船舶陀螺减摇器减摇性能的全系统数值仿真研究
2022-10-09隋芳芳董宇豪
李 彪,隋芳芳,董宇豪,王 磊,王 柏,王 军,陈 宁
(1.江苏科技大学 能源与动力学院,镇江212100)
(2.江苏科技大学 深蓝学院,镇江 212100)
(3.中华人民共和国唐山海事局,唐山 063611)
海上风、浪、流等海况因素的影响,使得在海上航行和工作的船舶产生横摇、纵摇等摇摆运动,这些不规则的摇摆运动会对船舶的稳性、耐波性及阻力特性产生不利的影响,从而影响船舶的航行、锚泊及作业安全,也会影响货物的配积载,乘员的舒适性及机械设备的正常运转等[1].特别对于军用舰船、起重船、客轮、救助船等对稳定性要求较高的特殊船舶,该问题尤为突出[2].为了降低船舶的摇动,国内外研究者及企业已经开发了多种类型的船舶减摇技术及装置,主要包括舭龙骨、减摇鳍、舵减摇、减摇水舱和减摇陀螺等[3].这些装置根据其安装位置可分为外部装置和内部装置.外部装置是安装在船体外侧,通过减摇装置与水之间的水动力作用,对船体产生减轻船舶摇摆的力和力矩作用,如舭龙骨、减摇鳍、舵减摇等[4-5].内部装置通常安装于船体内部,依赖于装置本身产生力和力矩而达到船舶减摇的目的,如减摇水舱和陀螺减摇器等[6].
船舶陀螺减摇器是利用高速旋转的陀螺转子的进动作用产生减摇力矩,从而减轻船舶的摇动,陀螺减摇器最早为一种被动式装置.1911年,美国Sperry公司对被动式陀螺减摇器做了改进,在陀螺框架上加了强制进动作用,变为主动式装置,该装置于1915年安装于游艇上,试验结果表明,该装置具有较好的减摇效果[7].
与减摇鳍等外部装置相比,减摇陀螺没有船外附体,无因此而带来的附体阻力,在船舶全航速区间都有较好的减摇性能.与减摇水舱相比,减摇陀螺的重量,体积均较小,减摇效果更佳,对船舶稳性基本没有影响,布置灵活,特别适于在现有船舶上安装.长期以来,由于船舶减摇陀螺器结构复杂、材料要求高,造价昂贵,一直没有得到大规模应用.近年来,随着新技术、新材料的应用及制造工艺的进步,陀螺减摇技术又重新得到重视.
目前对船舶陀螺减摇器的研究方法主要包括动力学仿真、系统控制和海上模型试验等.对于船舶陀螺减摇器的动力学仿真,现有的研究通常是建立陀螺减摇器和船舶之间的机械动力学模型,船舶在波浪上的运动则采用船舶运动模型方程来表示,在模型方程中增加干扰激励项来表征船舶所受到的波浪激励力和激励力矩,方程通常不需要求解流体力学方程,许多水动力参数来自于船模或实船试验总结得到的经验值或近似值,该方法具有原理清晰,计算简捷的优点,但由于依赖于试验数据或经验数据,因此精度较差,应用范围受限.系统控制研究则主要侧重于船舶陀螺减摇器的控制策略及控制律的设计[8-10],该方法也是以船舶运动模型方程为基础.海上或模型试验是装置研发最直接的途径,但存在成本较高,时间较长,测试数据易受到不确定因素影响的劣势.为了更直观全面的阐释陀螺减摇器的减摇原理和减摇性能,文中采用陀螺减摇器—船舶—波浪的全系统流体力学仿真的方法,对安装于某港作拖船上的陀螺减摇器的工作性能进行研究,并探讨波浪状况、陀螺动量矩等因素对陀螺减摇器减摇性能的影响规律.
1 系统运动控制方程及减摇机理
与船舶其他角位移运动相比,由于横摇的阻尼较小,横摇幅值通常最大,且在恶劣海况下,剧烈的横摇和横风横浪对船舶安全性的影响也最为严重,所以船舶横摇的性能是评判船舶性能优劣的一个重要指标[11].
船舶陀螺减摇器的主体结构可以分为固定体和旋转体两种,固定体包括底座、壳体、外支架、电机及其他附属设备等,旋转体则主要是陀螺转子.陀螺减摇器通过贯穿螺栓将底座等固定体与甲板连接在一起,从而与船体组成整体.陀螺转子高速旋转所产生的作用力矩即可通过减摇器固定体传递给整个船体,从而对在波浪上船舶的摇动产生抑制作用.
陀螺减摇器通过陀螺转子旋转施加给船舶的力矩而发挥减摇效果,在波浪-船舶-陀螺减摇器的全系统耦合模型中,其减摇效果主要通过陀螺减摇器转子与船舶之间的固固耦合作用和波浪与船舶之间的流固耦合作用来实现.
为了更直观阐释陀螺减摇器的减摇原理,文中建立包括陀螺减摇器的船舶横摇运动数学模型.
(1)
(2)
K2(φ)=W·GMsinφ≈W·GM·φ
(3)
式中:W为包括陀螺减摇器固定体在内的船舶的重量;GM为船舶初稳性高度.
减摇陀螺对船舶横摇恢复力矩可以表示为:
(4)
式中:β为减摇陀螺进动角;α为陀螺转子转速,当只考虑船舶的横摇运动时,β=φ.因此:
(5)
其中:JR为陀螺减摇器转子的转动惯量,L=JRα,为陀螺减摇器转子的动量矩.将式(2、3、5)代入式(1)中,可以得到:
(6)
由式(6)可知,陀螺减摇器的作用相当于增加了水对船舶的横摇阻尼力矩,其大小等于陀螺减摇器转子的转动动量矩,即取决于陀螺减摇器转子的转动惯量JR和转子转速α.
为了进一步的对该方程进行分析,进行线性波的假定,此时,波浪激励力矩Mwave和波浪横摇角位移φ可以分别用复数的形式表示为:
Mwave=M0e-iωt,φ=φ0e-iωt
(7)
式中:M0和φ0分别为波浪激励力矩幅值和船舶横摇幅值;ω为波浪圆频率;e为自然常数;i为虚数单位.
将式(7)代入式(6),消去久期项e-iωt,进行处理可以得到:
φ0·W·GM-φ0ω2(Ixx+Jxx)-φ0iω(Kφ+L)=M0
(8)
求解得到:
(9)
对φ0取模,即得到船舶横摇运动的实数幅值:
(10)
通过式(10)可以看到,船舶在一定的装载状况和工况下,其横摇幅值只与波浪激励力矩和陀螺转子的动量矩有关.
在文中,将减摇陀螺的减摇率定义为船舶减摇前后的平均横摇幅值差与减摇前的平均横摇幅值之比.增大陀螺转子的动量矩,能够减小船舶的摇动幅值.且陀螺转子在较小的波浪激励力矩的条件下,可以获得更高的减摇率.
2 数值仿真模型
2.1 数值仿真方法
安装有陀螺减摇器的船舶在波浪激励下的运动分析实质上属于浮基多体系统的流固耦合动力分析的范畴,船舶与陀螺减摇器通过力和力矩的相互作用施加影响.文中建模及数值仿真采用有限元分析软件STAR-CCM+,流体采用多相流模型,船舶在波浪中的运动采用DFBI (dynamic fluid body interaction)六自由度运动模型[13-14],陀螺减摇器转子与船舶的相互作用采用DFBI多体耦合的旋转关节模型.
由于船舶和减摇陀螺的运动状态较大,这一特点使得在多相流模拟中,要求自由液面附近的网格具有很高的分辨率,文中采用船舶和减摇陀螺器的动态重叠网格的动网格技术来解决动边界的网格自动化生成技术[15-16],采用流体体积法(volume of fluid,VOF)对两相流分界面进行捕捉.
2.2 仿真对象及工况
陀螺减摇器的物理模型如图1,该陀螺减摇器的结构尺寸参照GSZR-Ⅱ型减摇陀螺器,主要参数如表1.
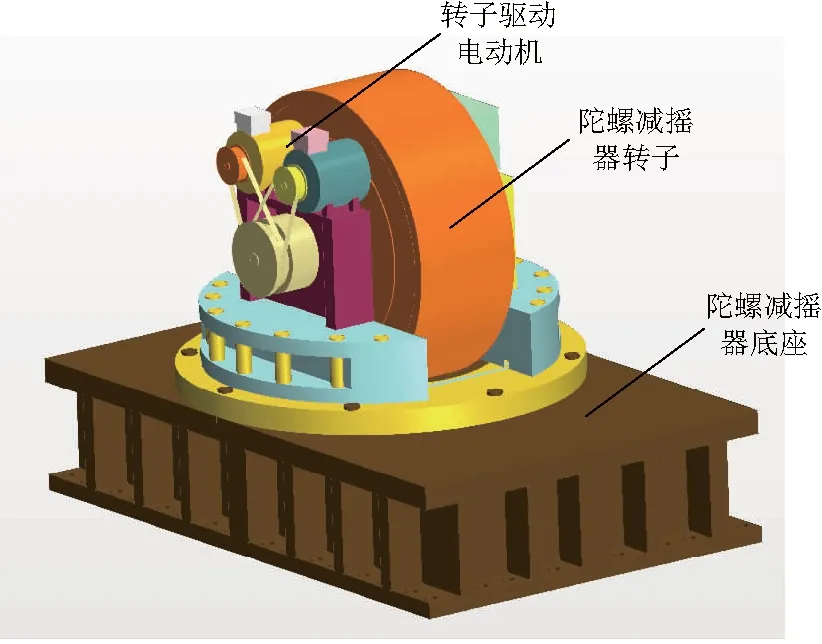
图1 陀螺减摇器物理模型
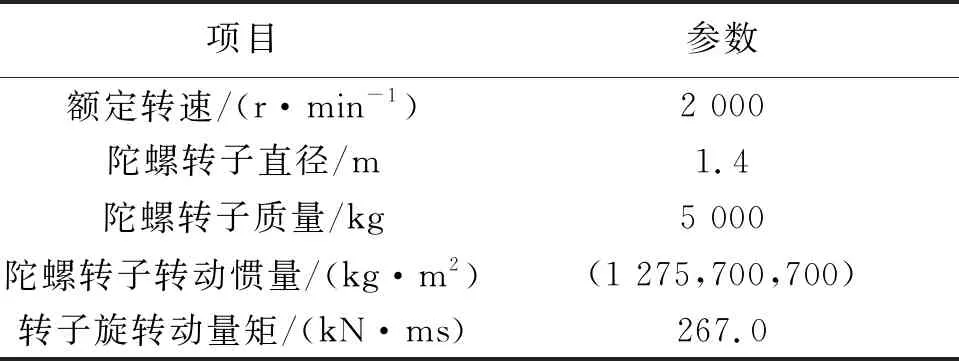
表1 陀螺减摇器转子主要参数
考虑到该规格陀螺减摇器对船舶的适用性,文中针对在唐山港京唐港区运营的某3200HP全回转拖轮进行仿真,船舶主要参数如表2.
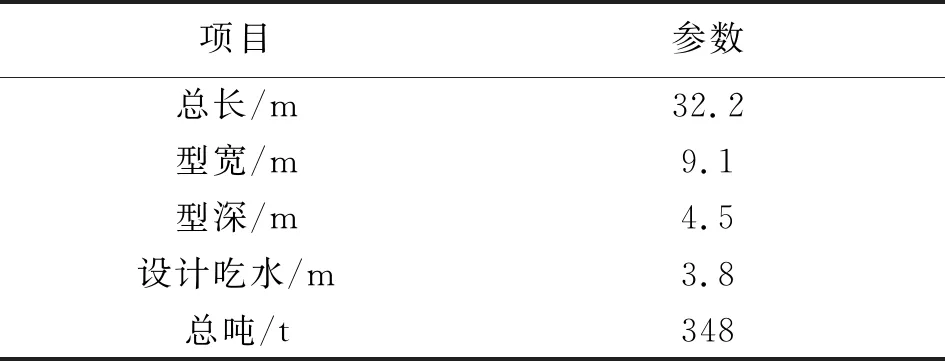
表2 仿真船舶主要尺寸
为了使数值仿真结果贴近实际,文中所建立的船舶仿真模型中的船舶型线、舵、桨及舭龙骨等影响船舶运动特性的结构及尺寸等均与实船一致.
陀螺减摇器安装在船舶的主甲板上,陀螺减摇器转子中心距船艏垂直距离为20 m,距主甲板垂直距离为0.75 m.所建立的船舶—陀螺减摇器仿真模型如图2.
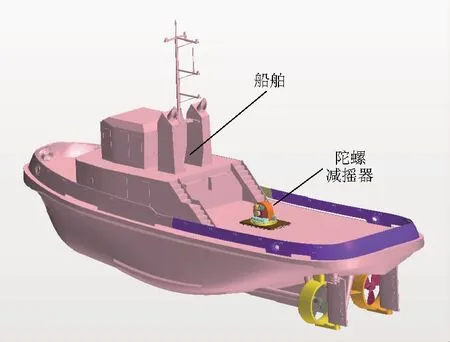
图2 船舶—陀螺减摇器仿真模型
该数值仿真模型属于海洋多体浮式结构物的范畴,具体包括漂浮于波面的船体(包括与船体固接于一体的陀螺减摇器的固定体)和陀螺减摇器的转子两组实体.在仿真计算中,陀螺减摇器的转子和固定体是通过多体耦合,旋转轴的方式实现连接.通过该多体耦合技术,可以将陀螺减摇器转子旋转所产生的作用力矩通过旋转轴传递给船体.
建立三维数值波浪池,采用重叠网格的方法,对计算域网格进行划分,并加密波面处的网格,如图3,计算域尺寸为200 m×100 m×32 m,坐标系的原点O位于船舶设计吃水水线面的中心位置,即船舶所在水域水深为16 m.计算中,采用Pierson-Moskowitz(PM)不规则波波谱.
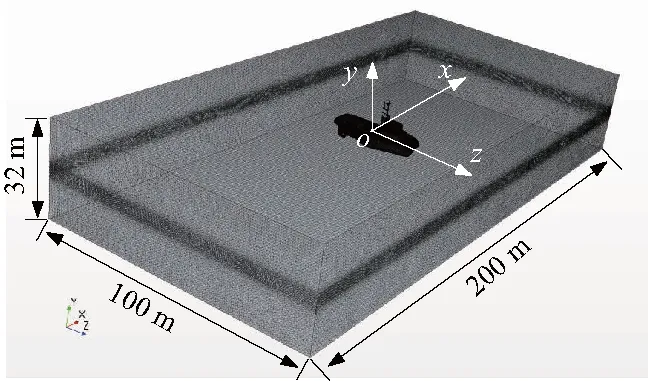
图3 计算域网格划分
图4为数值仿真中安装有陀螺减摇器的拖船在波浪上运动的标量图.文中暂不考虑航速的影响,只探讨船舶在锚泊工况下陀螺减摇器的减摇效果.
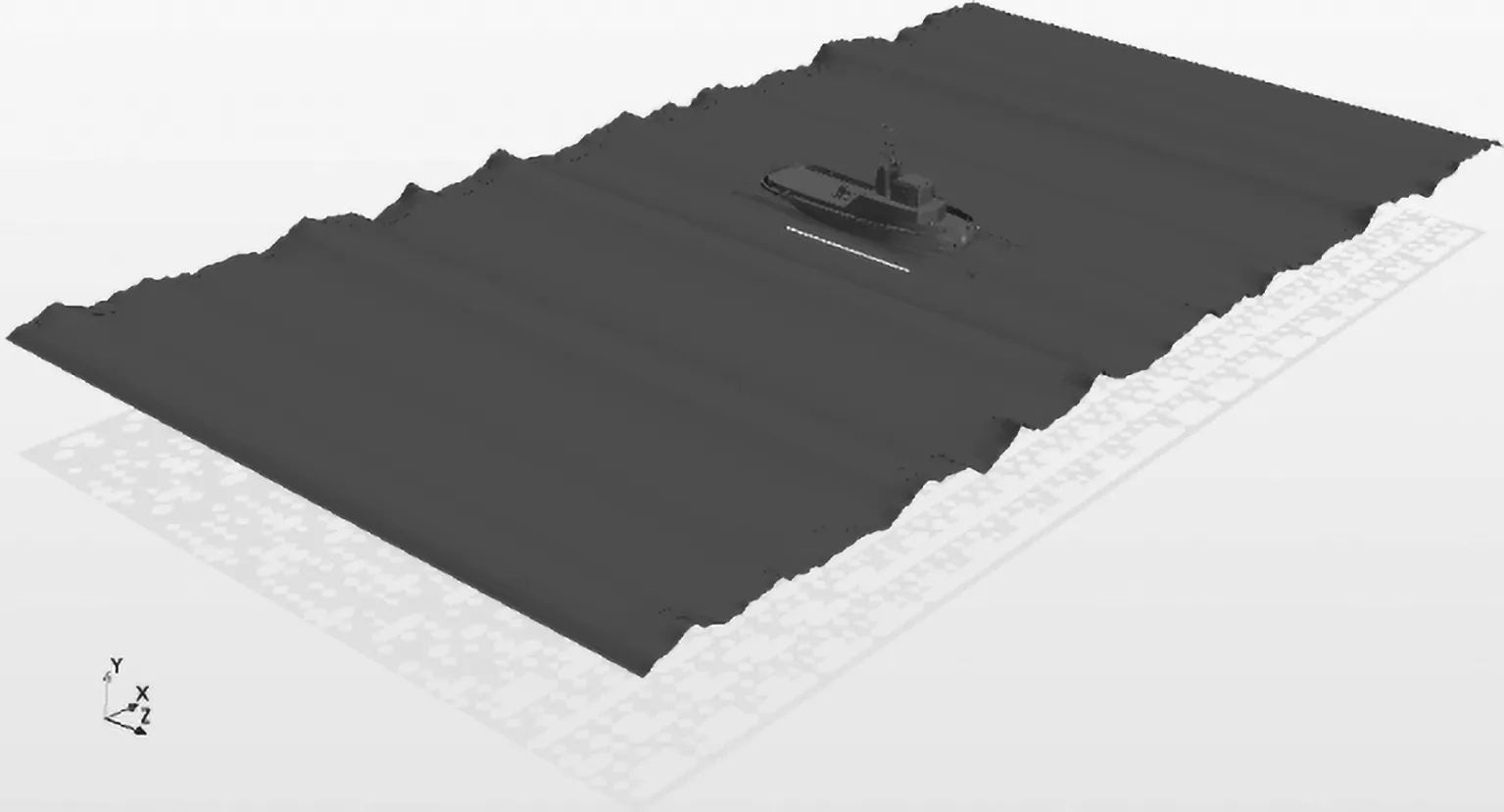
图4 数值仿真标量图
3 结果分析与讨论
为了确保数值仿真结果的可信性,文中在对数值仿真进行网格无关性和步长独立性验证之外,还对未安装陀螺减摇器时的3200 HP全回转拖船仿真模型的横摇运动仿真结果与相同工况下实船的海试数据进行了对比,图5、6分别是在有义波高h1/3为1.5 m、周期T为4.0 s、φ为横摇角度、船舶在90°横浪时,实船横摇运动时域曲线和文中数值模拟得到的船舶横摇运动时域曲线.由图可见,船舶在波浪中的横摇运动周期与波浪周期一致,实船试验的横摇运动平均幅值为7.82°,仿真得到的船舶横摇运动平均幅值为8.10°,误差约为3.6%,实船试验与数值仿真得到的船舶横摇运动的关键参数吻合较好,可以验证本文数值模拟方法的可信性.
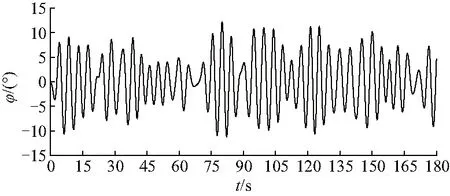
图5 实船横摇运动时域曲线
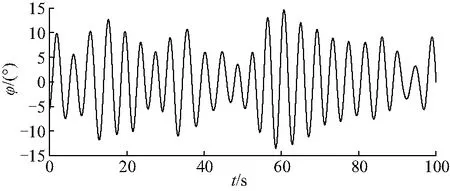
图6 数值仿真横摇运动时域曲线
3.1 转子转速的影响
从式(10)可以看到,陀螺减摇器转子转动动量矩的改变,会对船舶的横摇运动产生不同的抑制作用.对于某固定型号的陀螺减摇器,转子的转动惯量通常不变,一般是通过改变转子的转速来改变转子转动动量矩.如图7,在90°浪向角(有义波高h1/3为1.5 m,周期T为4.0 s)时,转子在不同转速下船舶的横摇运动时域曲线.如图8,随着陀螺减摇器转子转速的提高,船舶平均横摇幅值持续减小,减摇率持续提高.当转子转速n达到额定转速2 000 r/min时,船舶横摇幅值为2.9°,减摇率为64.2%.
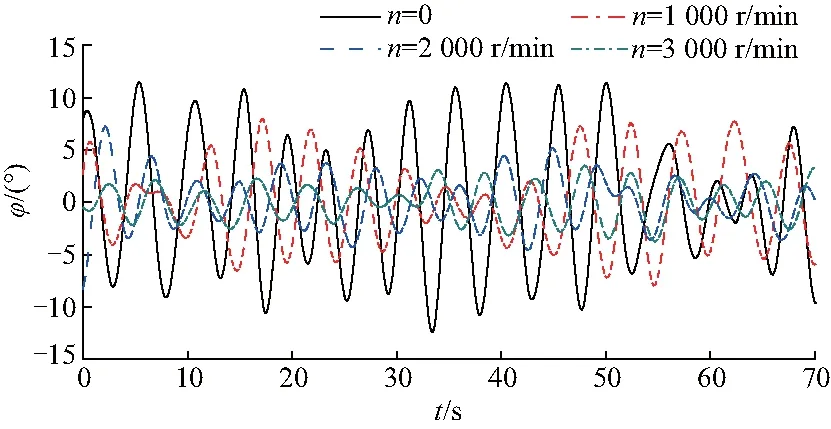
图7 转子不同转速下,船舶横摇时域曲线

图8 转子转速对陀螺减摇器减摇效果的影响
3.2 波浪有义波高的影响
图9为波浪周期T为4 s,有义波高h1/3分别为0.5、2.0、3.5 m时,船舶在减摇陀螺器减摇前(转子转速为0)和陀螺减摇器减摇后(按照额定转速2 000 r/min运行),船舶横摇运动的时域曲线,h1/3=1.5 m时的曲线见图7.

图9 船舶减摇前和减摇后的横摇时域曲线
图10为通过数值仿真计算得到的有义波高变化时,陀螺减摇器的减摇效果曲线.由图可知,在本文所选取波高范围中,陀螺减摇器均具有较为显著地减摇效果,且在转子转速一定时,波高越小,陀螺减摇器的减摇率越高.
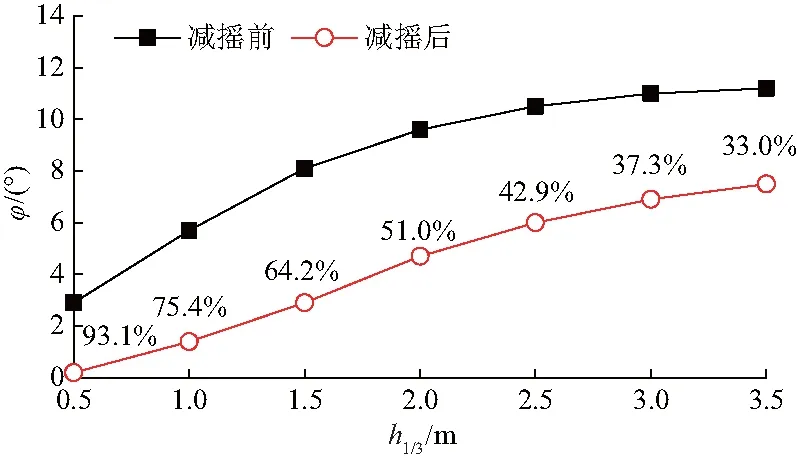
图10 有义波高对陀螺减摇器减摇效果的影响
3.3 波浪周期的影响
图11为有义波高h1/3为1.5 m,波浪周期T分别为2.0、3.0、5.0 s时,船舶在减摇陀螺器减摇前(转子转速为0)和陀螺减摇器减摇后(按照额定转速2 000 r/min运行),船舶横摇运动的时域曲线.由图可知,波浪周期从2 s增加到5 s时,船舶横摇幅值持续增大,陀螺减摇器在各个周期下均具有一定的减摇效果.从图12中的减摇率可以看到,波浪周期越大,陀螺减摇器的减摇率越低,即在周期较小的波浪中,陀螺减摇器可以获得更佳的减摇效果.

图11 船舶横摇时域曲线
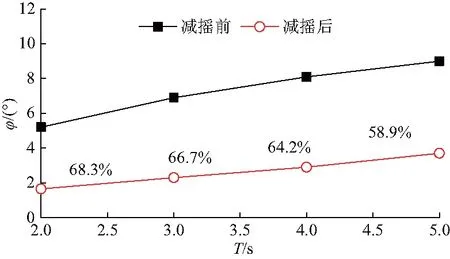
图12 波浪周期对陀螺减摇器减摇效果的影响
3.3 浪向角的影响
图13为船舶在30°和60°浪向角(船舶艏艉方向与波浪传播方向的夹角)时,陀螺减摇器未运行(转子转速为0)和陀螺减摇器按照额定转速运行时(转子转速为2 000 r/min),船舶横摇运动的时域曲线(波浪周期T为4.0 s,有义波高h1/3为1.5 m).图14为不同浪向角下的减摇率.由图可知,在波况不变的条件下,当波浪浪向角从30°增大到90°时,船舶的横摇运动幅值从2.2°增加到8.1°,在陀螺减摇器的减摇作用下,船舶的横摇运动幅值均有一定的减小,减小后的船舶横摇幅值为0.4°到2.9°.同时,横摇幅值减小量持续增大,从1.8°增加到5.2°;横摇幅值减小率则持续减小,从81.8%减小至64.2%.
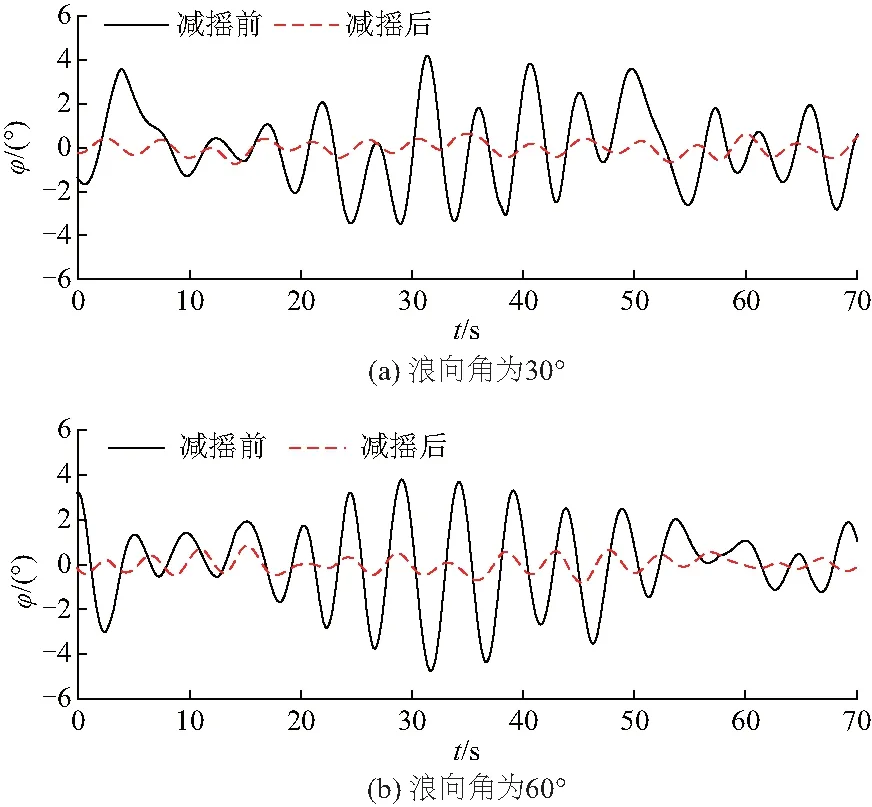
图13 船舶横摇时域曲线
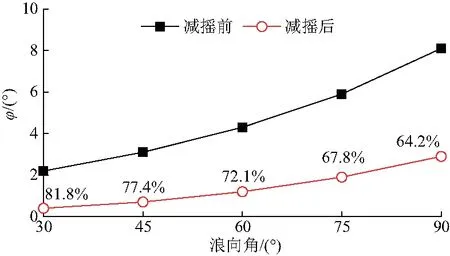
图14 波浪浪向角对陀螺减摇器减摇效果的影响
通过总结波浪波高、周期和浪向角对陀螺减摇器减摇效果的影响可知,陀螺减摇器在一定的工况下,船舶横摇幅值越小,减摇率越高.
4 结论
(1) 船舶在一定的装载状况和工况下,其横摇幅值只与波浪激励力矩有关和陀螺转子的动量矩有关,船舶所受的波浪力矩较小时,可以获得更高的减摇率;
(2) 陀螺减摇器在多种工况下均具有显著的减摇效果,减摇率受到陀螺减摇器工作参数、海况参数等因素的影响.
(3) 陀螺减摇器的减摇率随着转子转速的增大而增大,随着有义波高、周期及浪向角的增大而减小;船舶横摇幅值的减小量则随着浪向角的增大而增大.
