基于RESID方法的液体火箭发动机实时故障诊断算法设计及半实物仿真验证
2022-09-29武小平郑孟伟孙纪国
薛 薇, 武小平, 张 箭, 郑孟伟, 孙纪国
(北京航天动力研究所,北京 100076)
0 引言
从液体火箭发动机健康监控技术诞生至今,世界主要航天国家都高度重视液体火箭发动机健康监控系统的设计和开发。事实上,健康监控系统现已成为改进现有和研制新型液体火箭发动机不可缺少的关键组成部分。为了保证发动机的正常、可靠、高效的运行。重型运载火箭对发动机的安全性和可靠性提出了新的要求,发展发动机故障诊断系统,保护运载火箭和载荷安全,避免由于发动机故障而引起的事故。目前,国内液体火箭发动机故障诊断系统的应用还处于起步阶段。
美国在液体火箭发动机故障诊断、健康管理等方面进行了投入巨大,并取得了显著的成效。由于美国美国在故障诊断、健康管理方面研究覆盖较为全面,具有代表性,对美国的相关故障诊断、健康管理系统可以按照功能分为以下4种类别:实时健康监控系统、试后分析系统、综合健康管理系统和可重复使用运载器集成健康管理系统。美国航天飞机主发动机(SSME)的健康监控系统代表着很高的技术水平,该系统可以对SSME进行整个寿命循环过程运行状态的监视与故障诊断[1-2]。早期SSME重点研究了“红线阈值检测与报警”系统[3],中期开始研制“SSME试验后自动化检测与诊断系统”[4],最后提出了集成系统健康管理的概念[5]。
目前,国内液体火箭发动机故障诊断技术的应用还处于起步阶段,随着计算机、人工智能、微电子等信息技术的飞速发展,基于复杂系统可靠性、安全性、经济性考虑,实时故障诊断技术受到越来越多的重视和应用,其中故障融合诊断方法是目前研究的一个热点[6-7]。国内理论研究方面进行了大量的研究,吴建军教授团队坚持数十年开展液体火箭发动机故障诊断研究[8-11],先后开展过基于模型的诊断、基于数据的诊断、基于人工智能的诊断等,取得了一系列的成就。北京航天动力研究所在此方面也开展了大量的理论研究及试验分析,针对稳态工作段采用了ARMA算法进行了故障诊断,并搭载了试验[12-13]。
本文针对我国大推力氢氧补燃发动机开展实时故障诊断算法设计,该发动机是未来我国最大推力高性能氢氧发动机,将承担我国载人登月等重大任务,开展发动机实时故障诊断技术研究,实现发动机全工况状态监测、故障诊断,发动机起动、主级、关机工况实时故障诊断等功能。目前我国在氢氧发动机故障诊断方面尚处于空白,开展液体火箭发动机故障诊断算法研究,为保证发动机在任何环境条件和任何工作状态下都可以稳定、可靠运行奠定基础。
1 发动机故障模型
1.1 发动机概述
本文研究的发动机是以液氢、液氧为推进剂,采用单富氢预燃室,燃气并联驱动氢氧涡轮泵的补燃动力循环方案,如图1所示,工作原理如下:

图1 发动机系统简图
液氢流动过程:从液氢储箱出来的液氢先经氢预压泵增压,再经高压泵增压,大部分流向预燃室燃烧;一小部分对推力室进行冷却,最后在推力室充分燃烧。
液氧流动过程:液氧经氧预压泵、氧高压泵增压后分为以下几路,一路驱动预压涡轮做功;另一路经过增压进入预燃室燃烧;第三路进入推力室与液氢混合后燃烧,由此产生推力。
燃气路工质流动过程:分别来自液氢副控阀和氧副控阀的推进剂进入预燃室混合、燃烧,产生高温、高压燃气,一部分燃气驱动氢高压涡轮做功,进而带动氢高压泵转动;另一部分燃气进入氧高压涡轮做功,进而带动氧高压泵转动;两路燃气最后都进入推力室进行补燃。
1.2 故障模型建立
液体火箭发动机是一种在高温、高压、强腐蚀性、高密度能量释放的极端物理条件下运行的复杂动力系统,部件参数强烈耦合,实际故障样本少、故障模式难以获取。由于发动机工作过程的复杂性,很难建立精确的动态数学模型,且所建立的模型通常是高阶的、非线性的。因此,数值模型方法作为一种重要手段在发动机设计中大量使用。本文分析了液体火箭发动机的系统结构,建立了方便注入故障的液体火箭发动机。以泵压式分级燃烧循环液氢液氧火箭发动机为研究对象,建立相关模型。故障添加一般可分为两种[14-15]:一种是在原有的模型基础上增加故障组件来满足故障仿真需求,此方法受限于发动机组件特性及建模的软件;另一种是发动机组件模型个数不变,在原有组件的数学表达式上增加一些系数以此来实现故障仿真。
本文根据液体火箭发动机中各典型部件的功能结构、性能特性及数学表达,并基于Matlab/Simulink仿真平台,建立了各典型部件模型。

图2 发动机动态模型建模思路
按照上述方式构建发动机非线性模型,该程序主要计算发动机动态特性。同时采用自主开发的非线性方程求解算法,提高了模型的实时性。该模型的故障输入接口可以同时添加多种故障因子。
2 RESID 算法设计及仿真
2.1 RESID算法原理
基于数据的故障诊断,该类型的算法研究主要集中在使用数理统计原理、信号处理、信号分析等方法对测量数据进行处理,再利用处理后结果进行故障诊断。
递归结构识别(RESID,recursive structure identification )算法是一种基于自 适应学习网络概念的非线性回归方法。它用简单的二元二次函数网络近似模式特征之间复杂的非线性关系。它以递归方式建立不同特征之间的相互关系。该算法检验给定特征集中所有特征的二次特征组合,并构建一个更高阶的非线性回归方程。回归方程作为判别函数,仅包含那些在最小二乘意义上最小化总误分类误差的特征。 为了构建网络,该算法提供训练和选择步骤。输入特征集分为训练、选择和评估子集。在训练阶段,为输入变量的所有成对组合确定二次拟合的系数。在选择过程中,拒绝在最小平方误差标准方面表现不佳的元素。其余元素成为下一阶段培训和选择步骤的输入。重复这些训练和选择步骤,直到性能测量没有显示任何进一步的改进。最后阶段即评估阶段,是确定网络整体性能的地方[19]。
递归结构辨识方法的流程如图3所示,其实质是通过不断的递归寻求最优的多项式表达式如(1)所示,每步递归训练所得的拟合均方误差会趋于一个最小值,当达到这个值时,我们认为拟合的结果比较好,用此时拟合模型得到的结果作为新的参数,作为新的特征值,加入到输入集中,用于实现下一步的递归拟合,不断地重复上述步骤,随着递归次数的增加,拟合的多项式阶次越高,拟合的准确性越高,当达到最大递归次数或者本次递归所有模型的均方误差均大于上一次递归结果模型的最小均方误差,则完成递归,认为这次的拟合是对数据最好的拟合结果。

图3 RESID 模型构建过程
y=a0+a1x1+a2x2+a3x12+a4x22+a5x1x2
(1)
其中:将二次项当作新的特征,上述的多项式拟合可以看作是线性回归的过程,可以用线性回归的方法求出最优的系数向量,求解过程如下:
设训练样本的集合为:
X={x1,x2,···,xn}
每一个样本xi有m个特性指标,即xi可由如下m维特性指标向量表示:
xi=(xi1,xi2,···,xim),i=1,2,···,n
其中:xij表示第i个样本的第j个特征指标,则n个样本的所有特性指标构成一个矩阵,记作
为了方便应用矩阵计算,将多元线性回归的截距扩充为特征值全为1的一个新的特征,记新的特征矩阵为Xb,系数向量θ,为则多元线性回归问题可以用以下矩阵公式描述:
(3)
其中:
目标函数为实际值与预测值的平方和,记作J,公式表示如下:
(4)
将上述公式表示为矩阵形式如下:
J=(y-Xbθ)T(y-Xbθ)
(5)
对θ求导可以推导出最优的系数向量θ的公式如下:
(6)
2.2 RESID算法在故障诊断上的应用
与传统的回归分析类似,RESID算法利用系统内的传感器到传感器的关系来建立输入-输出方程,以预测系统运行期间的传感器输出。然而,RESID方法与传统技术的不同之处在于,所开发的输入-输出模型的结构不是先验确定的。相反,该算法使用小的固定形式的构建块,这些构建块以递归的方式添加并连接到模型中,基于模型在预测输出参数方面的性能。这个模型训练过程需要数据来表示系统的名义行为。它的结果是一个单一的方程,该方程将RESID算法选择的输入参数与预测的输出参数联系起来。一旦方程建立,可以应用新的数据来估计输出参数。然后对误差进行阈值处理,进行故障检测。
RESID算法较好的适用于发动机起动、关机故障检测过程中模型的不准确、非线性问题和各种干扰等众多不确定性的影响。能够通过物理参数间的非线性函数关系揭示被检参数间的解析冗余,表征发动机正常启动状态下各参数间的变化关系。
RESID算法将启动过程中的各检测参数之间的关系回归成非线性函数,利用参数之间的协调性来检测系统故障。诊断流程如图4所示,其具体的诊断步骤如下:

图4 基于RESID模型的诊断流程
第一步,选择参数,选取相关度高的一组测量参数,这里推力室室压作为被预测对象。
第二步,数据预处理,建立RESID模型,输入为选定的一组个测量数据,输出为推力室室压。
第三步,根据预测均方估计误差最小原则,得到REID的模型,并由此计算出下一级迭代用的推力室室压。
第四步,将被测数据带入建好的RESID模型中,预测推力室室压。将预测值与实际测量数据相比较,得到残差数据。
第五步,将残差与门限值进行比较,判断是否发生故障。
3 半实物仿真平台测试
3.1 平台组成及工作方式
半实物仿真系统主要由实物产品、模拟系统和故障注入模块三部分构成,半实物仿真平台架构如图5所示。其中实物产品主要由故障诊断器、发动机控制器、执行机构、电点火系统、各类传感器的变送器等构成。箭体控制器仿真机、发动机仿真机、各类信号模拟器(压力、温度、转速和振动信号)和配套电源模块是半实物仿真平台的模拟部分,故障注入设备用于产生422串口通讯故障、1553总线通讯故障、AD/DA转换故障、开关量DIO故障等故障模式。
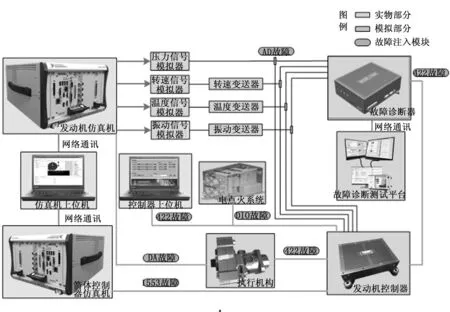
图5 半实物仿真平台架构
这里重点介绍一个发动机仿真机的架构情况,发动机仿真机采用C/S架构,由HiGale实时仿真软件、机箱、功能板卡、工作站等组成。实时运行发动机控制器模型,通过IO信号可将外部设备加入到实时仿真闭环,或进行设备的接口测试。上位机运行Windows操作系统,下位机(即实时仿真机)运行实时操作系统。上位机软件部分具有MATLAB/Simulink软件,提供控制器模型开发环境,且与HiGale软件无缝连接,具有一键自动化代码生成/下载和友好的试验/调试软件环境,具备仿真实验项目的管理等功能。
平台的工作原理:首先,在主工作站中建立故障诊断仿真模型,通过主工作站仿真软件下载到实时仿真机。其次,发动机仿真机计算出发动机工作过程的各项参数,经变送器转换后产生相应输出信号,并反馈至故障诊断器。最后,故障诊断器接收到信号后进行发动机故障诊断,并发出故障报警信号,同时通知箭体控制器。
通过开展发动机实时故障诊断系统半实物仿真试验,对实时故障诊系统进行了综合试验验证。考核了故障诊断系统在实际工作中的诊断算法运算能力、采集速度、通讯等性能,故障诊断算法诊断性能,以及整个实时故障诊断系统的有效性。构建的发动机实时故障诊断系统半实物仿真试验实物如图6所示。

图6 发动机实时故障诊断系统半实物仿真试验实物图
3.2 仿真分析
对RESID故障诊断算法进行了试验。试验过程为:由发动机仿真机运行大推力氢氧补燃火箭发动机故障模型,计算出发动机工作过程的各项参数,模拟真实发动机工作状态,输出发动机在不同稳态工况下的观测数据并进行故障模拟,故障诊断器接收到测量数据后进行发动状态判断、故障诊断及预测等,并将计算结果通过422和1553B通讯方式分别与控制器和箭体控制器仿真机通讯,告知二者发动机当前状况。
试验结果:
1)当发动机模型无故障时,输出正常稳态工作数据,诊断结果如图7所示,诊断结果为全0的直线,并且输出的故障数量为0,符合测试要求。

图7 无故障模式下故障诊断算法诊断结果
2)更改发动机模型参数,设定发动机阀门开度系数在4 s时由1衰减为0.8,添加阀门开度异常故障。故障诊断结果如图8所示。

图8 阀门开度单次异常故障模式下故障诊断算法诊断结果
由图8可知,RESID故障诊断算法在4.005 s诊断出故障,诊断算法均能快速、准确的检测出故障,满足设计要求。随后,设定阀门开度多次故障,对诊断算法进行测试。
3)发动机阀门开度系数变化分别在4 s和6 s出发生两次异常,开度系数由1变为0.8,第一次异常在5 s处恢复。算法诊断结果如图9所示。其中RESID故障诊断算法分别在4.011 s和6.015 s处诊断出故障,通过以上试验测试,故障检测响应时间小于0.5秒,故障检测率100%,故障诊断速率快,准确度高,满足设计需求。
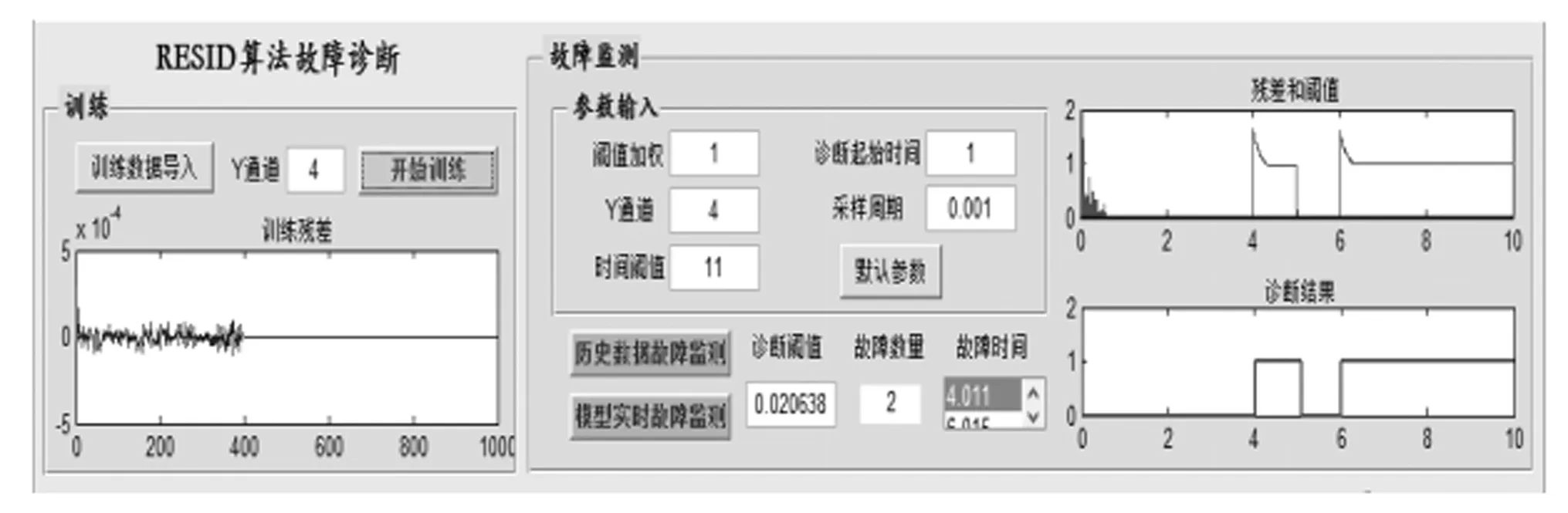
图9 阀门开度多次异常故障模式下故障诊断算法诊断结果
4 结束语
本项目针对大推力氢氧补燃发动机不仅完成了故障诊断算法设计、完成了故障诊断用模型的建立,而且通过半实物仿真平台试验验证,进行了全面的考核,能够方便快捷的验证故障诊断系统。该项研究过程中建立起一套适用于各型发动机故障诊断系统设计与验证的体系。最后,通过对大推力氢氧补燃发动机故障诊断系统的设计及试验验证,表明故障诊断系统故障诊断性能快速、准确,各组件设计均已达到预期指标,标志着氢氧发动机故障诊断系统设计关键技术攻关取得阶段性成果。
