基于两轮自平衡机器人的反馈控制实训教学研究
2022-10-11李明飞黄湘超麦雨仑
李明飞,黄湘超,麦雨仑,尹 铭
(湖南工业职业技术学院,湖南 长沙,410208)
自动控制原理具有概念多、抽象、理论分析和数学比重大等特点。[1-2]因此,在教学过程中,特别是高职高专类课程教学过程中,学生对该门课程的抵触心理大,导致教学质量难以有效提升。
两轮自平衡机器人作为一个典型的欠驱动非线性控制系统,被用作反馈控制的实验平台,具有以下特征:(1)能通过简单的实验现象让学生理解开环控制与闭环控制的本质区别,满足实例教学法的基本要求;(2)该平台趣味性强,学生易上手,能有效激发学生的学习兴趣;(3)该平台涵盖传感器原理、单片机技术、直流电机驱动技术、数学建模、控制器仿真分析等多个知识点,可以持续激励培养学生运用理论知识解决工程应用问题的能力。[3]
1 实验平台
两轮自平衡机器人实验平台,包括传感器信号采集、直流电机驱动、STM32单片机控制器等硬件电路的实践教学部分,还包括机器人结构数学建模、PID控制器仿真分析、机器人控制实验验证等理论与实践相结合的教学环节。
1.1 硬件框图
两轮自平衡机器人硬件框图如图1所示。图中,以STM32单片机为核心,通过IIC协议读取MEMS传感器芯片MPU6050的数据。MPU6050与机器人的水平面刚性连接,因此可以得到机器人的倾角θ及角速度ω,并基于卡尔曼滤波算法处理机器人姿态检测过程中出现的噪声干扰和测量误差问题。[4-6]传感器采集到的姿态信息与指令信号之差作为PID控制器的误差比较信号,并输出一个与之相对应的PWM信号的脉宽。H桥接收到PWM驱动信号后,输出功率控制信号实现对电机的正反转控制,最终实现机器人的动态平衡控制的目的。
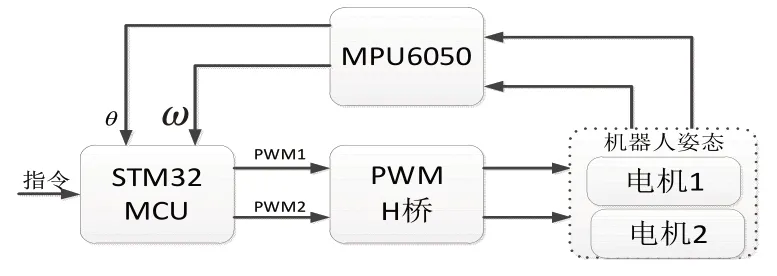
图1 两轮自平衡机器人硬件框图
1.2 数学模型
对机器人进行准确的数学建模,是设计满足性能要求的控制器的前提条件。两轮自平衡机器人的结构示意图如图2所示。
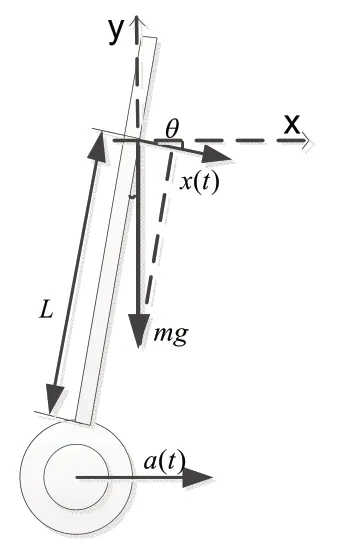
图2 两轮自平衡机器人结构示意图
当车轮加速度向右时,车轮会对车身提供一个反作用力。当车身偏离平衡点时,其受力包括重力加速度分量、车轮加速度分量及角加速度分量:

因此,车身在综合受力的作用下,其产生的力矩M等于刚体转动惯量J与角加速度x(t)的乘积,即有:

对于细杆,当回转轴过杆的端点并垂直于杆时,满足如下公式:

联合公式(1)、(2)、(3),即可得到两轮自平衡机器人的动力学数学模型:

当θ在较小范围内波动时,公式(4)可以进一步近似为:

式中,L为两轮自平衡机器人平衡水平面到地面的重心高度,mg为支撑面所受重力,a(t)为车轮加速度,x(t)为车身在外力作用下,绕坐标原点旋转的角速度,θ为车身结构与垂直方向偏移角度,M为力矩,J为转动惯量,ω为机器人平衡面绕原点坐标旋转的角速度。
1.3 控制器设计
两轮自平衡机器人需要完成转向、前进、后退等动作,首先必须保证机器人的平衡功能。然后将转向、前进及后退动作视为平衡控制器的扰动输入量。即将自平衡控制作为主控制器,转向、前进、后退在机器人取得自平衡的状态下,其加速度a(t)=0,对公式(5)进行拉斯变换,可得出机器人所受外力与其角度变化之间的函数关系:


图3 引入PID反馈后的控制框图
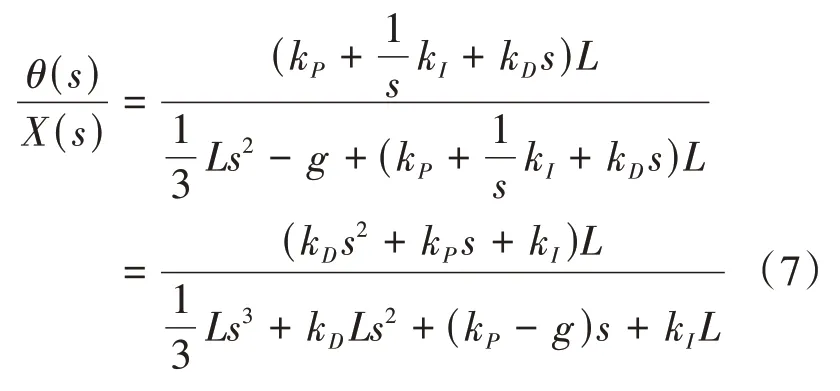
求得控制系统传递函数为:
公式(7)的特征方程如下:

根据劳斯稳定判据,求得劳斯计算表如下:
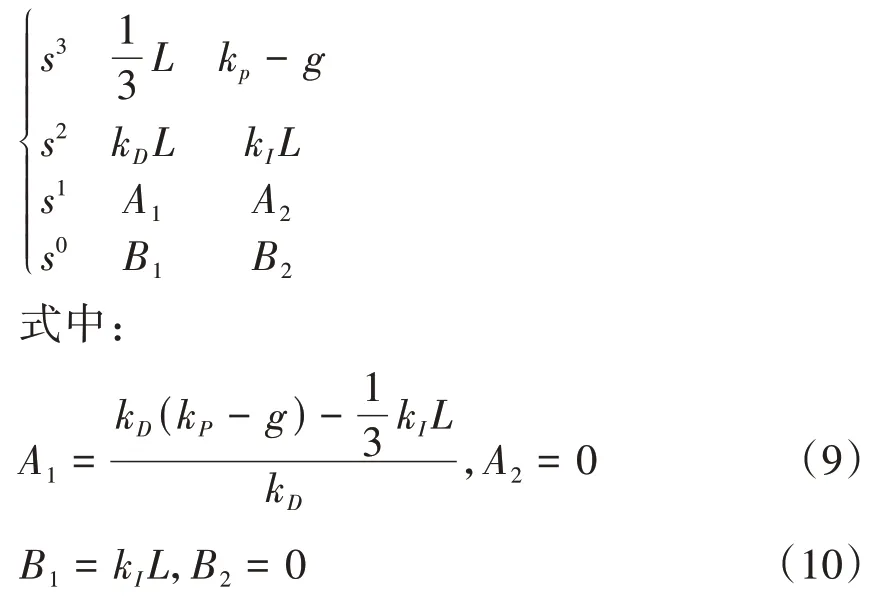
若要确保极点在S平面左半轴部分,需要满足kP>g,kI>0,kD>0;式中,kp,kI,kD分别为PID控制器的比例、积分、微分系数。
2 仿真分析
取两轮自平衡机器人的重心高度L=0.1 m,设置初始角度为1°,在Matlab软件下分别仿真P控制器、PD控制器、PI控制器及PID控制器四种情况。仿真结果如图4所示。由图(a)和图(c)可知,P控制器或PI控制器均会导致系统发散。而由图(b)可以看出,当使用PD控制器时,控制系统收敛,但会存在一个固定的倾角偏差。当使用图(d)中的PID控制器时,系统收敛且超调量及响应时间均有较好的表现。


图4 四种控制器的仿真结果
单独考虑调整PID控制器参数kP,kI,kD时,仿真结果如图5所示。由图(a)可知,kP增大时,控制器响应速度得到提升,但是机器人自身振荡会加剧;而根据图(c)可以得出,当kD从6000增大到30000时,控制器振荡得到抑制。因此,根据上述仿真结果对机器人进行参数调整,可以得到满足性能要求的控制效果。

图5 单独调整PID控制器参数的仿真结果
3 实验验证
将PID控制算法加载到基于STM32单片机的两轮自平衡机器人上进行实验验证,当MCU上电后,机器人即可实现自身的动态平衡,如图6所示。
图6 两轮自平衡机器人动态平衡效果图
计算机通过串口获取机器人的实时倾角数据,并在Matlab上调用plot函数,画出倾角曲线,如图7所示。
由图7可知,机器人在实现自身动态平衡时,其左右摇摆的倾角被控制在[-2°,1°]范围内波动,实现了较好的自平衡控制效果,验证了所设计的控制器的正确性。
4 结论
本文立足于新工科时代背景下高职高专的自动控制原理课程教学,结合该门课程的内容特点,以反馈控制作为切入点,基于两轮自平衡机器人实验平台,系统性地串联了硬件框图、数学建模、控制器仿真分析及实验验证等多个环节,完成了一个完整的反馈控制教学内容编排。学生通过简化的理论推导和积木式编程方法,完成两轮自平衡机器人的数学建模、控制器仿真分析、设计及设备调试等学习内容,有助于提升大专类学生学习自动化课程的兴趣和自信,提升学生理论联系实际并解决实际应用问题的能力。
