基于HL-2M 装置的等离子体可见光成像诊断系统的研制
2022-09-29李宜轩杨宗谕朱晓博
李宜轩,夏 凡,刘 亮,杨宗谕,马 瑞,潘 卫,孙 江,朱晓博
(核工业西南物理研究院, 成都 610041)
0 引言
等离子体诊断是根据对等离子体物理过程的了解,采用相应的方法和技术来测量等离子体参量的科学技术。等离子体可见光成像诊断系统由于其灵敏度高,使用方便,可视性强等优点,近年来广泛应用于托卡马克等离子体物理过程的测量[1]。其功能主要是用于分辨等离子体位置以及实时监测和保护真空室内的面向等离子体组件(PFCs)[2-3]。等离子体位形平衡重建的结果也可以利用可见光成像图片进行校核。对一些特殊等离子体区域(如X点)周围的传输特性的研究[4-5]也有一定的帮助。此外,一些小结构例如H模放电期间的边缘局部模(ELM)细丝和边缘湍流斑点,同样可以被等离子体可见光成像诊断系统精确识别[6-8]。
现有大多数等离子体可见光成像诊断系统都是基于托卡马克装置设计定制的专门系统,准确适配当前托卡马克放电物理实验的基本需求[9-11],但是不能够在放电过程中灵活调整系统软件参数,在不同的物理实验中,不具备一定应变性。同时在更换装置时,系统软件不能够完成及时布置,一定程度上影响了实验的效率,所以建设一套具有灵活调整系统参数并具有可移植性的等离子体可见光成像诊断系统,并在装置上得到验证是十分有必要的。
HL-2M是新建成的大型托卡马克装置,其设计参数:等离子体电流为2.5 MA,环形磁场为2.2 T,大半径为1.78 m,小半径为0.65 m,等离子放电持续时间为5 s[12]。在HL-2M初始放电以及调试期间,应用等离子体可见光成像系统监视等离子体的启动、维持和破裂,以及等离子体-壁相互作用是很有必要的[13-14]。基于HL-2M装置的实验平台设计的可等离子体见光成像诊断系统,其光学成像部分提供了两个视角,一个视角沿切向观察等离子体,另一个视角从装置上部俯视等离子体——观察等离子体的环向对称性与偏滤器位形放电[15]。其图像采集软件在HL-2M初始等离子体放电期间,可以按时启动,实时采集图像,准确全面的反映出等离子体放电过程的真实情况,为HL-2M初始等离子体放电提供了可靠的数据支持。同时由于其可炮间调节系统配置参数,可以适应HL-2M初始放电的极大多数复杂情况。
本文第二部分介绍了系统的硬件设计思路以及实现装置成像诊断的技术方法,第三部分介绍了系统的软件的设计思路,包括了系统的色彩校准表现与软件参数配置功能,第四部分介绍了在HL-2M初始等离子体放电中的应用与实验结果。
1 系统硬件部分
系统的硬件组成部分包括了,光学器件的镜头与传像光纤束,相机、传感器与装置本地服务器等控制组件,大屏幕及投影仪等实验辅助设备,以及数据与信号的通讯与传输设备。系统的完整工作流程如图1所示,在HL-2M等离子体放电实验中,由光学镜头所诊断的图像,从HL-2M装置内部通过光学传导系统(传像光纤束、中继镜头)传至相机内部,再由相机内存传输至本地主机中,收集到的诊断数据,可以同时存至数据库中和播放在控制中心的显示大屏上。

图1 可见光图像诊断系统结构图
1.1 镜头与传像光纤束
切向与广角的成像诊断都是通过石英窗观察装置内部的等离子体。对于前端的镜头,切向与广角成像诊断因为视场的原因使用不同的镜头。切向成像诊断使用焦距为8.5 mm的镜头,可提供56.8°的视野和较大的光圈,安装在#4中平面上的切向窗口外侧,并通过3.5 m长的传像光纤束将像传输到CMOS相机;广角成像诊断使用了超广角镜头,焦距为5 mm,通过#5扇区的顶部窗口俯视等离子体。并通过6 m长的传像光纤束将其传输到CMOS相机。
为了避免等离子体辐射(X射线和伽马射线)和磁场变化对相机的影响,在诊断中使用了相干成像纤维束。传像光纤束广泛应用在磁约束聚变实验[16-17]和其它高辐射环境中,因其材质的特点,可以将图像从未受保护的物镜传输到辐射屏蔽相机,保证了诊断图像能够传至相机内且相机能够识别,须通过继电器透镜进行成像,所以传像光纤束末端设有中继镜头。采用双边远心镜头作为中继镜头,在高通量(NA为0.14)和高分辨率方面都有着很好的效果。镜头的放大倍率为1及其匹配的传感器格式为 2/3"。因此,它可以将中间直径为11 mm的有效区域从光纤束传至CMOS相机内。
系统的光学模块结构图,如图2所示,切向与广角系统的光学感光仪器诊断到装置内部数据,从传像光纤数排除干扰,传至装置外的中继镜头内,再由中继镜头将图像传至COMS相机中。整个流程为可见光成像诊断系统的一个光学诊断周期。

图2 系统光学模块结构图
1.2 相机与传感器
等离子体可见光系统的相机(Lumenera Lt425C)用于为等离子体放电期间提供高清图像。它基于具有1英寸光学格式的CMOS传感器,可提供2 048×2 048的全幅分辨率和5.5 μm的像素大小。峰值颜色的量子效率为43%。在全幅分辨率下,可以达到每秒90帧的速度记录,同时具有感兴趣区域(ROI)和像素合并(2×2 或 4×4)选项可提供更高的帧速率。
在HL-2M初始等离子体放电实验中为了匹配光学格式(直径为11 mm的有效区域),主要选择2 000×2 000的ROI作为采集模式。4×4像素融合模式可用于诊断等离子体击穿和启动放电,采集频率一般是360 Hz。相机具有接收触发模式,可以收到高电平信号执行相应操作。相机由装置本地服务器控制,图像捕获由外部触发程序直接发送至相机内,相机执行采集模式。在等离子体放电期间尝试使用1 800×1 800分辨率(帧率99 fps)和全幅分辨率2 048×2 048(帧率90 fps)的两种采集模式,都取得了良好的效果。

图3 1 800与2 048分辨率采集图像效果图对比(左图为1 800×1 800右图为2 048×2 048)
1.3 大屏幕和投影仪
为在等离子体放电实验中方便读取图像数据的需要, 使用投影仪将等离子体放电过程的图片回放显示在中央大屏幕上,同时屏幕显示的相机接收区域可以调整。由于需要同步的时效性,控制室的投影仪采用直接连接装置本地服务器,直接播放本地服务器内存中的照片,实现最快速度的回放功能。切向与广角系统分别设置有一个大屏,且在放电结束后,循环播放两套系统的诊断数据。
从镜头至大屏幕为本系统的主体部分,本系统的一个重要作用是及时提供可见光成像诊断数据提供至控制中心,以作为HL-2M装置等离子体放电的有力依据,以及炮间分析的主要参考,其中装置外大屏与投影仪对等离子体放电控制的作用十分重要。
1.4 数据与信号通讯设备
系统的软件触发是由消息服务器所发出的,消息服务器是使用的是EPICS(实验物理平台),EPICS服务是通过IOC数据库中的Record并通过CA协议发布到同一网络中,成为能够被 CA 客户端访问的过程变量(PV,process variable),通过接收PV值来改变程序的进度[18]。在一个服务器上建立一个离子体可见光成像诊断系统的IOC,并创建相关的控制参数PV,为确保实验的安全以及系统工作的正常,等离子体可见光成像诊断系统所配置的PV有nextshot PV(下一炮号)与countdown PV(倒计时)两个信号。当系统软件监听到nextshot PV变化的时候,开始监听countdown PV,当监听到countdown PV的值变化至0时软件系统准备完毕,进入等待硬触发阶段。
系统的硬触发的接收端是COMS相机,发送端则是HL-2M中央时序系统发出,在HL-2M等离子体放电的前1 s,等离子体中央时序系统将5 V高电平电信号发送至COMS相机,触发相机工作,完成数据的诊断与采集。如图4所示,为系统信号工作流程图,只有当系统接收到两个nextshot与countdown的PV与5 V高电平触发信号时,系统才可以正常工作。

图4 可见光成像诊断系统信号工作流程
系统的数据传输模块是通过以太网从本地服务器传输至远程数据库中,在每一炮放电结束时,不需要人为操作,程序将通过nextshot PV自动获取当前炮号的实验信息,将采集结果的图像从本地服务器,通过光纤传至远程文件服务器,以实现数据的保存与后续处理。文件传输具有统一的数据接口,可以在每次实验放电结束几秒内完成实验数据的远程自动传输,并将数据分类至规定的文件夹内,以便后续读取。
2 系统软件部分
系统的软件部分是可见光成像诊断系统的控制模块,该模块具有信号处理,图像处理,图像回放,图像存储等功能,系统软件部分的设计提供了一个较为开放的思路,可以在实验炮间到获取下一炮号之前随时更改软件的控制参数,同时作为软件系统,可以在不更换相机的前提下,适应多种装置,可以达到预期的效果。
2.1 图像处理模块
本系统的图像处理部分是基于Lumenera Cameras原生API 以及OpenCV库的图像处理程序共同完成的。包含了图像的采集,处理和播放。通过OpenCV创建MemDC显示对象与MemBitmap位图对象,两个对象的功能分别是绘制图像和显示图像。HL-2M初始等离子体放电实验中由光学设备将诊断图像传至COMS相机上,图像处理模块通过COMS相机获得的采集数据返回至本地服务器的内存中,通过操作内存将保存到内存中的照片在MemBitmap位图对象上进行绘制并保存,并通过MemDC对象进行回放显示,最后再进行位图MemBitmap的清理。
图像处理模块的工作开始的标志是收到该模块的开始信号,当COMS相机写入本地内存服务器的时候,系统软件会主动发送指令启动图像处理模块进行工作,图像的绘制和保存显示是同时进行的,都在装置本地服务器内完成,而在采集结束时,会收到处理模块的结束指令,图像处理模块进行位图的清理但是显示对象依旧保留,当收到下一次等离子体放电信号时,显示对象进行清理,等待执行下一轮的系统运行。
2.2 参数调节功能
由于初始等离子体放电实验需求,本系统设计可以根据具体需要设定图像拍摄的默认参数,如表1所示。考虑到曝光时间、增益等其他基础参数在放电实验中需要经常修改,本系统加入配置参数调节功能,在两炮放电间隔,可以通过远程接口,修改装置本地服务器相机的软件配置参数,并在下一次放电中起到有效的作用。该功能在多次放电中起到了良好的效果,可以使本系统适应多种复杂的放电情况与多种实验情况的要求。

表1 可见光图像采集系统可配置参数列表参数类型
软件的配置参数修改时间是在收到nextshot PV之前可以随时进行更改,如果没有进行更改,软件的图像配置参数沿用上一次放电实验中的配置信息,如果在nextshot PV之后修改,则改为修改的下一次放电序号的配置信息。参数配置功能为单独一个线程,不受其他线程的影响,可以进行随时更改,不会造成系统的故障。
用户配置参数时通过远程服务器将数据写入数据库,并通过网络协议发送消息至系统软件,然后系统软件通过接口获取数据库中的参数信息,远程服务器与系统软件关于配置信息的结构如图5所示。同时为了更好的配合HL-2M装置开展物理实验,每一次放电序号的软件参数都对应保存至数据库中,在重复实验中,本系统支持导入指定放电序号的配置参数,不需要人为记录与手动导入,提高了实验的效率与准确性。当软件系统第一次启动时,没有配置参数,则本系统针对此提供了HL-2M装置的默认图像采集配置,广角与切向的默认配置参数各有一套,分别适应对应的系统。
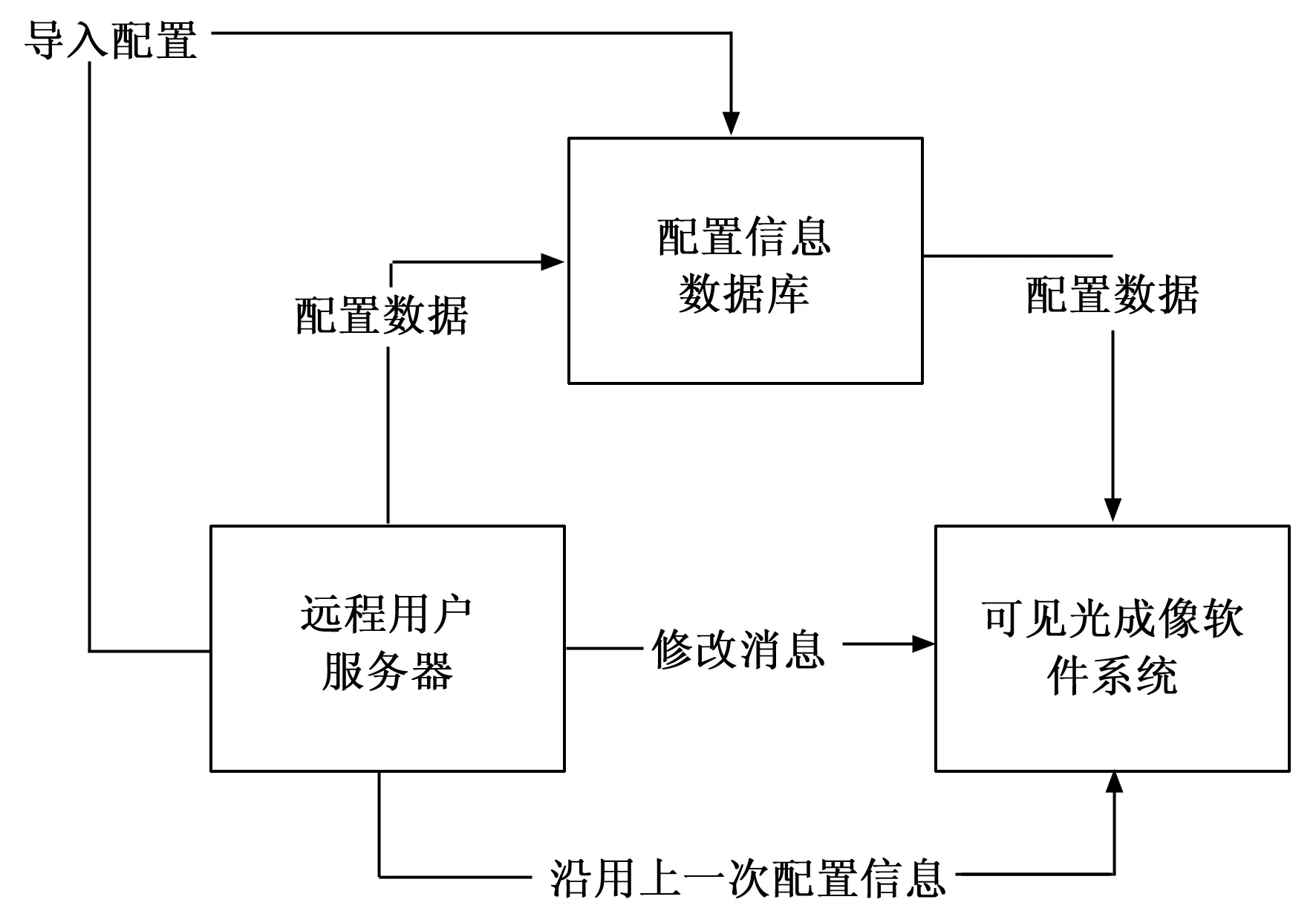
图5 参数配置模块结构关系
2.3 双软件结构布置
本系统采用的是切向和广角双诊断布局,由于硬件位置较远,分别在每套设备上布置一套软件系统,进而实现分别控制切向相机与广角相机的作用。由于两套系统软件单独控制,可以根据需要,分别改变不同的曝光时间以及色彩增益强度的参数,在一些实验条件上,也可以选择性关闭其中一个方向的采集系统,以作为保护。同时,为了保证系统采集的时间同步性,需要接收相同时间的软硬触发信号,为防止信号间的冲突性,分别接收两套不同的软硬触发信号,两套系统分别设有不同的信号服务器,但是共享共同的远程数据库。两个系统软件为相同的,仅在未配置参数时,默认参数分别对切向与广角等离子体可见光成像诊断系统做了适配。
2.4 系统工作流程
考虑到实验的情况以及有可能出现的信号与网络方面的不确定性,系统的工作流程分为正常的工作流程与异常的工作流程,在信号异常或配置未获取到的情况,本系统依然可以进行装置内等离子体可见光的诊断与采集,保证实验的有序进行。
2.4.1 系统的正常工作流程
开启系统软件并将系统的硬件通电,系统的工作流程流程:
1)当系统打开并运行时, 系统进入一个无限持续等待信号发送的状态与等待参数配置信号,当监听到nextshot PV放电序号变化的消息,进入等待倒计时countdown PV信号的状态;
2)当收到倒计时countdown PV信号的时候,系统开始进入倒计时,直到countdown PV的值为0时系统软件就绪,开始等待相机触发信号。
3)当系统收到TTL的高电平信号, 系统相机进行装置可见光图像诊断采集,并将图像数据从相机传至主机内存中。
4)图像采集结束之后,系统整理采集到的图像,保存到永久存储介质上并通过GetNetParentDir函数上传至远程储存库对应文件夹。
5)清除系统的位图对象内存,系统重新进入等待信号状态,同时回放采集的装置放电数据。系统正常工作流程示意图如图6所示。

图6 软件实现流程图
2.4.2 系统异常工作
系统异常工作的情况在实验期间考虑到两种:1)读取配置的数据或者接口出现问题或者人为失误启动系统软件但没有配置、导入系统参数;2)由于EPICS平台导致的信号软触发机制出现故障。
第一种系统进入的异常1运行,当系统启动没有从下一次放电序号读到系统的配置参数时,程序将执行切换至默认参数模式,在获取不到参数的时候,切向与广角都具备一套默认参数配置,可以适应HL-2M初始等离子体放电以及调试实验的需求,能在数据库异常的情况下,实现系统的继续工作。
第二种情况,在没收到消息信号的时候,系统没有办法获取到炮号,对系统的影响是不能有效进行数据的保存,放电实验结束时将拍摄采集到的照片,保存至本地与远程的临时文件夹内,如果不及时导出,也会造成覆盖问题。
系统异常工作方式,解决了客观与人为因素对系统造成的影响,在系统异常运行期间,也能完成在HL-2M实验放电所需的装置内部的可见光诊断与采集的功能。
2.5 多线程技术
为了保证系统的运行精确稳定,采用多线程来开发,各线程并行运行且使用相同的地址空间,共享进程中的数据,本系统使用VC++作为开发工具[19-21]。
在MFC开发中,单一的独立进程包含了界面线程和工作线程两个部分,界面线程有系统消息循环,用来处理用户硬件等相关的系统消息,工作线程则处理与消息无关的工作。线程间的处理都是各自独立的,本系统的界面线程用来响应用户界面操作、 硬件系统的初始化、启动和系统参数配置等相关工作。3个工作线程随系统界面线程同时启动, 这3个工作线程分别是:
1)图像采集和图像本地、远程保存线程;
2)等离子体放电中图像回放线程;
3)系统参数配置设置和读取修改线程。
系统的所有工作线程都需要对位图对象和显示对象进行操作,在系统同一个时刻只有单一工作线程单独占用位图对象和显示对象的资源, 软件系统对这些工作线程进行同步协调。
除主线程外,用CreateThread、 AfxBeginThread函数创建不同优先级的线程,各线程通过使用CEvent控件对象的状态来实现线程之间的通信。本文采用了4个Cevent控件对象作为线程之间的通讯信号量,来同步通讯这4个线程:
1) Time_CCD, 当此对象事件开始时, 系统进入配置系统软件参数状态;
2) Time_Grab, 当此对象事件发生时, 系统开始正式进入采集运行,采集诊断的数据状态;
3) Time_Put, 当此对象事件发生时, 系统开始按照采集的时间先后回放有效的图像, 得到放电的动态效果, 便于直观地了解实验过程中等离子体的演化过程;并通过接口将内存中的图像保存至本地服务器与远程服务器;
4) Time_Exit, 当此对象事件发生后, 结束所有工作线程, 最后结束界面线程,系统停止。
系统各线程与对象事件的执行顺序如图7所示,对象用矩形框表示, 消息用带箭头实线所表示,在系统正常运行的时候,依次启动参数配置线程、采集线程与最后的图像处理保存线程,在线程不工作时处于挂起监听信号状态,等待下一次信号触发。

图7 可见光图像诊断软件执行时序图
2.6 色彩校准技术
通常在装置内部所采集的可见光图像需要进行严格的色彩标定[22]。图像色彩通过引入白平衡机制,使用Lumenera中的WhiteBalanceU与WhiteBalanceV两个API进行颜色的校准比对,通过一次校准颜色之后,对RGB各色增益进行锁定,如果颜色不正常可以再次校准,每次校准均可以对增益进行锁定,用作之后的采集拍摄使用。该色彩校准技术在实验室环境光下进行了准确的标定,并通过实验测试可以良好还原实验中托卡马克装置内部的真实色彩情况,有助于对初始等离子体放电的分析。
本系统在实验中分别在色彩未进行标定与准确标定之后的进行了多组的测试。明显发现,在等离子体放电实验中,色彩标定校准之后的系统,在等离子爬升阶段与等离子体熄灭阶段装置内部的可见光诊断有了更真实的还原,图7为等离子体爬升阶段HL-2M装置内部等离子体可见光诊断图像,图8为等离子体熄灭阶段HL-2M装置内部等离子体可见光诊断图像,205炮为未进行色彩标定的RGB各色增益为默认的系统,500炮为进行实验室白平衡标准标定之后并锁定增益的系统。可以观察出,在装置内光照不是很强的时候,未标定造成的色彩偏差尤为明显。同样为了适应各种复杂实验环境,有的时候需要在装置内标定,所以,白平衡作为配置信息的一部分加入了软件配置参数中。

图8 HL-2M等离子放电205炮(左)500炮(右)第33 ms装置内可见光诊断图

图9 HL-2M等离子放电205炮(左)500炮(右)第55 ms装置内可见光诊断图
2.7 软件可移植性性优化
软件系统的设计具有很强的可移植性,可以通过更改系统软触发信号名称并修改保存远程数据库位置,实现系统的同步移植功能,并通过人为更改可调节参数,适应不同装置以及不同情况。在2021年HL-2A托卡马克等离子体物理实验上得到良好验证,软件系统移植至其他的装置上,可以正常采集诊断装置内等离子体可见光图像,并通过修改后的配置可以保存在所需远程数据库服务器与本地服务器上。
软件系统的开发时基于Lumenera相机开发,在不更换相机类型的情况下,有着良好的可移植性,为在其他装置上推广提供了新的参考方法。
3 实验结果和分析
等离子体可见光成像系统已经在HL-2M等离子体初始放电期间投入使用,通常以1 800×1 800的分辨率,频率为99 Hz采样。采样时间是在放电起始时刻至3 s时间停止。系统可以精确诊断出等离子体的位置与性状特征,并且因其采样频率较高,可以监测到等离子体放电的击穿、平顶与熄灭全过程现象。系统可以在放电期间实时监控等离子体真空室内的面向等离子体组件,保证放电的安全进行。
3.1 切向等离子体可见光成像诊断系统
图10显示了切向成像诊断在等离子体放电期间所采集的图像。系统在放电过程中选取的是1 800×1 800的分辨率,频率为99 Hz,像素合并为1,其余的软件配置参为默认值。

图10 HL-2M第726炮等离子体放电实验切向成像诊断的实验结果
采样数据图10和图11选取的是HL-2M 装置第726炮的等离子体放电数据,最大电流为55 kA,放电时长约为80 ms。图10的(A)和(B)图精确还原了等离子体放电以及气体击穿的原本颜色。对比图10图11,可以精确反映出气体在约20 ms被击穿,等离子体在97 ms左右熄灭。在图10(C)之后,可见光图像能够通过等离子边界发出的光识别等离子体边界。在图10中,可以观察出从等离子体边界发射的光,可见光图像产生清晰解析的边界边缘特征,如图10所示等离子体-壁相互作用会产生一些污染光。等离子体可见光的极化发射曲线与回收机制密切相关,被壁吸收的粒子(如氧和碳)在等离子体边界周围可以明显观察到。

图11 HL-2M第726炮等离子体放电实验等离子体电流、Hα辐射参数、环形磁场
切向可见光成像诊断系统的重点是观察等离子体的位置形状与边界特性,反应的是当前装置剖面的放电情况,以及等离子体与壁面相互作用的情况。切向作为放电控制的主要参考依据,在HL-2M初始等离子体放电中起到了关键性的作用。
3.2 广角等离子体可见光成像诊断系统
在HL-2M等离子体放电实验第726炮,系统配置参数选取的是1 800×1 800的分辨率,频率为99 Hz,像素合并为1,其余的软件配置参为默认值。广角等离子体可见光诊断依然可以精确测量出气体在约20 ms被击穿实现等离子体爬升段,等离子体在97 ms左右熄灭,在50~80 ms左右实现了一个拉长平顶段。如图11与图12,等离子体从击穿到熄灭的全过程,通过与磁诊断信号时间上的参照对比,可以观察到不同时间的HL-2M装置内部的气体的真实色彩与等离子体和等离子体与壁面作用时的亮度与颜色。

图12 HL-2M第726炮等离子体放电实验广角系统的实验结果
广角成像系统的优点是更加全面地反映出在等离子体放电过程中各时间点装置的整体特征,与切向的色彩表现基本相同(在系统主要配置参数相同时),并且与切向的时间与磁诊断信号进行对比,结果完全相同,验证了两套系统的信号系统时间上同步性。
4 结束语
经过HL-2M 托卡马克等离子体放电实验的多次证明,等离子体可见光成像系统可以全面直观地反应等离子体的放电情况,反应某一固定时刻等离子体放电的真实情况与装置内的真实颜色,能够实现等离子体诊断的目标并可以对采集图像进行分析,以及可以辅助其他的数据进行对比分析。由于其可视化的优点,更便于对装置的状态进行估算和预测,对后续实验的进展也有至关重要的作用,同时该系统具有参数可调节功能,可以根据实验需要,炮间调整设备的配置参数使之更有助于等离子体实验的精确测量。
本系统在HL-2M初始等离子体放电中取得了良好的效果,同时在移植至HL-2A实验装置上也能工作正常。本系统的设计为后续的大型托卡马克装置的等离子体诊断提供了一种简单通用的思路,为创建可通用等离子体可见光成像系统提供了一种新方法。
