多通道特征融合卷积神经网络的齿轮箱故障诊断
2022-10-12张名武李舜酩程龙欢
张名武,李舜酩,2,程龙欢
(1.南京航空航天大学 能源与动力学院, 南京 210016;2.南通理工学院 汽车工程学院, 江苏 南通 226002)
0 引言
齿轮箱作为机械传动系统的重要核心部件,越来越受到我国科技部门的重视[1],在日常机械设备上也得到广泛应用。齿轮箱中的齿轮、轴承等部件因为其运转时间长、工作环境复杂,加之受到润滑、温度等因素影响,齿轮会发生断齿、磨损、点蚀故障,轴承的内圈、外圈和滚动体也会损坏。齿轮箱长时间工作运转会使得损伤不断积累,当发生故障时,导致机械设备的损坏,甚至诱发工业事故,造成巨大的经济损失和人员伤亡。
齿轮箱故障诊断流程通常包括3个部分,信号获取及处理[2]、故障特征提取[3]和故障类型诊断。齿轮箱的振动信号包含故障件在运行状况下的大量特征,经常作为不同故障诊断模型的输入信息。传统的故障特征提取方法[4]依赖于人工的经验且提取的特征效果有时并不明显,深度学习和人工神经网络的提出有效地解决了传统齿轮箱故障诊断方法的弊端。卷积神经网络(convolutional neural network,CNN)作为典型的深度神经网络,凭借较强的特征提取能力[5]被广泛应用于图像识别、语音识别和目标跟踪等方面,也有学者成功地将卷积神经网络应用在机械故障诊断中。基于信号处理技术和CNN模型相结合的故障诊断方法[6-7],诊断效果好坏依赖信号处理特征的质量,增加了故障分析的不确定性,降低了深度学习的智能性。改造CNN模型直接提取振动信号的特征能更加准确地反映机械设备的健康状态[8-9],但是CNN模型直接对一维振动信号进行处理分析时,原始序列的空间相关性会被破坏,故障的相关信息会缺失。此外,使用单通道CNN进行故障诊断,虽然可以减少网络参数,但没有充分发挥CNN提取信号特征的能力,不能充分挖掘设备故障特征信息。
针对上述问题,本文尝试建立一种MC-FFCNN的模型并将其应用在齿轮箱故障诊断上,该方法不仅完全不依赖于人工特征提取和专家知识,而且不同转速下的故障诊断准确率均较高,比未融合的数据网络更高。
1 格拉米角场数据增维
在智能故障诊断方面,如果能够将一维序列数据转化为二维数据(灰度图像),那么可以起到很好的故障诊断效果[10]。目前,转换为二维数据的主要方法有格拉米角场方法等。本文使用格拉米角场进行数据增维,其原理简单且计算量较小。
1.1 格拉米角场原理
格拉米角场将一维序列数据缩放,再从直角坐标系统转换到极坐标系统,然后考虑不同点之间的角度和或者角度差以识别不同时间点的时间相关性。角度和、角度差对像素值数据的规律性影响几乎一样,本文选择角度和(gramian angular summation field,GASF)做角度变换。
1.2 格拉米角场的实现步骤
格拉米角场的实现步骤如图1所示。首先,对一维序列数据做归一化处理,利用minmax归一化方法将一维数据映射到[0,1];其次,将缩放后的时间序列数据在极坐标中转换,即将数值看作夹角余弦值;然后,对在极坐标中转换后的角度数据做角度和变换。如果原始时间序列数据的长度为2n,经过GASF转换后,得到了尺寸为[2n,2n]的矩阵;接着采用分段聚合近似(piecewise aggregation approximation,PAA)的方法将序列长度减小,平均将每个段内的子序列压缩为一个数值。
经过分块后的矩阵减少了计算量,并且保留了原有的信号特征。这些矩阵数据的数值在[-1,1]之间,可以作为振动故障信号的灰度图数据。

图1 格拉米角场增维
2 MC-FFCNN智能故障诊断算法
MC-FFCNN网络属于卷积神经网络的一种,其结构包含卷积层、池化层、全连接层以及Softmax分类层,在最后一层池化层和全连接层间加入融合层。MC-FFCNN智能故障诊断算法的主要结构包括2个部分:信号扩维和神经网络诊断模型。
2.1 信号扩维
多个传感器获取的故障数据,采用格拉米角场扩维成二维矩阵数据,将这些数据作为灰度图的像素值,从多个通道输入到神经网络中。多传感器采集的振动信号输入模型如图2所示。

图2 多传感器采集的信号输入模型
2.2 MC-FFCNN故障诊断模型
MC-FFCNN故障诊断模型包含3层卷积层、3层池化层、1层融合层,最后用全连接层以及Softmax回归对融合结果进行故障分类。
3层卷积层以滑动窗口的形式提取原始数据特征,卷积核以一定规则与图像上相应区域的数据做卷积运算,当所有区域计算完成后,所有数据的特征都被提取出来。3层最大池化层可以保留计算目标的关键信息,去除冗余信息,降低神经网络的计算量。最后一层池化层提取灰度图特征后,在融合层中采用加权融合方法融合特征信息。对于振动信号的二维数组,由于各个通道提取的特征图存在差异,每个通道对特征图的贡献度也不一样,采用信号峭度值来衡量每个通道的贡献度及权重。全连接层是将融合层的结果进行整合处理,每个连接可以有不同的权重参数。它的作用是将前面卷积层和池化层提取的目标关键特征进行整合。分类器Softmax回归是一种指数函数,可以实现归一化。因为它以概率的形式展现,所以针对不同的故障类型,可以达到较好的分类效果。决定卷积神经网络模型迭代计算参数更新快慢的是激活函数。常用的激活函数有Sigmoid函数、tanh函数、ReLu函数和Leaky ReLu函数。Sigmoid函数是便于求导的平滑函数,但是运算耗时间。Tanh函数解决了Sigmoid函数的非zero-centered问题,但是它存在梯度消失和幂运算的问题。ReLu函数收敛速度比Sigmoid和tanh函数快,计算难度低,不需要进行指数运算。Leaky ReLu函数解决了ReLu函数带来的神经坏死的问题,但其表现并不稳定。本研究中选择ReLu函数,所使用的卷积神经网络的拓扑结构如图3所示,卷积神经网络参数如表1所示。

图3 卷积神经网络拓扑结构

表1 卷积神经网络参数
其中,c是故障的数量,m是通道数,F是卷积核的数量,f1是卷积核的形状,s是步长,P是池化层的形状,W1,W2和W3分别是各个通道的权重,Kp表示全连接层层数。
数据融合[11-12]包含了3种融合方式,分别是数据级融合方式、特征级融合方式和决策级融合方式。本文在融合层使用了特征融合的方法。多通道的特征融合方式如图4所示。相比于单通道的振动信号处理效果,多通道的灰度图融合可以全面地表达故障特征。融合后的特征图每个位置的像素值为3个通道融合前的特征图相应位置的像素值与其分配权重乘积之和。

图4 多通道的特征融合方式
3 试验
本文试验中锥齿轮箱传动试验台如图5所示。传感器布置方式如图6所示,3个接触式加速度传感器获取输入轴、中间轴、输出轴的振动信号。

图5 锥齿轮箱传动试验台

图6 锥齿轮箱传感器布置方案
3.1 故障标签
选取的数据有10种,分别用C1—C10表示,10种数据包括齿轮箱正常、内圈裂纹、外圈裂纹、齿轮断齿、齿轮点蚀(4个)、齿轮点蚀(6个)、齿轮裂纹(0.25倍齿厚)、齿轮裂纹(0.5倍齿厚)、齿轮磨损(0.4倍齿厚)和齿轮磨损(0.8倍齿厚)。
3.2 参数选取
学习率是训练网络的重要参数,训练刚开始时,使用较大的学习率可以加快训练速度,训练到达一定程度后使用较小的学习率可以提高精度。设定初始学习率为0.001,当迭代次数大于12时,测试的准确率增长变得缓慢,为了提高测试的精度,将学习率调低至0.000 8。当迭代次数超过30时,网络的测试准确率已经稳定。设定每一次训练测试的迭代次数为30次,在迭代次数12及以下时,学习率为0.001,在13次到30次之间,学习率为0.000 8。
峭度值对大幅值敏感,可以作为一个权重指标,融合层的权重可以根据每个传感器的原始数据的峭度值特征而确定。
3.3 故障诊断结果
选取试验中700、900、1 100、1 300 r/min的试验数据,将图像数据导入搭建的卷积神经网络融合模型和未融合的卷积神经网络模型,可以得到各转速下的测试准确率,如表2所示。
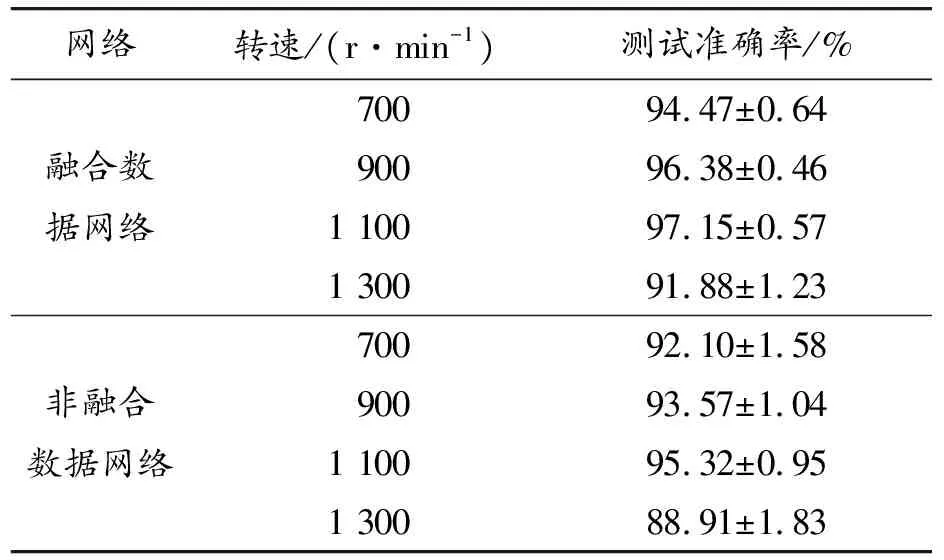
表2 不同网络各转速下的诊断准确率
在同样的转速数据集中,融合数据的网络诊断准确率比非融合数据网络高,且不同转速的故障诊断的准确率波动也较小,这表明本文提出的融合数据网络的优越性。另外,同一网络诊断准确率最好的是1 100 r/min,最差的是1 300 r/min,另外2种转速的准确率次之。这是因为电机的额定转速是1 500 r/min,1 300 r/min是最接近的,对数据的采集影响较大,转速太低获取的数据也有一定影响。
故障准确率虽然可以反映模型的整体诊断效果,但是不能反映每种故障的诊断情况。混淆矩阵可以将不同类型的故障的诊断效果在一张图中表示出来。图7是转速为700 r/min时融合模型的混淆矩阵,700 r/min的C2的真实标签和预测标签相似度最高,可达0.97。C1的真实标签和预测标签相似度最低,只有0.87,预测的标签存在误判为C4、C5、C6、C8的情况。图8是转速为700 r/min时未融合模型的混淆矩阵,其网络诊断的效果要差一些。在700 r/min转速下,未融合神经网络的C2、C5、C6、C7、C8和C10的诊断准确率均低于融合神经网络的诊断准确率。

图7 700 r/min转速下融合模型的混淆矩阵

图8 700 r/min转速下未融合模型的混淆矩阵
采用故障分类图可以直观地展现单个故障间的聚类情况以及各个故障间的分类情况。700 r/min 转速下融合数据与未融合数据结果的故障分类图如图9和图10所示。
图9和图10的横纵坐标都是表示降维到二维的数据特征,不同的颜色代表不同类别的故障标签,每一种颜色可以清晰地展现单个故障内的聚类程度,不同颜色间也可以明确地区分不同故障间的差异。

图9 700 r/min转速下融合模型的聚类图
在700 r/min转速下,在未融合数据集的分类结果中,C1和C8有较多的重合,这也间接说明了C1和C8的故障诊断准确率低,另外,C3和C7,C4和C6有较少的交叉,这也导致了这些标签间的匹配问题。在融合数据集的分类结果中,除了C2和C5之间会有部分的交叉影响,其他的故障标签之间都是有某1个或2个样本的跳动,对故障诊断的结果影响很小。
4 结论
1) 对原始振动信号采用了格拉米角场增维处理,处理后的矩阵元素数值均为0到1之间的数,不仅保持了原有信号的时序性,还可以加快训练网络的收敛性。
2) 采用了多通道的卷积神经网络模型,克服了单个传感器信号不能全面反映故障特征的弊端,将多个信号通过图像转换后的图片作为卷积融合神经网络的输入,有效提高了故障诊断的准确率。
3) 该模型充分利用了CNN的特征提取能力,能够准确识别齿轮箱数据的10种不同故障状态,相较于单通道CNN的故障诊断方法,本文提出的基于MC-FFCNN模型的齿轮箱故障诊断方法准确率更高。
下一步的研究重点为研究模型参数对诊断结果的影响,提高算法的运算效率。