滑翔制导炮弹气动-弹道综合优化方法
2022-10-11常思江张哲玮赵林林
赵 璇,常思江*, 张哲玮,赵林林
(1. 南京理工大学 能源与动力工程学院,南京 210094;2. 中国兵器工业试验测试研究院,陕西 华阴 714204; 3.辽沈工业集团有限公司,沈阳 110045)
0 引 言
滑翔制导炮弹是在常规炮弹的基础上增加制导控制系统而形成的远程精确打击武器,凭借效费比高、 反应快且使用灵活等优点逐渐受到各国重视。制导炮弹由火炮以一定初速发射后,尾翼张开保持稳定飞行,随后启动火箭发动机开始助推,发动机熄火后炮弹则像普通尾翼弹一样继续在升弧段上爬升。当炮弹到达弹道顶点附近时,鸭舵张开,同时制导控制系统开始工作,在降弧段通过偏转鸭舵使全弹产生一个正攻角,由此增大升力向前滑翔,实现增程。由于制导炮弹成本低、 体积小,带来了一系列外形设计和弹道设计的问题。若不能合理地开展参数设计,将直接影响制导炮弹的滑翔和机动能力,甚至难以完成期望的作战任务。
气动外形设计与弹道优化是影响制导炮弹总体性能的关键技术,国内外已开展了相关研究。Vasile等通过DATCOM软件在给定工况下形成气动数据库,并利用粒子群算法优化了增程炮弹的舵面尺寸; Yang等利用自适应遗传算法以射程最大为目标函数,对鸭式布局制导火箭弹的鸭舵和尾翼进行了外形优化; Fowler等在2015年提出了一种基于试验设计和Kriging模型的制导炮弹外形设计优化方法,并通过遗传算法进行多目标寻优得到一组Pareto最优设计集,尽管该文献考虑了6自由度弹道方程的耦合,但并未涉及方案弹道的优化设计; Vasile等又在2020年提出了一种基于空气动力学、 飞行动力学和制导控制等多学科的设计方法,用于评估远程制导炮弹的性能,但是其弹道设计是在外形确定后再进行的,气动和弹道没有紧密耦合。国内方面,雷娟棉等设计了增程制导炮弹的气动外形,并通过风洞实验验证了该外形的气动性能,但未采用优化方法; 史金光等建立了鸭式制导炮弹的气动外形优化数学模型,并通过一定的优化设计方法得到较佳的外形参数; 孙世岩等结合参数化建模方法、 非线性面元法及遗传算法,对制导炮弹的气动外形进行了优化设计; 赵璇等提出了一种基于多可信度代理模型技术的气动外形快速优化方法,对制导炮弹的鸭舵外形进行了优化,有效提升了炮弹升阻比。但上述研究均没有涉及弹道学科。单继祥等将气动和弹道耦合建立了代理模型,并利用遗传算法以最大落地速度为目标对激波针外形进行了优化,但不涉及弹道的动态优化。仅就弹道优化方面而言,史金光、 易文俊等分别利用序列二次规划法和最大升阻比法对滑翔增程弹的最远滑翔弹道进行了优化,并对比分析了两种方法的各自优缺点,但并未研究对固定目标方案的弹道设计方法; 陈琦等以飞行时间为性能指标对固定目标的滑翔弹道进行了优化设计,考虑了动力学滞后并引入了虚拟控制量作为优化变量,利用Gauss伪谱法求解了弹道优化模型。
所谓的气动-弹道综合优化,是通过某种优化方法将气动、 弹道等多个学科分析模型进行综合考量,将静态参数优化与动态过程优化相结合,以获得具有更优整体性能的一种技术或方法。由上述文献可知,无论是制导炮弹的外形优化(静态参数优化),还是弹道优化(动态过程优化),大多是分别独立研究,而关于制导炮弹气动-弹道综合优化虽近期有所关注,但研究相对较少。张海瑞等为了研究某升力体构型飞行器在大空域、 宽速域范围内的气动适应性问题,提出一种基于气动-弹道一体化模型的优化设计方法,并在多约束条件下实现了飞行器气动外形全局优化。由文献[14]可知,气动-弹道综合优化技术能够考虑到大空域、 宽速域飞行剖面特征对气动外形适应性的影响,有助于全面提升飞行器气动外形的设计精度和水平,因而具有很好的应用前景。
对于制导炮弹,受限于发射平台(如火炮等),其舵面小、 控制能力有限,但是其炮口初速可达马赫数2.5以上,滑翔速度一般为亚、 跨声速,飞行高度可达20 km左右。发射环境恶劣、 飞行空域大使得炮弹动力学特性变化较大,且存在诸多不确定扰动,这就对制导炮弹的气动外形和控制参数设计提出了较高的要求。根据上述文献,制导炮弹的气动外形优化一般是对其几何外形参数的静态优化,而弹道优化则是对滑翔过程中舵偏角、 攻角等控制变量的变化规律进行动态优化。通常,控制参数设计是建立在炮弹气动参数的基础之上,二者具有较强的耦合关系,若引入气动-弹道综合优化技术,则更有利于滑翔制导炮弹的方案弹道设计及总体性能参数优化。因此,本文以某大口径滑翔制导炮弹为对象,综合利用气动力工程算法、 自适应hp-Radau伪谱法,建立以射程和飞行时间等性能指标为目标函数、 舵翼外形参数和攻角为设计变量的气动-弹道综合优化模型,将炮弹外形参数优化与弹道动态优化过程深度融合,并通过采用基于Kriging模型和组合加点法则的代理优化算法,高效获取该气动-弹道综合优化问题的解。
1 气动-弹道综合优化模型
滑翔制导炮弹的外形参数决定了炮弹的气动特性,并最终影响弹道特性。为了体现这些外形参数对弹道的影响,需要研究气动与弹道学科之间的耦合关系,建立各学科的分析计算模型。参照文献[15]给出滑翔制导炮弹的气动、 弹道学科与炮弹外形耦合关系的设计结构矩阵(Design Structure Matrix, DSM),如图1所示,对角线元素表示各个学科,右上方表示数据的前馈传递,左下方表示数据的反馈传递。

图1 滑翔制导炮弹设计结构矩阵
本文的计算模型包括气动分析模型和弹道分析模型。气动分析模型是根据炮弹的外形参数、 实时飞行状态(如马赫数、 高度、 攻角)等计算气动系数(如零升阻力系数、 升力系数导数等),为弹道分析提供数据支撑。弹道分析模型则需要外形、 气动等学科计算结果与弹道方程相结合并优化设计出最优控制规律,完成炮弹全过程飞行仿真。
1.1 气动分析模型
目前获得气动参数的方法包括工程算法、 数值模拟、 风洞试验和靶道自由飞行试验等。在无法开展风洞试验或自由飞行试验的初步设计阶段,气动工程算法和计算流体力学数值模拟是重要的气动参数预测手段。一般而言,数值模拟的计算精度高于工程算法,但数值计算耗时很长,难以实现快速优化,而工程算法一般仅给出整体和部件的气动力和力矩,计算速度快且易与其他计算程序连接进行一体化计算。为兼顾精度和快速性,本文采用文献[17]中的气动力工程算法来分析滑翔制导炮弹的气动特性。表1给出了该算法对不同部件所选用的计算方法,从而计算出所需的气动参数。
表1 气动力工程计算方法
1.2 弹道分析模型
对于滑翔制导炮弹,为了实现远程精确打击,往往需要在发射前预先设计好一条方案弹道,飞行时控制机构按照既定的方案弹道操纵舵面调整飞行姿态。由于制导炮弹在滑翔段为无动力飞行,机动能力有限,那么方案弹道设计的好坏将直接影响制导炮弹的增程效果及作战性能,因此,滑翔制导炮弹的方案弹道设计也是总体设计中的一个重要环节。滑翔段的弹道设计实际上可以看作是一个单阶段的轨迹优化问题。本文以最大射程、 飞行时间短/能量消耗少为优化目标,在状态约束及过程约束的条件下利用自适应hp-Radau伪谱法实现轨迹优化。
1.2.1 炮弹运动方程
在初步设计阶段,为便于研究弹道特性,采用质点运动方程作为弹道计算模型,并作如下假设: (1)制导炮弹在飞行过程中是瞬时平衡的; (2)气象条件是标准无风雨的,且略去外界干扰的影响; (3)制导炮弹在飞行过程中无侧向运动。滑翔制导炮弹在铅垂平面内的质心运动方程组如下:
(1)
式中:为时间;为射程;为高度;为速度;为弹道倾角;为炮弹质量;()为攻角控制指令;和分别为阻力和升力,有

(2)

1.2.2 自适应hp-Radau伪谱法
Radau伪谱法的原理是将每个网格子区间[-1,]上的状态变量和控制变量在一系列LGR(Le-gendre-Gauss-Radau)点上离散化,并以离散点为节点构造Lagrange插值多项式来逼近状态变量和控制变量,把连续时间最优控制问题转化为具有一系列代数约束的非线性规划问题,再通过某种非线性规划求解器得到数值最优解。
本文采用文献[20]中的自适应hp-Radau伪谱法,将求解最优控制问题的h法(局部配点法)和p法(全局伪谱法)结合起来,综合考虑解的精度和计算效率,以微分代数约束在特定采样点上的残差作为解的近似精度评估准则,对于需要改进求解精度的区间,根据轨迹曲率通过细化网格区间或增加区间内插值多项式的维数两种方式提高求解精度。在整个迭代求解过程中,子区间的个数、 区间宽度和区间内插值多项式的维数都是变化的。
1.3 综合优化模型
在以上两个学科分析模型的基础上,建立气动-弹道综合优化模型。
1.3.1 目标函数
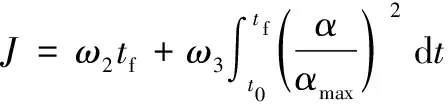
任务需求不同则优化目标不同。一般而言,为了考察滑翔制导炮弹的滑翔能力,需要对其最大射程进行优化研究。另外,当攻击固定目标时,为了提高炮弹的快速反应能力,往往要求飞行时间尽可能的短; 同时,为了减小被拦截的概率,提高末端攻击的机动性,也需要制导炮弹在滑翔过程中尽量节省能量。滑翔过程中消耗的能量,采用控制量平方对时间的积分来表示。考虑到制导炮弹的控制能力有限,同时避免弹体失速,设定为攻角的最大允许值,并在目标函数中进行归一化处理。因此,目标函数为

(3)
式中:,,为权重系数,视不同需求分配不同的权重系数。
1.3.2 设计变量
以某滑翔制导炮弹的鸭舵和尾翼为设计对象,依据舵面参数确定的原则,确定后掠梯形舵面的外形参数,主要包括舵面的半展长/2、 根弦长、 舵面前缘至弹顶的距离和前缘后掠角; 矩形尾翼的外形参数包括尾翼的半展长/2、 根弦长以及尾翼前缘至弹顶的距离。以上7个主要几何参数就是外形优化的静态设计变量,如图2所示。

图2 某滑翔制导炮弹的外形设计变量
与外形参数不同,滑翔过程中的控制参数需要随时间连续变化。本文选取攻角作为控制变量,总的设计变量包含7个静态变量和1个动态变量:
=[2,,,,2,,,]
(4)
1.3.3 约束条件
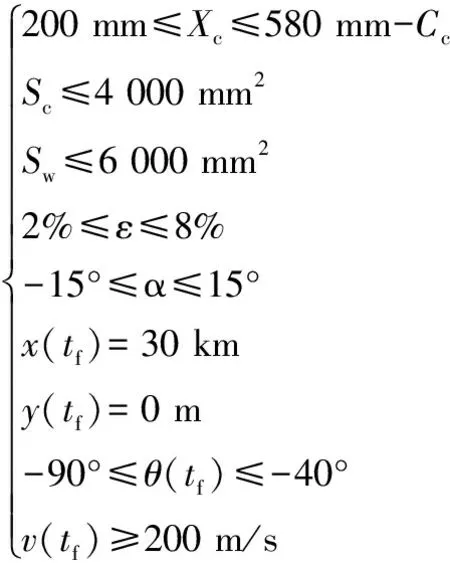
对于滑翔制导炮弹,所参加调优的设计方案除了满足设计变量的范围约束,还应保证几何约束、 稳定性约束、 控制约束以及滑翔终端约束等9个条件:
(5)

综上,滑翔制导炮弹的气动-弹道综合优化数学模型可表示为
(6)
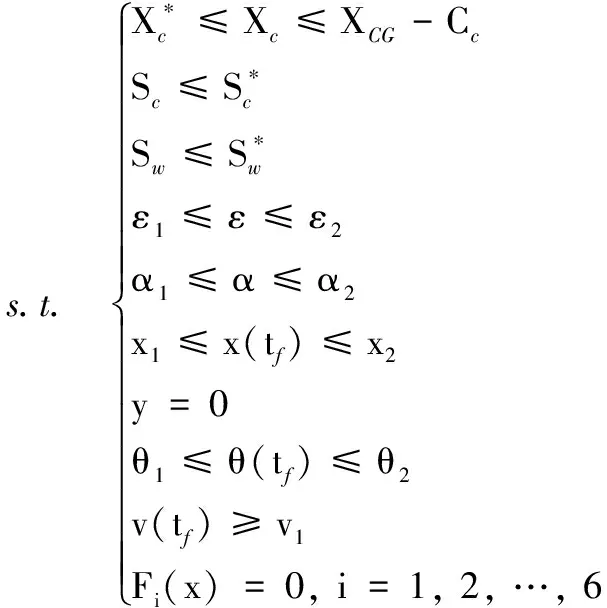
式中:()表示式(1)中制导炮弹质点弹道模型的6个方程。
2 代理优化算法
由于耦合了弹道分析模型,增大了优化迭代的计算量,增加了计算时间。对此,引入代理模型技术来代替优化过程中耗时的精确数值分析过程。所谓代理模型,是指在分析和优化过程中可替代那些复杂且费时的数值分析的近似数学模型。目前比较常用的代理模型有响应面模型、 径向基函数模型、 人工神经网络模型和Kriging模型等。近年来,代理模型不再是简单替代,而是发展为一种基于历史数据来驱动新样本点加入,并逼近局部或全局最优解的优化机制,即代理优化(Surrogate-Based Optimization,SBO)算法。
本文采用基于Kriging模型的代理优化算法作为气动-弹道综合优化模型的优化方法,与文献[14]方法不同的是,在更新代理模型的时候,依据两个不同的加点准则能够一次性增加两个样本点,同时兼顾了全局搜索和局部挖掘,收敛效果更好,其优化流程如图3所示。首先,采用一定的试验设计方法确定一组样本点,并通过气动、 弹道分析模型分别计算其响应值构成初始样本集。然后,建立设计变量和目标函数之间的Kriging模型来计算任意点处的改善期望和预估响应值。其次,利用组合加点准则筛选出改善期望最大及目标函数预估值最小的两个样本点。最后,判断模型预估最小值处的误差是否满足收敛精度,若不满足则对新样本点进行气动-弹道综合计算,从而构成新样本集并更新代理模型; 若满足精度要求,则输出最优方案。
由其原理及优化流程可以看出,初始样本的选择、 代理模型及其训练、 优化加点准则,是代理优化算法的三大要素。下面从这三个方面入手逐一介绍,并对代理模型的精度进行验证。
2.1 试验设计
代理优化算法的第一步就是设计初始样本点并建立初始代理模型。不同的试验设计方法选取的样本点分布不同,往往导致代理模型的近似精度不同,从而影响优化效率。针对全局优化问题,通常采用现代试验设计方法选取一组样本点。一般而言,基于Kriging模型的代理优化算法对初始样本点数目并不敏感,初始样本点数与后期增加的样本点数之比在1∶2以下。本文采用拉丁超立方设计在外形参数的7维设计空间中进行抽样。
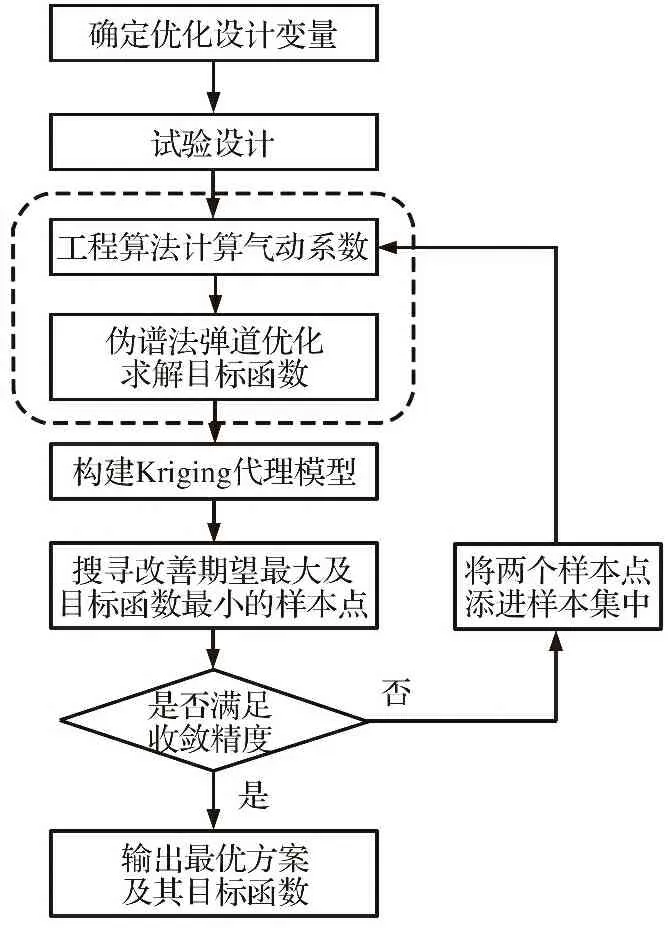
图3 气动-弹道综合优化流程图
2.2 Kriging代理模型
Kriging模型是一种源于地质统计学的高斯随机过程模型,与其他代理模型显著不同的是,其不仅能给出对未知函数的预估值,还能给出预估值的误差估计,因此,在各学科的优化设计中逐渐受到重视。
Kriging模型假设未知函数的响应值与设计变量之间的真实关系为
=()+()
(7)
式中:()为一个已知的关于的回归模型,提供了设计空间中的全局趋势模型,一般为多项式模型;()为一个静态随机过程,其均值为0,方差为。在设计空间的不同位置处,这些随机变量具有某种相关性,该相关性可用协方差表示为
[(),()]=(,)
(8)
式中:(,)表示任意两点的相关函数,当两点距离为0时等于1,当距离无穷大时等于0,即距离越大相关性越小。

(9)


(10)
此外,Kriging模型还能给出预估值的均方差估计:

(1-)/]
(11)
该均方差可以用于指导加入新样本点来提高代理模型精度或逼近优化问题的最优解。
2.3 组合加点准则
通过初始样本点建立代理模型后,即可通过某种法则加入新的样本点循环更新代理模型,直至优化问题收敛。这个过程中采用传统优化算法确定由加点法则产生的新样本点的过程,即为“子优化”。主优化每一次循环加点都需要进行一次完整的子优化迭代收敛过程。在子优化中只需调用代理模型预估而无需精确数值分析,可以快速计算。目前,基于Kriging模型的代理优化算法已经发展了多种加点准则,其中最大改善期望(Expected Improvement,EI)准则因为优异的全局搜索特性而得到广泛应用。

(12)
当标准差()>0时,改善期望计算如下:

(13)
式中:和分别为标准正态累计分布函数和标准正态分布概率密度函数。当标准差()=0时,[()]=0。
通过求解最大化EI值的子优化问题:
max[()]
s.t.≤≤
(14)
从而可得到新的样本点。
理论上,EI方法是一种全局优化算法,但在优化后期收敛较慢。因此,为弥补其缺陷,参考了文献[24]引入最小化代理模型预测(Minimize Surrogate Prediction,MSP)准则,在增加改善期望最大处样本点的基础上,再搜索当前代理模型中预估值最小的样本点一并加入样本集中,即
(15)
采用遗传算法求解式(14)~(15)的子优化问题,再对最优解进行精确数值分析,从而实现在一步迭代中添加两个新样本,直至整个优化过程收敛。研究表明,该组合加点方法对于气动优化设计而言非常实用。
2.4 模型精度验证
为了检验基于EI+MSP组合加点准则的代理优化算法的性能,利用某二维函数对该算法进行测试; 此外,为了验证Kriging模型对气动-弹道综合计算问题的精度,也进行了相应测试以充分检验其拟合能力。
2.4.1 函数测试
以改进的双变量Branin函数为例:

(16)
式中:∈[-5, 10];∈[0, 15]。
图4展示了将其变量缩放至[0,1]区间后的三维全貌。该函数在右下角有两个局部最优解,在左上角有一个全局最优解。初始样本点为5个,分别采用EI+MSP组合加点和单独EI加点两种代理优化算法来求解该函数的最小值,其收敛过程如图5所示(为方便比较,对目标函数值取对数)。
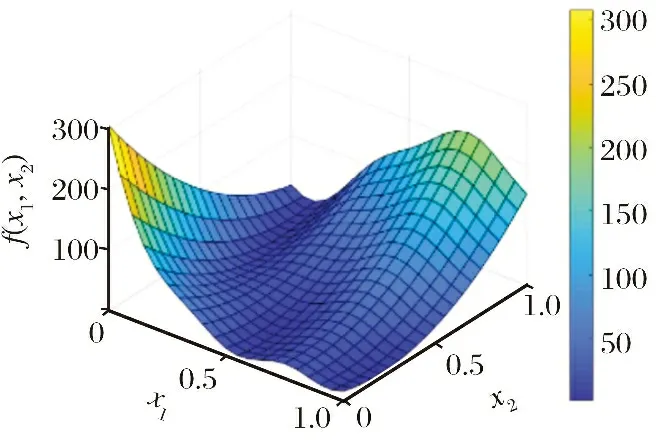
图4 Branin函数三维图

图5 收敛历程比较
可以看出,利用EI+MSP组合加点准则只需12次循环就可收敛至全局最优解附近,而EI准则需要13次循环才可以将最小值降低到2以下。在优化后期,由于EI准则具有较强的全局搜索能力,使得其很难在最优解附近进行充分挖掘,加点过程基本变为随机搜索。因此,在EI准则的基础上增加MSP准则可以很好地弥补EI加点难以收敛的局限性,使得全局搜索和局部挖掘得以平衡,达到更好的效果。
2.4.2 气动弹道计算测试
为了检验Kriging模型对不同外形方案下弹道计算问题的拟合能力,分别采用100个、 60个、 30个样本点,构建滑翔制导炮弹外形参数和最大射程之间的Kriging模型,并利用这三个模型对另50个样本点(与构建模型所用的样本点不重复)进行预测。样本点均采用拉丁超立方设计抽样获得。同时,对这50个预测样本点采用第1节的气动-弹道分析模型进行精确数值计算,其计算结果作为理论计算值与代理模型的预测值进行比较。
理论计算值与Kriging模型预测值的对比如图6所示,实线表示计算值与模型预测值完全相等的线,点距离实线越近表示计算值与预测值的偏差越小。由图6可以看出,除个别样本点预测值与计算值偏离较大以外,大部分样本点的Kriging模型预测结果与精确计算结果基本一致。当构建Kriging模型的初始样本点个数为100时,模型预测结果的平均误差为0.885%,当初始样本点分别为60个和30个时,平均误差分别为1.492%和1.850%,均小于2%。经过分析比较发现,若个别误差较大的点距离最优解较远,则对最终的优化结果影响较小,且增加相应的样本点数目可以有效提高Kriging模型的局部预测精度。因此,Kriging模型在一定的精度允许范围内能够代替复杂的气动-弹道计算程序。
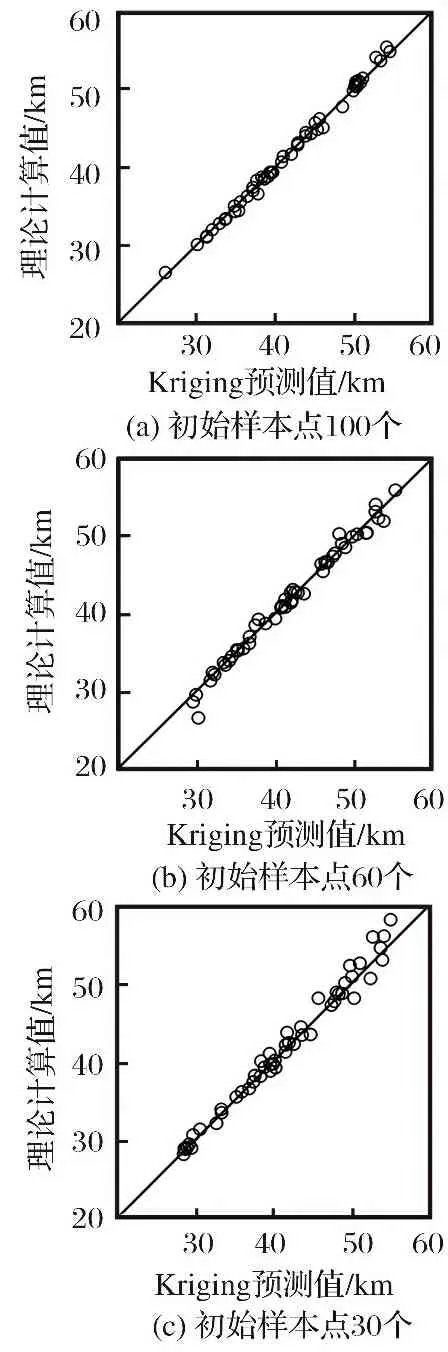
图6 预测值与计算值对比
3 算例分析
依据不同的任务需求,第1.3节所建立的滑翔制导炮弹气动-弹道综合优化数学模型也有着不同的目标函数和约束条件。本文分别以射程最大、 飞行时间短/控制能量消耗小为目标开展气动-弹道综合优化设计。
以某155 mm滑翔制导炮弹为例,炮弹质量40.4 kg,总长995 mm,头部长405 mm,其鸭舵和尾翼外形参数的变化范围如表2所示,构成了一个7维设计空间。
自适应hp-Radau伪谱法优化弹道时,假设滑翔启控点为弹道顶点,高度为20 km,弹道倾角为0°,速度为300 m/s。
优化是否收敛可根据代理模型在最优解附近的近似精度来判断:
(17)

表2 设计变量的取值范围
3.1 单目标优化问题
单目标优化可以看作是多目标优化中的特殊情况。当以射程最大为优化目标时,取=1,=0,=0,即目标函数为
=-()
(18)
约束条件如下:
(19)
首先,采用拉丁超立方设计在表1所示的设计空间中抽取样本数20个; 然后,对每一个外形样本采用第1节所述气动分析模型来计算其气动特性,再通过弹道分析模型进行方案弹道的设计。经过对20个样本点的学习构建出制导炮弹外形参数和最大射程之间的Kriging模型,并利用组合加点准则不断增加样本点,提高模型精度并搜寻最优解。
通过求解气动-弹道综合优化模型,收敛过程如图7所示。在优化过程中,每次循环给Kriging模型增加改善期望最大处和模型预测最小处两个样本点。当模型预测最小值的相对误差小于1.0×10时,输出为最优解。综合优化方案(Opt-1方案)的外形如图8所示,表3为综合优化结果。

图7 综合优化收敛过程(Opt-1方案)

图8 综合优化方案外形(Opt-1方案)

表3 综合优化结果(Opt-1方案)
作为对比,对基准外形也以射程最大为目标函数进行弹道优化。由表3可以看出,和基准方案相比,综合优化方案Opt-1的鸭舵和尾翼面积均有所增大,且两者至弹顶的距离都缩短了,从而可以提高升力并减小静稳定度。与此同时,Opt-1方案的鸭舵和尾翼的展弦比更大,可以有效提升炮弹的升阻比,符合“理想状况下,升阻比越大,射程越远”的规律。自适应hp-Radau伪谱法对Opt-1方案的弹道优化结果如图9所示。
图9(a)为制导炮弹的飞行轨迹图,制导炮弹经过弹道最高点后,近乎以直线滑翔。其中,Opt-1方案的最大射程可以达到60.9 km,基准方案的最大射程为44.2 km,通过综合优化使得滑翔距离增加了37.8%。图9(b)为控制变量攻角的变化曲线。刚开始滑翔时攻角逐渐增加,这是因为炮弹所处高度较高,空气密度小,大攻角下可以产生足够的升力。而Opt-1方案的攻角幅值小于基准方案,攻角曲线变化更为平缓。考虑到需用的攻角越小,炮弹的控制裕量就越大,Opt-1方案有着更好的控制效果。在弹道末段,攻角逐渐增加至最大值,这是为了延长落地时间,提高滑翔距离。此外,在控制量变化较为剧烈的区域,节点比较密集,而在控制量变化平缓的区域,节点较稀疏。这主要是hp自适应配点的作用,通过采样点曲率来判断是否增加配点数或细化区间。这样做可以兼顾求解精度和效率,提高Radau伪谱法的收敛速度。图9(c)为滑翔过程中弹道倾角的变化曲线。相较于基准方案,Opt-1方案的弹道倾角幅值较小,且变化均匀,这也可以从图9(a)中直观地看出,Opt-1方案的滑翔轨迹更为平直。图9(d)为速度变化曲线。在开始滑翔后,飞行速度逐渐减小,但由于重力分量的作用,速度又略微回升,最终缓慢下降,且Opt-1方案的落速小于基准方案。这表明射程的提高在一定程度上是以牺牲制导炮弹的动能为代价的。

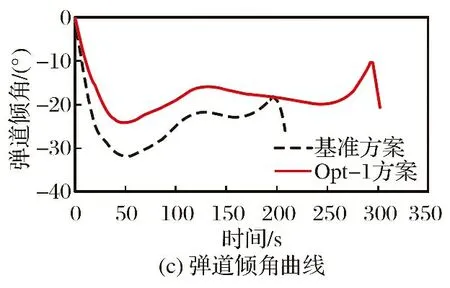
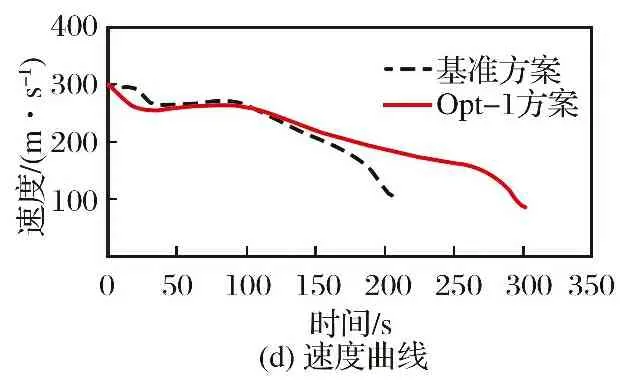
图9 弹道优化结果(Opt-1方案)
3.2 多目标优化问题
当攻击固定目标时,为了提高末端机动性,缩短飞行时间的同时往往需要兼顾能量消耗,在滑翔过程中应尽量节省能量。因此,目标函数取为时间和能量的函数:
(20)
式中:=0;=06;=04。
约束条件如下:
(21)
采用相同的优化流程,收敛历程如图10所示。观察图7和图10可以发现,在第四次循环时,相对误差都存在跳跃式增大,分析认为这是由于组合加点准则的全局搜索特性导致的,在第四次循环加点时从某个局部最优区域搜索进入了另一个区域。图11为多目标综合优化方案(Opt-2方案)对应的外形图。对基准外形也进行同样多目标的弹道优化作为对比,优化结果如表4所示。
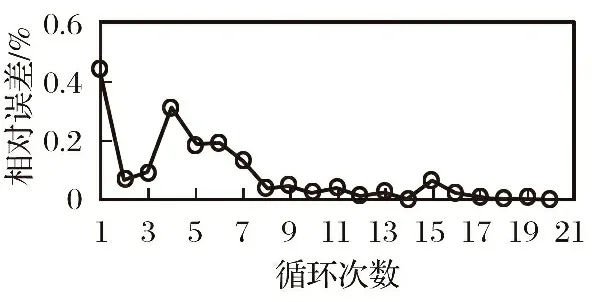
图10 综合优化收敛过程(Opt-2方案)
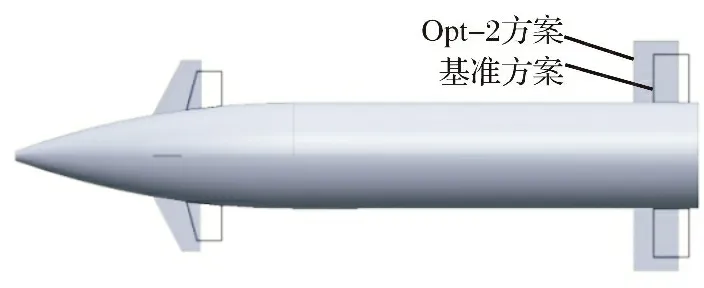
图11 综合优化方案外形(Opt-2方案)

表4 综合优化结果(Opt-2方案)
不难看出,和基准方案相比,Opt-2方案的鸭舵前缘后掠角增大,导致鸭舵的展弦比增大为5.42,鸭舵的根梢比提高至2.12。Opt-2方案尾翼的展弦比降低为2.74,其尾翼面积接近面积上限。Opt-2方案在马赫数0.5~0.9下的静稳定度约为4%~6%,符合设计要求。其飞行时间为112.33 s,略小于基准方案; 同时,其能量消耗降低了约46%。Opt-2方案的弹道优化结果如图12所示。
从图12(a)可以看出,Opt-2方案的弹道曲线比基准方案更接近一条直线。图12(b)为攻角随时间变化的规律,在整个滑翔过程中,Opt-2方案的攻角始终小于基准方案,攻角最大幅值也低于基准方案且更加平滑,这意味着优化后的制导炮弹减少了能量消耗,有着更大的控制裕量。而末端攻角的快速衰减是由于对末端弹道倾角进行约束所致,如图12(c)所示,最终弹道倾角降低至-40°,满足约束条件。观察图12(d)发现,由于滑翔初始攻角较小,受重力的作用,飞行速度快速上升,随着攻角增大,速度增加放缓并在45 s左右开始下降。Opt-2方案的速度在降低的过程中始终大于基准方案,最终落地速度为267 m/s,因此综合优化后有着更好的攻击效果。
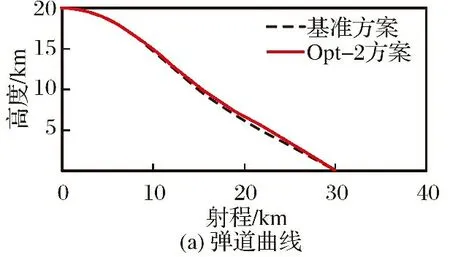
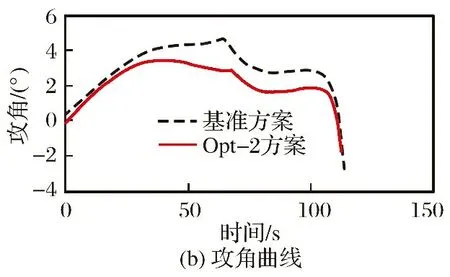
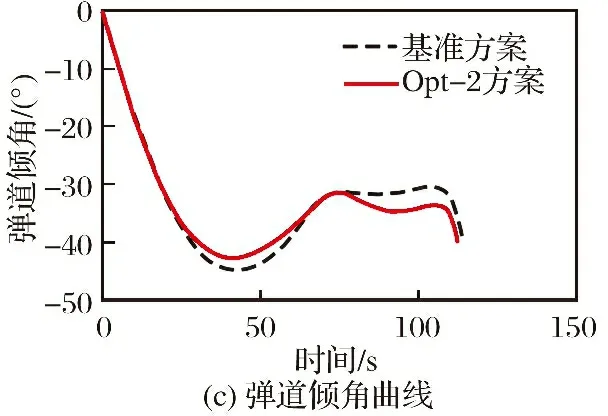
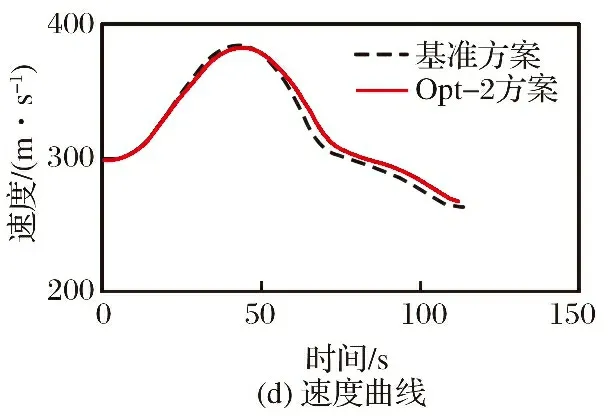
图12 弹道优化结果(Opt-2方案)
4 结 论
针对滑翔制导炮弹的气动、 弹道设计问题,本文研究了一种基于Kriging模型的气动-弹道综合优化方法,综合考虑了外形参数的静态优化和攻角控制规律的动态优化。以某155 mm滑翔制导炮弹的鸭舵和尾翼为优化设计对象,采用工程算法进行气动分析以及自适应hp-Radau伪谱法进行弹道分析,并通过基于Kriging模型的代理优化算法求解最优外形和最优弹道。分别以射程最大、 飞行时间短/能量消耗小为目标函数,通过仿真验证了该气动-弹道综合优化方法的可行性。
结果表明: (1)本文所构建的Kriging模型能很好地代替气动-弹道计算过程,对不同方案最大射程的预测精度较高。基于Kriging模型和EI+MSP组合加点准则的代理优化算法收敛效果较好,可满足约束条件。(2)和基准方案相比,经气动-弹道综合优化后的Opt-1方案使射程提高了37.8%,Opt-2方案在攻击固定目标时能有效减少飞行时间并使能量消耗降低了46%。本文研究可为滑翔制导炮弹的设计与研制提供一定的理论参考。
