基于格网点的三维激光扫描技术在边坡监测中的应用
2022-10-11李树文隋俭武
刘 斌 李树文 隋俭武 朱 君
(济南市勘察测绘研究院, 山东 济南 250101)
0 引言
工程建设过程会对边坡稳定性产生重要影响,边坡滑动对人员财产都会造成损害,边坡的监测能够及时获取边坡的稳定情况,对工程建设意义重大。受边坡坡度影响,监测点位布设困难、监测区域难以反映整个监测范围且点位破坏后新点位布设困难,传统监测手段在边坡监测过程中难度较大[1-2]。
随着科技发展,三维激光扫描技术应用越来越广泛[3-4],利用三维激光扫描无须接触、扫描范围大、速度快等优势[5-7],能够得到海量点云数据,且无须进行监测点位布设,通过点云数据拟合得到边坡变化情况,为复杂测量问题提供了全新解决方案[8-14]。
本文利用三维激光扫描仪对在建工程边坡稳定性情况进行监测,通过对点云数据获取及处理,建立格网点位置,利用平均值法与反距离加权插值法进行监测格网点数据拟合,通过分析两期拟合数据,验证了基于格网点的三维激光扫描技术在边坡监测中应用的可行性。
1 实例数据
在建道路施工工地边坡长约100 m,宽约6 m的边坡监测范围,现场边坡坡度较大,人工布设点位困难很大,鉴于此,选取天宝TX8三维激光扫描仪进行边坡扫描。天宝TX8三维激光扫描仪以360°×317°的视场和每秒1 000 000点的数据获取速度,可以快速高效地完成测量任务,在其Extend模式下,测程可扩展至340 m。
在施工区外稳定区域,布设稳定基准点,在基准点架设扫描仪进行三维激光扫描,后视定向点架设标靶球进行坐标校正,利用Level1模型进行全景扫描,在边坡监测区域利用Level3模式进行局部精细化扫描,获取完整监测区域的点云信息。边坡扫描示意图如图1所示。
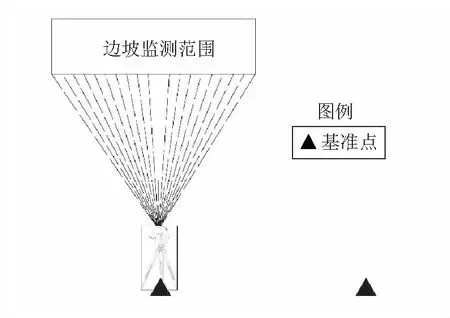
图1 边坡扫描示意图
2 数据处理
2.1 点云数据处理
外业采集点云数据与基准点坐标系统不一致,需要将点云数据转换到监测坐标系中。利用Trimble RealWorks软件进行点云数据处理,利用地理坐标系统转换功能,将点云数据转换到已知坐标系中。根据监测区域范围,本次扫描点云数据仅用一站即可扫描完成,免除点云配准带来的误差影响,点云转换完成后进行点云裁剪工作,去除杂乱点云数据,生成所需监测范围内的点云数据。
2.2 格网点提取
根据点云数据进行格网点提取,建立监测格网点位。格网点提取时,按照坐标轴方向进行划分,本次监测区域因X轴(南北向)间隔较小,按照Y方向间隔5 m、H方向间隔1 m的原则进行划分取样,生成监测格网点位置。
2.3 格网点数据拟合
对于格网点处监测数据的拟合,首先确定搜索范围,通过点云数据与格网点位置关系,确定搜索范围内的点云数据,利用格网点搜索范围内的点云数据进行监测数据拟合,一般采用平均值法、反距离加权插值法等方法进行拟合。
平均值法较简单,将搜索范围内的点云数据求和取平均,得到格网点各方向的平均值,作为最终格网点监测数据。
反距离加权插值法是根据搜索范围内点云数据与格网点距离的加权插值法,各点的权重与距离格网点的距离成反比,距离格网点较近的点云数据被给定一个较高的权重份额,距离越远,权重越小[15-16]。反距离加权插值法计算公式如下。
(1)
(2)
(3)
(4)
(5)
式中,(x0,y0,h0)为格网点三维坐标;(Vx0,Vy0,Vh0)为格网点在三个方向的拟合值;(xi,yi,hi)为点云中点的三维坐标;n为点云中点的个数;di为点云中点到格网点的距离;p为距离幂参数,是一个正实数,默认值为2;λi为点对应的权值。
数据处理的流程如图2所示。
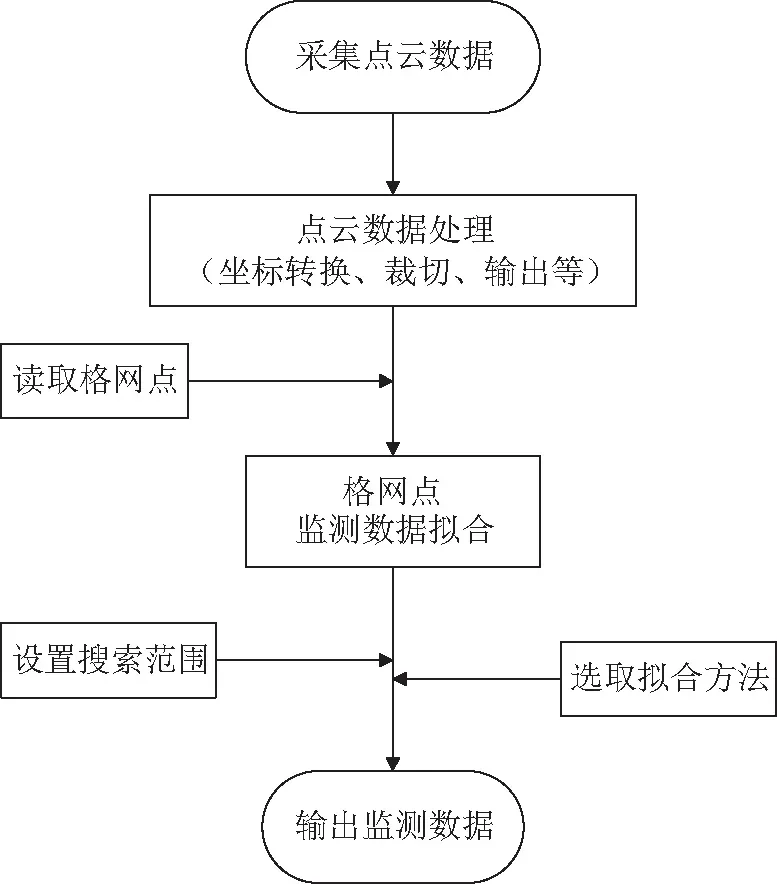
图2 数据处理流程图
3 结果分析
3.1 搜索半径对监测结果的影响
本次共扫描2次边坡点云数据,两次时间间隔较短(认为监测数据无变化),本工程共建立97个格网点,设置不同的搜索半径,利用反距离加权插值法进行格网点监测数据拟合,比较两次监测数据的差值(取三个方向差值绝对值最大值),如图3所示。
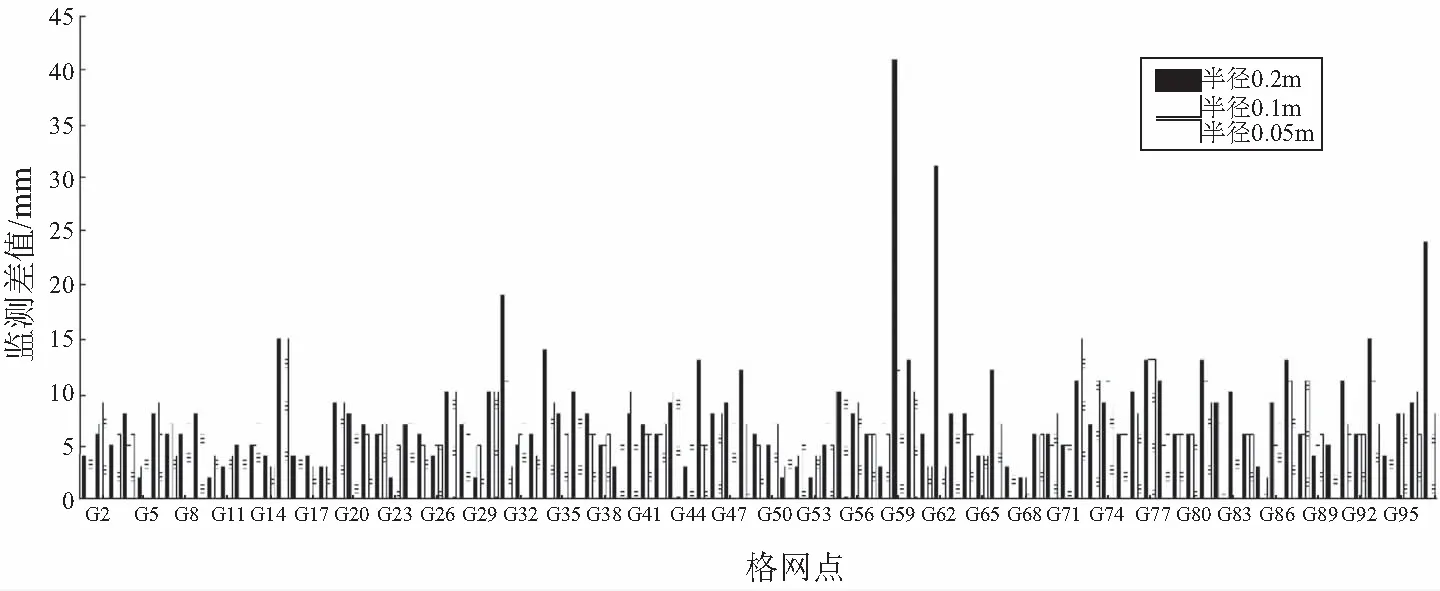
图3 不同半径监测差值比较表
由图3可知,搜索半径为0.2 m时的两次监测数据差值较大,最大值为41 mm,平均值为8 mm,最小值为2 mm,半径为0.1 m与0.05 m对应的监测差值较小,趋势一致。其中,半径为0.1 m的监测差值最大值为15 mm,平均值为6 mm,最小值为1 mm,半径为0.05 m的监测差值最大值为15 mm,平均值为6 mm,最小值为2 mm,且两者对应的监测差值均在20 mm以内,满足《建筑变形测量规范》JGJ 8—2007中四等监测要求[17]。
3.2 不同拟合方法对结果的影响
因半径0.1 m与0.05 m对两次监测数据差值变化较小,本次以半径0.1 m为例,分析平均值法与反距离加权插值法对两次监测数据的影响,因边坡呈东西向(Y方向)分布,本次主要分析其在南北向(X方向)与高程(H方向)的变化。如图4、图5所示。
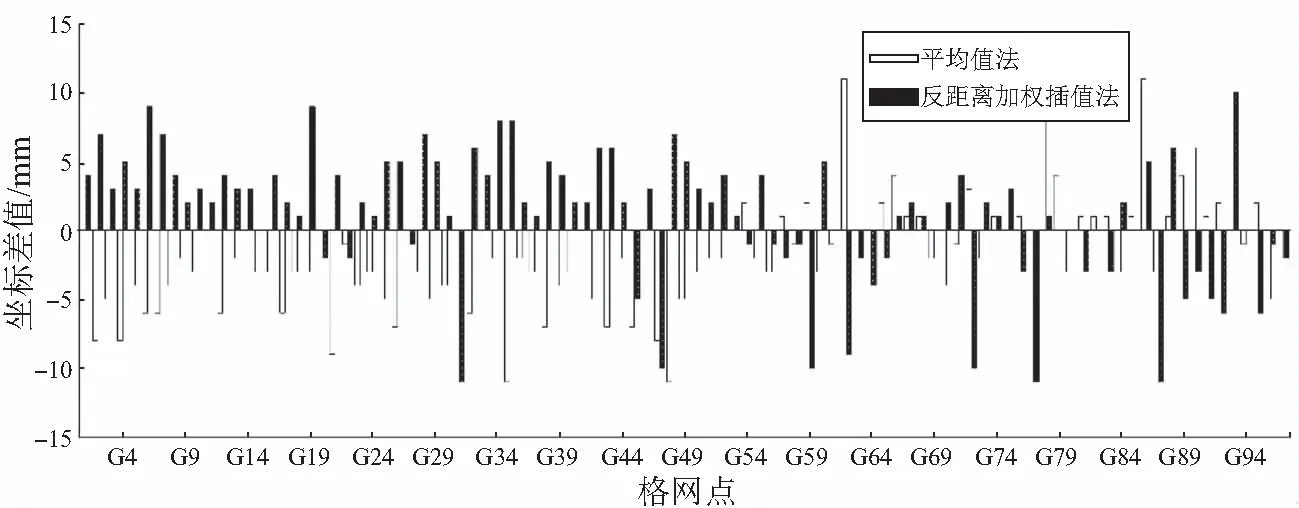
图4 X方向监测数据差值统计

图5 H方向监测数据差值统计
由图4、图5可知,因拟合方法不同导致两次监测数据差值变化方向略有差异,但两种方法的X方向监测差值最大为11 mm,平均值法在H方向差值最大值为14 mm,反距离加权插值法在H方向差值最大值为15 mm。对两种拟合方法的监测差值绝对值所占比例统计分析如图6所示。
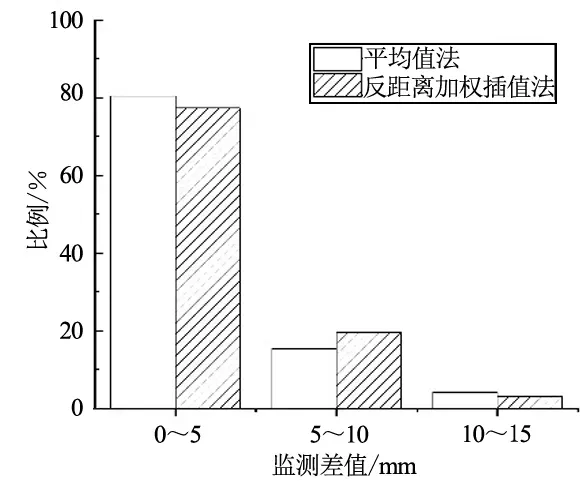
(a)X方向监测差值区间统计分析
由图6可知,两种方法在0~5 mm、5~10 mm、10~15 mm三个区间的所占比例趋势接近,其中差值在0~5 mm内的占比最大,差值在10~15 mm占比最小,两种拟合方法的监测差值绝对值在10 mm之内的比例多达95%,从以上数据分析可知,两种方法拟合监测数据差值结果接近,监测结果均能满足规范及设计要求。
4 结束语
基于传统监测方法在边坡监测中存在的困难,本文以三维激光扫描在边坡监测中的应用为例,通过提取监测格网点,利用平均值法与反距离加权插值法对监测数据进行拟合,通过实例数据分析,探究了不同搜索半径对拟合数据的影响,分析比较了两种拟合方法对监测数据差值的影响,验证了三维激光扫描技术在边坡监测中应用的可行性,为同类监测项目实施提供了借鉴。
