误差为1.52 μm,比条纹1和条纹2的2.20 μm和1.72 μm均有所减小。融合后条纹的最大中心提取误差为5.87 μm,也比条纹1和条纹2的8.06 μm和7.40 μm要小。说明采用本文方法增强条纹图像可以提高条纹中心的提取精度。 提出一种LED线结构光轮廓测量方法,针对该方法在测量金属表面轮廓时条纹图像的问题,提出了采用基于拉普拉斯金字塔的曝光图像融合方法来增强图像质量。实验室环境图像增强实验的结果表明,本文方法可以挖掘不同曝光图像的细节信息,并进行融合,融合后的图像质量明显提高。金属表面条纹图像增强实验结果表明,该方法可以解决条纹图像信息缺失的问题,并提高了条纹中心的提取精度,融合后条纹的平均中心提取误差为1.52 μm,最大误差为5.87 μm。
3 图像增强实验
3.1 环境图像增强实验
3.2 条纹图像增强实验


3.3 条纹中心提取结果

4 结束语
