化学抛光设备视觉检测系统设计
2022-10-08薛书亮
李 斌,林 晨,张 博,薛书亮
(中国电子科技集团公司第四十五研究所,北京100176)
碲锌镉(Cadmium Zinc Telluride,CZT)是一种宽禁带II-VI族化合物半导体材料,光电特性优异,是制备高性能HgCdTe红外探测器的优选外延衬底材料。随着红外探测器的不断发展,对于制造红外器件的最佳衬底材料——CZT晶片的尺寸及表面质量要求越来越高[1,2]。化学抛光工艺是有效去除机械损伤及表面隐形缺陷的关键工艺,决定了CZT晶片的最终表面质量。用于CZT衬底化学抛光工艺的化学抛光机属于CZT衬底制备的关节环节设备,为了提高工作效率,实现多规格晶片的自动上下料功能,设计一套兼容多规格晶片托盘识别功能的视觉检测系统在全自动化学抛光机设备中至关重要。
1 需求分析
CZT晶片化学抛光工艺需通过晶片托盘的自重施加向下的外力并同时进行旋转抛光来实现,工艺过程中需通过晶片托盘卡具配合,如图1所示。

图1 化学抛光卡具示意图
CZT晶片尺寸分为75 mm(3英寸),100 mm(4英寸),150 mm(6英寸)三种规格,相应的晶片托盘末端尺寸为φ88 mm、φ106 mm、φ160 mm;多种规格晶片卡具的顶端尺寸相同,便于视觉检测。卡具与晶片尺寸的对应关系如表1所示。
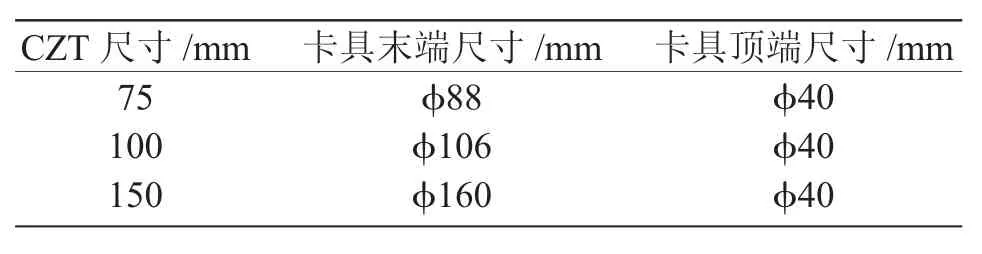
表1 CTZ晶片尺寸与卡具尺寸的对应关系
承载晶片托盘的抛光转台可实现3种规格晶片的抛光工艺,抛光台面工位布局如图2所示。

图2 抛光盘工位布局
在化学抛光前,需对未承载晶片托盘的工位进行视觉识别,确定工位规格及工位位置信息,用于机器人将托盘放置于工位;在化学抛光后,需对工位中承载的晶片托盘进行视觉识别,确定晶片托盘规格及位置信息,用于机器人将托盘从工位中取出。由此可分析,本视觉识别系统需具备如下功能:
(1)能够实现相机像素坐标系与抛光盘坐标系之间的校准;
(2)通过图像识别分析,获得卡具中心在抛光盘坐标系中的坐标值(X,Y)等数据信息;
(3)通过数据传递,将数据信息交互给主控单元,传递至机器人控制器。
2 系统构成
本系统主要由3部分组成,即:主控单元、视觉旋转单元及视觉检测系统单元,如图3所示。

图3 系统构成
2.1 主控单元
主控单元能够实现对视觉旋转单元的运动控制功能,控制方式采用EtherCAT总线方式,能够进行实时控制,对比传统脉冲控制方式,接线更加简洁,驱动器状态的获取更加灵活。
主控单元通过EtherCAT总线方式,能够实现对视觉控制检测单元的远程命令控制,并能实时采集视觉检测单元识别的信息数据。
2.2 视觉旋转及检测单元
视觉系统的相机及光源通过机械结构与步进电机精密连接,通过对步进电机旋转角度控制,实现在抛光盘上方各工位视觉识别视场的切换。相机及光源所处的旋转平面与抛光盘旋转的平面在设计与实际安装时保持平行,这是视觉系统采集图像,以及后续图像分析的硬件基础。
3 视觉旋转及识别单元设计
3.1 结构设计
在本系统中相机与光源保持同轴安装,通过高精度旋转控制,切换拍摄视场,满足多视场区域中多规格晶片托盘及工位的识别,如图4所示。
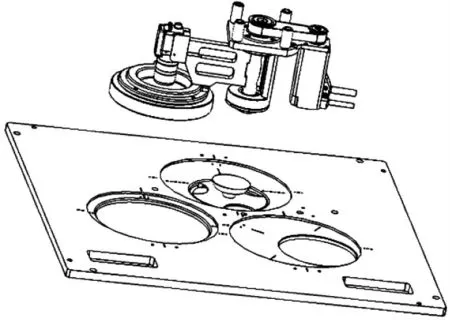
图4 视觉旋转及识别单元结构示意图
3.2 相机选择
在任意成像系统中,相机始终起着至关重要的作用。一个稳定性好、采图质量优良、参数合适的相机可以为后期图像处理打下良好的基础[3]。通常视觉系统相机选择流程如图5所示。
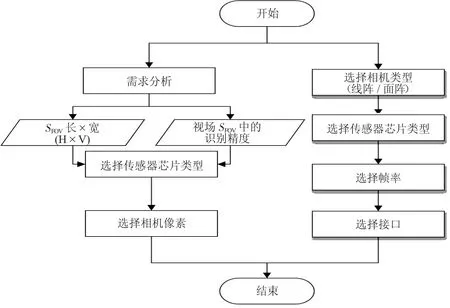
图5 视觉系统相机选择流程
(1)相机类型选择。相机可分为面阵相机与线阵相机。面阵相机适用于小幅面目标一次成像。通过对视场,识别目标等因素的分析,本系统需要进行小幅面一次成像,由此选择面阵相机。
(2)分辨率选择。工业相机的分辨率是相机最基本的参数之一,在同一平面内成像面积固定的情况下分辨率越高,图像中可用的细节越多,图像分辨能力越强。为了能够对拍摄后的图像进行后续处理,相机的分辨率一定要大于实际检测要求的分辨率。假定D为视场幅面最大尺寸,V为相机短边方向分辨率,C为检测精度,K为像素因子,则可估算:

假定用K=3个像素代表一个最小精度,估算短边方向分辨率约为1 200 pix。
(3)传感器类型选择。相机芯片主要有CCD和CMOS两类,由于CCD相比于CMOS有成像效果好,分辨率高、噪声低等优势,但价格相比CMOS稍高,本系统选择CCD相机。
(4)相机帧率。帧率是指相机采集传输图像的速度,本系统不要求单位时间内进行多次拍摄,不过本系统拍摄的是运动物体,要求单次拍摄图像的读取时间尽量小,假设图像读取时间t图像读取(ms),图像读取帧速率fps(帧/s),则帧率计算式为:

通过估算,选择30 fps相机帧率。
(5)接口类型选择。工业相机常见的接口有USB3.0、Camera Link和千兆以太网(GigE)等。这几种传输方式都适用于本系统,结合相机品牌等实际情况,选择Camera Link。
综合以上因素,选择1 600(H)×1 200(V)像素,30 fps,Camera Link接口,彩色CCD相机,芯片尺寸为45 mm。
3.3 镜头选择
镜头选型是视觉成像系统搭建过程中非常重要的一环,需要结合焦距(f)、工作距离(DW)、景深、视野(SFOV)、相机靶面尺寸(SS)等相关参数进行选择。镜头选型的流程如图6所示。
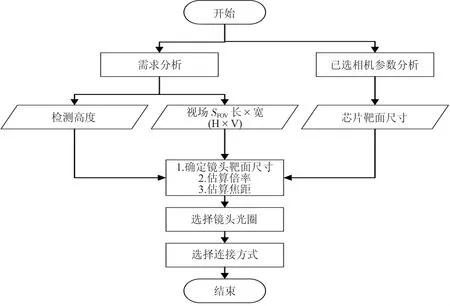
图6 视觉系统镜头选择流程
结合相机靶面尺寸(SS)与视野SFOV大小比例,倍率β可根据以下计算式估算:

由倍率β与工作距离DW,焦距f可根据如下公式估算:

通过如上计算,选择25 mm焦距的标准镜头。
3.4 光源选型
在机器视觉系统中,光源的作用是突出被测物中需要提取的特征,合适的光源是机器视觉系统成功的关键,它决定着能否顺利的对图像进行后续的处理。
光源选择主要依据光源材质、光源颜色、照射高度,照射面积,照射强度等参数。本系统属于明场照明,拍摄距离高,为突出抛光盘中工位的轮廓,减少环境光干扰,选择高角度环形光源,通过漫反射方式照亮被检测区域。环形光源示意如图7所示。

图7 环形光源示意图
4 视觉检测程序设计与实现
首先为视觉识别中一些特定名词作出如下定义:
(1)场景组:抛光盘上3个待识别的工位;
(2)场景:各工位待识别的3种规格晶片托盘;
(3)场景校准:各场景组的像素坐标系与抛光盘坐标系之间的坐标转换,采用多点校准方法,通过在视场中三个以上不在同一条直线上点的坐标,进行坐标系转换;
(4)场景检测程序:进行图像分析,获得工位有料、中心坐标、检测完成等数据;
(5)数据输出:通过EtherCAT进行数据结果输出。
本视觉识别程序主要包括如下3个流程:
视觉检测场景切换流程(包含检测场景确认流程及检测场景切换子流程);
视觉检测及数据输出流程;
视觉检测算法流程。
视觉识别场景确认流程如图8所示,视觉识别场景切换流程如图9所示。
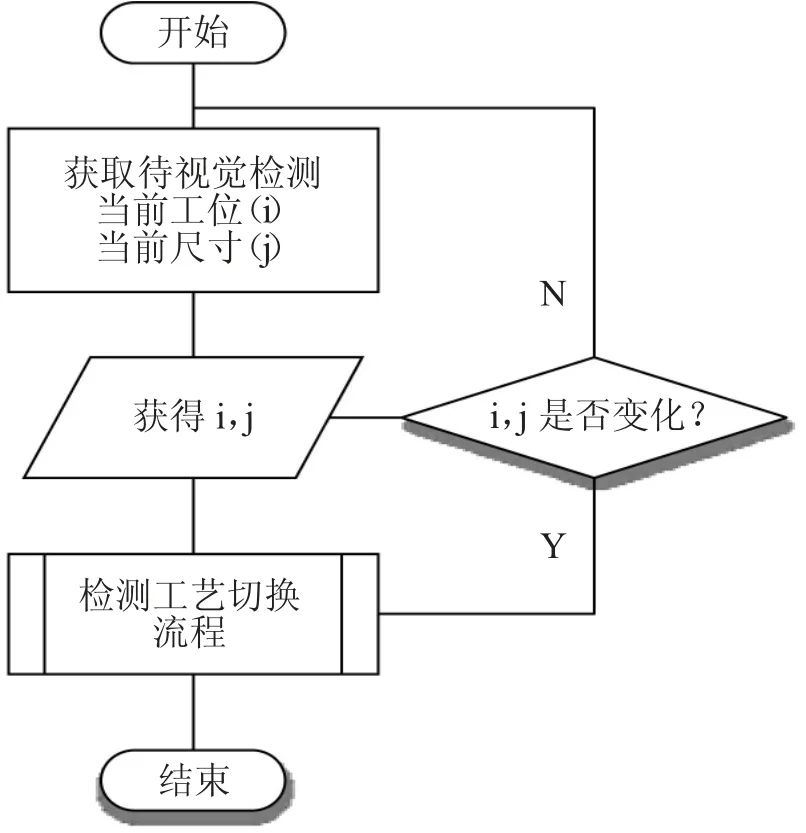
图8 视觉识别场景确认流程

图9 视觉识别场景切换流程
视觉识别及数据输出流程如图10所示。
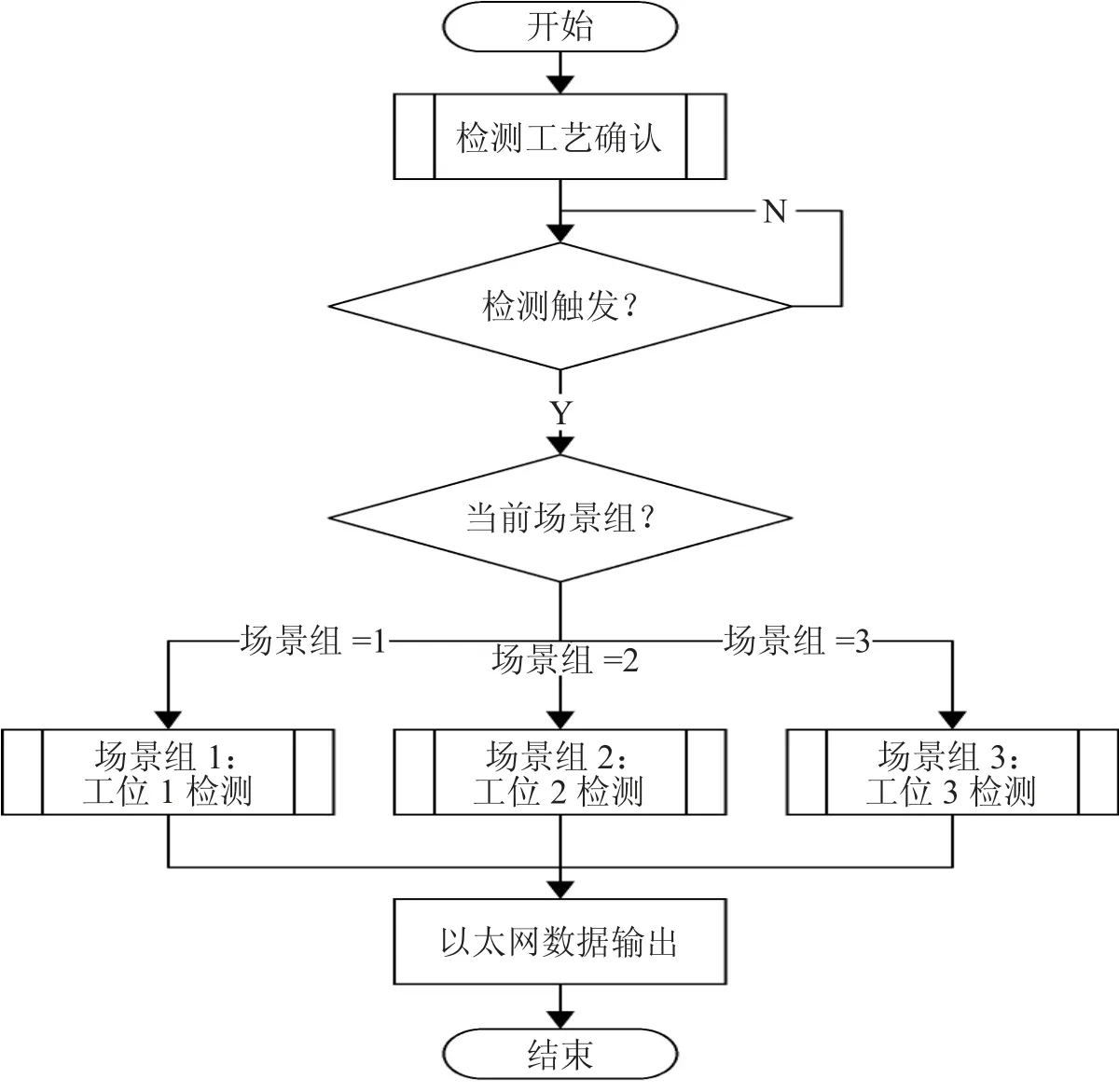
图10 视觉识别及数据输出流程

图11 视觉识别模块流程
视觉识别程序模块主要包含图像输入、颜色灰度过滤、测量前处理(背景消除、边缘提取)、校准值参照、形状搜索、结果显示、圆形扫描边缘位置、EC圆搜索、EtherCAT数据输出等子程序模块。检测程序流程如图11所示。
5 结束语
通过对化学抛光工艺原理及需求的分析,介绍了碲锌镉晶片化学抛光设备视觉识别系统的构成及各单元的主要功能,详细描述了视觉旋转及检测单元的程序设计及实现。经过验证,该系统能够实现各检测场景切换,并对场景中偏心旋转的晶片托盘进行识别,得到识别数据,并通过主控单元与视觉检测单元进行实时通讯,完成识别数据传递。
