运动式单摄像机BSV及其结构表面裂缝测量应用
2022-10-09梁一星
马 骅,梁一星,杨 光
(河南省高速铁路运营维护工程研究中心,河南 郑州 450000)
0 引 言
表面裂缝测量是交通、结构及铁道工程等领域的常见问题,如道路表面裂缝[1]、建筑结构表面裂缝以及钢轨表面裂纹的测量等[2]。根据相关技术规范[3],裂缝测量一般是指裂缝的最大宽度测量。
传统表面裂缝测量方法包括目测显微镜法、超声波法以及传感器法等[4]。目测显微镜法是指采用裂缝显微镜,使用时将显微镜贴合于裂缝上方,该方法精度较高,但主观性较强且效率不高;超声法[5]同样存在需贴合操作、使用不便的问题;传感器法是指通过施工前在结构表面铺设移传感器,该方法成本较高,往往单个传感器只能监测单出裂缝,一般适合关键结构处的实时裂缝监测[6]。随着近年计算机视觉与数字图像处理技术发展,基于摄影测量的结构表面裂缝检测技术取得了广泛应用[7]。
摄影测量法指使用视觉传感器采集裂缝表面的二维图像信息[8],然后根据图像信息反馈裂缝的几何尺寸信息,该方法需要保持摄像机像平面严格平行于裂缝表面,否则会引起较大误差,而BSV技术通常可较好避免此问题[9]。为进一步提高上述测量方法的便捷性,笔者提出一种基于运动式单摄像机BSV系统的结构表面裂缝测量方法,使用一个摄像机从两个不同角度拍摄裂缝图像,再结合特征匹配、摄像机运动估计以及图像边缘特征提取方法,以期实现裂缝的高精度、自动化测量。
1 测量方法与基本原理
1.1 测量指标
对于裂缝一侧边缘的一点Xi=(xi,yi,zi)T,可按式(1)计算该点到另一侧的宽度:
(1)

Xi到裂缝另一侧所有Yj点的最小值,即为Xi点处对应的裂缝宽度[4],而裂缝一侧所有点对应的di中的最大值,即所谓“最大宽度”,为整个裂缝的几何宽度指标,这个宽度就是笔者所提出的运动式单摄像机BSV方法的测量目标。
1.2 测量方法
测量方法如图1,使用摄像机从1、2两个位置分别拍摄同一裂缝图像,就可对裂缝边缘某点的空间三维坐标进行求解,进而可按照式(1)完成裂缝的最大宽度测量。
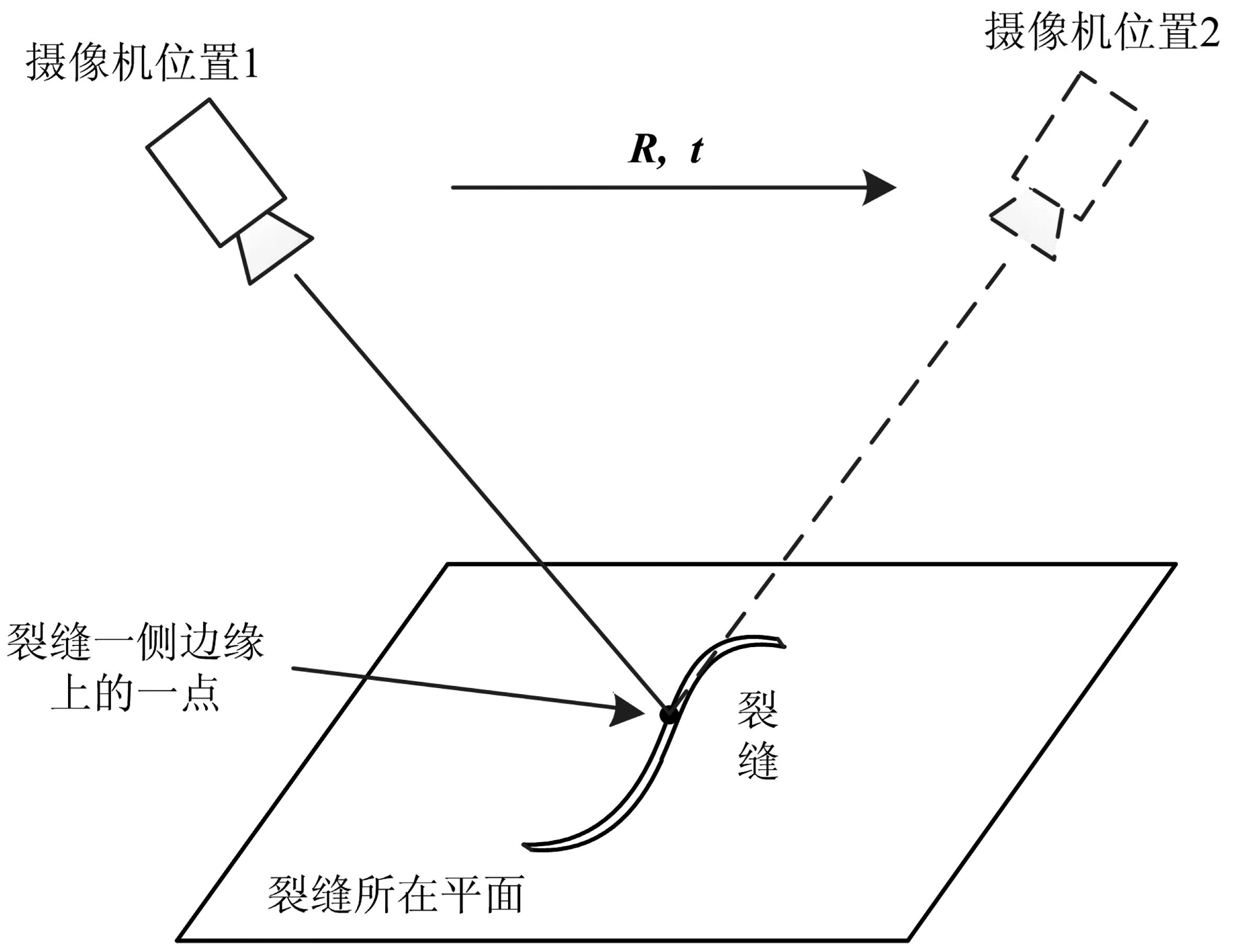
图1 运动式单摄像机BSV裂缝测量方法示意
1.3 运动式单摄像机BSV的基本原理
运动式单摄像机BSV实际上是BSV的一种推广,本节对此进行说明。
如图2中,空间点X(所在坐标系为世界坐标系)在摄像机1和2两个位置的相平面的投影像点为x1=(u1,v1)T和x2=(u2,v2)T(所在坐标系为二维图象平面坐标系),x1和x2被称为对应点。摄像机在这两个位置对应的投影矩阵为M1和M2,投影中心为O1和O2,这两个点同时也是相应位置摄像机坐标系(即人为定义的摄像机所在坐标系)原点。

图2 BSV的计算模型
x1与x2在的齐次坐标(u1,v1,1)T和(u2,v2,1)T与点X的齐次坐标(x,y,z,1)T的关系为:
(2)
(3)
式(2)和式(3)分别为直线O1x1和O2x2的解析表达式,其交点为X,其坐标可通过联立式 (2)和式(3)求解方程组得出s1和s2为尺度因子,可作为中间变量被消去。这就是运动式单摄像机BSV的基本原理。
投影矩阵M1可经矩阵的上三角分解[10],分解成摄像机内参矩阵K,旋转矩阵R1和平移向量t1,即M1=K[R1,t1]的形式,M2亦同理。令O1位置的摄像机坐标系重合点X所在的世界坐标系,则M1=K[I,0],其中I为单位矩阵。设位置2到位置1的旋转和平移(相对位置关系)分别为R和t,则有M2=K[R,t]。R和t即为运动式单摄像机BSV系统的运动参数,求解该参数的过程称为摄像机运动估计。
2 关键技术
2.1 系统参数求解
根据分析,系统参数主要包括摄像机的内参数矩阵K,运动参数R和t,关于内参矩阵,其求解方法已相当成熟,采用经典的张氏标定法以一个平面黑白棋盘格标定板进行[11]求解。以下重点分析运动参数R和t的求解问题[12]。
对于图2中摄像机像平面上的两点x1和x2,存在如下关系:
(4)
式中:F为基本矩阵。F具有如下性质:
F=K-T[t]×RK-1
(5)
其中:
(6)
令:
E=[t]×R
(7)
式中:E为本质矩阵。
令:
(8)
则有:
(9)
本质矩阵求解方法很成熟,具体可参考文献[13]及文献[14]。待求解出本质矩阵之后,可采用奇异值分解 (singular value decomposition,SVD)[10]的方法从E中得出[t]×和R。 此外,该方法求解出的向量t只有方向,没有模长,为确定平移向量的模长,可通过测量场景中存在的一些具有固定尺寸的信息进行反向求解,如边长已知的矩形等,具体可参考文献[15]。
2.2 边缘提取
边缘提取指裂缝图像边缘像素点提取,即如何在图像中准确识别裂缝边缘处的像素。
根据图像的灰度变化速率确定图像边缘,由此产生了著名的Canny边缘检测算法[16],其核心步骤为:图像平滑→计算梯度→非极大抑制→双阈值检测。Canny边缘检测算法的效果如图3,通过该方法,可将裂缝图像的边缘按像素坐标形式存储,便于后续应用于笔者BSV方法裂缝边缘点坐标测量。
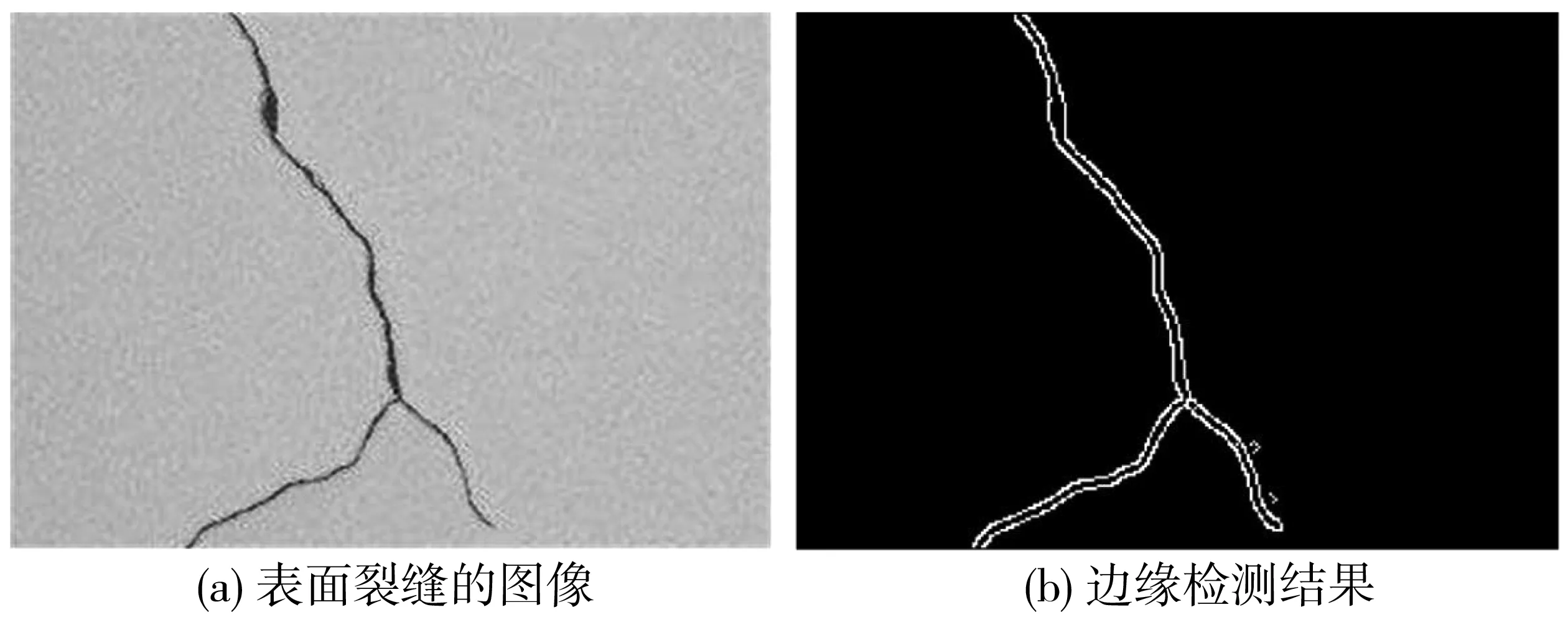
图3 典型的结构表面裂缝及其边缘检测结果
3 裂缝宽度测量实验
采用实验方法验证所提出测量方法的准确性。使用韩国Vieworks VH-5MG工业摄像机,分辨率为2 488 pixels×2 056 pixels,单个像素的尺寸大小为3.45 μm×3.45 μm。所用黑白棋盘格标定板阵列为12×9,单个小方格尺寸为30 mm×30 mm。首先分析使用运动式但摄像机BSV系统对裂缝测量的实现过程,然后通过实验验证该方法对裂缝测量的精度。
3.1 实验过程
使用摄像机分别从两个不同的位置采集裂缝图片,摄像机镜头离裂缝的距离约为0.5 m;此外,为确定平移向量的真实大小,在裂缝附近置放一阵列为4×4的黑白棋盘格,单个小方格尺寸为10 mm×10 mm,如图4。
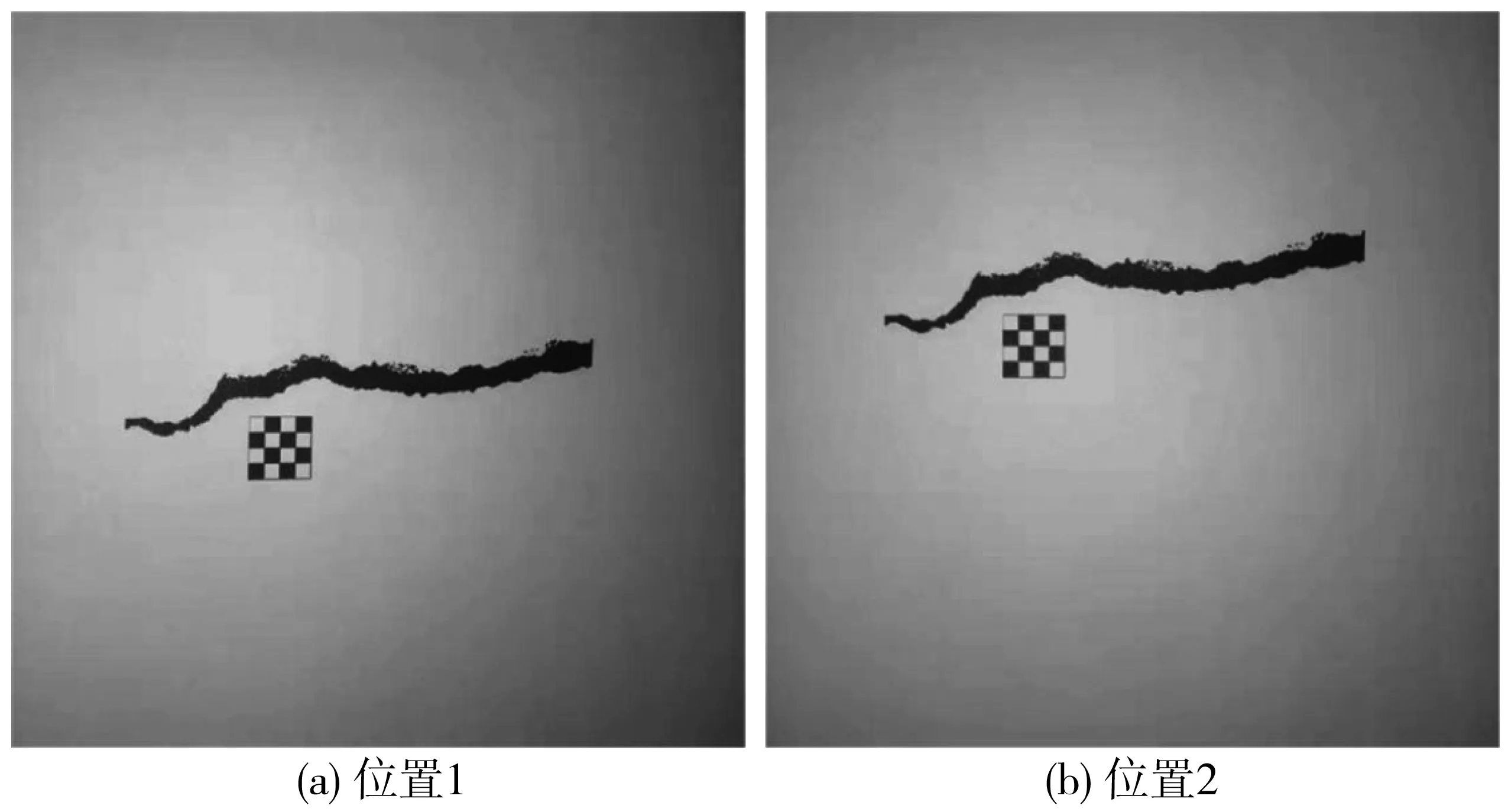
图4 两个不同位置采的集裂缝图像
为便于叙述,将图4(a)记为图像1,图4(b)记为图像2。为获取估计E所需的对应点,采用SIFT算法[17]将两幅图像进行匹配,结果如图5。
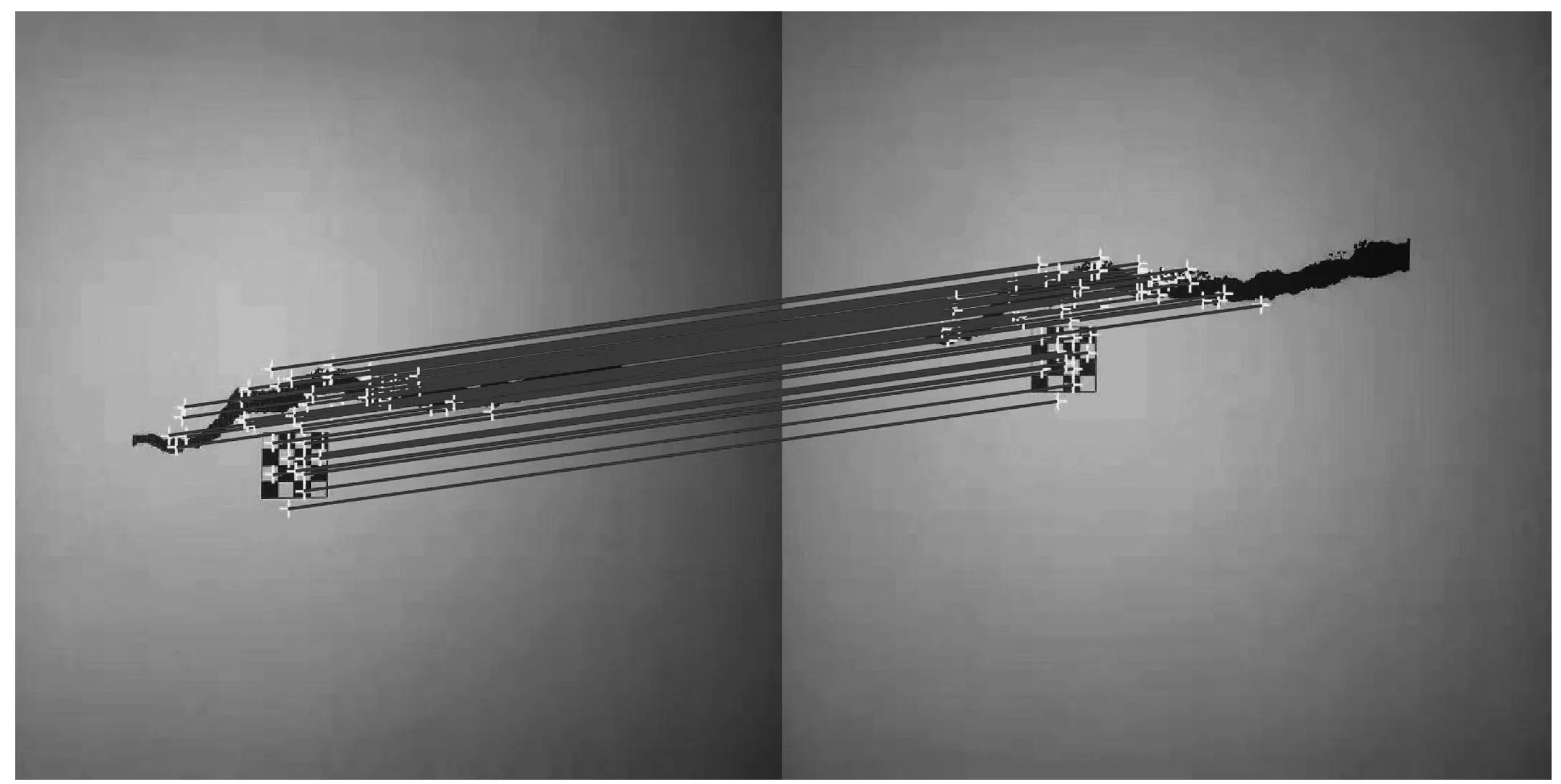
图5 图像1和图像2的对应点
将通过张氏方法标定所得的摄像机内参数矩阵结果记为K,那么,根据内参矩阵、特征匹配结果以及裂缝周边棋盘的固定尺寸,根据2.1节中的方法可计算摄像机从位置2到位置1的运动参数R和t。
对于x1和x2,有:
x1=x2H
(10)
式中:H为单应矩阵,计算公式如下[18]:
(11)
式中:n为摄像机位置2像平面在位置1摄像机坐标系下的单位法向量;d为位置1摄像机坐标系原点到位置2摄像机像平面的距离,nd=n/d。
对两幅图像分别进行边缘检测,结果如图6。
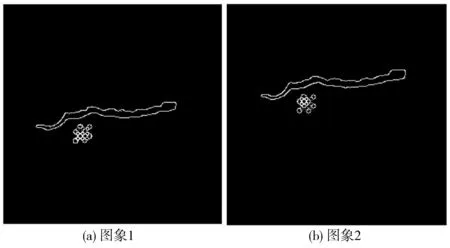
图6 两位置下裂缝图像的边缘检测结果
设点x2i=(u2i,v2i)为三维空间中裂缝边缘上的点Xi=(xi,yi,zi)在图像2裂缝边缘上的一点,那么x2i在图像1上的对应点x1i可由x2iH计算。
通过计算所得的R和t与真实的旋转及平移往往存在一定差异,因此x2iH与x1i一般情况下并不重合。可将图像1中距离点x2iH最近的边缘点作为x2i的对应点x1i,如图7。
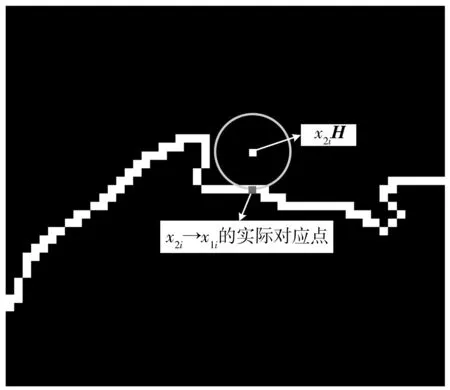
图7 点x2i在图像1中对应点坐标的计算
已知点x1i的像平面坐标及M1=K[I, 0]和点x2i的像平面坐标及M2=K[R,t],可根据1.3节的方法计算点Xi在世界坐标系下的空间(相对)三维坐标。
而后,可以采用以上方法计算裂缝两侧边缘所有点的三维坐标,继而可以按照1.1节所述方法计算裂缝的宽度。
3.2 实验结果
实验中摄像机的内参矩阵K,以及运动参数R和t的求解结果如式(12)~(14):

(12)

(13)
(14)
针对图4中的裂缝,将其已知最大宽度(7.032 mm,通过CK-10显微裂缝测宽仪测出)作为参考值。在不同测量距离的情况下,以3.1节中所述实验过程对裂缝宽度进行测量,其测量结果与相对测量偏差如表1。
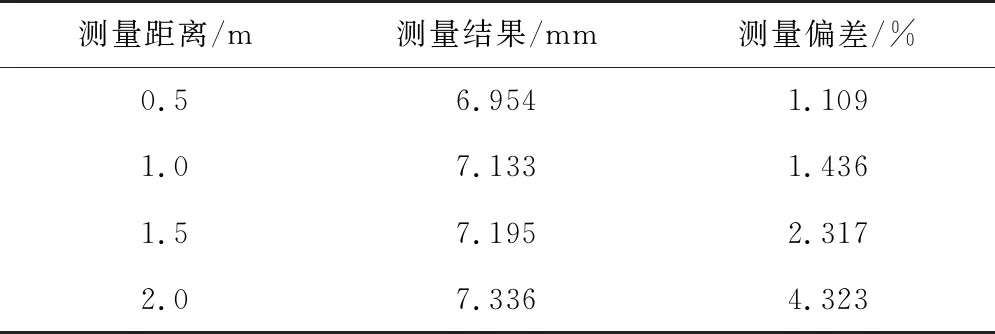
表1 不同距离下对裂缝宽度的测量值与相对偏差
由表1可见,在2 m以内的测量距离条件下,笔者提出的运动式单摄像机BSV系统对裂缝的测量偏差均在5%以内,这表明笔者所提出的测量方法具有良好的可靠性。同时,该方法无需接触测量,具有良好的便捷性。
4 结 语
1)提出了一种基于运动式单摄像机BSV的结构表面裂缝测量方法,只需要一个视觉传感器即可实现传统BSV的功能。
2)构建了一套完整的测量系统,实现了较大范围内裂缝的无接触式自动化测量,并取得了较为准确的测量精度。
3)笔者实验采用的是理想情况下的特例,即图像中仅存在裂缝特征,然而在实际应用中,所采集到的裂缝图像周围往往存在非常复杂的干扰特征,如何从干扰特征丰富的测量场景中实现结构表面裂缝区域的自动化、精准识别,是进一步的研究方向。
