论动能定理在单自由度系统静力学中的应用
2022-10-08张居敏李文成
张居敏,李文成
(华中农业大学工学院,湖北 武汉 430070)
动能定理作为动力学的一条重要定理,有关该定理在动力学中的具体应用已经有比较全面的论述[1-3]. 实际上动能定理也可以求解静力学问题,但这方面的报道鲜为人知. 笔者研究了该定理在单自由度系统静力学问题求解中的具体应用,研究结果有助于消除古典力学和现代分析力学之间的两张皮感觉[4].
静力学主要研究物体静止平衡的力学条件,可以把此类静止平衡问题看作:系统从静止开始运动时,初始加速度刚好为零的动力学问题. 本文所谓的静止是系统相对于某个惯性坐标系而言,所谓的物体系统是指刚体系统而言. 系统从静止开始运动,如果初始加速度零,则系统将会因为“动不起来”而继续保持静止状态. 运动状态不变,说明受力平衡. 在动力学中有关求解系统从静止开始运动时的初始加速度问题比较常见,属于常规性动力学题目.
例1 图1a中轮1、杆2都是匀质物体,质量分别为m1,m2. 轮1半径为r,可沿水平面自由纯滚动,不计滚阻力偶. 杆2 长度为L,一端铰接于轮心,另一端靠在光滑墙壁上. 系统在竖直平面内,轮1 受到矩为M的力偶作用,1)求系统从θ=30°位置由静止开始运动时杆2的初始加速度;2)如果系统在θ=30°位置静止且受力平衡,求力偶M的大小.
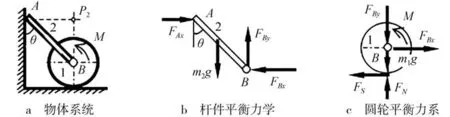
图1 动力学与静力学之间的内在联系
分析 先对系统列动能定理方程,动能表达式包含速度项,动能定理方程对时间求导数即得加速度.
解 1)设轮1顺时针纯滚动、杆2逆时针转动. 以θ角为系统参数,杆2瞬心在P2点处,νB=Lcosθ·ω2,vB方向:水平向右,系统动能

例1 第2)问明显属于静力学问题范畴,但用动力学理论求解出了该静力学问题. 为验证求解结果即式(2)的正确性,再用静力学理论重新求解例1第2)问所示问题.
系统静止且受力平衡,杆2及轮1各自的平衡力系分别如图1b和c所示.
对AB杆平衡力系(如图1b所示)

对圆轮平衡力系(如图1c所示)

式(2)和(3)中变量M的值相同,说明例1 第2)问所示静力学问题用动力学理论求出的结果是正确的. 由于动能定理只涉及做功的力,而其他所有不做功的力,即理想约束力全部被过滤掉了,所以用动能定理导数形式方程求解静力学问题相对比较简单:涉及到的未知数最少. 但是对系统整体只能列一个动能定理方程式,所以对静止系统用初始加速度等于零的方式来求解静力学问题时,只能求解一个未知数,或者此方法对单自由度系统最有效.
1 用动能定理确定单自由度物体系统的静止平衡条件


对于静止状态的单自由度物体系统,设系统参数为q,q具有角度或长度单位. 设系统从初始qo位置由静止开始运动,求初始加速度.
利用动能定理导数形式方程求加速度. 系统从静止开始运动,初始动能为零,运动过程中系统的动能可记作T=f(q)·q̇2,其中函数f(q)是由系统结构决定的系统参数q的一元函数,q̇是系统参数q对时间的导数,表示速度,可能是角速度,也可能是线速度. 运动过程中系统所受力系做的功可记作W=w(q),功函数w(q)由系统结构及所受力系等共同决定. 力对物体做的功可能还与物体运动轨迹有关,但是单自由度系统中各物体的运动轨迹完全由系统参数q的起始、终止值决定,轨迹是既定的、唯一的. 因此,单自由度物体系统运动过程中力系做的功可以表示为系统参数q的一元函数. 对系统列动能定理方程得w(q)=f(q)·q̇2,该方程两边同时对时间参数t求导数得

式(4)求导过程说明:功函数w(q)对时间求导数时按数学上复合函数求导法则进行:先对系统参数q求导数,然后q再对时间求导数;动能表达式T=f(q)·q̇2中q和q̇可能都随时间参数t的变化而变化,所以动能对时间求导数时按数学上两函数乘积求导法则进行,即:乘积的导数等于第一项的导数乘以第二项,再加上第一项乘以第二项的导数,其中第一项f(q)对时间求导数时按复合函数求导法则进行:先对系统参数q求导数,q再对时间的导数.
系统从静止状态开始运动,如果初始加速度为零,则系统将永远保持静止状态. 运动状态不变,说明受力平衡. 于是由式(6)得出以下结论:
定理1 对于静止状态的单自由度物体系统,其处于受力平衡状态的充要条件是:假设系统从静止开始运动,运动过程中系统所受力系做的功是系统参数的函数(称为功函数),则初始静止位置必为功函数的驻点位置,或者说功函数对系统参数的一阶导数在初始静止位置必为零.
功函数驻点位置就是系统静止时的受力平衡位置. 因为根据动能定理,功的导数等于动能的导数,所以功函数的驻点位置也是系统动能的驻点位置,即动能为常量的位置,也就是动能守恒位置,系统在该处静止则动能为零,而且动能守恒即动能不变,会一直为零,所以系统将永远保持静止状态,运动状态不变,说明受力平衡. 定理1 也可理解为动能为零(即静止)的动能守恒系统一定受力平衡,或者说动能守恒系统静止时一定受力平衡.
质点作曲线运动时加速度可分解为2项:切向加速度和法向向心加速度,前者反映速度大小的变化情况,后者反映速度方向的变化情况[1-2]. 式(6)是通过动能定理导数形式方程求解出的系统加速度,所以只含切向加速度因素而不含法向向心加速度因素. 定理1 强调系统静止,因为静止时质点法向向心加速为零,此时如果切向加速度也为零,则全加速度必为零,即受力平衡. 定理1 亦可通俗理解为切向加速度为零的静止系统一定受力平衡.
2 功函数驻点位置确定方法
2.1写出功函数表达式,并令一阶导数等于零
例2 如图2所示,当OC杆绕轴O摆动时滑块A沿杆滑动,带动AB杆在竖直导槽内移动,不计各构件自重与各处摩擦.φ=30°,机构静止平衡,求力F1,F2之间的关系.
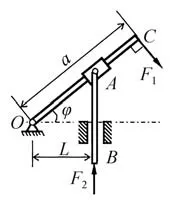
图2 平衡力系
功是力与物体受力点微位移点乘积的积分. 功是由积分得到,积分具有累加性,所以功也有累加性.因此,系统运动初始位置不同时,功函数表达式相差一个常数,该常数等于系统从一个初始位置运动至另一个初始位置过程中力系对系统做的功. 于是结合定理1有:
推论1 单自由度物体系统运动过程中力系对系统做的功是系统参数的一元函数,该函数(即功函数)的驻点位置与系统运动初始位置无关,系统在功函数驻点位置静止时所受力系一定是平衡力系.如对例题2,也可假设系统从φ=0即OC杆水平位置开始运动,则功函数

令w'(30°)=0求解即可.
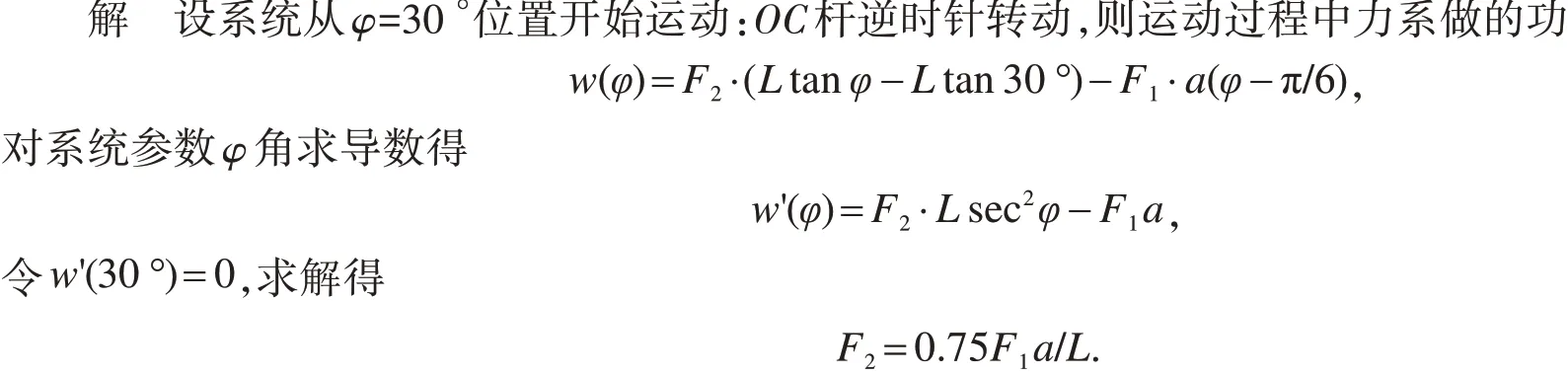
例3 图3a 结构中各杆自重都不计,AC=CE=CD=CB=DG=GE=L.G铰处作用有竖直力F,系统静止平衡,求支座B的水平约束力.
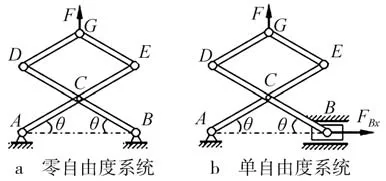
图3 零自由度系统转化为单自由度系统
解 该系统自由度为零,把B铰的水平约束用其约束力FBx替代,得到图3b 所示单自由度系统,该系统静止平衡. 假设系统从θ=0位置开始运动,在运动至图3b所示位置过程中力系做的功

对系统参数θ角求导数得

令w'(θ)=0,求解得

例3说明,零自由度系统可以通过解除约束,即用约束力替代约束的方式改造为单自由度系统.
2.2根据导数的数学定义确定函数驻点求功函数的导数时也可以根据导数的数学定义,先写出系统参数q发生无限小改变量Δq过程中力系做的功Δw,再除以Δq即得功函数的导数.
设某单自由度系统包含n个主动力(n为自然数,n≥1),其中第i个主动力F i作用点对应的位置矢量为ri,系统参数q发生无限小改变量Δq时引起位置矢量ri的该变量为Δri,则系统功函数的导数为

由高等数学相关理论知道[5],设矢量a,b之间夹角为θ,则点乘积为

即2个矢量的点乘积等于两者模的乘积再乘以其之间夹角的余弦,也等于2个矢量x轴分量乘积、y轴分量乘积、z轴分量乘积三者的和. 因此,式(7)可按以下2种形式继续展开,即式(8)和式(9).

式(8)中θi为力矢量Fi与位移矢量Δri之间的夹角;式(9)中Fix,Fiy,Fiz分别表示力矢量Fi在坐标系中x,y,z轴上的投影分量,即Fi=Fixi+Fiy j+Fizk;Δxi,Δyi,Δzi分别表示位移矢量Δri在坐标系中x,y,z轴上的投影分量,即Δri=Δxii+Δyi j+Δzik.
式(8)对应的计算方法称为矢量分析法,式(9)对应的计算方法称为坐标解析法.
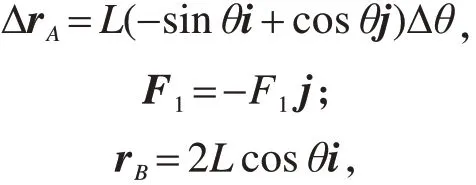
例4 如图4a 所示,细杆OA,AB长度都为L,OA杆上作用有矩为M的逆时针力偶,A铰受到竖直力F1作用,滑块B受到水平力F2作用. 不计各构件自重,系统在图示θ=30°位置静止平衡,已知力F1,F2,求力偶M的大小.
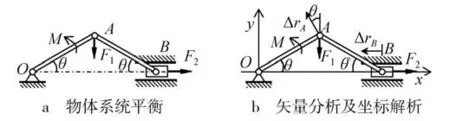
图4 物体系统平衡问题的解法
解法1(矢量分析法) 以θ角为系统参数,在其发生无限小改变量Δθ过程中(设OA杆逆时针转动,Δθ>0),如图4b所示,由式(8)得功函数导数为

其中,无限小位移ΔrA⊥OA,其大小为ΔrA=L·Δθ;xB=2Lcosθ(求微分)⇒ΔxB=-2Lsinθ·Δθ,所以无限小位移ΔrB(←)的大小(即:该矢量的模)为ΔrB=2Lsinθ·Δθ,注意,矢量的模都是正数;M矢与Δθ矢方向都垂直纸面向上. 则由式(10)得

依题意知θ=30°时w'(θ)=0,即

解法2(坐标解析法) 如图4b所示,在固定坐标系Oxyz(z轴垂直纸面向上、未画出)中,

微分得
微分得
由式(9)得功函数导数为


依题意知θ=30°时w'(θ)=0,即

解法3(功函数求导法) 如图4a所示,设系统从θ=0位置开始运动,在运动至图示位置过程中力系做的功

对θ角求导数得

依题意知θ=30°时w'(θ)=0,即

设系统参数q发生无限小变化量Δq过程中力系对系统做的功为Δw,则由高等数学中函数微分理论可知[5],Δw=w′(q)·Δq,在功函数w(q)驻点位置Δw=w′(q)·Δq=0,于是有以下结论:
推论2 静止状态单自由度系统处于受力平衡状态的条件:系统参数发生无限小改变量过程中,力系对系统做的功等于零,或者说系统功函数的微分等于零.
功具有累加性,系统在功函数驻点处的无限小区域内运动时,其所受力系不做功(或做功和为零),所以动能不变. 此时动能一旦为零(或者无限趋近于零),系统将因为动能守恒而永远保持静止状态,运动状态不变,说明受力平衡. 用动能定理求解静力学问题的本质:动能为零的动能守恒系统将永远保持静止状态. 动能是否守恒由系统所受力系决定:系统运动过程中力系对系统不做功则动能守恒、做功则动能不守恒. 系统动能是否守恒与动能是否为零(或无限趋近于零)没有关系. 用动能定理求解静力学问题时,都要让系统在静止位置处轻微(无限小)动一下,看动的过程中是否动能守恒(即力系对系统是否做功). 如果动能不守恒,则其动能必将改变而不可能永远为零.
2.3 运动学理论在求解功函数导数时的应用设系统参数q发生无限小变化量Δq过程中力系对系统做的功为Δw,此无限小的功Δw等于力与力作用点无限小位移的点乘积. 根据功的定义,不论物体是否从静止开始运动或者以多大的速度运动,只要位移相同,力对物体做的功就相同,只是功率不同而已. 因此,Δw等于力与无限小位移的点乘积,而与物体以多大的速度通过这段无限小位移没有关系.
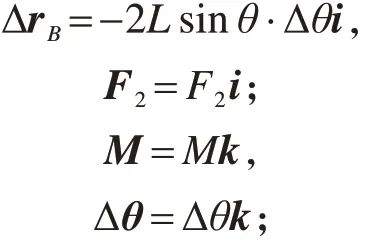
例5 如图5a所示,OA杆水平,长度为r,受到矩为M的力偶作用,并通过杆件及滑块与水平力F相平衡. 已知θ角大小,系统静止平衡,不计各杆自重,求M与F之间的平衡关系.
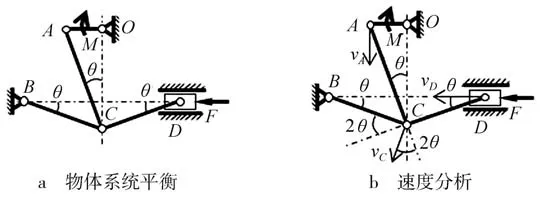
图5 速度分析法在静力学问题求解中的应用
解 设OA杆逆时针匀速转动,角速度为ωOA,图示时刻各构件速度方向如图5b所示,在无限小时间段dt内力系做的功

AC杆、CD杆作平面运动,OA杆、BC杆定轴转动,νA,νC在AC杆轴线上投影相等:νAcosθ=νCcos 2θ;νC,νD在CD杆轴线上投影相等νCcos(90°-2θ)=νDcosθ. 于是有vD=vAtan 2θ=rωOAtan 2θ,带入式(11)并令Δw=0得0=-M·ωOAdt+F·rωOAtan 2θ·dt,约掉ωOAdt得

评论1 对于例题5所示静力学系统(如图5a所示),很难写出该系统的功函数表达式,直接对功函数求导数有些困难. 但是借助于运动学中的速度理论,写出了功函数在图示位置处对系统参数(即OA杆转角)的一阶导数.
评论2 对于例题5,当OA杆以恒定角速度ωOA匀速转过无限小角度Δφ过程中(Δφ=ωOAdt),滑块D的速度vD(如图5b所示)肯定不是匀速,必定有加速度. 力F作用点对应无限小位移的大小应该是
该式说明,当系统参数匀速变化时各力作用点的速度可能都不是匀速的、都有加速度,但因为时间段dt是无穷小量,所以完全可以忽略加速度因素,而认为各力作用点的速度也都是匀速,此处理方式对求解功函数的导数不产生任何影响.
例6 图6a所示机构中,匀质连杆AB重量为mg,长度为L,滑块A,B重量不计. 整个机构在竖直平面内φ=30°位置静止平衡,求力FA,FB之间的关系.
图6 静力学问题的4种解法
解法1(功函数求导法) 以φ角为系统参数,如图6a 所示,设系统从φ=0 位置开始运动,在运动至图示位置过程中力系做的功
解法2(速度分析法) 设力FA,FB作用点的速度方向如图6b所示.AB杆速度瞬心在P点,为便于计算功的无限小量,把AB杆重力作用点由中点C沿作用线滑至直线PA上D点处(力沿作用线在刚体上滑动不改变作用效果). 在AB杆上焊接一个质量为零的轻质薄板,使D点在轻质薄板上,这样AB杆重力mg滑至D点时就不会失去着力点. 在无限小时间段dt内,力系对系统做的功


在坐标系Oxy中,xB=Lcosφ,微分得ΔxB=-Lsinφ·Δφ,于是得无限小矢量ΔrB的模为ΔrB=Lsinφ·Δφ;yA=Lsinφ,微分得ΔyA=Lcosφ·Δφ,得无限小矢量ΔrA的模为ΔrA=Lcosφ·Δφ. 于是由式(13)得

3 讨 论
静止和受力平衡是2个不同又相互独立的概念. 对物体而言,静止说明速度为零,受力平衡说明加速度为零. 竖直上抛物体在最高点处速度为零、加速度不为零,即静止但受力不平衡;匀速直线运动物体不静止,但受力平衡.
系统在功函数驻点位置静止时一定受力平衡,但是在功函数非驻点位置静止时所受力系一定不是平衡力系. 因为从式(6)可以看出,系统在功函数非驻点位置(即w'(q)≠0 位置)从静止开始运动时初始加速度不为零,加速度不为零受力肯定不平衡. 因此,系统在功函数非驻点位置静止时所受力系一定不是平衡力系. 或者说系统只能在功函数驻点位置永远保持静止状态,而在其他任何非驻点位置静止时都会因为受力不平衡而“马上离开”. 也可以理解为:静止但动能不守恒的系统受力一定不平衡.
系统在功函数驻点位置不静止时其所受力系不一定是平衡力系,或者不静止但动能守恒的系统,其所受力系不一定是平衡力系. 因为由式(5)可以看出,系统不静止即q̇≠0 时候,而功函数的导数为零即w'(q)=0,但如果f'(q)≠0则系统加速度也不为零即q̈≠0,加速度不为零肯定受力不平衡. 例如,非匀质圆轮平躺在光滑水平面上(圆轮轴线垂直于水平面),并沿平面内的固定道作纯滚动时候,圆轮所受力系(重力、支持力、静摩擦力等)不做功,圆轮动能守恒即w'(q)=0,但其速度瞬心与质心之间距离不是常数,其对速度瞬心轴的转动惯量JP不是常数,导致式(5)中f'(q)≠0,所以圆轮运动过程中角加速度不为零,圆轮受力不平衡. 因此,圆轮不静止,动能守恒,但受力不平衡.
从式(5)可知,当w'(q)=0,f'(q)=0,q̇≠0 时候,系统加速度q̈=0,但此时系统受力也不一定是平衡力系. 因为有以下2种情况满足w'(q)=0,f'(q)=0,q̇≠0条件:
1)匀速定轴转动物体. 此时如果物体质心不在转轴上,则质心有不为零的向心加速度,质心加速度不为零,说明物体所受力系的主矢不为零,该力系肯定不是平衡力系;但如果物体质心在转轴上,则其所受力系就是平衡力系.
2)匀速直线运动物体. 此时物体所受力系一定是平衡力系.
因此,系统在功函数驻点位置不静止时其所受力系可能是平衡力系,也可能不是平衡力系.
4 结束语
提出了功函数概念,指出系统在功函数非驻点位置静止时其所受力系一定不是平衡力系;系统在功函数驻点位置不静止时其所受力系不一定是平衡力系;但如果系统在功函数驻点位置静止,则其所受力系一定是平衡力系. 或者说动能守恒系统不一定受力平衡,但静止时一定受力平衡. 静止、动能守恒是系统受力平衡的2 个充分条件,二者缺一不可. 用动能定理求解静力学问题时有4 种常用方法:功函数求导法、速度分析法、矢量分析法和坐标解析法,其中后3 种方法与虚位移原理有异曲同工之处. 从高等数学视角来看,虚位移原理方程就是某个函数的微分等于零方程,而此函数就是功函数,即功函数的微分等于零方程就是虚位移原理方程.
为强调静止,可以考虑在具体解题时把系统参数(例如q)的无限小改变量Δq和由此引起的功函数无限小改变量Δw,分别记作δq和δw形式. 因为系统静止平衡,没有发生任何运动,所以Δq和Δw都是假想、想象出来,并不是真实发生的量. 于是用符号δq和δw表示假想发生的量,用符号Δq和Δw表示真实发生的量,能更好地兼容虚位移原理理论. 但在讲课时不建议对学生一开始就用符号δq和δw,因为符号Δq和Δw与学生刚学过的高等数学中函数求导、微分等理论融合性更强,更容易接受.
有教材[1]在叙述虚位移原理时没有提及系统静止这一条件,而只是在原理证明过程中提到静止条件,这种做法有待商榷.
零自由度静力学系统可以用约束力替代约束的方式去掉一个约束而改造为单自由度系统,从而用动能定理理论求解. 多自由度系统静止平衡时,添加零约束(即约束力为零的约束)把系统改造为单自由度系统是下一步的工作的重点.
