ISO 362-1:2007中M1类车加速方法研究
2022-10-12张子文瑞1
张子文,周 苏,宋 瑞1,
(1.长安大学,西安 710064;2.中汽研汽车检验中心(广州)有限公司,广州 511300)
2020年汽车工业蓝皮书的发展报告指出,从2015年起,我国乘用车年销量超过2 000万辆。然而,随着上路车辆增多而产生的汽车噪声问题却日益严重,在城区行驶而造成的车辆噪音对于行人以及旁边的店铺、居民楼、小区、学校等区域的影响尤为明显。据调查,2020年生态环境部门接到公众举报44.1万件,其中噪声扰民问题占41.2%,而在声源影响比例中,交通噪声占了21.7%,通过检测昼间道路交通噪声数据,发现城市昼间交通噪声等效声级平均值高达66.6 dB(A)。
目前,我国实施的针对汽车加速行驶噪声的测试标准GB 1495—2002《汽车加速行驶车外噪声限制及测量方法》已发布了近20年,其中的限值和方法已经无法很好地满足解决目前道路噪声问题的需求。20世纪末,在欧洲各个国家的共同努力下,国际标准化组织ISO发行了新的测试标准ISO 362:1998,并于2001年在欧洲经济委员会的会议上纳入了欧洲ECE标准体系。随后几年持续修改完善,最终形成了目前国外采用实施的标准ISO362-1:2007以及ECE的R51。我国在2009年时也起草了参考上述国外标准的GB 1495—20XX国内强制性检验标准,然而受各方面原因的限制,直至目前,此标准仍未正式颁布实施。尽管国内目前对于测试新方法的需求不高,但基于道路交通噪声污染的日益严重以及老旧的噪声测试标准,新方法的推行是必然趋势。另一方面,海外市场也在我国汽车经济中占据越来越重要的地位,据调查,2020年,汽车企业的全年出口达到了99.49万辆,其中乘用车占76.34%,同比增长4.79%。国内车辆需要出口海外市场时,ISO以及ECE系列标准仍是认证程序的主要测试依据。因此,掌握新的测试流程、优化试验方法对于标准的实施和认证企业的工作顺利开展将有与时俱进的现实意义。
在ISO 362-1:2007和ECE R51发布后,国内诸多学者发表了一些针对新标准的相关研究成果。邱彬等针对ISO 362-1:2007相对于ISO 362-1:1998的差异进行了分析和测试结果对比;谢东明等则根据ISO 362-1:2007和ECE R51的差异进行了发展动向分析,随后通过测试试验,讨论了关于新标准中几个不明确的地方,指出了挡位选择、混合动力车辆的额定功率选定方法等关键点;彭伟强等更是进一步基于ECE R51进行了多工况的噪声评价方法试验研究,探究了ASEP评价方法对国内汽车产品的影响。然而,新标准对于试验方法中,试验入线时预加速的起始速度和预加速距离的确定方法还未明确,这使得试验难度和复杂程度明显提高,虽然在文献[11]中提出了根据样车加速曲线进行预加速参数人工提取的方法,成功提取了加速参数,但此方法需要检验员针对曲线进行大量的人工操作、估算以及计算,比较复杂、不确定性高,可复现效率低,不利于测试的快速开展,时间和人工成本较高,对于方法的准确度也并未有进一步定量。并且基于加速测试曲线推导预加速参数时,由于曲线的初速度和计算得到的初速度不一致会导致预加速距离同时产生误差,而目前并未有文献考虑了预加速时初速度和距离之间的耦合关系。本文将针对M1类车辆,提出一种基于Simulink的预加速参数确定方法,通过对于车辆加速曲线的特征提取分析,建立计算模型,完成对于预加速参数的模拟计算,并通过试验验证了此方法的准确度,符合标准要求。此方法大大降低了确定预加速参数时的人工和时间成本,简化了试验的复杂程度,降低了企业和第三方认证机构针对噪声测试新方法的测试难度,有利于新噪声测试实验方法的新标准推广,具有一定的指引价值。
1 测试的关键加速参数
ISO 362-1:2007中,测试分为加速通过试验和匀速通过试验,测试场地如图1所示。在加速试验中,要求车辆以一定的速度进入’线,然后将油门达到最大开度,即加速踏板踩到尽头,直至通过’线,且在整个行驶过程中车辆中心保持对准’线,另外在通过’线时根据车型对于车速也有相应要求。而对于M1类车辆,根据标准要求,当车辆参考点到达’线时,速度需为V=50±1 km/h,因此,在’线处的入线速度需要根据车辆的加速性能和加速距离进行反推确定。而进线速度的大小直接决定了车辆的参考点到达’线时的速度,从而对试验结果产生直接的影响,所以对于加速参数的确定是获取准确的测量结果的关键。
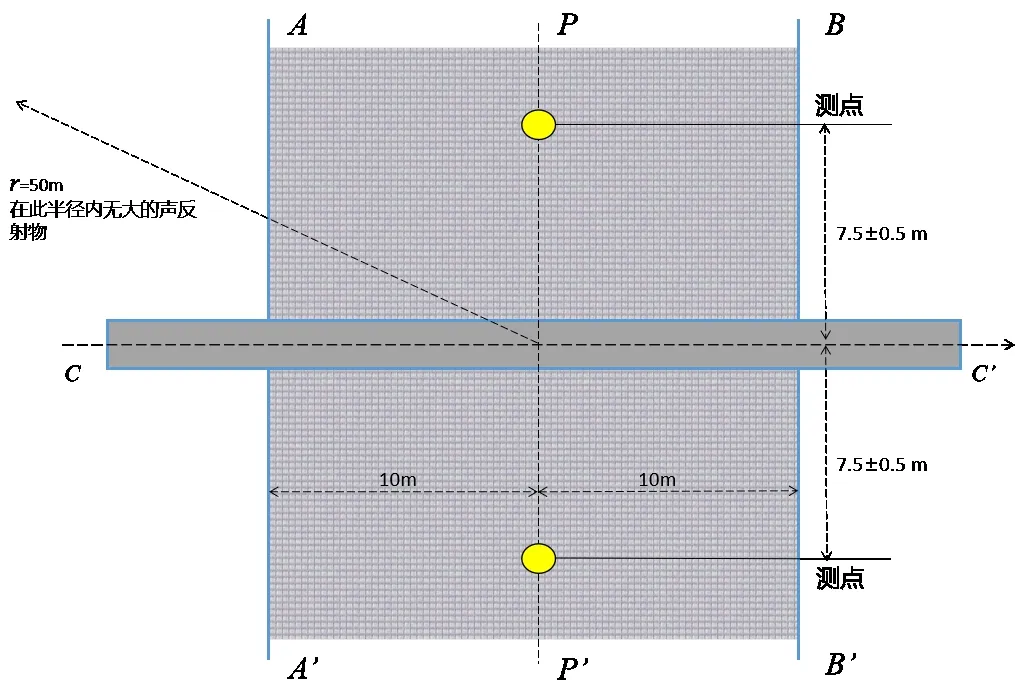
图1 标准测试场地规定
针对M1类车辆,由于车辆加速踏板踩下到汽车建立稳定的加速度之间有一定延迟,此延迟造成了入线速度并不能单纯依靠测定的加速度来进行简单计算得到,不考虑延迟的影响而直接选取加速度值将会无法在车辆到达’线处得到满意的车速。
标准规定,对于入线的方法有两种:一是可以在’线之前选取一定的预加速距离,通过这段距离来提供给车辆充足的加速延迟时间,但当测试车辆为自动挡,且无法避免使用城市工况中明显不用的挡位时,不可以使用这种方法;二是可以直接提高车辆到达参考点进入’线时的速度,使即使存在加速延迟也能够在到达’线时车速满足标准要求。
以上两种方法都需要对车辆的加速延迟特性进行分析、总结、计算,将基于多次试验下样车的加速速度曲线,通过Simulink建立数学计算模型,进而考虑预加速速度和距离参数耦合的影响,得到两种方法的入线参数,提高了结果的准确度,降低了参数确定的人工计算成本和时间成本。
2 Simulink模型
在踩下汽车加速踏板,加速延迟后到加速至当前挡位速度峰值前,存在一段稳定加速度的加速过程,在此过程中,假设汽车做匀加速运动,可以得到:

式中:V为通过’线时的车速,为50 km/h;V为加速度刚开始稳定时的车速;a为车辆到达匀加速后的车辆加速度;是标准规定的从’线到’线的距离,取值为10 m。
接下来,将分别对两种方法进行讨论。
方法1:即在’线前预留一定加速距离进行预加速,到达’线时获得稳定加速度。这种情况可以用下列计算公式表达:


式中:V为车辆参考点到达’线时的车速;为驾驶员踩下加速踏板时的车速;Δ为车辆在加速到达稳定前车速的变化量;为驾驶员踩下加速踏板时车辆距离’线的距离;()为当车速=时,驾驶员踩下加速踏板时到车辆加速度稳定前的行驶距离。结合单位换算和上面的公式可得:

方法2:固定踩下踏板的位置为’线,即在’线到’线的10 m距离内,包含了汽车驾驶员踩下加速踏板时到车辆加速度稳定前的车辆行驶距离,可得:

通过速度、加速度以及行驶距离的关系,可以进一步得知:
式中:为驾驶员踩下加速踏板时刻;t为到达稳定的加速踏板时刻。
基于上述的推导,建立Simulink模型如图2所示。
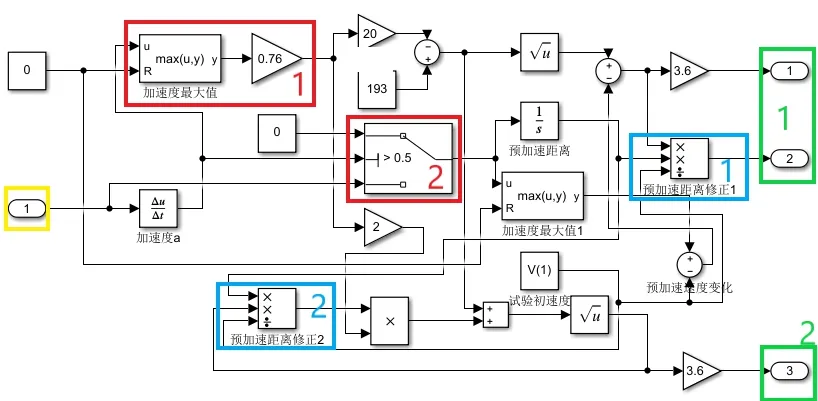
图2 Simulink详细计算模型
图2中,黄框为inport端口,此模块输入车辆的加速曲线,根据标准和一般汽车加速的表现,若使汽车在’线到达50 km/h,试验的加速曲线取起始速度为45~47 km/h之间,为计算得到在加速至50 km/h期间更准确的车辆加速度峰值,加速曲线不宜太短或太长,终点视情况选取。图3为典型的某手动挡M1型汽车加速曲线。红框1表示由峰值加速度通过加权系数相乘得到名义稳定加速度值,这是由于实际情况下加速度是一个浮动值,加速度峰值需要一定比例的缩小才能得到名义稳定加速度值。本文通过稳定段加速度求平均值的方法,对不同车型进行了大量的实车试验、结果比对、数据验证,最终得出在此模型中的加权系数取值0.76,试验使用VBOX道路测试系统进行,速度精度为±0.1 km/h。图4为设备及试验照片。
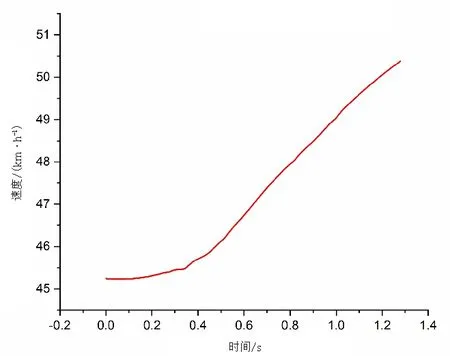
图3 某车型典型加速速度-时间曲线

图4 设备安装及加速试验
同样地,在红框2中,通过条件模块对速度曲线的加速延迟段和稳定加速段进行了分离,取最低稳定加速度阈值为0.5 m/s;蓝框1和蓝框2则是考虑了计算得到的预加速距离和预加速速度之间的耦合关系,对前者在方法1和方法2中都进行了修正,修正公式如下:

式中:为加速试验曲线的初始速度。绿框1中,包含了两个输出结果,分别是方法1中的预加速所采用的起始速度和预加速时车辆距离’线的距离(),而绿框2由于是固定参考点到达’线的加速方法,所以只输出一个起始速度结果。将计算过程封装成子系统后整个模型如图5所示。
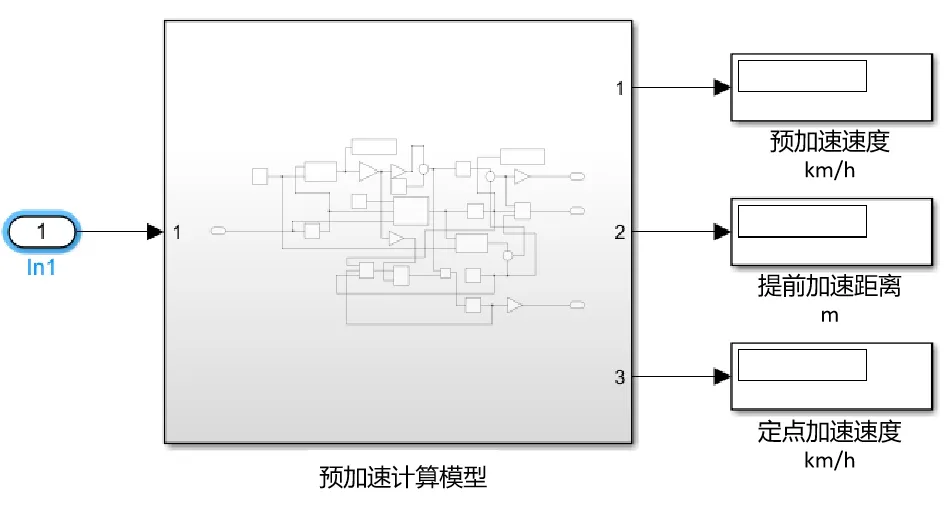
图5 预加速方法整体封装模型
3 模型验证和分析
本文模型针对M1类型汽车,为验证并分析模型精度,使用10台不完全生产自同一生产商且型号不同的样车,进行模拟ISO 362-1:2007中的车辆入线及通过’点的加速行驶车外噪声试验。由于需要得到样车在固定位置的速度,本文使用针对新方法的imc噪声测试系统,此系统可以通过将光触发器放置在位于车辆底部的车辆参考点处,光触发器输出触发信号至数采主机,同时在’线和’线地面处固定光反射器,从而能够将车辆通过特定位置的时刻记录下来并与数采主机的采集时间同步,结合采集到的车速,即可得到入线速度V以及通过速度V。加速验证试验方法如图6所示。
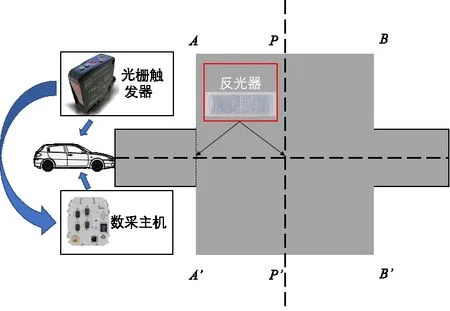
图6 加速验证试验方法
具体的模型验证和结果分析流程如图7所示。第1步,根据标准的要求选择合适的试验挡位,对于手动挡样车一般为3挡或4挡;第2步则通过加速试验得到样车的加速曲线,从而得到导入至Simulink模型中的速度时间矩阵;第3步为判断此样车是否可以进行方法1的试验,取决于样车是否为自动挡汽车,且在试验时无法避免使用城市工况中明显不用的挡位;第4步为模型根据输入的数组进行计算得到两种方法下的加速参数与();第5步为根据标准规定场地中进行试验,采集车辆的入线速度V以及通过速度V;最后则对所有样车的结果结合模型计算的加速参数进行分析验证。
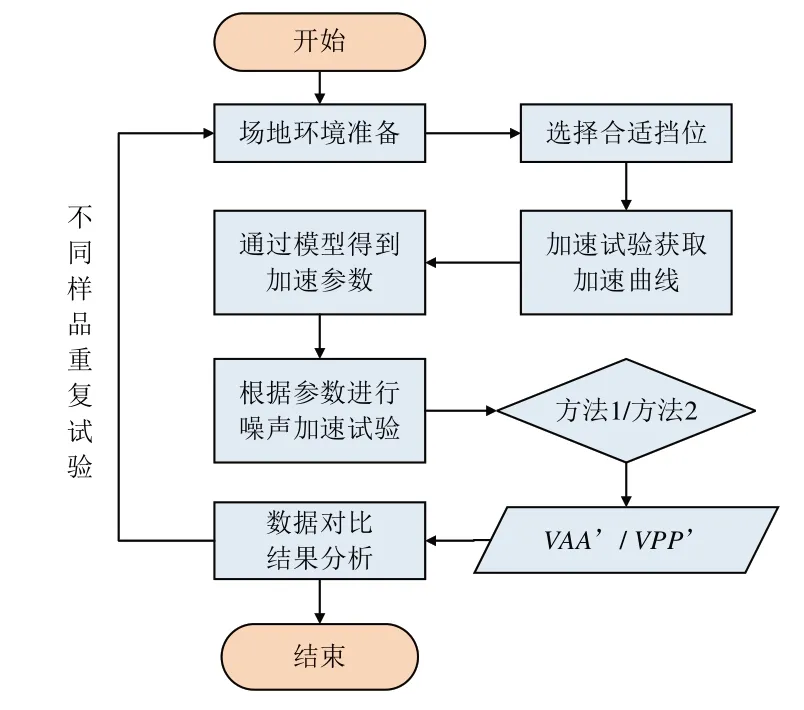
图7 模型验证流程
通过对比模型的模拟结果和10台样车的实际试验结果,得到表1。由表可知,10次试验里,共有8次试验的V值符合标准±1km/h的要求,2次不符合,其中一次为方法1的情况下偏低,一次为方法2的情况下偏高,整体符合率为80%。误差最低为0.2%,最高为2.6%,误差在1%以下的试验数量占比为50%。通过进一步统计误差值,结合平均值和均方差公式进行计算,可得误差值的平均值,即模型的平均准确度,为0.612 km/h,不大于1 km/h,均方差为0.418。
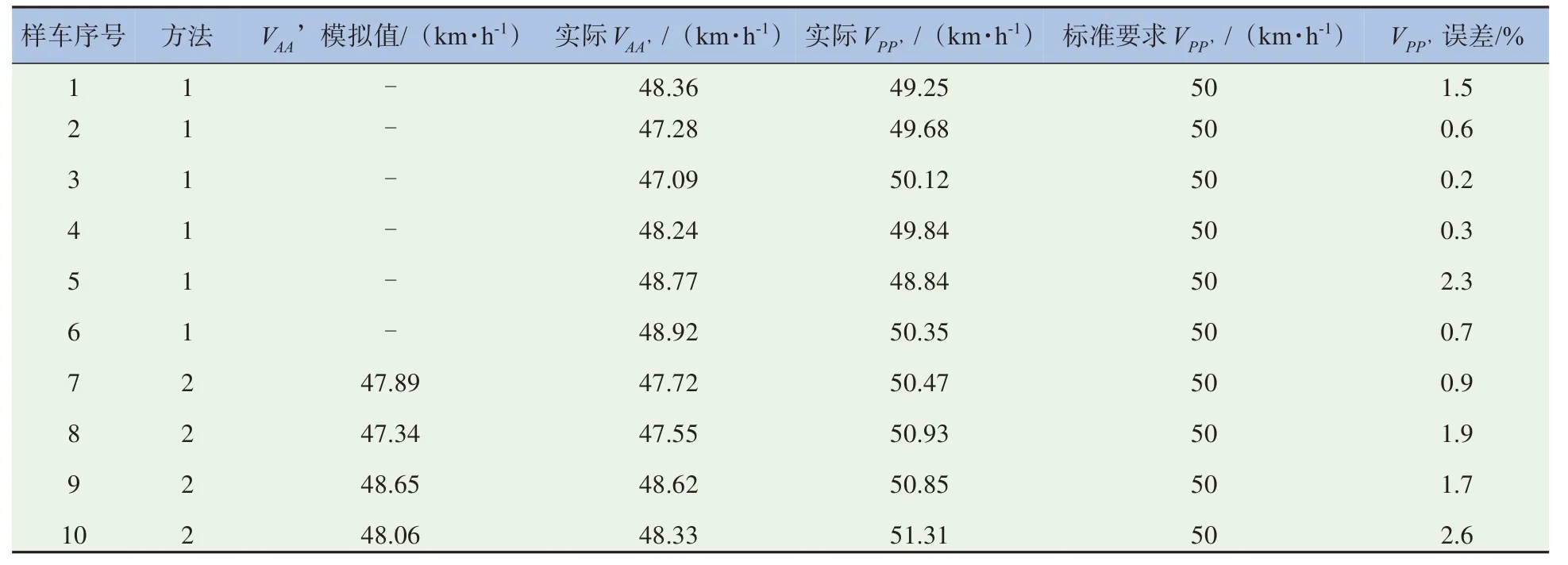
表1 噪声加速验证试验数据
通过对2次不符合试验的分析,发现模型不适用的原因为加速度加权参数的取值偏高或偏低了,由于该参数在模型中为基于加速曲线的特征参数,因此在本文中通过大量试验修正取为定值只能概括性描述大部分车辆,不一定适用所有车型,相信后期通过进一步的研究,可以针对此参数进行模型优化或不同车辆针对该参数值单独取值,从而得到更加可靠的模型,但此方法依旧具有高便利性、高效率以及对大部分车辆的高准确度。值得注意的是,在实际试验中,初始速度的精确度直接影响结果的准确性,因此,驾驶员是否拥有稳定的驾驶技术对于试验的重复性和可信度是十分重要的。
4 结论
本文以ISO 362-1:2007中对汽车的加速行驶车外噪声测试要求为出发点,针对M1类型汽车提出了一种加速参数确定的方法。该方法基于Simulink建立数学计算模型,可以依靠试验车辆的加速曲线进行预加速距离和预加速速度的模拟,模型的准确度经过试验的验证,符合率为80%,平均准确度为0.612 km/h,最低误差可达到0.2%。
通过实车试验验证可以得出,该模型能较高准确度地预测大部分M1类汽车的预加速距离和加速起始速度,从而使试验达到标准要求,同时降低了测试的难度和复杂程度,较大程度地节省了人力和时间成本,对于执行测试方具有一定的实用价值和参考意义。
