蛋品质图像检测自动传送装置的设计*
2022-10-09于亚萍韩雅文李留安
余 念,于亚萍※,刘 源,韩雅文,李留安,赵 喆
(1.天津农学院工程技术学院,天津 300384;2.天津农学院动物医学与动物科学学院,天津 300384;3.金洼农业科技发展有限公司,天津 300273)
0 引言
随着社会经济的快速发展,食品安全问题得到了广大民众的关注。鸡蛋作为人们日常生活中每天都摄入的食物,其对蛋品质的质量要求就越来越高。传统的人工肉眼对蛋品质进行检测的方法,分拣速度慢,而且受主观因素影响大,分拣标准不统一,已经满足不了社会需求,亟需采用自动化检测与分拣方式。现阶段,国内外普遍采用的检测方法有:机器视觉技术检测、光学特性检测、声学冲击特性检测及介电特性检测等[1-2]。基于图像处理的蛋品质检测技术越来越成熟,主要检测鸡蛋的品质参数有重量[3]、蛋形指数[4-5]、裂纹[6]、脏蛋[7]、新鲜度等[8-9]。张世庆[4]通过应变片式传感器动态检测质量,用图像处理的方法检测鸡蛋长短轴。通过提取的图形进行R-B色差法对R-B图像进行自适应图像阈值分割,图像中存在的其他非目标小区域可采用面积阈值方法直接去除,对每个连通域进行处理后,计算鸡蛋区域外接矩形,通过外接矩形长、宽可得到鸡蛋长轴和短轴,并计算蛋形指数。魏萱[6]使用工业摄像头完成对鸡蛋的数字图像采集,通过高斯滤波器、灰度处理等方式将鸡蛋图像进行预处理;然后使用灰度共生矩阵处理图像,完成对鸡蛋图像纹理特征的提取;通过纹理特征的参数作为分类依据,用簇类独立软模式法、线性判别分析和偏最小二乘支持向量机等方式对鸡蛋进行裂纹识别。通过这样的方式处理得到的数据更加精确,能够最大限度地提高检测精度,但该方法侧重于检测方法的研究,没有将检测过程自动化和可视化。在鸡蛋品质的无损检测上,检测的吞吐量主要依赖可靠的自动传送装置,本设计基于图像检测完成了一套对鸡蛋进行传送的系统,实现了对鸡蛋的自动传送,并通图像处理完成了鸡蛋的纵横径及蛋壳颜色检测。
1 自动传送装置系统组成
自动传送装置主要外设由57 步进电机[10-11]、驱动器DM542、滑台、暗箱、托盒、LED 灯、电源模块和摄像头组成。控制设备由Arduinor3 开发板、电机扩展模块和PC 机组成。工作流程:由可编程序烧录后的Arduinor3 开发板驱动电机带动滑台完成传送工作将滑台上的鸡蛋托盒送入图像检测装置;进入暗箱后,通过托盒中3×3LED 灯矩阵对鸡蛋进行透射;从鸡蛋进入暗箱检测到出暗箱这一过程中进行多次拍摄,每一次可采集一组(9 个鸡蛋)图片数据;最后通过PC 端的Matlab 软件对采集的图像进行处理,得出鸡蛋品质检测结果。系统组成如图1所示。
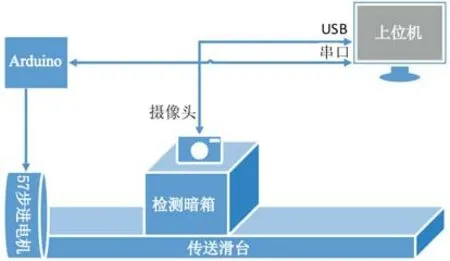
图1 系统组成
2 自动传送装置硬件电路设计
2.1 检测部分硬件设计
图像检测单元有LED灯光源、鸡蛋托盒、暗箱和摄像头组成,鸡蛋托盒(图2(a))作为鸡蛋承载体,该装置能将鸡蛋稳定地盛放在灯光的照射下,使鸡蛋在黑暗的环境中能将轮廓显现出来[12-13]。托盒的主要制作材料为亚克力板,一次能盛放9 个鸡蛋,规格为180 mm×180 mm×100 mm。检测暗箱(图2(b))作为检测装置的关键外设,可以避免环境因素给鸡蛋检测结果带来的影响,暗箱的主要制作材料为亚克力板。摄像头采用USB接口,能直接连接计算机进行图像采集,分辨率为1 024×1 080。通过该设备能完成对鸡蛋图像的采集工作,同时将采集到的图片上传到PC机,为检测鸡蛋做准备。
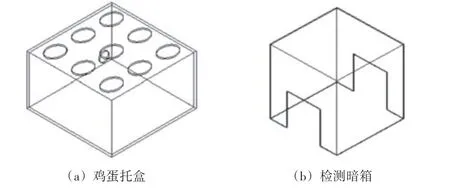
图2 鸡蛋托盒与检测暗箱设计
2.2 鸡蛋自动传送装置
电机滑台采用FSL40定制方案设计(图3),开放式丝杆模组,精度可达0.03 mm,最大水平负载50 kg,最大水平速度500 mm/s,有效行程为1 500 mm。它能在电机的驱动下带动托盒上的鸡蛋移动,平稳地将鸡蛋送入检测装置,在指定位置静止,为摄像头拍摄清晰照片提供时间。

图3 电机滑台实物
整个传送装置电路由开发板电路与电机驱动电路两部分组成。在开发板电路中分别有电源电路、主控芯片电路、步进电机驱动信号电路、按键控制电路加上屏幕接口电路。在电机驱动电路中有电源电路和驱动器信号电路。步进电机驱动器采用DM542,驱动57BY 步进电机带动滑台传送鸡蛋,电路连接如图4所示。

图4 传送装置电路
3 自动传送装置软件设计
3.1 系统工作流程
系统软件工作流程如图5 所示。第一步检查装置的安全性;待检查完毕后给装置通电,观察状态灯是否正常亮起,若未正常亮起则断开电源,再次检查装置,若正常亮起则启动传送装置;点击电机启动按钮,电机启动,鸡蛋托盒向暗箱移动,观察摄像头画面,查看鸡蛋托盒是否进入检查暗箱中心位置,若未到达中心位置则继续移动,若到达则按下停止按钮,电机停止;点击图像采集按钮,观察图像采集界面,查看图像采集是否完整,若不完整则再次点击采集按钮,直至图像完整即可;点击图像处理按钮,图像依次进行灰度处理、二值化处理、纵横径测量和蛋壳颜色判别,最后将检测结果在上位机上显示;按下电机换向按钮,传送装置反向移动,直至完全出现在暗箱外停止,这样就完成了一组鸡蛋的检测工作。最终,通过实验,确定出鸡蛋传送到拍摄位置的时间,并静止稳定拍照后,再传送出暗箱。可实现手动和自动控制。
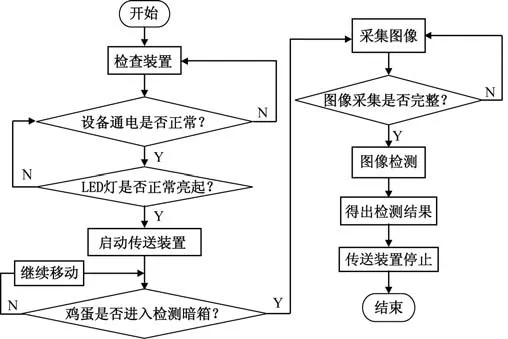
图5 系统软件工作流程
3.2 电机控制软件设计
电机控制软件设计基于Arduino 开发板进行。软件功能设计主要分为电机启停、速度调节和运动方向3 个方面。电机启停通过对电机使能信号的控制;速度调节主要通过控制脉冲信号,对脉冲进行分频设定以实现速度多级调节;运动方向是直接控制电机的方向信号。程序流程如图6所示。
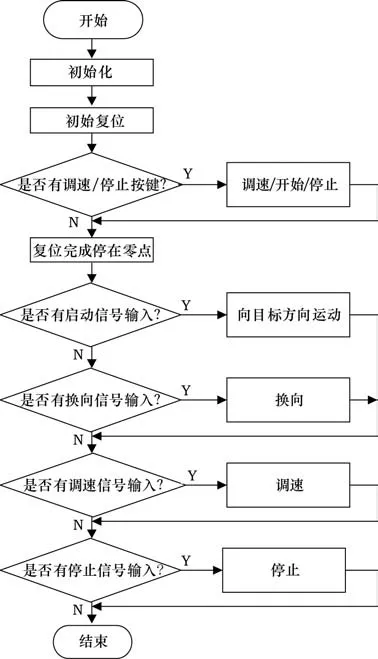
图6 电机控制程序流程
3.3 检测系统功能设计
设计人机交互界面可以更加直观地将鸡蛋检测过程呈现出来,同时能更加方便地对装置进行控制。该设计基于Matlab中App design 平台开发,界面共有5 个显示区域和4 个功能按键。显示区域包括摄像头实时画面、采集图像、二值化图像、检测完毕图像和检测结果数据栏;功能按键分别为打开/关闭摄像头、图像采集、程序复位。界面中所有控件的回调函数都对应着每一项功能程序,通过执行控件去完成对图像的处理。
本系统通过对鸡蛋的纵横径检测和蛋壳颜色识别两个方面的功能对装置运行情况进行检验。蛋形指数检测采用图像分割处理、灰度处理、二值化处理和纵横径测量4 个步骤。检测结果如图7所示。
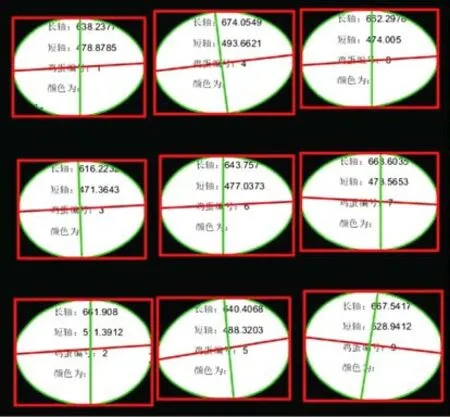
图7 纵横径检测结果
蛋壳颜色识别如图8 所示。在颜色识别上,对蛋壳颜色为白色、黄色、青色3 种颜色的鸡蛋进行识别,通过多次实验得出3种颜色在LED 灯光照射下呈现的颜色色域进行识别,调节色域值可判断出红色面积占比大的为黄色蛋,黑色面积占比大的为青色蛋,剩下的为白色蛋。

图8 色域分析
4 实验测试结果比对
通过对整个装置的实验,检测得到了一些鸡蛋相关的数据。对所检测的鸡蛋实际数据与实验所得的数据进行比对分析。抽取其中一组鸡蛋进行验证分析,如表1 所示。通过对比分析,可以看出实验所检测出的结果与实验结果没有特别明显的误差,在鸡蛋颜色区分上基本能实现100%鉴别,在纵横径测量上误差相对较小,偶尔出现偏差过大的情况,如表1 中5号鸡蛋,由于摄像头不稳定,鸡蛋图像中5 号蛋轮廓不清晰,造成检测数据与实际偏差过大。
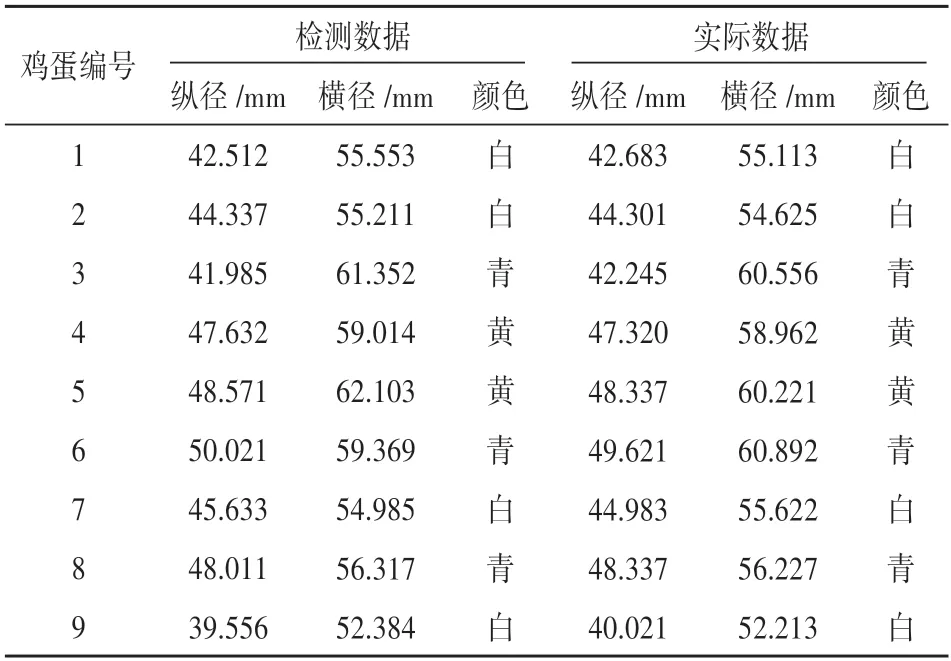
表1 实验数据对比分析
5 结束语
本文主要完成了基于图像检测自动传送装置的设计,包括对鸡蛋检测环境、自动传送部分和上位机显示与控制部分进行了设计。通过装置对鸡蛋纵横径检测与蛋壳颜色的识别进行了实验,并将得到的实验数据与实际测试结果进行对比分析,本装置基本可以完成预期目标。但本装置存在以下不足:一是装置的工作效率偏低;二是检测参数偏少。本次设计一次只能检测9 个鸡蛋,并且只完成了对鸡蛋纵横径测量和蛋壳颜色鉴别两种品质参数的检测工作。后续工作可以在提高效率与蛋品质参数多样化方面进一步研究。
