VTS雷达及岸基溢油雷达组合选址优化
2022-09-28耿志鑫朱雪斌
黄 川 ,吕 靖 ,耿志鑫 ,朱雪斌
(1.交通运输部规划研究院,北京 100028;2.大连海事大学 交通运输工程学院,辽宁 大连 116026)
船舶交通管理系统(Vessel Traffic Service,VTS)作为中国进行水上交通治理的主要设备,其在保障水上交通安全和维持交通秩序等方面发挥重要作用。该系统主要由VTS中心、雷达站、闭路电视、甚高频通话、船舶自动识别系统等设备构成,中国已建立多个系统和VTS中心。但是航运业在助力中国经济飞速发展的同时也使船舶交通流量和风险水域数量持续增加,目前所建的VTS系统存在监管能力不足的问题,因此,有必要进行新一轮VTS系统选址建设。而VTS雷达站作为整个系统的核心组成部分,其位置选择对于整个系统监管能力和效率有着重要影响,因此,需要对VTS雷达站选址展开研究。
日常水上交通治理包括助力船舶安全通航、避免船舶事故以及监测船舶溢油等。根据《中华人民共和国海洋环境保护法》、《中华人民共和国防止船舶污染海洋环境管理条例》和《中华人民共和国船舶污染海洋环境应急防备和应急处置管理规定》(交通运输部令2011年第4号)的要求,海事主管机构应当根据防治船舶及其有关作业活动污染海洋环境的需要,会同海洋主管部门建立健全传播及其有关作业活动污染海洋环境的监测、监视机制,加强对传播及其有关作业活动污染海洋环境的监测、监视。主要的溢油监视手段有卫星遥感、航空遥感、CCTV监视、定点监视和雷达监测,各监测手段的优缺点如表1所示。

表1 溢油监测手段
目前,中国主要通过在岸基部署溢油雷达站和飞机巡逻实现水域溢油监测。考虑到船舶监测主要依靠岸基VTS雷达站实现,且中国海事部门已建立了比较完备的VTS系统网络,因此,多个地方海事主管机构从经济性和易操作性角度出发,采取在VTS中心加装溢油监视系统实现对水域的船舶和溢油监测管理[1],溢油监测系统主要是通过雷达对水域溢油进行监测。然而,传统的VTS系统并不具备水面溢油探测功能,往往只能作为溢油辅助监测设备[2],因此,为了能够达到更高效的溢油监测水平,减少环境污染及经济损失,有必要增设溢油监测雷达。在实际操作中,为了保障监测效果以及实现和VTS中心及VTS雷达的有效信息沟通,往往选择在VTS雷达站附近范围内进行选点架设岸基溢油雷达。由此,本文对VTS雷达及岸基溢油雷达组合选址进行研究。
国外对于VTS系统的研究主要从VTS系统和VTS操作员两个方面展开。在VTS 系统研究方面,主要包括系统建设必要性及经济性分析[3-5]、基于VTS系统开发相关系统[6]以及利用船舶自动识别系统(Automobile Identification System,AIS)数据基于深度学习[7]进行船舶避碰分析和轨迹预测等;在VTS操作员研究方面,主要是针对操作员日常工作内容[8]、绩效评估[9]和疲劳因素[10]进行分析;在VTS雷达站选址方面的研究相对较少,国内对于VTS雷达站选址的研究主要有文献[11-16],其对比如表2所示。由表2可见,对于VTS雷达站选址的研究大部分以单目标模型和集合覆盖为主,且针对VTS系统自身因素考虑较多,求解算法主要以启发式算法为主。而关于溢油问题的研究主要包括溢油应急物资调度优化[17-20]及溢油雷达监测[21-22]等,关于岸基溢油雷达站选址的研究相对较少。
综上可以看出,有学者针对VTS雷达站选址做出了相关研究成果,而关于VTS雷达和溢油雷达组合优化选址研究则相对较少。由表2可见,关于雷达站选址模型以集合覆盖居多。考虑到两种雷达站的建设支出都属于政府财政预算范畴,建设数量存在限制,故引入最大覆盖模型进行模型修正,同时考虑环境中存在的障碍物遮挡和雷达传递衰减因素构建数学模型并求解。
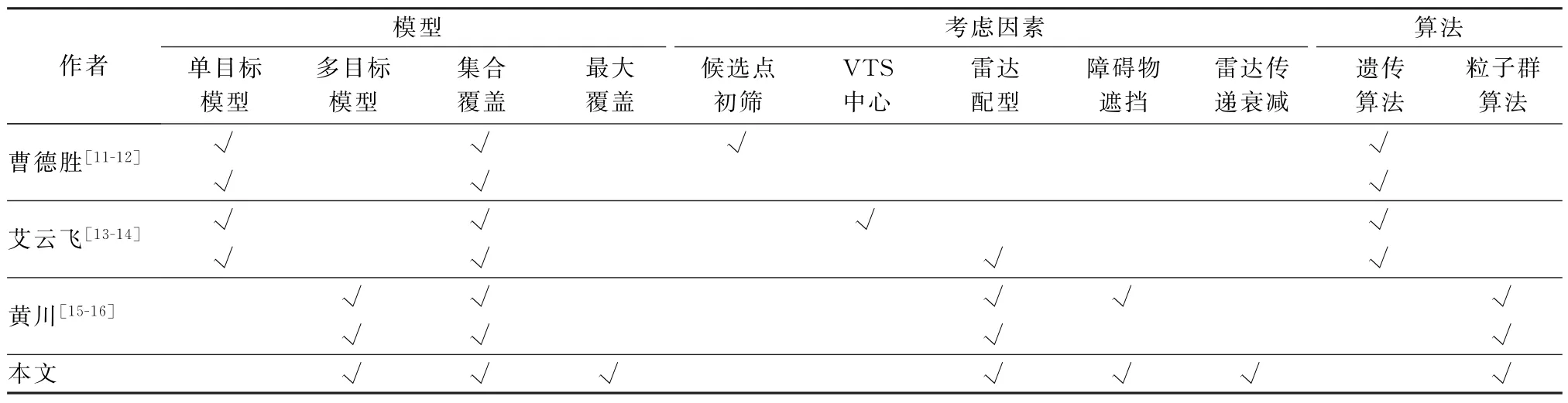
表2 VTS雷达站选址研究文献
1 问题描述及模型架构
1.1 问题描述
在用雷达无论是溢油监测雷达还是VTS雷达,由于带宽限制均存在最小和最大作用距离,即存在盲区和最大作用距离[23],故当水域在雷达的有效作用距离内时,即认为该水域能被溢油监测雷达或VTS雷达有效监测。溢油雷达主要有合成孔径雷达(Synthetic Aperture Radar,SAR)和侧视机载雷达(Side-looking Airborne Radar,SLAR)[23],两种雷达均依靠发射电磁波及吸收反射波实现对于物体的监控,而电磁波由于自身特性不可避免地存在传播衰减现象,即电磁波强度在介质中会随着距离增大而逐渐减小。但是溢油雷达的飞速发展将微波探测波段扩大到光学波段,在获得更高分辨率的同时也减小了衰减幅度[24]。另外,雷达在传播过程中还会遇到山林等障碍物,这些障碍物虽然不可能完全阻碍电磁波传递,但也会在一定程度上影响电磁波强度。因此,本文主要研究考虑传播衰减及存在障碍物的情况下如何进行VTS雷达站及溢油雷达组合选址,并在此过程中针对不同水域的监测需求予以考虑。选址示意图如图1所示。
在图1中存在VTS雷达站候选点1、3、4,A~H为所需监测水域,不同水域对于溢油和船舶监测存在不同的监测需求。现需要在VTS雷达站1、3、4建站点加装若干数量溢油雷达,为了保障两种雷达组合工作效率及扩大雷达有效监测区域,溢油雷达既可以建在VTS雷达站选点处,也可以建在其周边半径r范围内。假设在3个雷达站中选择1个雷达站加装1个溢油雷达,考虑障碍物遮挡和雷达传递衰减两种情况,图1中选择VTS雷达站1周边加装溢油雷达2。
1.2 雷达衰减测算
对于VTS雷达和溢油雷达而言,其所发射的电磁波无论超长波、长波、中波、短波还是超短波,当其在空气中传递时遇到大气、云、降水粒子等均会造成衰减。本文引入衰减函数进行雷达衰减测度,以雷达对水域的覆盖率测算两种雷达对于水域的监管效果,水域被覆盖率区间从传统的0~1二元区间变为[0,1]区间,常用的衰减函数主要有分段函数、高斯函数和指数函数等[25],函数图如图2 所示,针对实际建站环境的差异采取不同类型函数进行研究。
如图3所示,当在VTS雷达站1周边加装溢油雷达2时,雷达1和雷达2对于周边水域A的组合覆盖的覆盖率采用下式计算,确保对不同水域覆盖需求实现不同种类覆盖。
1.3 障碍物遮挡计算
本节进一步讨论建站环境中存在障碍物情况下两种雷达对水域覆盖率的变化情况及计算方法。当水域不在两个雷达作用范围内时,可以认为两种雷达对水域的覆盖率为0;当水域在两个雷达作用范围内且无遮挡形成时,基于两者距离直接采用衰减函数进行覆盖率计算;当水域在两个雷达作用范围内且存在遮挡时,因为在实际环境中,山林等障碍物不可能对雷达的电磁波形成完全阻挡,所以本文赋予每个障碍物一个穿透率。此时,水域覆盖率为衰减函数覆盖率与障碍物穿透率的结果之积,在实际环境中山脉和森林的穿透率往往不同。
在此基础上提出障碍物对雷达电磁波是否形成遮挡的判断方法。图4(a)中存在山体障碍物(T-RSQ)、拟建雷达站(K)、水域8 以及雷达电磁波(MM),雷达站存在自身建站高度以及地理高程,水域8存在地理高程。当电磁波(MM)经过障碍物(T-RSQ)时,依据空间几何,首先判断直线MM与T-RSQ 的4个面——TSQ、TRQ、TRS 和RSQ 是否平行,继而判断是否产生交点X且需要判断交点X是否位于4个面范围内。如果产生交点且交点位于4个平面范围内,则认为遮挡形成,但是如果完全依靠这种方法进行障碍物遮挡判断会产生如图4(b)所示的判断谬误情况。在图4(b)中存在障碍物(P-MON),当产生交点Y且交点Y位于障碍物(P-MON)内部时,依据前述方法可以认为遮挡形成,但是由图4(b)可以直观地看出,在雷达站K和水域8之间并不存在障碍物,故采取向量内积方法将此种情况排除并用遮挡判断方法修正。此时,交点Y与水域8和雷达站K分别形成向量Y8和YK,当Y8·YK>0时,可以认为遮挡没有形成,否则形成。用图4(a)进行验证,向量X8·XK<0,形成遮挡。
1.4 模型构建
VTS建设及溢油雷达配置费用属于政府公共财务预算,且单个VTS建设费用较高,因此,在实际中,海事主管机构往往只能建设有限数量的基站。考虑到雷达是扇形搜索,故采用FLP(Facility Location Problems)中的最大覆盖模型和集合覆盖模型进行研究[26]。在模型构建时,本文将溢油雷达和VTS雷达同时进行组合优化选址,虽然是在VTS雷达周边范围内选址建设溢油雷达,但是两者在优化逻辑上并不存在顺序区别,即并不是先对VTS雷达进行最优选址,然后再进行溢油雷达最优选址。因此,并不适合构建双层模型。为了贴近实际建设需求,本文以多目标模型进行数学模型构建。
相关假设及参数说明:
(1)模型假设。
①需要覆盖的水域数量、水域面积及水域地理高程已知;
②VTS雷达候选点数量已知,溢油雷达候选点半径已知,各候选点高程已知;
③VTS雷达和溢油雷达所能配置雷达类型及雷达参数已知,建站高度已知;
④障碍物数量已知,各障碍物穿透率已知;
⑤逐渐覆盖函数公式已知。
(2)参数定义。
决策变量
yj——0-1变量,若VTS雷达站候选点j被选中,则yj=1;否则,yj=0
xh——0-1变量,若溢油雷达站候选点被选中,则xh=1;否则,xh=0
——0-1变量,若j雷达站候选点被选中且配置第k型号雷达,则否则
——0-1变量,若h溢油雷达候选点被选中且配置第n型号雷达,则否则,
模型参数
Ai为需要监管的水域,i=1,2,…,I。其中:Aij为需要被VTS雷达监管的水域,Aij=1,2,…,AiJ,对应的每个水域面积为sAij;Aih为需要被溢油雷达监管的水域,Aih=1,2,…,AiH,对应的每个水域面积为sAih,其中有一部分水域是同时需要被两种雷达监控。B为雷达站候选点,Bj为VTS雷达站候选点。其中,Bh为溢油雷达站候选点,h=1,2,…,H,选中建址的VTS雷达站候选点半径r范围即为溢油雷达候选点的选点范围。ξiBj和ξiBh为每个水域被VTS雷达和溢油雷达覆盖的次数,si为每个水域的水域面积,S为所有水域的总面积。CAij,Bj为VTS雷达覆盖率矩阵,表示VTS雷达站候选点Bj对水域Aij的覆盖率结果;CAih,Bh为溢油雷达覆盖率矩阵,表示溢油雷达站候选点Bh对水域Aih的覆盖率结果,两者均由逐渐覆盖函数f(D)和障碍物穿透率Og计算得出,具体运算逻辑如1.3和1.4节所示。D为所需覆盖水域与雷达站候选点的欧氏距离,f(·)为逐渐覆盖函数。Fg为建站环境中存在的障碍物,g=1,2,…,G,Og为对应障碍物的穿透率。Mj为VTS雷达站的固定建设成本,Mh为溢油雷达站的固定建设成本。Ek为VTS雷达站配置k型雷达的成本,k=1,2,…,K;En为溢油雷达站配置n型雷达的成本,n=1,2,…,N。为VTS雷达站候选点j在配置第k型号雷达时的监测概率为溢油雷达站候选点h在配置第n型号雷达时的监测概率。g h为0-1变量,因为溢油雷达是在VTS雷达站点周边范围内进行设置,所以当溢油雷达和VTS雷达部署在同一候选点时,溢油雷达监测情况可以通过VTS雷达站的相关设备传输至VTS中心,此时,g h=0,即不需要建设额外的溢油雷达站,溢油雷达站建设成本为0;当不在同一站点部署时,此时需要额外增加溢油雷达站建设成本,g h=1。
(3)模型构建。VTS 雷达站和溢油探测雷达站的总建设成本主要包括雷达站的固定建设成本和雷达配置成本。基于上述参数描述,相应的公式如下式所示。式(1)、(2)的唯一区别是判断系数g h,原因在模型参数中已描述,
此外,基于并联系统对水域的被覆盖率进行计算[15],逻辑如下:假设能够覆盖水域的雷达站有多个,则该水域能被有效监测的必要条件为至少一个雷达站能够对其有效监测。因此,两种雷达对应的水域覆盖率计算公式为:
基于上述计算,本文的双目标选址模型目标函数为:
目标函数式(6)表示整个雷达站建站总成本最小,第1部分为VTS雷达站建站成本,第2部分为VTS雷达配置成本,第3部分为溢油雷达站建站成本,第4部分为溢油雷达配置成本;式(7)表示监管水域面积覆盖率最大,第1部分为需要被VTS雷达站监测的水域面积覆盖率,第2部分为需要被溢油雷达站监测的水域面积覆盖率;约束条件式(8)、(9)表示在水域需要被VTS雷达或溢油雷达覆盖的情况下,该水域需要被对应雷达站覆盖1次及以上;式(10)表示在所有水域都被覆盖的情况下,溢油雷达和VTS雷达需要监测的水域面积总和要大于等于水域总面积,即满足有些水域需要同时被两种雷达覆盖;式(11)表示水域面积等式;式(12)、(13)表示每个选中的候选点只能配备1种雷达;式(14)为0-1变量约束。
2 算法介绍
启发式算法广泛用于类似的研究领域,主要包括受进化概念启发算法的进化算法[27]和基于群或基于种群的群智能优化算法[28],其中包括遗传算法、差分进化、粒子群优化、灰狼优化和布谷鸟搜索算法等。与进化算法相比,群智能算法在迭代过程中保留了关于搜索空间的信息,而进化算法丢弃了前几代的信息。另外,群体智能算法几乎没有需要调整的参数[29],因为群体智能算法已经被定期研究和开发。其中,粒子群算法因其优越的优化能力和易于实现而受到更广泛的关注[30]。然而,随着实际的多模态和高维优化问题变得越来越复杂,现有算法无法保证解决方案的多样性和效率。因此,本文采取多目标粒子群算法进行选址求解,并采用自适应混沌权重和粒子位置螺旋更新策略等措施增强算法局部搜索和全局寻优能力。
2.1 多目标粒子群算法关键步骤
(1)初始解编码方式。因为最终决策方案对于单个候选点只存在建与不建两种可能性,所以编码采用0~1编码方式。但是在生成初始可行解时,首先排除障碍物内候选点,然后随机生成VTS雷达选址方案,在有效半径范围内得到溢油雷达站候选点范围。在该范围内以0~1编码方式得到溢油雷达选址方案,两部分组成了算法初始的1个可行解,按此方法生成一定数量的可行解。
(2)自适应混沌权重。标准粒子群算法对于粒子的速度和位置变化公式中的权重采取赋定值的方式进行计算,为了追求算法对于局部和全局解的寻优能力以及算法的求解速度,考虑混沌图的随机性和遍历性特点,对速度和位置变换公式中的权重采用混沌自适应权重进行赋值,有助于提升算法性能[31-32]。权重ω的计算公式为:
式中:tt为当前迭代次数;xtt为tt代的随机数;A是常数,其中A=4;Tmax为最大迭代次数,ωmax和ωmin分别为0.8和0.3[32]。
(3)单点随机变异。通过生成随机数进行比较来决定是否执行变异。因为是数量约束下的选址优化问题,所以当执行变异时需要额外在可行解的其余位置执行相反变异,以确保满足总数量约束。
(4)粒子位置更新策略。标准粒子群算法的位置更新策略使得粒子总是朝之前代数的最佳位置移动,从而降低了在已知最优解周围搜索邻域的能力[33],因此,本文引入飞蛾火焰算法的螺旋捕焰方式进行粒子位置更新[34]。计算公式为:
2.2 多目标粒子群算法流程
针对本文模型,相应算法流程如下:
步骤1种群初始化。
初始粒子群按照前述方法得到,以本文模型中的两个目标函数为适应度函数进行适应度计算,具体公式为
故每个粒子的适应度函数均以矩阵形式存储并进行支配关系比较,即比较所有粒子的适应度函数值,当粒子A 的所有目标均优于粒子B,则称A 优于B,也称A 支配B,A 为非支配解,B为支配解。而本文模型的两个目标函数朝不同方向变化,为方便进行支配关系比较,将适应度函数变为
从而所有粒子的适应度函数都朝最小化方向进行,方便进行MATLAB 编程计算。最后,将初代非支配解进入外部存档集存档。
步骤2粒子位置、速度更新。
采用标准粒子群算法公式进行粒子速度的更新,采用式(17)、(18)进行粒子位置的更新。
步骤3适应度函数计算及非支配解集构建。
计算适应度值并进行支配关系比较,将得到的非支配解与外部存档集中的非支配解进行支配关系比较,合理剔除处于被支配地位的非支配解;进行个体极值和全局极值的更新。
步骤4变异操作。
对处于被支配地位的可行解执行单点变异操作。
步骤5终止条件。
粒子群算法到达最大迭代次数后停止,否则返回步骤2。
步骤6Pareto前沿最优结果选择。
统计外部存档集中每个非支配解的出现概率,定义一个出现概率值,以轮盘赌方法在高于该出现概率的非支配解集中随机选择一个作为最优解。
3 案例分析
以某省的VTS雷达站选址项目为研究对象,将其简化为本文所需算例,选址示意图如图5(a)所示。在整个建站环境中存在若干分段河流(见图5中红色曲线),同时存在山体障碍物D-ABC、PMON 和T-RSQ 以及森林障碍物IJKL-GHEF。将若干分段河流进行分段简化提取,最终选择25个水域,如图5(b)所示。为较清晰地显示所有水域,故在图中没有对所有水域的高度进行区分,25个水域的具体坐标、高程及水域面积如表3所示。
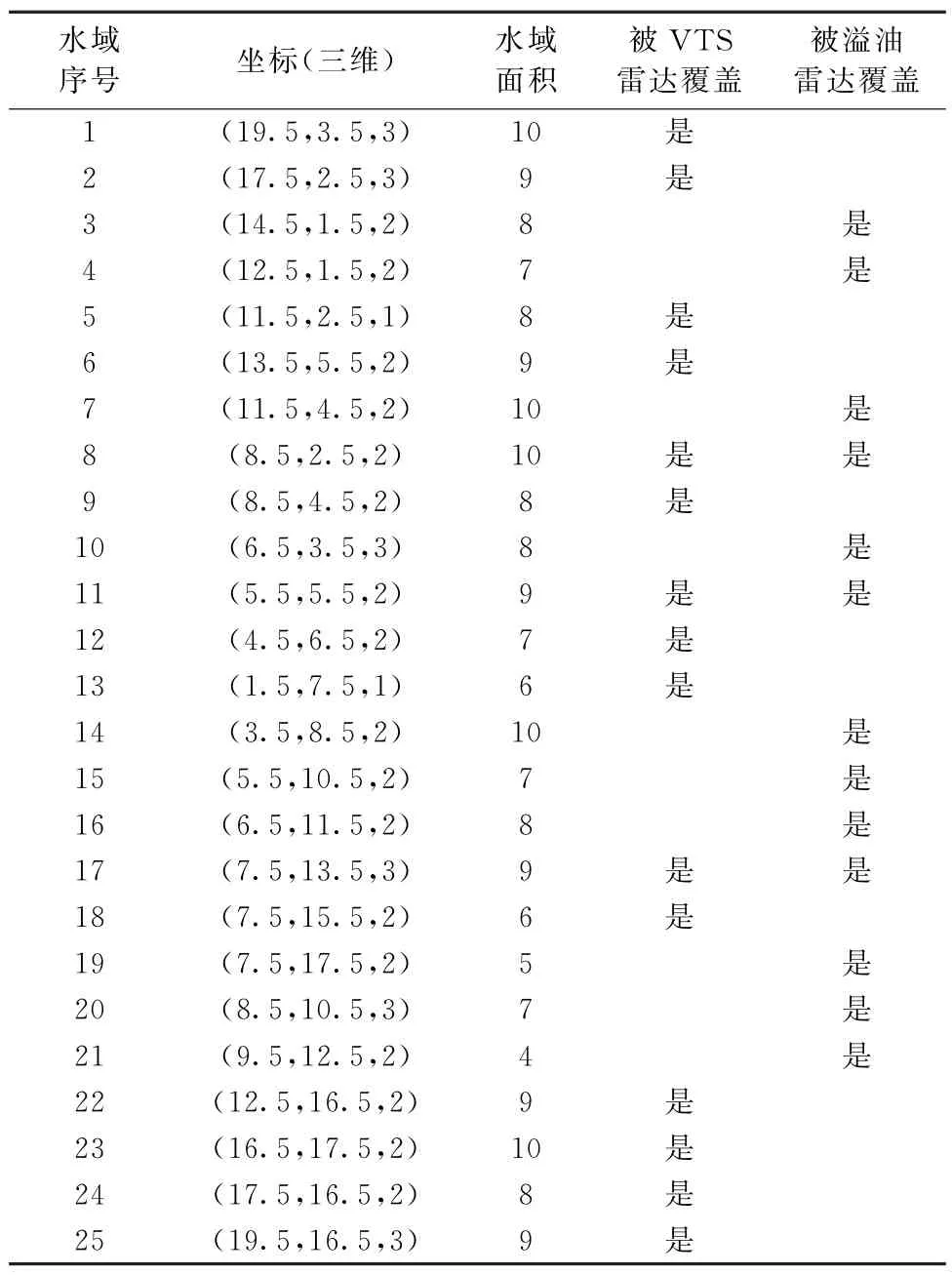
表3 水域坐标及覆盖需求
如1.3节所述,本案例采用障碍物穿透率方法进行障碍物遮挡效果测算,而一般山体障碍物的穿透率明显低于森林障碍物,本文假定各障碍物穿透率如表4所示。
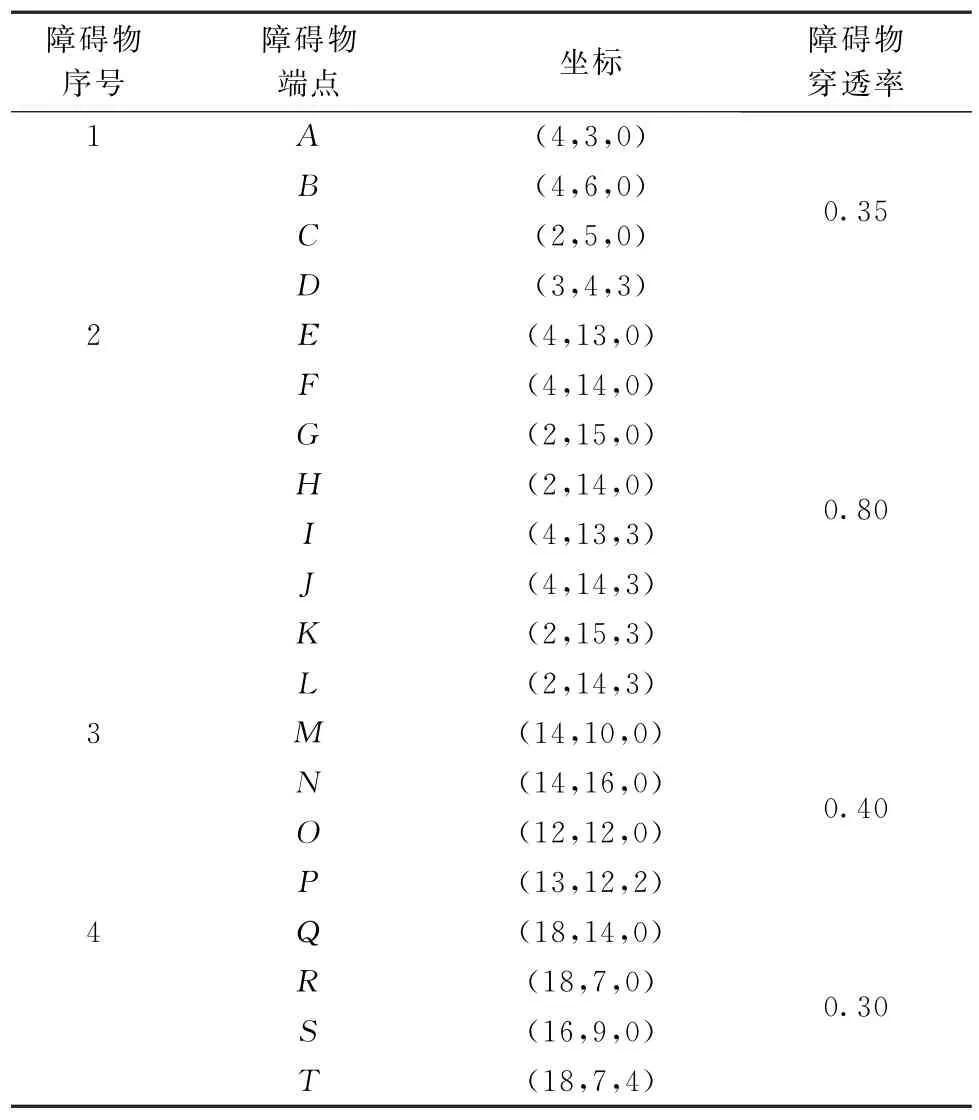
表4 环境障碍物及穿透率
本文的雷达站候选点范围为三维空间中任意整数点。地势的高程变化截面图如图6(a)所示(垂直于Y轴得到),因为高程值为持续变化状态,为计算方便和更贴近实际,将各点高程值变化为如图6(b)所示,故各建站候选点的实际高程值均可由此得到。另外,假定溢油雷达和VTS雷达的建站高度为1,当某点被选中建站时,该点的高程值计算为该点地理高程和建站高度之和,否则为该点地理高程。
考虑上述因素后,整个项目中VTS雷达站选址建站的选点范围为XYZ∈{(0,0)-(20,20),Z=各点高程值}的任意整数点,而溢油雷达的选点范围则为以VTS雷达建址点为中心的半径r范围内。如图7(a)所示,以xoy为平面进行研究,当VTS雷达选在坐标(3,3)建址且溢油雷达扩建半径为时,因为选址候选点须为整数点,所以溢油雷达候选站点为图中红色范围内候选点;又因为溢油雷达和VTS雷达可以建在同一站点,所以溢油雷达候选站点包括红色框中8个整数点及VTS雷达站候选点。在此情况下共计9个候选点,且当VTS雷达选择边缘候选点建站时,溢油雷达候选点范围需要进行边界约束,不能超越当前VTS雷达候选点边界,如图7(b)、图7(c)所示。当VTS雷达站在边缘角选址且半径为时,溢油雷达站候选点变为4个;当VTS雷达站在边缘边选址时,候选点变为6个;当扩建雷达站点在障碍物内部时应该予以排除,无法建站。
VTS雷达和溢油雷达参数设定如表5 所示。由于溢油雷达在监控过程中需要得到溢油面积等相关信息,往往所能覆盖的距离相对较远且要求监测可靠性高,故假定溢油雷达种类如表6所示。
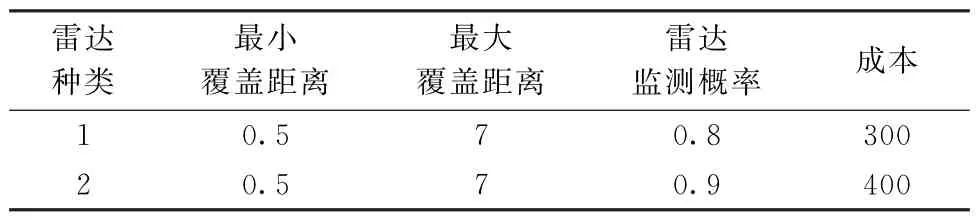
表5 VTS雷达种类

表6 溢油雷达种类
因为雷达的衰减与探测距离间呈现出exp函数变化趋势[35],所以采用图2(b)类衰减函数进行雷达无线电波衰减测算。然而,目前岸基溢油雷达站更多采用激光雷达进行溢油监控,衰减较少[36],因此,两者雷达衰减函数可表示为:
本文所需监管的水域数量为25个。其中,需要被VTS雷达站监管的水域数量为15个,需要被溢油雷达站监测的水域数量为13个。如果按照集合覆盖进行计算,最终结果很可能不符合经济性和合理性原则,因为两者建站数量都需要小于这个上限值。如果按照最大覆盖模型进行研究也无法确定两者建设数量下限。因此,本文将两种模型进行结合建模计算。经过程序反复试验,在VTS雷达站和溢油雷达建站为5和3的情况下有出现可行解,在低于这个数值时没有可行解出现,因为两者数量变化范围为[5,14]和[3,12],所以在此范围内随机生成可行解进行计算。在计算过程中,假定VTS雷达站建站成本为500,溢油雷达站建站成本为0和400,当两者选择同一站点计算时,溢油雷达站建站成本为0,否则为400。粒子群大小设置为100,迭代代数为100,粒子维度为882。其中,前441位为VTS雷达站选址方案,后441位为溢油雷达选址方案,变异概率为随机数变异,外部存档数量上限为50。为了降低程序计算量以及更好、更快地获得本文所需非支配解,对于不满足覆盖次数和面积覆盖需求的粒子施以[X+P,10-Z+P],P=108,从而让其一直处于被支配地位,降低进入非支配解集的概率。因为单次运行算法很难得到最终完全的Pareto前沿,为保证结果准确性以及尽可能贴近理想Pareto前沿,考虑到单次算法运行时间较长,本文最终决定将算法运行5次,将5次得到的所有非支配解进行支配关系比较,得到最终的Pareto前沿,如图8所示。
由图8可见,最终获得的Pareto 前沿较为平滑。统计最终Pareto前沿上每个非支配解在原迭代过程中在外部存档中出现的频率,设置一个频率出现阈值,在高于该阈值的非支配解中依据出现概率和轮盘赌规则随机选择最终的选址方案,在图8中用方框标出。根据最终最优解可得最后建站成本为13 900,覆盖率为1.55。此处覆盖率大于1的根本原因是,本文模型中将两种雷达的覆盖概率相加,所以覆盖率变化区间为[0,2],从结果合理性角度将结果进行归一化,得到覆盖率为:1.55/2=77.5%。最终两种雷达站建站方案分布及雷达配型如图9所示。
由图9 可见,最终的选址方案用相对较少的VTS雷达和溢油雷达建站数量实现了相对较高的覆盖水平,最终溢油雷达站的建站范围能够满足模型位置约束,即溢油雷达最终建址位置均在VTS雷达周围半径内,且最终两种雷达的位置分布能够满足所有水域的覆盖需求。进一步研究发现,最终建站的VTS雷达站和溢油雷达站数量并没有呈现出一对一的关系,即一部分VTS雷达站周边需要建设溢油雷达站,这主要是由周边水域的覆盖需求及水域空间位置分布导致的。另外,最终方案中没有出现溢油雷达和VTS雷达共建于一个站点的现象,而这可能是随机选择最终解导致的,如果在成本、覆盖率以及覆盖需求上做出相关约束,则共建一站的频率将会提高。最后,最终方案并没有针对VTS雷达及溢油雷达在雷达类型上呈现出偏好。
4 结语
本文以VTS雷达和溢油雷达为研究对象,针对VTS雷达及岸基溢油雷达组合选址优化问题进行研究,并考虑实际选址环境中存在的山脉、森林等障碍物遮挡及雷达传递衰减对雷达电磁波强度的影响,在三维空间中提出具体判断及计算方法,并构建了多目标选址模型,针对模型设计了自适应混沌多目标粒子群算法进行求解并用算例验证。但是在实际情况中远不止这些因素需要考虑,例如,海事主管机构对于两种监测需求的具体要求以及雷达与水域一对一覆盖可能导致的问题等。因此,在后续研究中还需进行优化改进以贴合实际建设需求。另外,本文算法也存在提升空间。