在轨替换单元杆锥式三维碰撞动力学行为
2022-10-08游斌弟于香杰刘朝旭刘育强刘小猛
游斌弟 曹 芊 于香杰 刘朝旭 刘育强 刘小猛 赵 阳
1.哈尔滨工业大学(威海)海洋工程学院,威海,264209 2.北京空间飞行器总体设计部,北京,100094 3.哈尔滨工业大学航天学院,哈尔滨,150001
0 引言
在轨可替换模块(on-orbit replacement unit, ORU)是一类够能在航天器设备失效或达到使用寿命时通过机器人或舱外活动实现航天器部件更新的模块化部件[1]。ORU入轨后可在空间机器人系统操作下通过ORU上球头杆式导向系统与目标航天器的锥形孔进行粗定位[2-3]。球头导向杆到达一定位置后将与目标航天器锥孔发生接触碰撞进而产生速度突变,使得二者承受一定的冲击载荷;与二者之间的粗定位过程相比,航天器上的各柔性部件的变形对目标航天器与ORU的动力学影响相对较小,其弹性变形所产生的振动远小于粗定位过程中的冲击载荷[4-5]。
国内外学者针对ORU的结构与在轨装配等若干问题都进行了一定的研究。在“轨道快车”计划中所替换的ORU为立方体形状,底面设计有2个锥形导向槽、2个机械接口、1个电气接口和1个机械臂适配器,服务航天器ASTRO的附带机械臂在对该ORU进行抓持后将其以内嵌的形式安装到目标航天器NextSat中[6]。德国iBOSS(intelligent building-blocks for on-orbit satellite servicing, iBOSS)项目所设计的iBOSS-3型ORU基本模块元件为立方体形状,其边长为40 cm和80 cm两种规格,可满足大多数航天器仪器的安装要求[7]。张艳丽等[8]对下一代在轨更换模块的更换方式、设计准则进行了研究,对ORU的工作原理、结构进行了设计与分析,并阐明了在轨更换模块未来的发展方向。籍勇翔[9]预研了一种内嵌式面向在轨服务的ORU,该模块采用内嵌的形式安装在目标航天器中,其连接面的设计使用了丝杠螺母进行锁紧配合,并使用WS16-9航空插头作为数据交换总线。LI等[10]对在轨服务航天器中的模块化技术进行了概括总结,并阐述了未来在轨模块化航天器在在轨服务任务中的发展方向。上述文献表明,目前国内还没有进行模块化可更换航天器的在轨验证,且国内外对有关ORU的研究工作大多局限于关键结构方面。
目前针对空间微重力状态下的接触碰撞问题研究较多,BOTTA等[11]在研究捕获空间碎片的系链网的接触动力学问题时提出了一种用于对链网进行建模的集总参数方法以及选用不同的接触动力学模型进行数值模拟以了解链网在空间中的部署和捕获动态行为。KHABIBULLIN等[12]通过连续力学方法,以直径不大于0.2 mm的铝和钢球形颗粒与稠密石英之间的高速冲击现象(约10 km/s)研究了空间碎片对航天器窗口的冲击作用。BONDOKY等[13]用Hunt-Crossley碰撞力模型方法完成了基于锥杆式对接机构的对接动力学建模,同时研究了关于类锥-杆式对接机构的两个大型航天器的碰撞检测。张大伟等[14]研究了小型航天器上使用的类杆椎式对接机构的参数设计及其动力学分析方法,采用虚功率原理和Hertz模型建立了对接机构的整体接触碰撞动力学模型,并通过对不同初始条件下捕获阶段动力学仿真完成了缓冲阻尼参数的设计。张晓天等[15]对类iBOSS结构的模块化微小型卫星对接机构进行了机构原理分析、运动学方程的推导以及验证运动仿真分析等,其理论分析主要集中于ORU与目标航天器粗定位后的对接阶段,而在对接前的定位导向过程的接触动力学问题未有涉及。由此可见,目前在航天领域的接触碰撞动力学建模的研究工作主要集中于两个航天器之间的对接动力学研究,分别为空间碎片的高速冲击和小型航天器间的接触碰撞,然而针对定位过程的ORU与目标航天器之间的接触碰撞动力学特性分析甚少提及。而国际上在对接定位过程中失败的现象仍时有发生,如俄罗斯进步号飞船于2021年8月两次同国际空间站的对接失败,甚至影响到了整个空间站的姿态稳定[16]。ORU属于小型航天器结构,在其安装过程中,目标航天器的定位锥引导ORU的导向杆进行粗定位,发生接触碰撞,呈现复杂的动态特征,导向杆在锥内的弹性变形与一定角度运动产生的耦合作用对整个定位导向系统的影响不能忽视。
综上所述,本文针对在轨服务任务中ORU与目标航天器定位导向过程中的接触碰撞问题,建立了适用于空间在轨航天器定位、导向过程的三维碰撞动力学模型(NE-CR-LN(Newton-Euler cone-rod Lankarani-Nikravesh)三维接触动力学模型),推导改进了三维空间中的锥-杆间碰撞检测方程。在接触力学模型中综合考虑了刚度和阻尼的影响,通过将模型仿真结果同LS-DYNA仿真结果及其他文献模型进行对比分析,验证了NE-CR-LN动力学模型的正确性,并给出了导向仿真过程中两航天器的动态仿真分析结果。
1 NE-CR-LN三维接触动力学模型
1.1 动力学模型
定位导向过程中,首先由导向杆顶端球头与目标航天器的锥孔锥面接触,在进行一系列的接触碰撞之后,待ORU的定位导向杆进入锥孔圆柱孔位即认为ORU导向完成,再进行后续的机械连接动作。本团队研发了附有导向装置的ORU型号,图1所示为定位导向杆完全伸出ORU的状态。
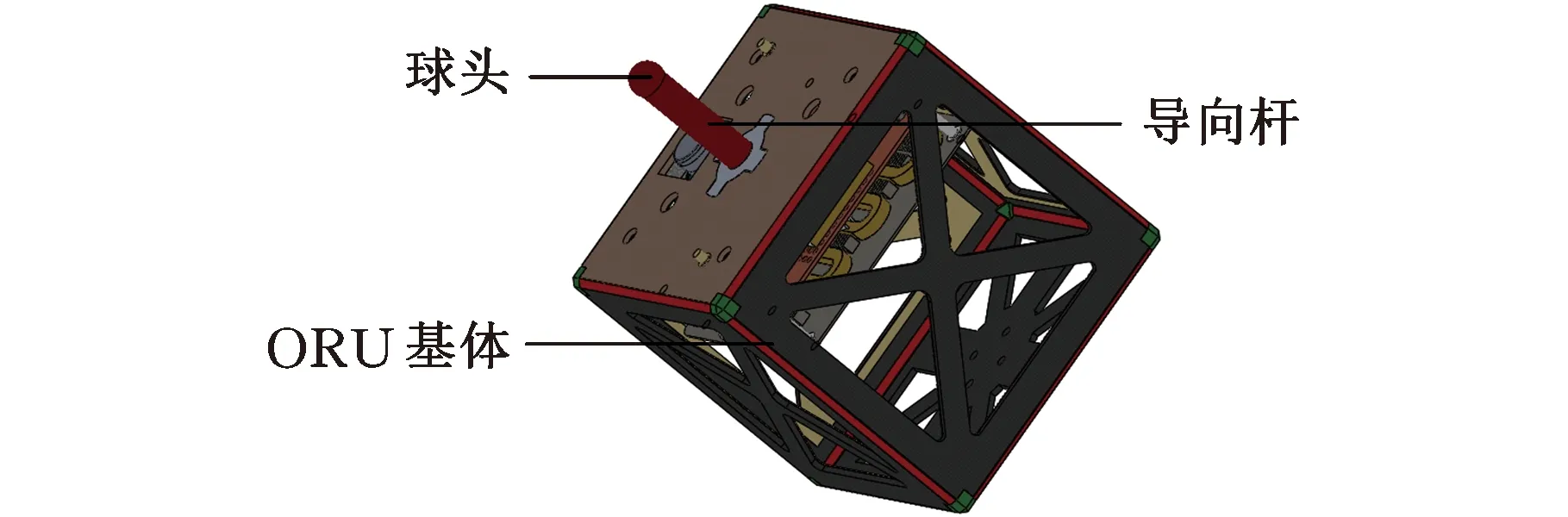
图1 所研发的附有简易导向装置的ORU型号Fig.1 The developed ORU model with simple guiding device
针对ORU至目标航天器的定位导向过程,作出如下假设:①忽略空间重力因素的影响;②ORU与目标航天器均视作刚体;③导向杆与ORU之间的连接视作刚性连接;④假设二者彼此接近时处于同一轨道,即忽略轨道动力学的影响。在ORU与目标航天器的定位导向过程中设定5种不同坐标系以简化所研究的接触碰撞问题,其中各坐标轴的指向均以图2为准。该建模过程是在三维空间中完成的。
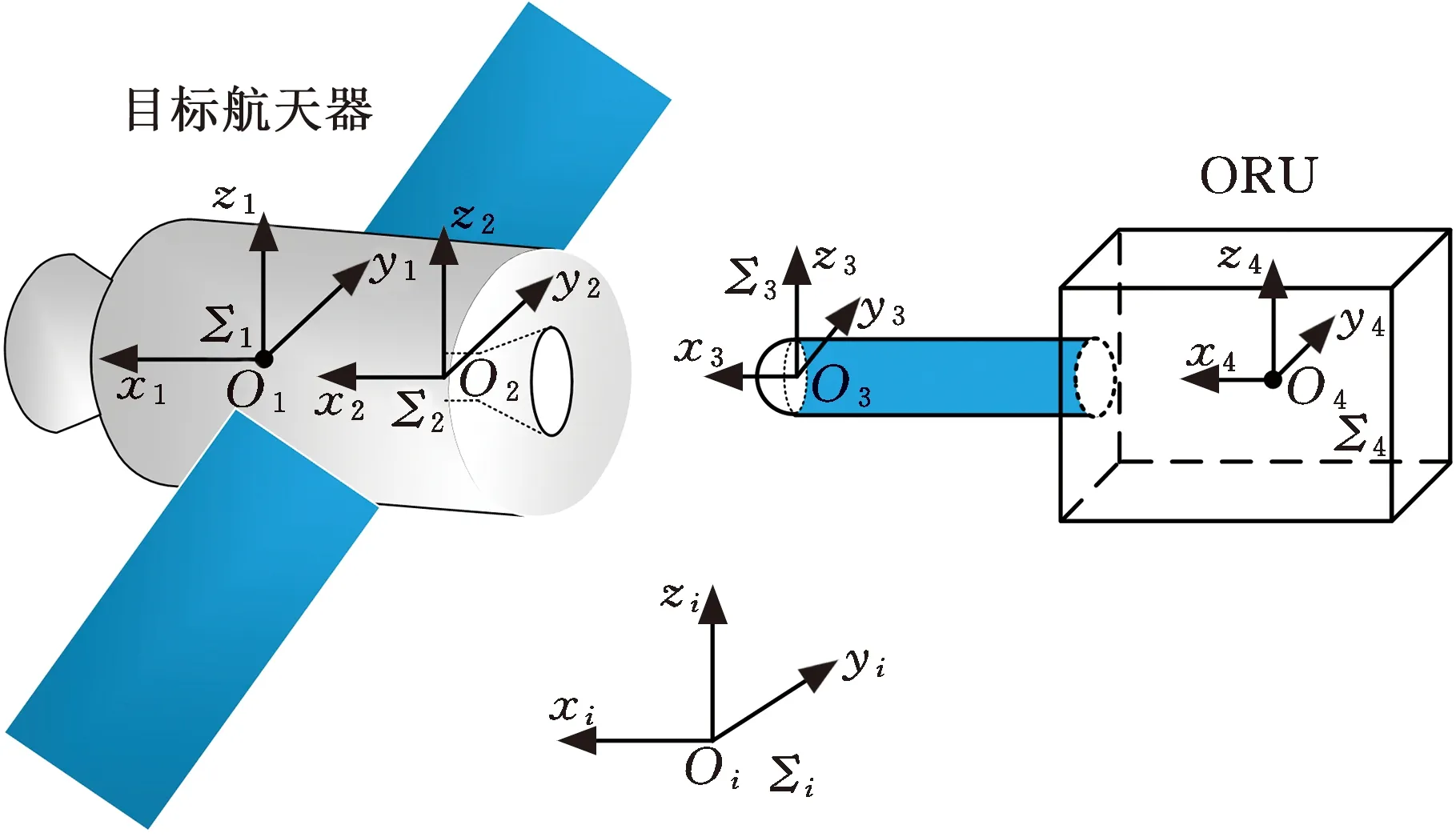
图2 坐标系定义Fig.2 Coordinate system definition
关于各坐标系的描述如下:①惯性坐标系Σ0,用以描述目标航天器、ORU姿态的参考坐标系;②目标航天器质心坐标系Σ1,原点O1建立在目标航天器质心;③ORU质心坐标系Σ4,原点O4建立在ORU质心;④定位锥孔基坐标系Σ2,原点O2建立在目标航天器锥孔几何中心;⑤定位导向杆球头坐标系Σ3,原点O3建立在导向杆球头的几何中心。
为描述航天器在6个自由度下的运动,定义6个独立的坐标来表示位置和姿态。用力和力矩来描述整个动力学系统。航天器动力学模型由空间运动下的Newton-Euler方程[17]建立。
引入斜对称矩阵算子S(·),Newton-Euler方程以矩阵形式表达如下:
(1)
C12=-mS(v)-mS(S(ω)rG)C21=C12
C22=mS(S(v)rG)-S(Iω)
rG=[xGyGzG]Tv=[vxvyvz]T
ω=[ωxωyωz]TF=[FxFyFz]T
τ=[τxτyτz]T
式中,m为航天器质量;E为3×3的单位矩阵;I为刚体的惯性张量;rG为ORU或目标航天器的重心位置坐标;v为航天器速度;ω为航天器角速度;F为作用于航天器的广义外力;τ为作用于航天器的外力矩。
如图2所示,两航天器的运动均是在其质心坐标系(Σ1,Σ4)下描述的,因此基于Newton-Euler法的目标航天器与ORU的动力学方程可表述为
(2)
(3)
式中,下标t表示目标航天器;下标o表示ORU。
由于式(2)和式(3)中所输入的力和力矩均作用于两航天器各自的质心位置,而定位导向过程中的接触碰撞是在计算坐标系Σ2和Σ3下研究的,因此需要将定位导向过程中作用于导向杆球头处与锥孔处的力和力矩转换到ORU与目标航天器质心位置处。
1.2 接触检测
图3为ORU定位导向机构定位时的示意图,目标航天器与ORU之间存在相对移动和相对转动,其中发生相互接触碰撞的元件是目标航天器上带有导向锥的锥孔表面和ORU上的定位导向杆顶端球头。本文在KARIM[17]锥杆机构的碰撞检测方法基础上进行了一定的改进,力求考虑到尽可能多的工况条件。
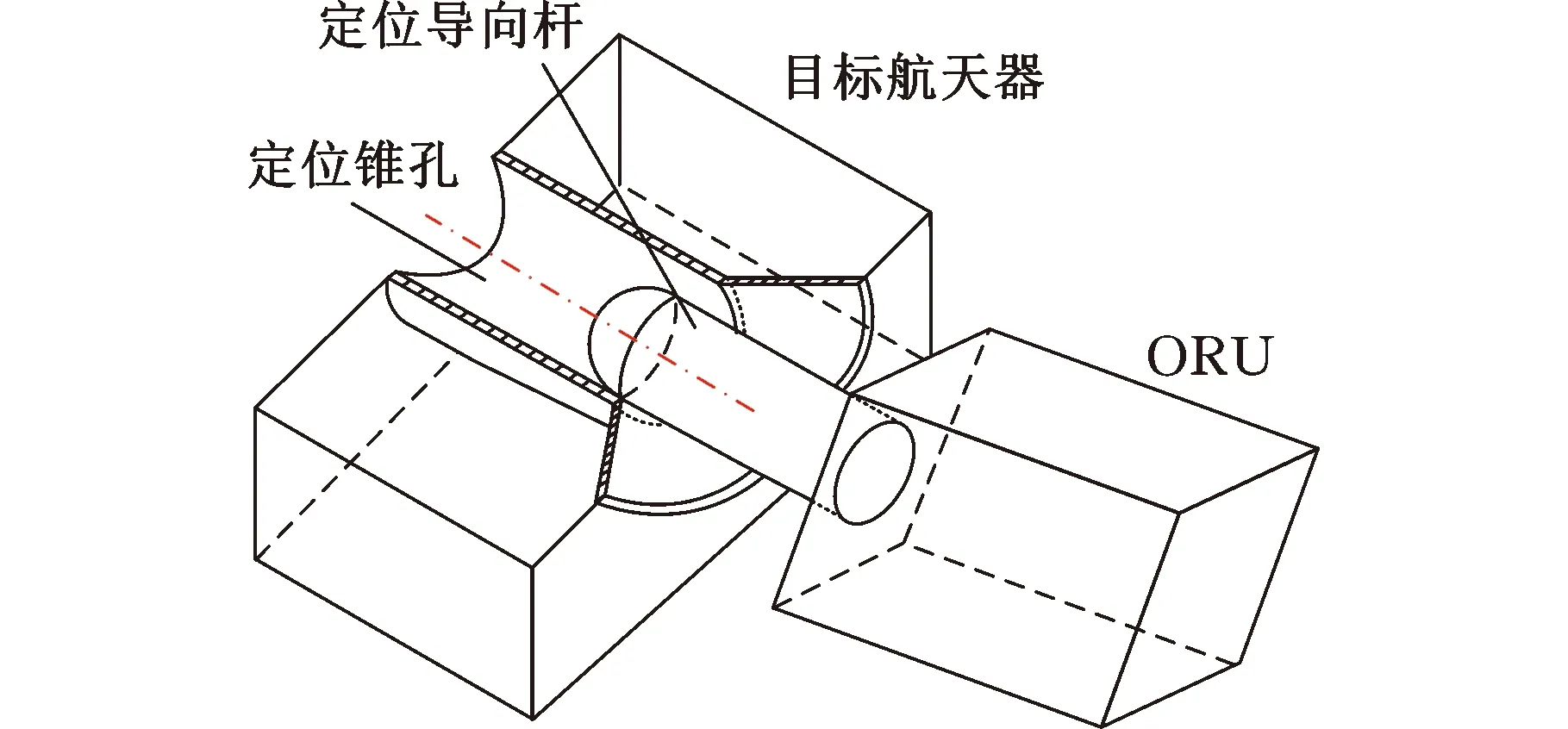
图3 定位导向机构定位导向示意图Fig.3 Positioning guiding mechanism positioning guiding schematic
由ORU定位导向机构的外形可知,根据ORU的定位导向过程可以将ORU导向杆划分为2个部分:导向杆圆柱区和导向杆球头区;将锥体划分为3个部分:锥体圆锥面区,锥体弧面过渡区,锥体圆柱孔壁区。如图4所示,定义导向杆与锥体相对运动期间可能发生的4类接触碰撞情况如下:①导向杆球头与锥体圆锥面的接触(图4a);②导向杆球头与锥体圆锥面、圆柱面过渡区的弧面发生的接触(图4b);③导向杆柱面与锥体圆锥面、圆柱面过渡区的弧面发生的接触(图4c);④导向杆球头与锥体圆柱孔壁发生的接触(图4d)。
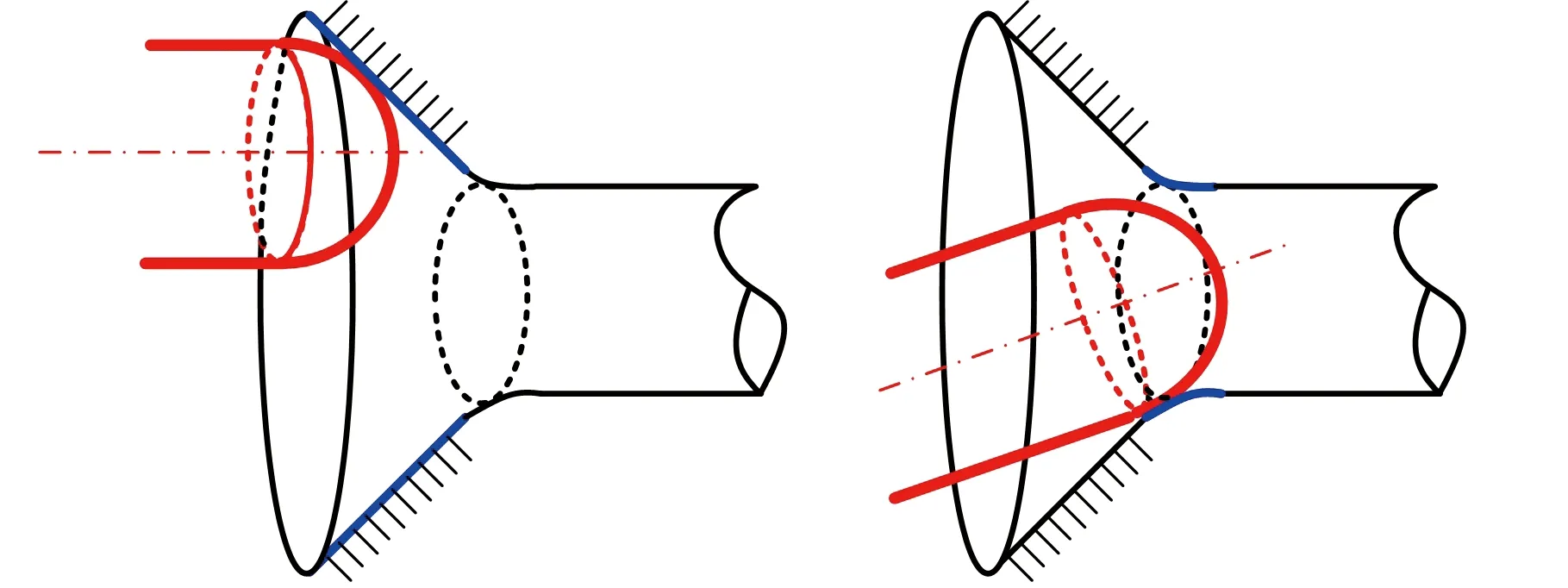
(a)球头-锥面接触 (b)球头-弧面接触
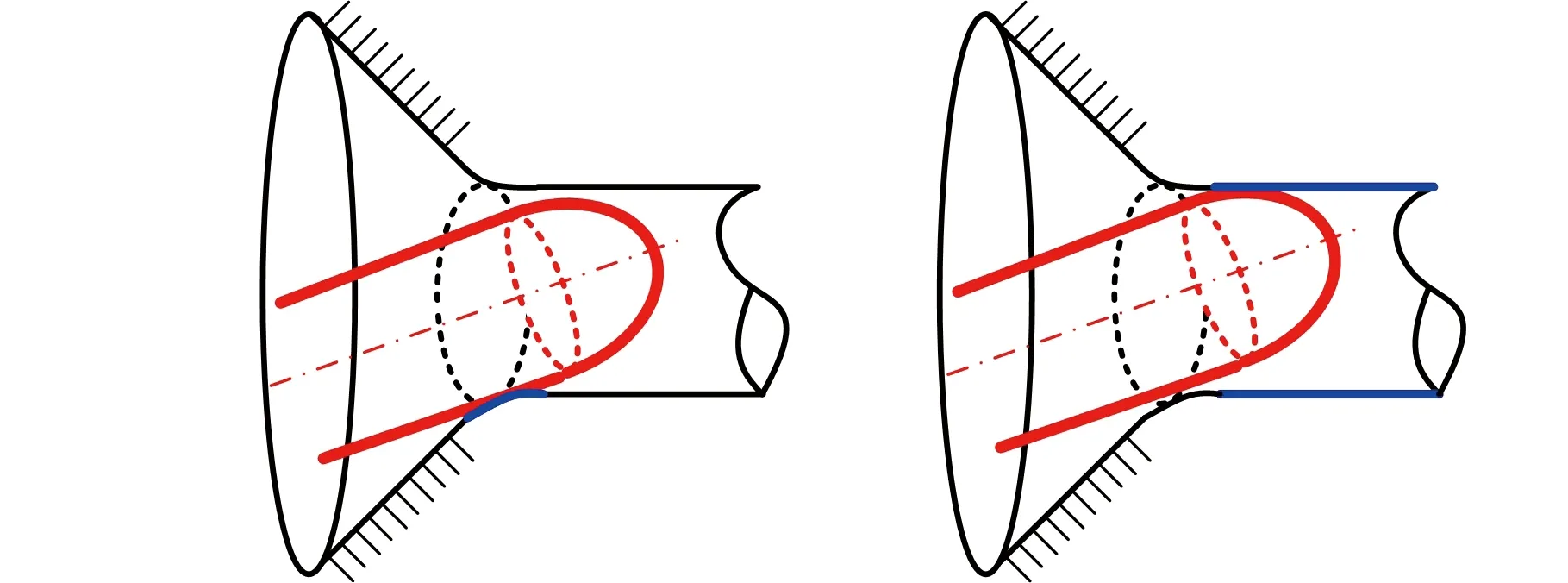
(c)柱面-弧面接触 (d)球头-柱面接触图4 导向杆与锥体可能发生的接触碰撞情况Fig.4 Possible contact collision between guide rod and cone
除以上4种接触情况外,还存在图4c接触工况和图4d接触工况同时存在的情况。在实际定位过程中,导向杆球头在与锥体圆柱孔壁接触后,可认为导向杆已进入锥体孔位,本文对此情况予以忽略。假设导向杆与锥体的4种接触情况均为点接触,碰撞检测的目的在于求解球头或导向杆圆柱面与锥体潜在接触点的距离,以及潜在接触点在计算坐标系当中的位置。4种接触情况中,图4a接触工况同图4d接触工况求解方法一致,区别在于这两种情况下的锥角不同:在图4d接触工况下,可以认定其锥角为0°,在图4a接触工况下,其锥角为锥面锥角。在圆柱孔与锥面过渡区域,按光滑过渡的圆弧面计算。
图5所示为ORU导向杆球头与锥面在三维空间中发生接触碰撞的情况,在截面1视图进行矢量分析。
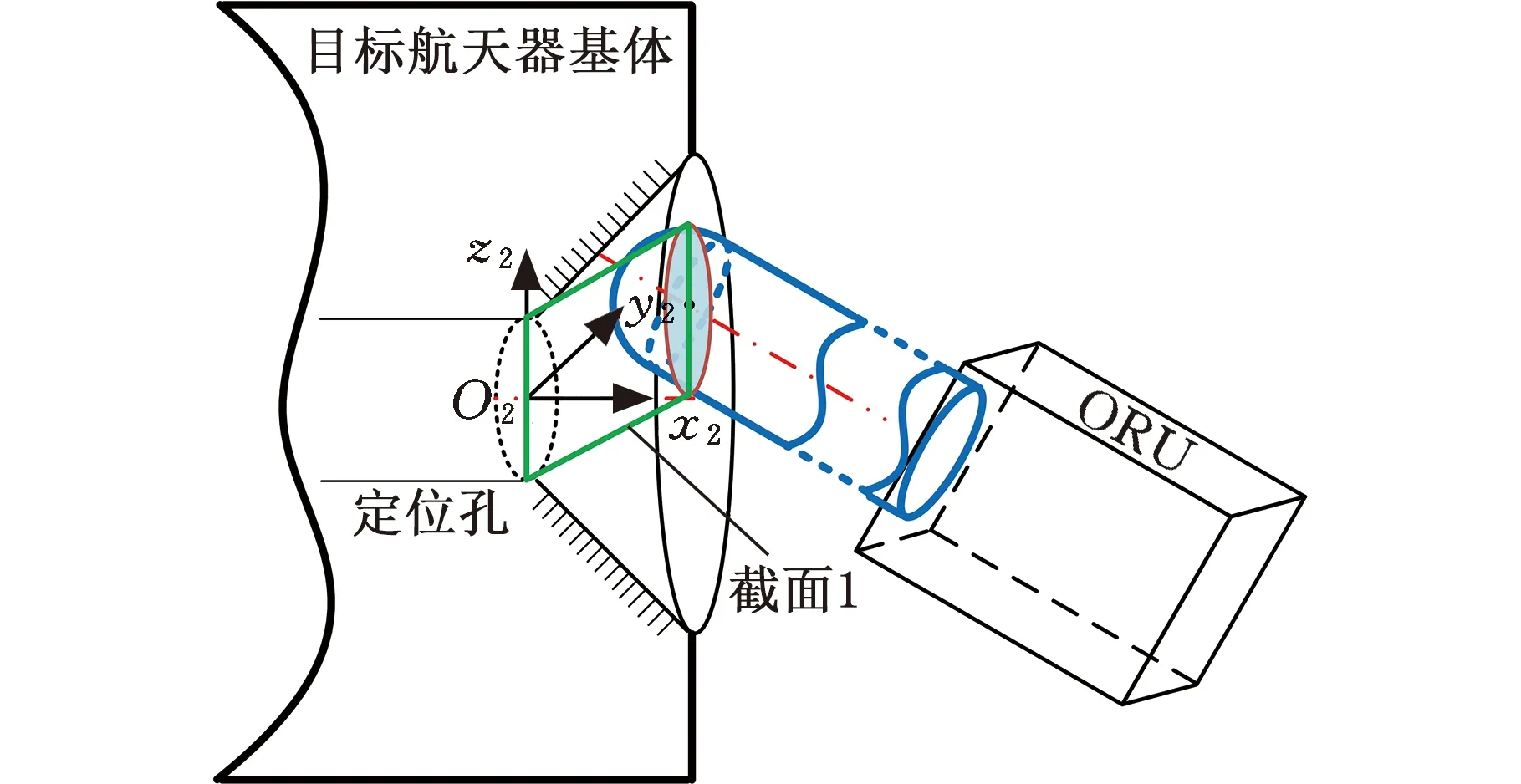
图5 杆-锥接触碰撞三维视图Fig.5 Three-dimensional view of the rod-cone contact collision
图6中l1为锥面底部至锥面顶端的长度(锥高),l2表示锥面底部至坐标系Σ3原点O3(球头球心)的距离,l3为yz平面上坐标系Σ3原点O3距锥面的距离,lp为球头球心在坐标系Σ2中的位置,r为球头半径,α为锥角,D为锥面横切面最大直径,d为圆柱孔直径,R为导向杆球头几何中心所在锥截面的半径,δ为导向杆球头表面与锥孔表面之间的最近距离,a为导向杆球头中心距锥面的最近距离。
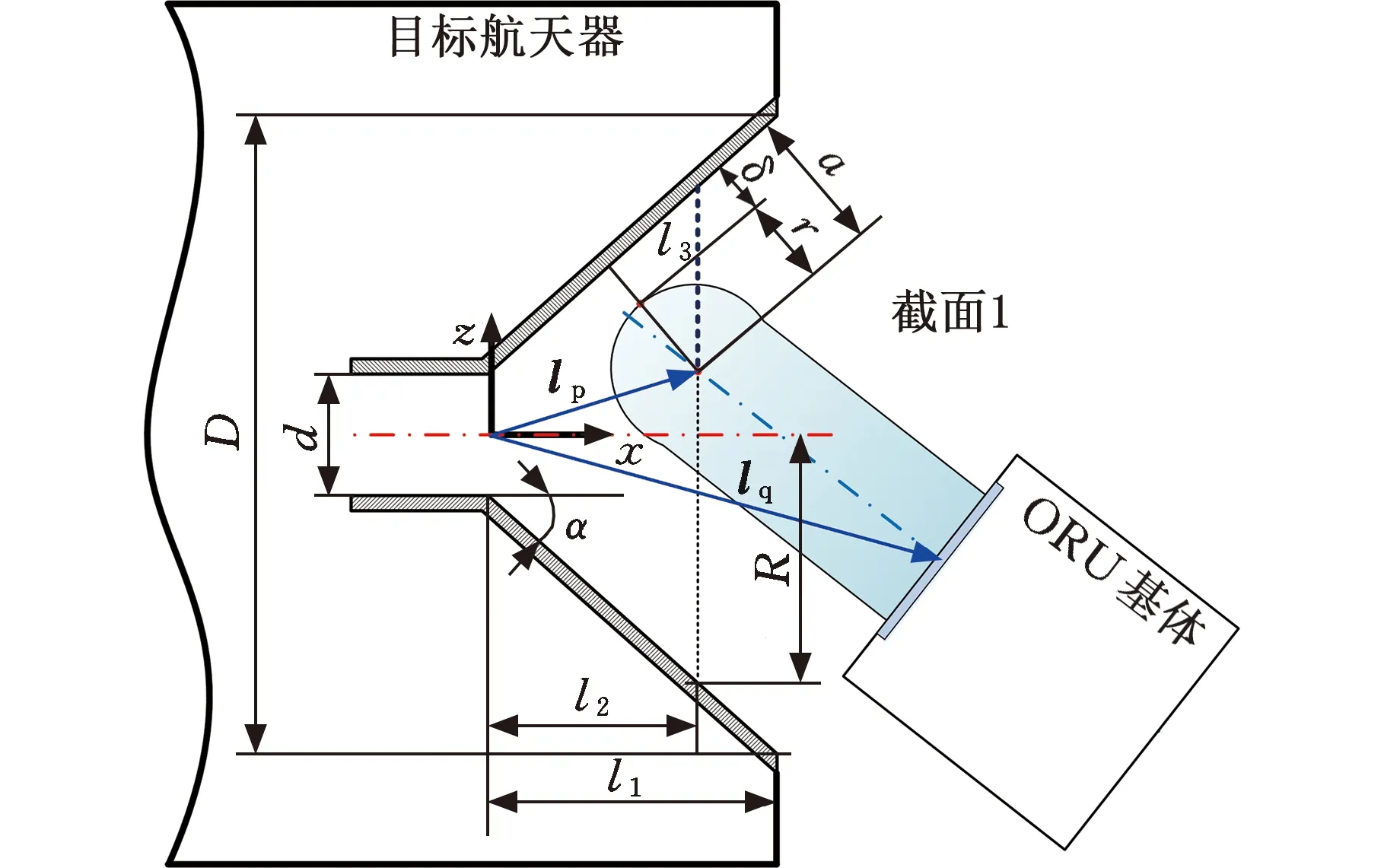
图6 锥面碰撞检测说明图(截面1)Fig.6 Illustration diagram of cone collision detection(section 1)
当导向杆顶端球头球心在锥面内发生位置变化时,lp、δ、a、R、l3均为变量。由图6所示的几何关系,有
l2(t)=lpx(t)
(4)
lp=(lpx,lpy,lpz)lq=(lqx,lqy,lqz)
其中,t为时间;lq为导向杆基座中心在计算坐标系中的位置矢量。结合yz平面中的几何关系,有
(5)
R=tanα(lpx(t)-l1)+0.5d
由l3可继续推导求得球头球心与锥面的最近距离a以及潜在碰撞点距锥面的最近距离δ:
a=l3cosα
(6)
δ=a-r
(7)
设导向杆轴向与计算坐标系x轴的夹角为βx,与y轴的夹角为βy,与z轴的夹角为βz。则有
(8)
图7示出了发生接触时各力的矢量方向,其中,Ft、Fo为目标航天器与ORU的接触碰撞力矢量;ft为目标航天器摩擦力矢量;fo为ORU摩擦力矢量。各个力的单位矢量为
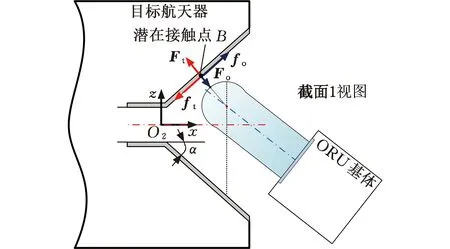
图7 矢量力示意图(截面1)Fig.7 Schematic diagram of vector forces(section 1)
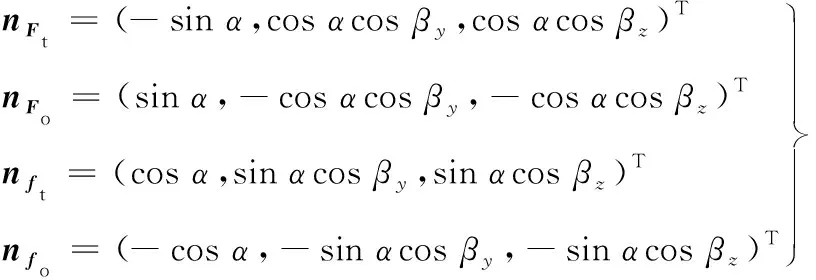
(9)
则潜在接触点B的位置为
O2B=lp-anFt
(10)
对于球头-弧面接触情况,有图8所示的几何关系。在该区域球头球心距接触点最近距离a满足以下关系:
a=|lp-lk|
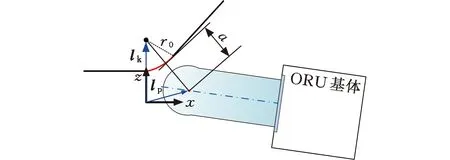
图8 球头-过渡弧面碰撞检测说明图Fig.8 Ball head-transition arc collision detection illustration diagram
(11)
式中,lk为弧面圆心在计算坐标系中的位置矢量;r0为弧面半径大小。
由式(7)可知,该接触工况下与潜在接触点的最近距离为δ。柱面-弧面接触情况下,满足图9所示的几何关系。在该接触工况下,导向杆轴线距锥体接触点最近距离a满足:
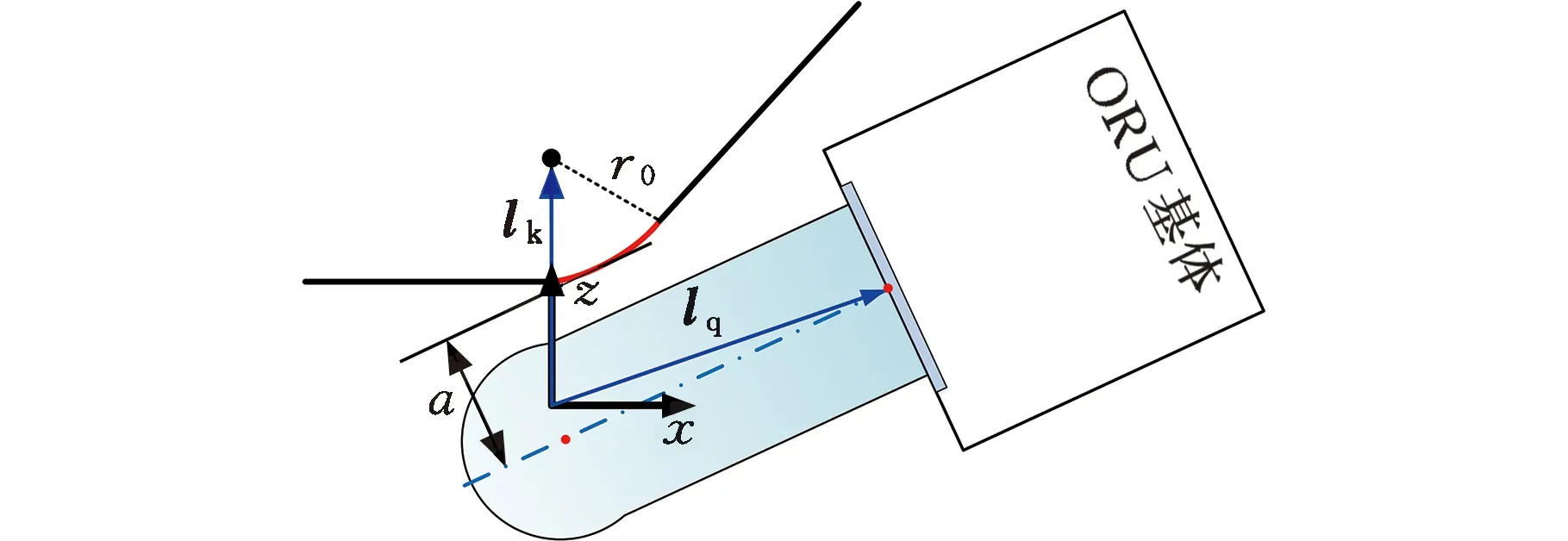
图9 柱面-过渡弧面碰撞检测说明图Fig.9 Column surface-transition arc collision detection illustration diagram
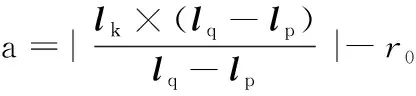
(12)
潜在接触点间的最近距离
δ=a-r
(13)
在球头-圆柱孔内壁接触情况下,锥角α为常量0°,R为常量(0.5d)。潜在接触点的位置及最近距离求解方法与锥面接触工况下相同。
1.3 接触力学模型
多体动力学中连续接触力模型一般由弹性力分量和阻尼力分量组成,其碰撞力模型的一般通式[18]为
(14)
(15)
式中,μ为材料泊松比;E为弹性模量。

(16)
阻尼力分量部分取g=δn,q=1,n=1,则LN碰撞力模型表达式为
(17)
以修正的Coulomb摩擦模型来计算切向摩擦力,该模型能够准确地表达两接触体在相对运动中产生的摩擦现象,其表达式为[21]
(18)
式中,vT为切向速度值;v0、v1为指定的速度误差值;Fc=μk‖FN‖表示Coulomb摩擦力;μk为摩擦因数;FN为法向力。
2 动力学模型验证
图10所示为简化后的两航天器模型,数值仿真的初始参数值如表1所示。
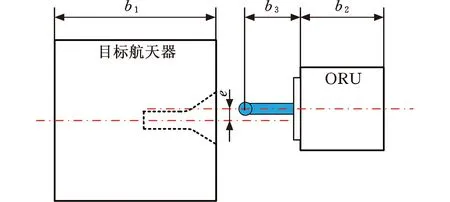
图10 定位导向过程的实际情况Fig.10 Actual situation of the positioning guiding process
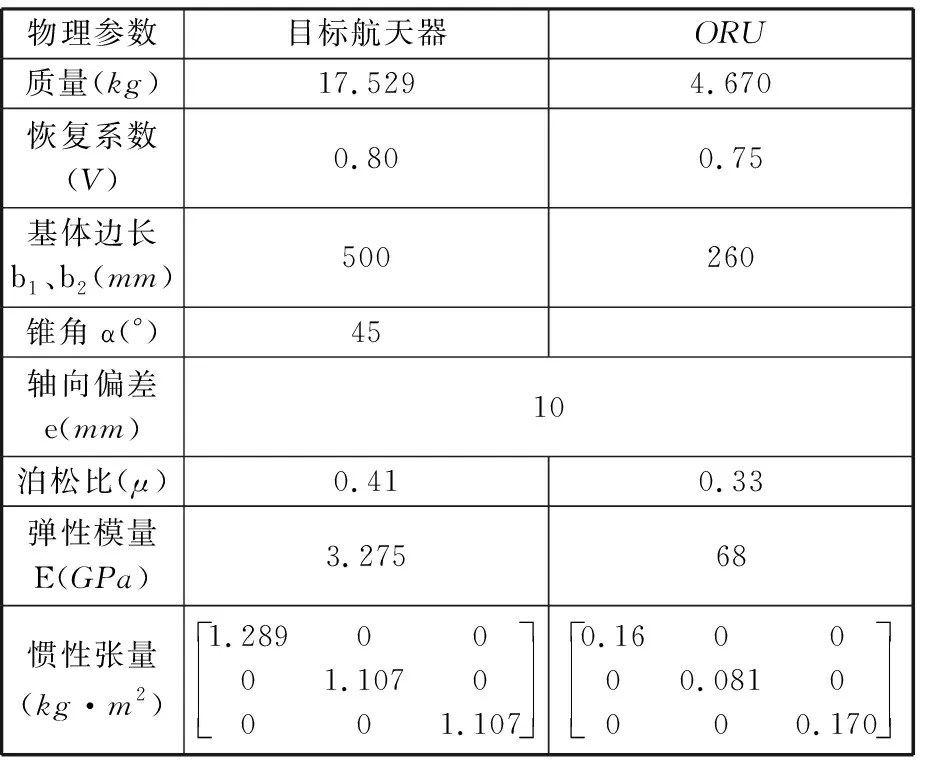
表1 两航天器的初始物理参数Tab.1 Initial physical parameters of the two spacecraft
设定目标航天器与ORU的其他初始物理参数信息包括二者的质量、惯性张量、发生接触碰撞的材料的恢复系数,如表1所示。将所有给定的初始参数输入碰撞动力学仿真模型进行仿真。
根据一般ORU定位导向系统的技术要求,采取导向杆轴线与导向孔位轴线的最大径向容差为10.0 mm。这种工况下属于定位成功的典型工况,导向杆与目标航天器锥孔的初次碰撞将发生在锥孔的锥面处,随即进入圆柱孔,并与圆柱孔过渡区域、圆柱孔壁进行后续接触,完成定位导向工作。这种工况下,假设导向杆轴向与x轴的角度偏差为0°,ORU与目标航天器无相对角位移,相对位移为(0.50,10×10-3,0)m,ORU的相对接近速度可表示为(-0.10,0,0)m/s,初始角速度为(0,0,0)rad/s。
采用有限元LS-DYNA及王添民[22]提出的基于Lagrange方法的锥杆式对接机构的动力学模型(L模型)对上述理论模型进行对比验证,并模拟ORU到目标航天器的定位导向和接触碰撞的过程。初始设定ORU与目标航天器的纵向偏差为10.0 mm,ORU相对于目标航天器的速度为0.10 m/s,设定碰撞过程的持续时间为0.10 s,静摩擦因数为0.3,动摩擦因数为0.2,模型的求解时间步长为8.3×10-8s。
图11为三种模型在锥面区域的接触碰撞过程中碰撞力的时间历程曲线,NE-CR-LN模型同文献[22]中的L模型比较,二者采用不同的接触检测算法。由图11可知,在时刻1.903 s、1.906 s、1.909 s处,L模型在导向杆和锥面的距离检测上存在一定程度的判别误差,较其他两种模型在锥面接触检测时间上相对滞后,影响其动力学模型的精确性;此外文献[22]中模型在接触力的求解方法上以系统级别的缓冲力取代具体的阻尼力,而本文NE-CR-LN模型综合考虑实际接触工况下的弹性力和接触阻尼力影响,通过将冲击碰撞体的动能损失与由于内部阻尼而在系统中耗散的能量联系起来,最终得到滞后阻尼系数的表达式,使得在导向杆与导向锥的接触响应更为准确。总体上,NE-CR-LN模型与文献[22]模型碰撞力的变化曲线趋势大致相近,亦侧面验证了NE-CR-LN模型的有效性。
图11 三种模型下碰撞力的变化情况Fig.11 Variation of collision force under three models
图12为本文碰撞检测算法在锥体中计算的潜在接触碰撞点坐标随时间变化的轨迹图。仿真过程中导向杆均在xoy面内活动,z轴坐标变化值极小,予以忽略。在导向杆进入锥体过程中,根据相应的接触搜索算法,在每一时间步ORU导向杆与锥体可能发生接触点的位置坐标在不断变化,总体上,文中接触搜索算法能大致判断导向杆所在区域。
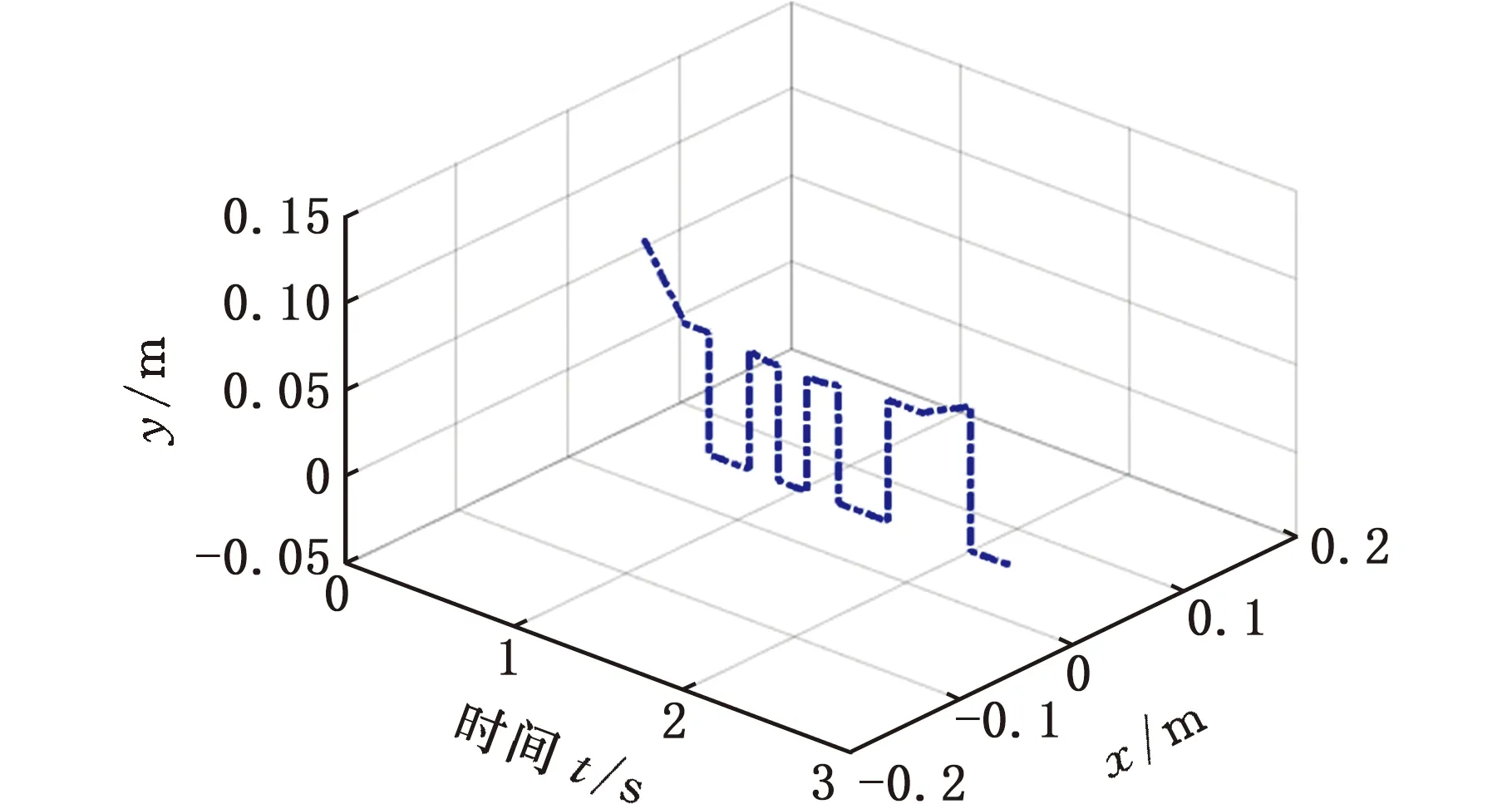
图12 潜在接触点的计算Fig.12 Calculation of the potential contact point
3 导向过程动态仿真
一般典型工况下的数值仿真仍以表1中基础参数为准,在此工况下ORU导向杆与目标航天器预先进行了连接前的精确校准,设定导向杆与导向孔位的最大径向容差为30.0 mm。这种工况下导向杆与目标航天器锥孔的初次碰撞将发生在锥孔的锥面处,随即进入圆柱孔,并与圆柱孔过渡区域、圆柱孔壁进行后续的接触,完成定位导向工作。这种工况下,假设导向杆轴向与x轴的角度偏差为5°,球头中心与锥体坐标系Σ2原点O2之间的相对位移为(0.50,30×10-3,0)m,ORU的相对接近速度可表示为(-0.0996,8.72×10-3,0)m/s,初始角速度为(0,0,0)rad/s。
图13所示为ORU导向杆顶端球头球心位置的变化轨迹。根据初始条件,接触碰撞过程中的参数变化在xoy平面内发生,对z轴方向的影响极小,忽略不计。由图13可了解到ORU导向杆球头中心从B0位置出发,在定位导向过程中总共与锥孔表面发生3次接触碰撞,接触点位置B1、B2、B3分别对应了锥面、锥面与圆柱孔过渡面、圆柱孔面的接触。图中轨迹在yoz平面的投影即为球头球心在y方向的变化情况,轨迹在xoz平面的投影即为球头球心在x轴方向的变化情况。
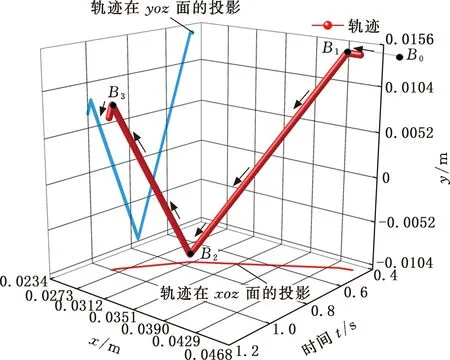
图13 导向杆球头球心导向过程中的运动轨迹Fig.13 The trajectory of the guide rod ball head during ball center guiding process
图14为ORU与目标航天器定位导向过程中关键时刻的状态图,仿真过程中ORU导向杆球头与目标航天器锥孔历经三次接触碰撞,导向杆球头首先与目标航天器的锥壁发生接触,之后在锥面与圆柱孔过渡区域发生接触,整个导向阶段以最后导向杆机构与圆柱孔壁发生最终碰撞而结束。

(a)B1位置 (b)B2位置 (c)B3位置图14 与锥孔的各接触状态Fig.14 Each contact state with tapered hole
图15为ORU质心与目标航天器质心x向与y向相对速度在初次接触时的变化曲线。接触发生时刻前,ORU导向杆球头球心初始位置与目标航天器x向的相对速度为0.0996 m/s,在首个碰撞点B1位置处与锥面发生接触后,x向的相对速度有所减小,首次接触结束后x向的相对速度减小至约0.042 22 m/s,在第二次接触(B2)后x向的相对速度减小至约0.019 11 m/s,第三次接触(B3)后,x向的相对速度减小至约为0;y向的相对速度在接触发生之前一直保持为0.008 72 m/s,由于与锥面发生接触,两碰撞体均受到y向的作用力,使得质心产生y向的加速度,到初次接触结束时刻,ORU与目标航天器的y向相对速度增大至0.081 73 m/s,到第二次接触结束时刻,ORU与目标航天器的y向相对速度增大到0.083 96 m/s,在导向完成时,ORU与目标航天器在y向的相对速度增大至0.096 m/s。
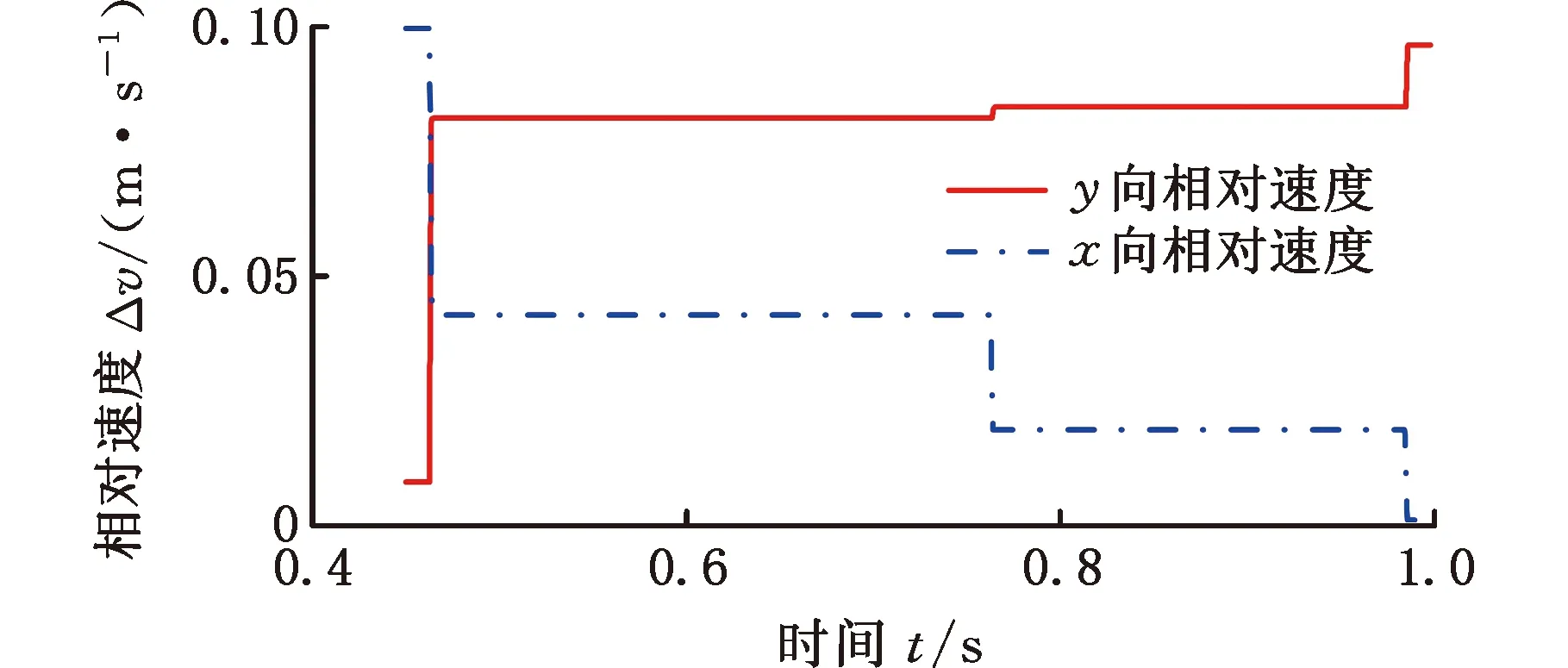
图15 相对速度-时间历程曲线Fig.15 Relative velocity time course curve
图16所示为ORU和目标航天器在目标航天器的体坐标系(Σ1)下的质心速度变化情况。根据式(2)、式(3),施加在两航天器上的力和力矩在每一时间步发生变化,进而更新目标航天器与ORU的位置和方向,此时二者的速度也获得更新。ORU的x轴上的速度始终为负值,并一直由负值向正值波动,这是由于碰撞发生时,作用在ORU上的反作用力沿x轴正向。接触碰撞过程对ORU和目标航天器在z轴方向的影响极小。三次接触之后,ORU相对于目标航天器在x向的速度趋于0,表明ORU的成功定位。
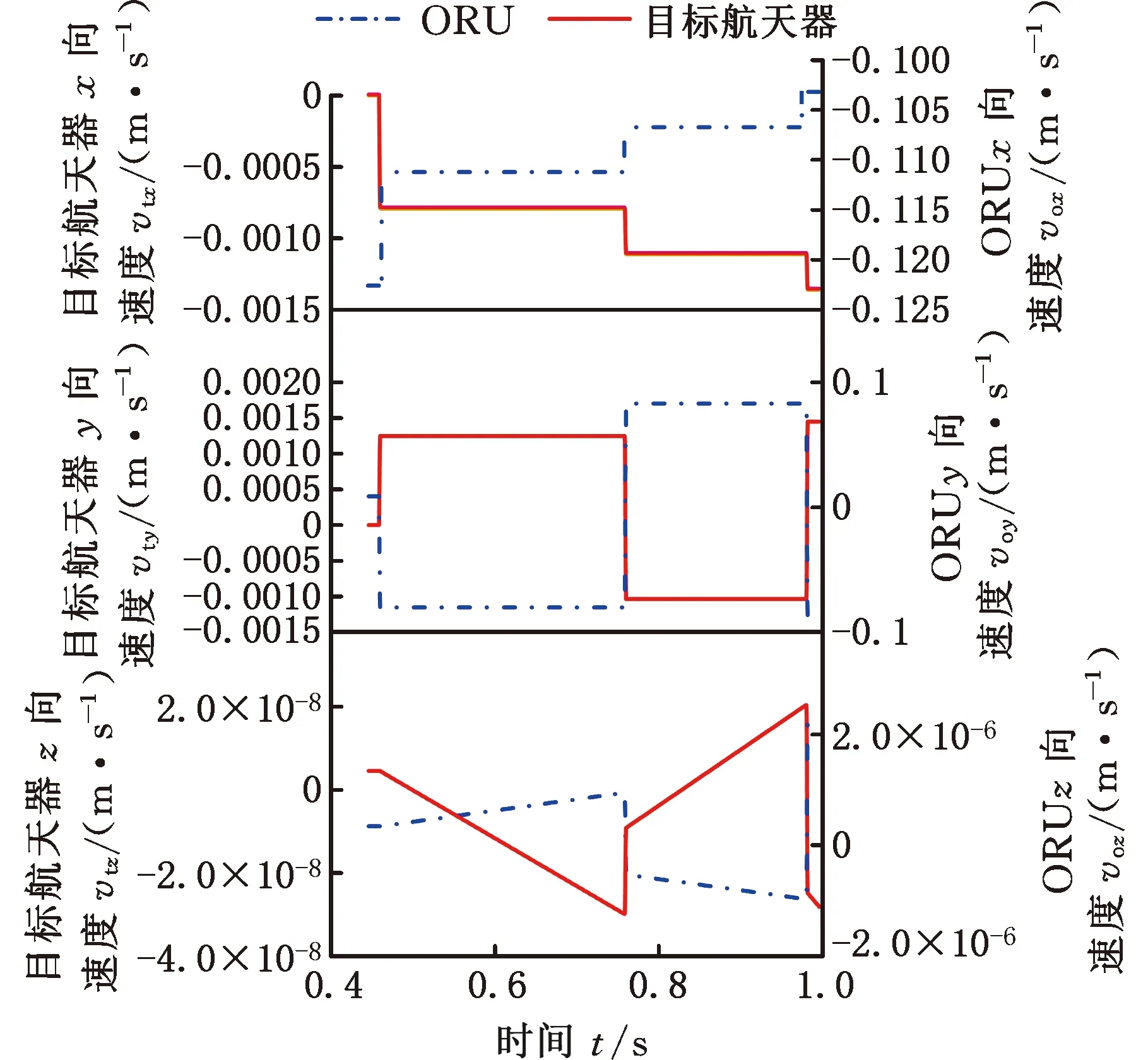
图16 速度-时间历程曲线Fig.16 Velocity time course curve
图17所示为ORU与目标航天器在导向过程中导向杆与锥形孔发生接触碰撞力的变化情况。由图17可知,在进行导向过程中,仿真过程中总共发生过3次接触,分别发生于锥面区域、锥面与圆柱孔过渡面以及圆柱孔壁,均为球头端与锥体的接触。
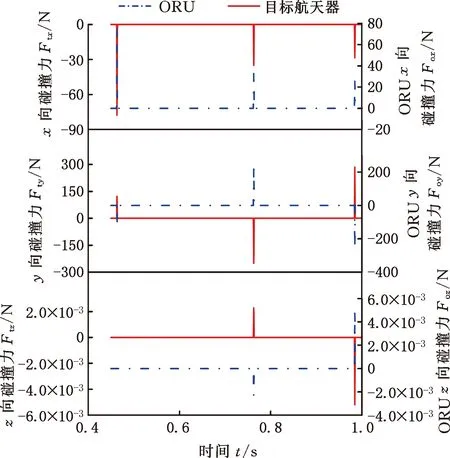
图17 碰撞力-时间历程曲线Fig.17 Time course curve of collision force
根据式(2)、式(3),x向的3次接触碰撞力峰值随着x向相对速度的衰减而衰减,而y向的3次接触碰撞力峰值随着y向相对速度的增大而增大。因此,ORU与目标航天器导向过程中接触碰撞力的峰值大小与两航天器相对速度成正相关关系,表明多次接触碰撞的位置越靠近锥孔底部,x向的相对速度越小,x向的接触力峰值也越小;与此同时y向的相对速度越大,y向的接触力峰值也越大。
4 试验分析
图18所示为碰撞试验系统的组成:配备直线电机的导轨、安装有导向杆的ORU、安装有导向锥的目标航天器、恒流适配器、数据采集卡及运动控制系统。
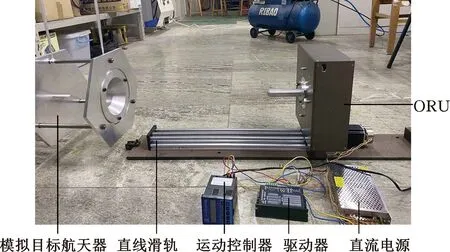
图18 地面碰撞试验系统Fig.18 Ground collision test system
试验中,模拟目标航天器采用被动式重力补偿悬挂法,被动式补偿重力的方法一般仅含一个克服重力的补偿系统,缺少随动移动系统,但重力补偿效果可达到0.8 N,试验中以延长悬挂绳索长度的方式增加补偿重力的影响。接触碰撞力数据通过碰撞期间安装在导向锥上附加高精度三轴向加速度传感器的数据采集系统获取。试验数据采集系统主要组件包括高精度三轴向加速度传感器、信号放大器及数据采集装置。以模拟目标航天器为测量对象,测量目标航天器3个轴向方向的加速度信息,以间接方式获取到接触碰撞力的大小。
4.1 加速度传感器数据分析
由于试验条件限制以及数值仿真过程中对z轴方向的参数并无影响或影响极小,试验结果处理中忽略z轴方向的加速度,仅研究x、y轴向的加速度变化情况,在试验结果处理中,根据试验中三轴向的加速度变化情况,基于模拟航天器的质量属性计算出其接触过程中力的大小,与仿真模型中的碰撞力的对比如图19、图20所示。
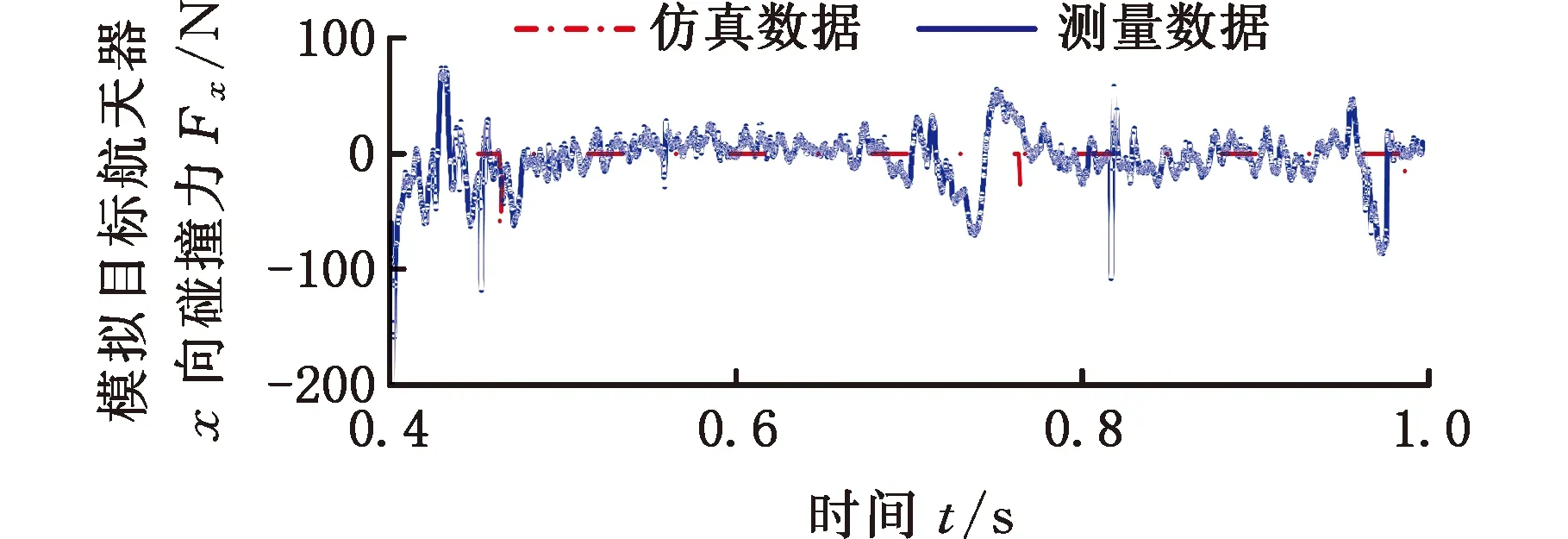
图19 模拟目标航天器x向碰撞力变化对比Fig.19 Comparison of simulated target spacecraftx-directional collision force variation
对比两种方式获取的目标航天器速度的变化情况可以了解到,就趋势而言,随着导向杆伸入锥体,试验所间接获取的接触碰撞力的变化趋势与仿真模型的结果趋势在一定程度上较为吻合。试验测量相比仿真模型在发生接触的时刻略微有所提前,仿真模型依据接触碰撞理论在接触碰撞发生后随即发生弹开,而在实际试验中在所有发生的几处接触情况,并不都会发生弹开的现象,譬如在首次接触中导向杆球头端将始终与锥面接触,以滑动方式持续短暂一段时间。
4.2 误差分析
试验中三轴加速度传感器输出数据与仿真结果之间的误差原因主要体现在以下几个方面:
(1)试验对象与仿真模型参数设置上存在差异。在ORU物理样机的加工中,为便于试验装置安装于直线导轨上,实际加工中精简了ORU内部无负载空间,仅保留了机电液接口的负载部分,最大程度满足试验需求。另一方面,采取锥体加配重的结构方式模拟目标航天器的质量及惯性张量,与实际结构存在差异。
(2)悬挂装置不存在完全静止的状态,其摆动对传感器数据的输出造成干扰。
(3)ORU与导轨、加速度传感器与模拟目标航天器之间存在安装误差,可能受到由于安装误差而产生的摩擦影响。
(4)在二者质量、惯量属性相近的情况下,受导轨限制的ORU一定程度上会限制目标航天器的运动,这与模拟目标航天器的实际工况存在差异;而当ORU质量、惯量属性显著小于模拟目标航天器时,它对目标航天器形成的姿态误差可忽略。
5 结论
(1)针对空间在轨服务过程中的在轨替换模块定位导向问题,根据定位导向系统的结构特点,基于Newton-Euler运动方程、锥-杆的碰撞检测分析及非线性碰撞模型推导了NE-CR-LN接触动力学模型的建模方法,该模型克服了导向过程中高度非线性时求解接触动力学方程的困难,并对类似结构的航天器的导向、对接过程具有良好的适用性。
(2)根据锥-杆式导向机构的几何特点,将导向杆球头与锥孔的接触情况分为4种(球头-锥面接触、球头-弧面过渡区接触、柱面-弧面过渡区接触、球头-圆柱孔壁接触)。以实际定位过程的位姿状况为前提,应用矢量分析方法推导了三维空间中的锥-杆的接触碰撞方程。通过接触碰撞方程求解了潜在接触点的位置以及导向杆球头距锥孔最近的距离,并判断是否发生接触碰撞,由此得到较为精确的碰撞点预测模型。
(3)通过将模型数值结果同LS-DYNA仿真结果及其他文献模型进行对比分析,侧面验证了NE-CR-LN动力学模型的正确性。在一般典型的定位导向工况下,考虑非线性碰撞模型对ORU定位导向过程的扰动影响进行仿真与试验,仿真结果与试验结果表明,ORU导向杆球头在导向过程中依次与目标航天器锥面、锥-孔弧面以及圆柱发生接触,导向过程中导向杆与锥体在导向方向的相对速度逐渐趋同,接触碰撞力的峰值逐渐减小,在目标航天器惯量/质量远远大于ORU惯量/质量的情况下,导向过程中的接触碰撞扰动对目标航天器的影响很小。文中NE-CR-LN三维接触动力学模型可以较为精确地模拟实际的接触碰撞过程,可满足动力学实时仿真的需要。
