RTK和PPK融合差分技术的无人机摄影测量免像控测图精度实证
2022-10-11任智龙李风贤柴生亮李伟伟
任智龙 李风贤 柴生亮 李伟伟
(兰州资源环境职业技术大学, 甘肃 兰州 730000)
0 引言
随着无人机技术的快速发展,无人机性能的不断提升,无人机在测绘行业的应用得到了大力推广[1-2]。无人机摄影测量技术被广泛使用在大比例尺地形图测绘工作中,一直以来无人机摄影测量以其快速高效的测图方式得到了广大业内人士的认可。使用无人机摄影测量技术进行地形图测绘工作首先是利用无人机搭载的专业相机完成测区竖直影像或倾斜影像数据的采集,然后采用专业成图软件完成数字正射影像、数字高程模型和数字线划图的生产。传统摄影测量为了在数字影像相对定向的情况下得到像点在空间的绝对位置,需要进行像控点测量,像控点坐标是摄影测量控制加密测图的基础[3]。然而随着免像控技术的发展,全球卫星导航系统(global navigation satellite system,GNSS)辅助空中三角测量对航摄影像位置进行纠正,可提高航空影像的像点精度,使得摄影测量工作在没有像控点的情况下其测量精度也能满足生产要求,摄影测量免像控技术极大地提高了航空影像测图的工作效率。然而在实际生产中免像控技术并未大量使用,为了确保测图精度,在无人机摄影测量工作中都会进行像控点的测量。本文针对无人机摄影测量免像控技术中的动态后处理(post processed kinematic,PPK)技术和实时动态差分(real time kinematic,RTK)融合差分技术(简称“PPK、RTK融合差分技术”),设置对比实验,采用多种方式完成基于PPK、RTK融合差分技术的无人机摄影测量免像控测图任务,以验证测量成果精度稳定、可靠,能达到1∶500比例尺地形图成图精度要求。同时对不同影像获取方式及影像处理方法的免像控摄影测量测图精度进行了比较,为从事相关生产和研究工作的人员提供参考依据。
1 PPK、RTK融合差分技术
RTK、PPK融合差分技术:通过对RTK技术和PPK技术进行比较,两者各有优缺点,PPK技术采用的是观测数据后期处理的模式,基准站和流动站之间无须建立实时的数据传输路径,所以观测时基准站和流动站之间不受信号传输距离的限制,它的优点是定位半径大、定位精度高、操作简单、技术相对成熟。但同时PPK技术由于是后期解算,使用者无法得到实时的坐标数据,无法实时看到观测的精度,观测时需要保持良好的观测条件。PPK技术与RTK技术相结合,PPK技术保证了无论何种地形都可以获得高精度的基础定位数据,是对RTK观测作业进行及时的补充,两者结合后测量数据的获取更加稳定,数据精度更加可靠,融合差分解算后得到的定位定姿系统(position and orientation system,POS)的位置精度更高[4-7]。
2 技术路线
本文以RTK、PPK融合差分技术为基础,设置两组对比实验,验证了多种方式下的无人机免相控摄影测量测图精度及三维模型精度。第一组实验是基于无人机不同影像获取方式的垂直摄影测量对比实验,实验中分别采用了无人机定高飞行影像获取方式和无人机仿地飞行影像获取方式。第二组实验是基于不同摄影测量方法的对比实验,实验中分别采用了垂直摄影测量与倾斜摄影测量两种摄影测量方法。实验技术路线如图1所示。

图1 无人机免相控摄影测量技术路线图
3 基于无人机不同影像获取方式的垂直摄影测量对比实验
此实验为验证基于RTK、PPK融合差分技术的无人机免像控垂直摄影测量精度能够满足1∶500比例尺测图精度要求。同时比较了采用无人机定高飞行和仿地飞行两种不同影像采集方式下的摄影测量测图精度大小。实验以无人机影像获取方式为单一变量,分别用无人机定高飞行和无人机仿地飞行两种影像获取方式进行影响采集,为保证变量的单一性,本次实验选用了同一测区,在同一时间采用相同的数据采集设备及数据处理软件进行了数据采集和数据处理工作。实验技术流程如图2所示。

图2 实验技术流程示意图
实验测区为西北地区某校园内,测区依山而建,地形陡峭,建筑物比较集中。测区高程为1 600~2 200 m,面积约为400 km2,测区最大坡度为80°。实验选用的无人机是飞马智能航测系统D300,相机选用的是D-OP410五镜头倾斜模块,数据处理软件采用飞马“无人机管家”[8-9]。
3.1 数据获取
首先根据测区实际情况和设备性能要求对无人机飞行路线进行规划设计。实验共设计了无人机定高飞行和无人仿地飞行两种飞行路线。无人机定高飞行摄影测量,无人机飞行高度为300 m,最高点的影像分辨率为2 cm,最低点的影像分辨率为4 cm,影像航向重叠度为80%,旁向重叠度为70%。航线航向外扩50 m,旁向外扩1条航线。无人机仿地飞行摄影测量航线,无人机飞行高度300 m,影像分辨率为2 cm,影像航向重叠度为80%,旁向重叠度为70%。航线航向外扩50 m,旁向外扩1条航线。
然后进行数据采集,在山顶开阔位置架设基站,通过输入连续运行参考站(continuously operating reference stations,CORS)账户,实现CORS网络接入并实现RTK模式,同时记录静态GNSS观测数据。实验采用2000国家大地坐标系,基站点采用CORS坐标。完成飞行任务并获取影像和影像POS数据,此次定高飞行采集影像315张,仿地飞行采集影像436张。同时进行检查点坐标测量,检查点测量时需要保证检查点坐标与基站点坐标在同一个坐标系,以免检查点测量坐标的系统误差影响实验结果。本次实验共设置90个检查点,检查点分布在测区不同的区域范围,尽可能使测区不同的地形特征处都有所涵盖,两种摄影测量成果共用相同的检查点进行精度检核。
3.2 数据处理
准备好基站GNSS数据、飞机GNSS数据、影像数据、相机报告等测量数据之后,进行数据处理工作。主要工作包括利用RTK数据和PPK数据进行融合差分解算,得到高精度的差分POS,再利用高精度差分POS进行空中三角测量计算,完成自由网空三并检查空三成果。
3.3 精度验证
完成空三处理之后,将检查点导入空三成果进行刺点工作,然后重新进行空三计算,分别计算出两组摄影测量成果的平面误差和高程误差。
统计定高飞行和仿地飞行测量成果平面误差。两组测量成果中检查点的横坐标误差ΔX和纵坐标误差ΔY都小于10 cm,分别以ΔX为横轴以ΔY为纵轴建立空间直角坐标系,定高飞行检查点的平面误差分布如图3所示,仿地飞行各检查点的平面误差分布如图4所示。计算得出定高飞行测量成果中检查点平面中误差。

图3 定高飞行测量检查点平面误差分布
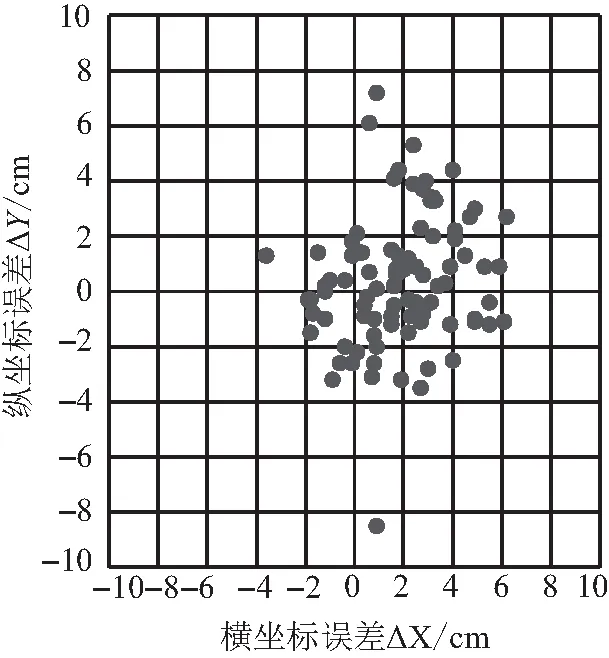
图4 仿地飞行测量检查点平面误差分布
对图3和图4的比较可以看出,定高飞行检查点的平面误差分布的离散性高于仿地飞行检查点平面误差的分布,结合两组数据中误差计算结果可以得出仿地飞行平面误差的精度高于定高飞行平面误差的精度。
定高飞行测量和仿地飞行测量中检查点的高程误差分布如图5所示。计算得出定高飞行测量成果中检查点的高程中误差为0.076 m,仿地飞行测量成果中检查点的高程中误差中误差为0.044 m。结合图5中检查点的误差分布线性可以得出仿地飞行测量高程精度高于定高飞行测量高程精度。
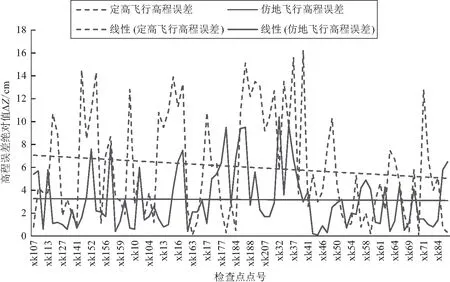
图5 定高飞行测量和仿地飞行测量检查点高程误差分布
两组飞行测量成果中检查点的中误差计算结果如表1所示。根据《数字摄影测量空中三角测量规范》中对1∶500比例尺成图的空三精度点位中误差的要求,平面中误差为0.175 m,高程中误差为0.150 m[10]。对比得出,基于两种不同影像获取方式的竖直摄影测量成果精度都能满足1∶500成图精度要求。
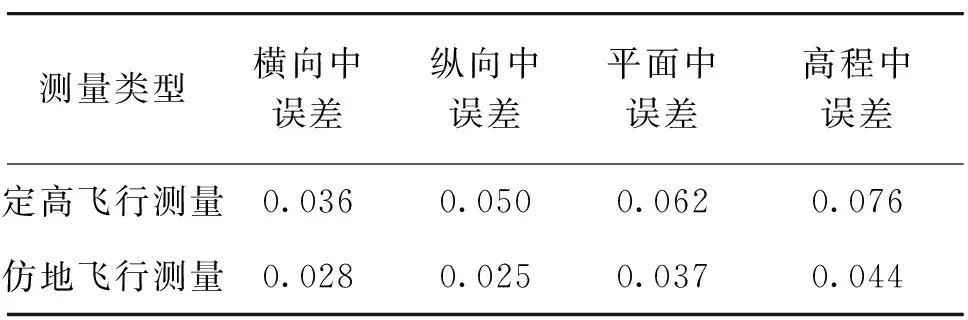
表1 定高飞行测量与仿地飞行测量检查点中误差对比表 单位:m
4 无人机垂直摄影测量与倾斜摄影测量测量精度对比实验
此实验为验证基于RTK、PPK融合差分技术的无人机免像控倾斜摄影测量精度高于垂直摄影测量精度,且都能够满足1∶500比例尺测图精度要求。实验同时比较了倾斜摄影测量和垂直摄影测量三维模型建设成果。两个实验选取了同一个测区,采用了相同设备同一时间进行,本组实验的测区和设备与第一组实验的相同。为了保证变量的单一性,完成倾斜摄影测量数据获取工作后,垂直摄影测量的影像数据选用倾斜摄影影像数据中的正射影像。
4.1 数据采集
此次实验测区影像数据获取采用无人机定高飞行影像获取方式,飞机飞行高度300 m,最高点的影像分辨率为2 cm,最低点的影像分辨率为4 cm,影像航向重叠度为80%,旁向重叠度为70%。航线航向外扩50 m,旁向外扩1条航线,两组无人机POS如图所示。无人机搭载5镜头倾斜相机,共采集到5组影像,共计约1 500张像片。
4.2 数据处理
实验将采集处理好的基站GNSS数据、飞机GNSS数据、影像数据、相机报告等数据,然后进行将RTK数据和PPK数据进行融合差分解算,得到高精度的差分POS。再利用高精度差分POS进行空中三角测量计算,完成自由网空三并检查空三成果[11]。本次实验共设置30个检查点,完成检查点坐标测量工作。
4.3 精度验证
完成空三处理之后,将检查点导入空三成果进行刺点工作,然后重新进行空三计算,分别计算出两组摄影测量成果的平面误差和高程误差[12]。
统计垂直摄影测量和倾斜摄影测量成果平面误差。两组方式中检查点的横坐标误差ΔX和纵坐标误差ΔY都小于8 cm,分别以ΔX为横轴以ΔY为纵轴建立空间直角坐标系,垂直摄影测量检查点的平面误差分布如图6所示。倾斜摄影测量各检查点的平面误差分布如图7所示,计算倾斜摄影测量结果中检查点的平面误差。对图6和图7的比较可以看出,垂直摄影测量检查点的平面误差分布的离散性高于垂直摄影测量检查点平面误差的分布,结合两组数据中误差计算结果可以得出倾斜摄影测量平面误差的精度高于垂直摄影测量平面误差的精度。

图6 垂直摄影检查点平面误差分布

图7 倾斜摄影检查点平面误差分布
统计垂直摄影测量和倾斜摄影测量成果高程误差。垂直摄影测量中有5个检查点的高程误差大于10 cm,倾斜摄影测量中有1个检查点的高程误差大于10 cm,高程误差值都小于16 cm,以检查点点名为横轴,以高程中误差值为纵轴建立空间直角坐标系,垂直摄影测量和倾斜摄影测量检查点的高程误差分布如图8所示,结合图8中检查点的误差分布线性可以得出倾斜摄影测量高程精度高于垂直摄影测量高程精度。

图8 垂直摄影测量和倾斜摄影测量检查点高程误差分布
两组测量成果中检查点的中误差计算结果如表2所示,根据《数字摄影测量空中三角测量规范》中对1∶500比例尺成图的空三精度点位中误差的要求,平面中误差为0.175 m,高程中误差为0.150 m,测量结果与规范要求对比得出,垂直摄影测量成果精度和倾斜摄影测量成果精度都能满足1∶500成图精度要求[13]。

表2 垂直摄影测量与倾斜摄影测量检查点中误差对比表 单位:m
4.4 三维建模对比
分别利用垂直影像和倾斜影像进行测区三维模型建设,两种方式都能完成三维模型建设,模型未有明显漏洞,模型整体的完整性比较好[14]。选取两组模型的局部进行比较。垂直摄影模型局部扭曲较为严重见图9(a),倾斜摄影模型的线条清晰建模效果远远好于垂直摄影模型,见图9(b)。垂直摄影模型在屋檐遮挡部位的失真严重,如图9(c)和图9(d)所示。

(a)局部扭曲严重 (b)线条清晰建模
5 结束语
本篇论文通过两组对比实验验证了基于RTK、PPK融合差分技术的无人机免像控摄影测量精度,同时详细地比较分析了摄影测量工作在数据获取、数据处理、成果验证等不同阶段的操作流程。实验结论如下:
(1)基于RTK、PPK融合差分技术的无人机免像控摄影测量精度可以满足1∶500比例尺测图精度要求。本文通过多种方式进行了测验,每组测验成果都满足1∶500比例尺测图的精度要求。
(2)在基于RTK、PPK融合差分技术的无人机免像控垂直摄影测量中,采用仿地飞行影像获取方式的测量精度高于采用定高飞行影像获取方式的测量精度。
(3)在基于RTK、PPK融合差分技术的无人机免像控摄影测量中,倾斜摄影测量的成果精度高于垂直摄影测量的成果精度。测量成果都能满足1∶500比例尺测图的精度要求。
(4)在基于RTK、PPK融合差分技术的无人机免像控摄影测量中,利用倾斜摄影测量建设的三维模型精度高于利用垂直影像测量建设的三维模型精度。利用倾斜摄影测量建设的三维模型在建模的完整性、建模细节的精细度、建模纹理的清楚度、线条的真实性等方面都高于利用垂直摄影测量建设的三维模型。
