基于多源域深度迁移学习的舵机在线故障诊断
2022-10-14吕丞辉程进军胡阳光文斌成李剑峰
吕丞辉,程进军,胡阳光,文斌成,李剑峰
(1.空军工程大学 航空工程学院, 西安 710038; 2. 63768 部队, 西安 710000)
1 引言
舵机是飞行器的执行机构,同时也是航空武器控制系统稳定运行的基础,它将控制信号转换为机械运动,驱动舵面偏转,其动态特性直接关系到飞行器在飞行过程中的动态品质,决定着能否顺利完成飞行。通常,舵机处于大负载、高转速的使用条件,使得舵机轴承易于发生疲劳脱落、磨损、断裂等故障,从而影响舵机甚至系统的正常运行,造成灾难性事故的发生。因此,必须对舵机的工作状态进行监控,并实现在线故障诊断。在飞行过程中,在线故障诊断通过在舵机上布置各类传感器,监测各执行机构的运行状况,及时、准确的识别状态信息,当舵机存在隐患时,通过故障诊断技术快速识别并定位故障,能够在有限的处置时间内利用系统冗余设计、重构软硬件等技术方案实施故障屏蔽,启动故障单元备份系统,保障航空武器系统的正常运行。
轴承作为舵机的关键部件,其健康状态在一定程度上反映了舵机是否能健康运行。然而,航空武器舵机轴承的故障数据呈现小样本、标签不完备的特征;且当飞行器执行高(低)空作战任务时,舵机可加载不同的负载力矩和不同的过载控制指令,使得轴承的故障数据分布不同;另一方面,按照不同的分类方式,舵机的种类纷繁复杂,不同舵机,其轴承的故障数据分布也不同,由此带来了舵机在线故障诊断的不确定性和复杂性。以上述问题为切入点,利用已有的数据信息对航空武器舵机轴承领域中的小样本、不完备标注数据进行实时、准确的在线故障诊断是一个主要研究方向。
在线故障诊断作为提高系统可靠性、安全性的重要组成部分,将有效保证系统的安全运行,对预防灾难性事故具有重要意义。目前,基于数据驱动的轴承故障诊断不依靠故障产生机理,可在缺乏先验知识的情况下,通过机器学习或深度学习的方法对状态监测数据进行分类,实现状态识别。传统的机器学习故障诊断方法,如SVM(support vector machine)、KNN(K-Nearest Neighbor)、MLP(multilayer perceptron)等,在进行故障特征提取过程中,多依赖于专家知识,且由于多耦合因素影响下轴承振动数据的复杂性,此类方法不总可行。传统的深度学习故障诊断方法需要构建深层的网络模型,如CNN(convolutional neural network)、DBN(deep belief network)等方法,通过网络结构提取复杂高维振动数据中的隐藏特征,建立输入数据与输出类别之间的映射关系,实现端到端的故障分类。
然而,传统的机器学习、深度学习方法具有较高的准确率需要同时满足2个条件:训练集和测试集数据同分布和具有充足的数据标注。然而,在真实场景中,一方面由于工作环境的多样性,轴承的振动数据分布差异大,传统的机器学习、深度学习方法无法适应。另一方面,在实际设备运行过程中,轴承通常处于健康状态,很少发生故障,且采集的数据类型未知,难以获得新工作条件下轴承的故障数据和对应标签。因此,使用传统机器学习和深度学习的方法无法实现实际复杂工况下的故障诊断。
迁移学习作为机器学习的一个分支,克服了上述传统故障诊断算法的局限性。其主要思想是利用源域有标注的数据,训练出与源域数据分布不同的目标域样本的泛化故障诊断模型。迁移学习分为基于实例的迁移学习、基于特征的迁移学习和基于参数的迁移学习。基于特征的迁移学习方法因具有很好的纠正差异能力得到了广泛研究,其将源域样本和目标域样本映射到共享特征空间,通过度量并最小化源域和目标域数据特征之间的分布差异来挖掘两者之间的相似性,使得在源域上训练好的模型能应用于目标域任务中。常用的差异度量方式有最大均值偏差(maximum mean discrepancies,MMD)、关联对齐距离(CORrelation alignment,CORAL)等。Lu W等提出了一种深度神经网络故障诊断域适应算法,使用MMD减小了不同域之间的特征分布差异。Sun等将CORAL引入深度神经网络,以对齐源域和目标域样本的均值和协方差来最小化两者之间的差异,在Office-dataset数据集上展示出较好的性能。较于MMD、CORAL等距离度量方式,MK-MMD(multi kernel maximum mean discrepancies)可以更好地表示高维空间中数据特征的分布差异。王翎等利用结合域混淆和MK-MMD的深度适应网络,进一步提升了域适应效果,在Office-31数据集上具有较高的识别率。
在源域分布和目标域分布存在域转移的情况下,训练一个分类模型被称作域适应,域适应分为单源域适应和多源域适应。目前,大多数领域自适应算法关注于单源无监督自适应,即只有一个源域。如Xu Wang设计了一种基于MDIAN(multi-scale deep intra-class adaptive network)模型的迁移学习故障诊断模型,克服了源域数据和目标域数据服从不同分布的问题以及有关域移位问题;Liang Guo提出了一种新的基于深度卷积迁移学习网络的智能方法,在解决源域和目标域样本不同分布的基础上,引入目标域和源域的域分类错误,有效地将源域的知识迁移到目标域,并对目标域中的无标签数据进行分类。然而,处于复杂工况下的单源机器不能提供足够的诊断知识,而单源的一些组合域能提供更多的信息。Bin Yang在单源域的基础上提出了MSTLN(multi-source transfer learning network)的多源迁移学习网络,通过结合多个部分分布自适应子网络和一个多源诊断知识融合模块,从多个源机器中聚合和转移诊断知识;Bin Yang基于最大均值误差MMD(maximum mean discrepancies)度量来缩小源域和目标域的数据特征分布差异,通过所提方法FTNN(feature-based transfer neural network)将BLMs(bearings used in laboratory machines)的知识迁移到BRMs(bearings used in real-case machines)上,实现了跨设备的轴承故障诊断。然而,上述研究仅集中于使用共享特征提取器提取共享特征,很难学习到所有域的共享特征不变表示,且忽略了多源域和目标域出现的域分类不匹配问题,导致故障分类精度低。
在上述研究基础上,本文提出一种基于MFSAN(multiple feature spaces adaptation network)的多源域迁移学习在线舵机故障诊断算法,开展航空武器不同舵机轴承在不同工况下的在线故障诊断研究。
2 问题描述


(1)
式中:为共享特征提取器;为分类器;为交叉熵损失函数;为源域和目标域特征之间的分布距离。然而,上述损失项主要关注于学习所有域的共享域不变表示,而没有考虑特定域类之间决策边界的问题,且相较于MMD,多核利用核的线性组合来加强MMD的效果,可以达到一个最优的、合理的核选择。由此,本文提出了具有多核MMD的MSFAN故障诊断网络模型以解决源域和目标域样本特征之间的域适应问题,进而解决目标域样本的标定任务。
3 MFSAN模型
为解决多源域中所学共享域不变表示的差异性,降低类边界附近的目标样本分类错误,提出了具有多核MMD的MFSAN网络模型,MFSAN主要由3个子部分组成:共享特征提取、深度域适应、特定领域分类,MFSAN网络模型如图1所示。

图1 基于MK-MMD的MSFAN网络模型示意图
3.1 共享特征提取
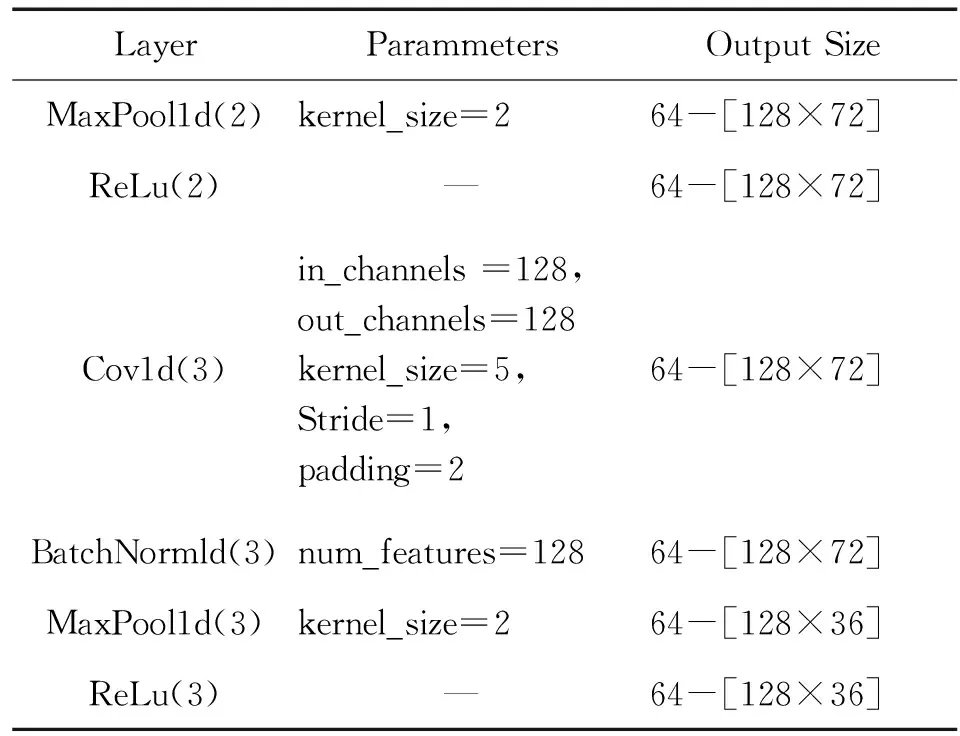
共享特征提取器通过域共享的CNN将源域与目标域的原始特征空间映射到共享特征空间,提取领域共享特征表示。域共享的CNN通常由卷积层、池化层和全连接层组成,网络结构如表1所示。

表1 域共享的CNN网络结构
续表(表1)


(2)

(3)
BN层通过批规范化加速神经网络训练,使模型训练更加稳定,避免了人工适应调整网络超参数。使用最大池化的降采样方式,将可转移特征划分为几个不重叠的段,并返回最大的段,减少了训练参数数量,有效克服了过拟合问题,ReLu增加了网络模型各层之间的非线性关系。
3.2 深度域适应
为提取源域和目标域在特定域的特征表示,首先通过共享特征提取器提取源域和目标域的共享特征。其次,共享特征通过个非共享的特定域网络将每对源域和目标域数据映射到一个特定的特征空间以提取源域和目标域的特定特征。然而,每对源域和目标域数据映射到多个不同特征空间时存在分布差异。因此,通过深度域适应的方式对齐特定域的特征分布以学习多个域不变表示。
深度域适应的目标是学习域不变表示,通过距离度量方式来减小不同域之间的特征分布差异。MMD是度量2个数据集之间特征分布差异的非参数距离度量,给出源域和目标域,和分别为源域和目标域的样本集,将源域和目标域的样本经过特征映射到希尔伯特空间中,比较经验核平均嵌入之间的平方距离评估MMD的数值。
(4)


(5)
3.3 特定领域分类器
MFSAN中的特定域分类器C为softmax分类器,通过特定域特征提取器和分类器的迭代训练,将交叉熵损失函数作为分类器的损失函数。对于个源域知识,分别计算其交叉熵分类损失,并进行求和得到式(6):

(6)
式中:为源域分类损失;为共享特征提取器;为特定域特征提取器;为特定域分类器;为交叉熵损失函数。
其次,对于目标域类边界附近的样本,不同的领域分类器将可能产生分类错误。因此,提出了一种组合多源分类器,计算所有分类器输出的平均,最小化组合多源分类器以实现特定域的分类器对齐。

(7)
因此,总的损失项由3部分组成:、、,其中最小化以减小源域分类损失,最小化以减小源域和目标域的特征分布差异来学习域不变表示,最小化来减小分类器之间的差异以正确分类类边界附近的样本。
=++
(8)

(9)
4 仿真试验及对比分析
本试验运行环境为Pycharm,处理器为Intel(R) Core(TM) i7-10870H CPU@2.20 GHz,内存为64 G,运行Windows 10操作系统,通过Pytorch框架实现本文所提出算法,其中Pytorch=1.11.0,python=3.9.12。
4.1 数据集选取及试验配置
由于真实情况下航空武器舵机轴承数据具有小样本和标签不完备的特点,无法训练出可靠的故障诊断模型,而来自实验室的轴承数据包含了与航空武器舵机轴承相关的故障诊断知识。因此,本文使用来自凯斯西储大学(CWRU)和辛辛那提大学(IMS)的滚动轴承数据集来模拟完成航空武器舵机轴承数据的标定任务。CWRU数据集包含4种故障状态,即正常(N)、内圈故障(IR)、滚珠故障(BR)和外圈故障(OR),该数据集通过放置在电机驱动端和风扇驱动端的加速计获取,采样频率分别为12 kHz、48 kHz,实验分别在无负载情况下(转速约为1 797 r/min)、负载为1 HP(转速约为1 772 r/min)、负载为2HP(转速约为1 750 r/min)、负载为3 HP(转速约为1 730 r/min)的条件下进行,在故障直径分别为0.007、0.014、0.021英寸时采集故障数据。IMS数据集通过对轴承施加6 000磅的径向载荷,转速为2 000 r/min,使用安装在轴承壳上的高灵敏度石英ICP加速度计获取IMS数据集,采样率设置为20 kHz。


表2 试验所用数据集分布
为实现航空武器不同舵机轴承在新环境下的状态识别,提高故障诊断能力。根据表2,选取CWRU中电机驱动端(DE)数据和风扇驱动端数据(FE)分别作为深度迁移学习中的源域和目标域,进行相同实验室数据集下不同工况(不同负载力矩条件)、不同设备间(不同舵机)的滚动轴承知识迁移试验。同时,分别选取CWRU中的DE、FE数据集作为源域,MSI数据集作为目标域,进行不同实验室数据集的迁移试验,构建的多源域知识迁移试验的数据集如表3所示。
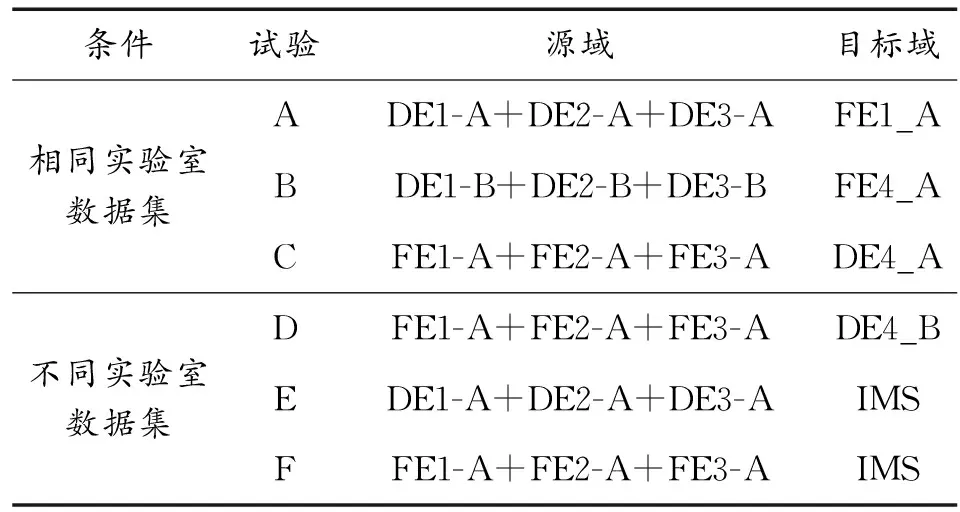
表3 多源域知识迁移试验的数据集
试验中MFSAN模型每次训练的批次大小设置为64,迭代次数为2 000次,在模型训练期间,采用SGD来调节学习率,动量为0.9,其他参数设置如式(9)。
4.2 试验结果
利用本文所提方法开展上述6个试验任务,引入分布随机邻接嵌入对网络最后一层特征进行非线性降维,实现特征分布可视化,从而更加直观的体现轴承故障数据的分类程度。对比图2(a)和图2(b),图2(a)将从电机驱动端以转速分别为1 797+1 772+1 750 r/min采集到的源域数据集学习到的知识迁移到风扇驱动端以转速为1 797 r/min采集到的的目标域数据集,从图中可以看出,在不同设备间、相同工况下的多源域迁移学习表现不错;而图2(b)为以转速为1 730 r/min,从风扇驱动端采集到的目标域数据集,可以看出图2(b)中的一小部分滚珠故障与内圈故障相混淆,体现了不同设备间、不同工况下进行迁移学习中类边界分类的模糊性。图2(c)和图2(d)为以风扇驱动端采集到的数据集作为源域数据,以电机驱动端采集到的数据作为目标域数据,可以看出在该类试验的迁移效果较好。而反观图2(f)和图2(f),其中,图2(e)中的源域数据来自(d)(e),图2(f)中的源域数据来自FE,无差别的对目标域(IMS)数据集进行知识迁移的结果却不同,结合图2(c)和图2(d)可知,(f)(e)中的包含的数据信息更加丰富。
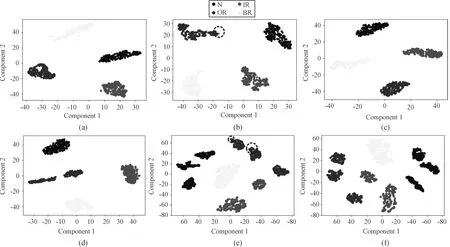
图2 不同试验下的特征图
图3表示了本文所提方法在上述不同试验下的测试平均损失和精度,从图3中可以看出试验B和试验E中的分类精度较低,其他试验下的故障分类精度都满足100%的正确率。从图3中的平均测试损失可以看出,试验A的平均测试损失低于试验B,试验C的平均测试损失低于试验D,反映了不同工况对试验的影响程度较大,从侧面体现了源域数据和目标域数据之间的相关性将影响故障分类程度,从整体上来说,本文所提模型在不同设备间、不同工况下进行知识迁移的准确性较高。

图3 不同试验下的测试平均损失和精度
为体现复杂工况下单源机器无法提供足够的诊断知识,而多源机器能为迁移学习提供更加丰富的信息。本文设置了2个试验组以实现单源条件下对目标域振动数据的状态识别。试验一:将DE端故障深度为0.007英寸,转速为1 750 r/min的有标签振动数据作为源域数据集,IMS无标签振动数据作为目标域数据集(图4)。试验二:将FE端故障深度为0.007英寸,转速为1 750 r/min的振动数据作为源域数据集,IMS无标签振动数据作为目标域数据集(图5)。
通过试验可知,试验一的测试平均损失为0.441 8,精度为85%;试验二的测试平均损失为0.531 0,精度为83%,结合图4和图5发现,相较于上文的多源域迁移学习试验,试验一和试验二对目标域的故障诊断准确率低。这是因为多源域不仅提供了更加丰富的知识,同时,通过不同特定域特征分类器对齐目标域类边界样本的分类差异。与上文相比,该试验方案下的故障诊断精度较低,但在一定程度上,可以更有力的说明多源域相较于单源域在解决域适应问题上具有优越性。
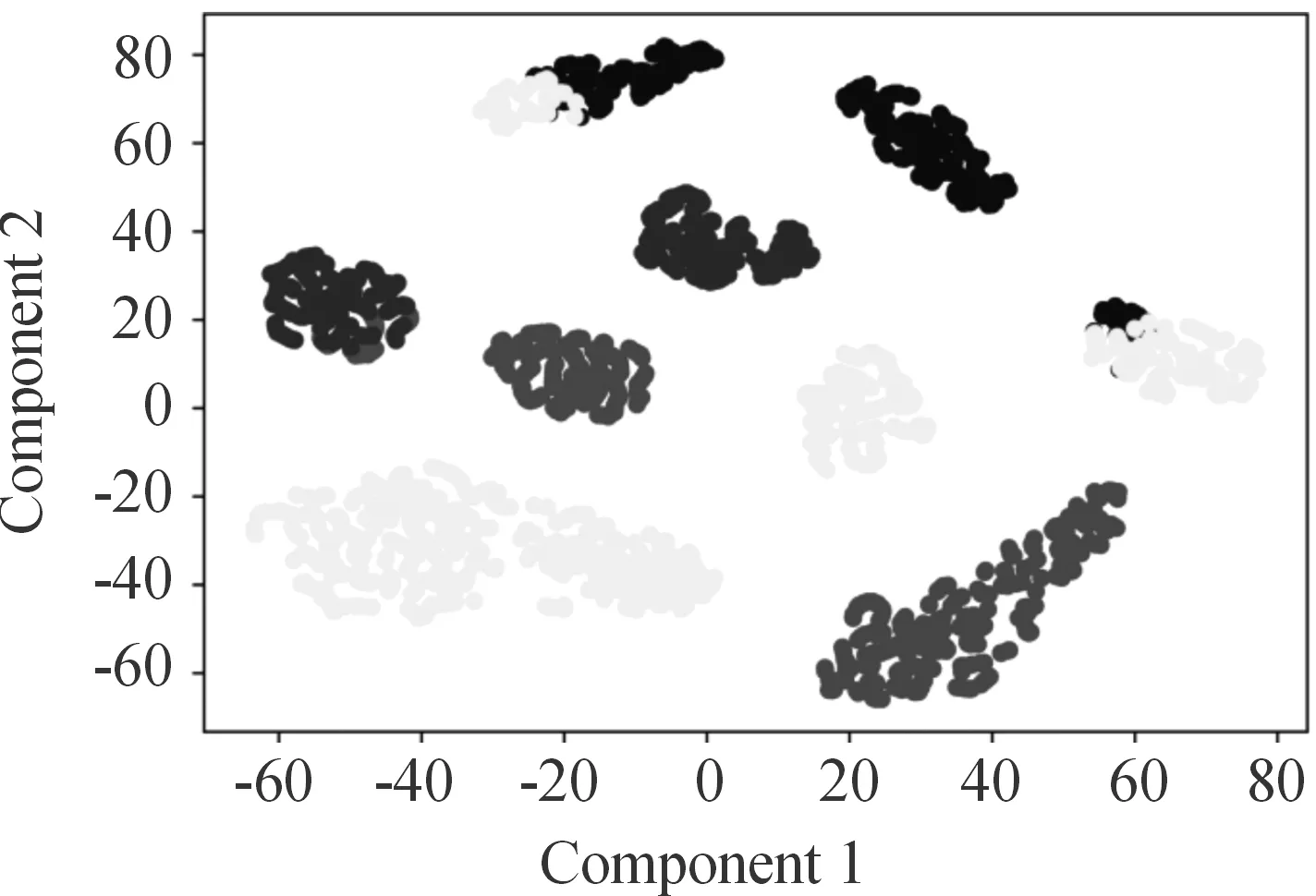
图4 试验一特征图
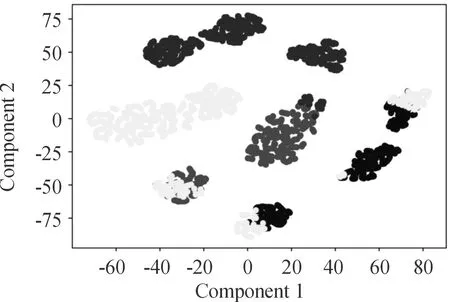
图5 试验二特征图
4.3 试验分析
为评估本文所提多源域深度迁移学习方法的可行性,提出2种验证策略来体现所提方法的优越性。
1) MK-MMD作为度量2个数据集之间特征分布差异的非参数距离度量方式,通过距离度量方式来减小不同域之间的分布差异,从而提高轴承的故障诊断精度,为验证MK-MMD的有效性,设置了3种对比方式:① 仅考虑clst误差项的MFSAN网络结构;② 仅考虑MMD误差项的MFSAN网络结构;③ 同时考虑MK-MMD和clst误差项的MFSAN网络结构。
从表4可以看出,MFSAN较之于未考虑最大均值误差项的MFSAN与未考虑特定域之间类边界附近样本分类损失项的MFSAN在各试验下具有更高的分类精度,证明了考虑特定域类边界来缩小所有分类器之间的差距可以帮助每个分类器从其他分类器学习知识,以及使用MK-MMD通过多核的线性组合得到最优核以减小源域和目标域之间特征分布差异的有效性。
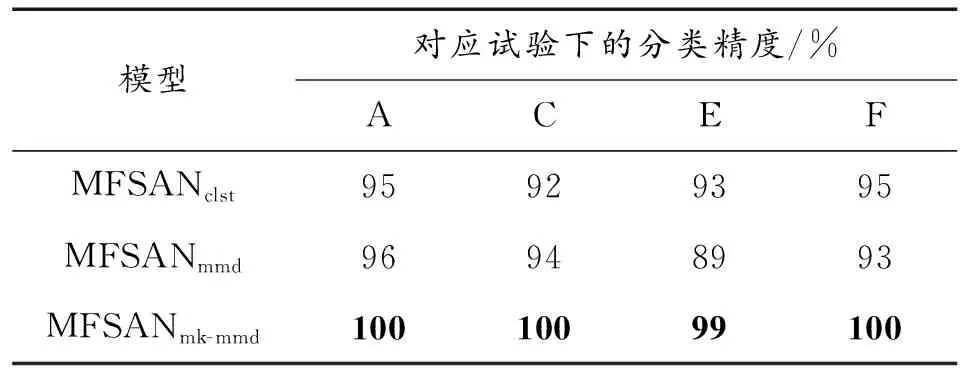
表4 各试验下的轴承数据分类精度性能对比
2) 为验证本文所提方法的有效性,分别采用4种诊断方法与本文所提方法进行单源域迁移学习模型效果对比,即WDCNN、Alxnet、Rexnet18、MLP等。试验参数设置同上(训练批次大小、迭代次数、SGD参数设置),且网络训练过程中,以源域数据作为训练集,目标域数据作为测试集进行训练,仅考虑分类损失项作为反向传播的依据,同时使用相同数据集进行单源域迁移学习训练,训练任务设置为DE1_A→IMS、IMS→DE1_A。
从表5可以看出,现有的故障诊断模型在进行单源域知识迁移方面较上文中利用MFSAN进行迁移学习的方法故障诊断精度低,体现了多源域迁移学习较单源域迁移学习在知识层面上更加丰富;且相比于传统的机器学习、深度学习方法故障识别率更高,证明了训练集和测试集数据分布差异过大将导致诊断精度过低的事实,进一步体现了深度迁移学习中,域适应问题的重要性。
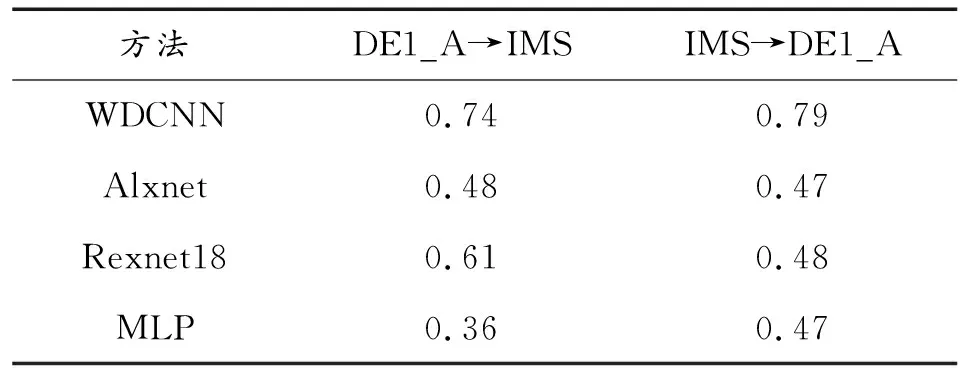
表5 单源域迁移学习模型对比
5 结论
提出了基于MK-MMD的多源域迁移学习方法,在飞行器飞行过程中,通过布置在舵机上的传感器在线获取可以表征舵机故障状态的特征数据,对处于不同负载力矩条件下的不同舵机轴承的已有多源域数据信息进行高维特征提取,并将学习到的源域知识迁移到新环境下舵机轴承的故障诊断中,可解决跨域迁移学习存在的域适应问题,高效地对目标域中的未标定数据进行标定,保证航空武器系统的正常运行。