融合无人机影像点云与三维激光点云的建筑物三维建模研究
2022-10-06王冬梅
周 益,檀 丁,谢 亮,王冬梅
(1.南京工业大学测绘科学与技术学院,江苏 南京 211800;2.泰州市地理信息测绘院,江苏 泰州 225300;3.江苏省水利科学研究院,江苏 南京 210017)
0 引 言
利用无人机影像与三维激光扫描进行建筑物建模是当前国内外研究的热点问题。在国外,Besl P J等[1]利用激光测距仪对米开朗琪罗雕像进行了数字三维模型重建;Park Haekyung[2]利用无人机监测Hantan-Imjin River地区国家地质公园,并利用无人机影像数据和StM算法建立三维模型。在国内,徐光冀[3]利用三维激光扫描技术采集三峡古建筑点云数据,并对出土的文物进行了数字化三维重建;丁军[4]等利用摄影测量技术获取了安丙家族墓地的航空影像,数据获取效率高且能真实反映遗址的表面形态,为墓地发掘提供了基础地形数据。张文春[5]等利用三维激光点云联合无人机影像进行三维重建,建立了高精度的古建筑的三维模型。上述研究均存在一定的缺陷:三维激光扫描技术效率低,基站式扫描存在扫描盲区;摄影测量精度低,存在因遮挡导致的模型扭曲现象;融合三维激光与无人机影像虽然能有效弥补数据的缺失,但“点云+影像”的融合方法较难解决模型变形扭曲的问题[1-9]。
针对上述建筑物建模方法存在的不足,本文提出一种融合无人机影像点云与三维激光点云的建模方法。通过坐标转换与配准统一点云的空间基准,结合LNVD-DBSCAN算法与点云滤波进行点云空间重构,并验证该方法的有效性。
1 三维激光扫描与无人机影像点云融合
1.1 基于布尔沙模型与ICP算法的点云坐标系统一
利用光线束法区域空中三角测量可以进行区域整体平差,解算加密点的空间坐标,将无人机影像转化为影像点云,无人机影像点云与三维激光点云均为正交的空间直角坐标系,可添加同名控制点转换至同一空间直角坐标系下。
布尔沙模型[10-11]是经典的相似变换模型。平移原坐标系坐标原点,旋转坐标轴方向使坐标轴指向与目标坐标系保持一致,对坐标轴进行尺度缩放,实现坐标系的转换。由于坐标系在各个方向上的缩放比例近似相等,以一个缩放参数代替表示,3个旋转角度都极小,以角度值替代其角度正弦值,其坐标转换模型如式(1)所示。
(1)
式中,x1、y1、z1为初始坐标系O-X1、Y1、Z1坐标;x2、y2、z2为目标坐标系O-X2、Y2、Z2下坐标;tx、ty、tz为平移参数;εX、εY、εZ为旋转参数;M为尺度参数。
经过布尔沙模型变化过点云满足迭代最近邻点(Iterative Closest Point, ICP)算法的求解姿态,即距离最近点即为匹配点,继续求解旋转关系R与平移关系t最小化式(2)。
(2)
可以分别求得旋转关系R与平移关系t表示为:
(3)
R=VUT
(4)
t=ux-Rup
(5)
式中,ux、up为两组点云的质心,xi、pi为去质心化后两组点云的坐标。
利用上述方法统一无人机影像点云集A与三维激光点云集B,式(2)的值为空间基准转换后点云精度。
1.2 建筑物影像点云提取与噪声剔除
地面三维激光扫描难以获取建筑物屋顶数据,无人机影像点云因建筑屋顶的遮挡存在点云噪声。利用影像点云A弥补三维激光点云屋顶面的缺失,以三维激光点云B为基准剔除影像点云噪声,可将2种点云融合成建筑物点云C。
1.2.1 基于LNVD-DBSCAN聚类算法建筑物屋顶面影像点云提取
顾及建筑物的屋顶面点云在空间域与法向量特征域存在特性,采用LNVD-DBSCAN[12]聚类算法提取建筑物屋顶面的点云,根据同类型点云法向夹角较小特点聚类,引入高程参数合并分割,最终得到建筑物屋顶面点云。
LNVD-DBSCAN聚类算法是一种基于区域种子点的聚类算法,分为种子点选取,邻域扩充和面片验证与合并3个部分,包括以下3个步骤:
(1)首先确定种子集,令M为建筑物点云中任一点,则其K邻域可表示为:
(6)
则M的法向量nM和曲率kM可用领域协方差矩阵CM的特征值与特征向量表示为:
(7)
式中,λ0、λ1、λ2分别为CM的特征值,满足λ0≤λ1≤λ2,V0为λ0对应的特征向量。根据曲率的变化动态确定曲率的采样间隔ΔK为:
(8)
式中,Ks表示所有点云曲率,Kmin表示曲率的最小间隔,利用累计直方图确定曲率阈值,得到种子点集。
(2)根据种子点集及其特征扩充领域范围,首先,定义扩充后的点M的δ邻域δM为:
(9)
式中,Q表示点M的δ邻域点,nQ、nM分别表示Q、M的单位法向量,θ表示法向量夹角。以初始邻域为基本单元依次处理点集中未标记点,得到若干初始点集。
(3)面片验证与合并,根据点云特征分别获取相邻屋顶面的距离,屋顶面法向量夹角,屋顶面垂距等经验参数,根据上述经验参数合并屋顶面片。部分复杂屋顶面包含若干相互不平行的屋顶面片,可以引入预设高程参数进一步验证合并屋顶。
1.2.2 基于三维激光点云的非屋顶面影像点云噪声剔除
对于已统一空间基准的无人机影像点云A与三维激光点云B,可用E(R,t)的值表达统一后点云精度,且由于三维点云精度较影像点云高,故以三维激光点云作为基准,对非屋顶面点云进行降噪处理。
采用半径滤波方法处理影像点云A。若A中存在点a,b为三维激光点云B中距离最接近a的点,两点间距离d满足:
(10)
则认为点a属于所构建的融合点集C;反之,则将点a作为噪声点去除。
2 基于NURBS曲面的建筑物影像点云与三维激光点云融合建模
顾及建筑结构的复杂特征,采用拓展性、稳定性强并且可精确表达自由曲面的非均匀有理B样条曲面[13-14](Non uniform rational B-spline,NURBS)重构古建模型。一张M×N的NURBS曲面的有理多项式函数可表达为式(11):
(11)
U=[u0,u1...um+1]
(12)
W=[w0,w1...wm+1]
(13)
式(11-13)中,Vi,j为控制顶点,组成带拓扑的控制网格,Wei,j为顶点处的权因子;Bi,N(U)和Bj,M(W)分别为U向N次和W向M次样条基函数。式(11)和式(12)分别为U向和W向的节点矢量。
基于NURBS曲面生成原理,通过降采样、格网化、曲面拟合,将融合后点云C转化为NURBS曲面[15]。
3 建模案例分析
本文以某建筑为例进行建模实验,得到建筑物点云与模型如图1所示。
三维激光点云较好表达建筑物结构及纹理,但受遮挡缺少屋顶面点云,无人机影像点云获取建筑物屋顶点云,但非屋顶面点云出现扭曲,纹理错位的情况。
利用前文所提方法统一两组点云的空间基准、提取影像点云屋顶面、剔除影像点云噪声生成融合点云,如图2所示。
利用NURBS曲面重构融合点云,生成模型如图3所示。
为验证融合模型的精度,通过全站仪测量屋脊、吻兽、门、窗等散点与线[15],与倾斜摄影模型精度对比,结果如表2、表3所示。

表2 倾斜摄影模型与融合模型点位误差/cm
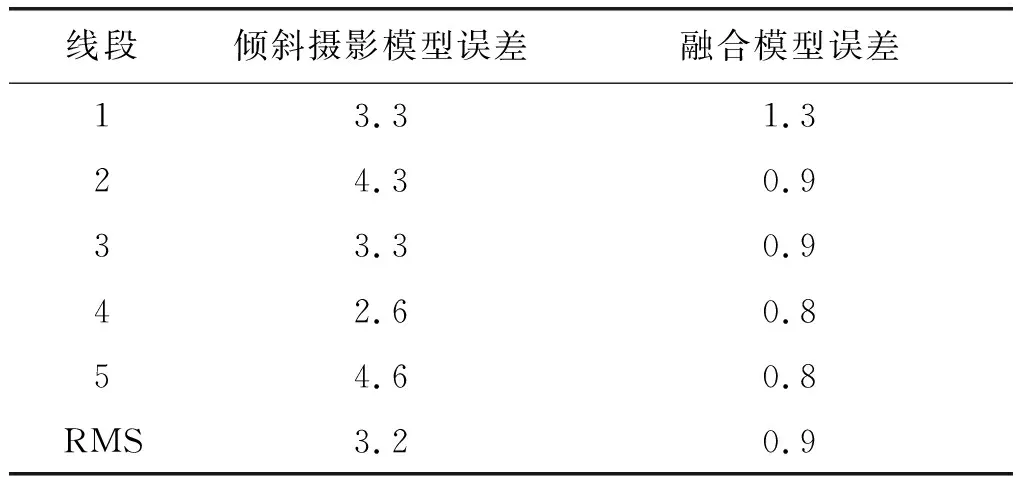
表3 倾斜摄影模型与融合模型线误差/cm
由表2-表3可知,融合后模型在点位精度和线精度上均高于倾斜摄影模型,并且融合后模型在控制的平面精度优于高程精度,屋顶的精度相对低于模型整体精度。
4 结 语
本文在坐标转换和配准统一点云空间基准的基础上,利用LNVD-DBSCAN聚类算法分割无人机影像点云的屋顶面与非屋顶面;通过半径滤波重构点云,利用NURBS曲面重构搭建建筑物模型。结果表明:融合模型较倾斜摄影模型精度更高,细部结构更完整。NURBS曲面重构的质量影响着建筑物建模精度,如何优化NURBS曲面还有待今后进一步研究。