基于红外阵列传感器的火源定位方法
2022-09-27李向国梅志千朱灯林
王 洋, 李向国, 梅志千, 朱灯林
(河海大学机电工程学院, 江苏常州 213022)
随着经济不断发展, 大型空间建筑物的数目迅速增多。这类建筑空间结构复杂, 电气设施众多, 人口聚集, 潜在火灾危险性较大, 灭火难度也较高[1]。因此, 大型空间建筑在火灾早期的自救非常重要, 然而传统的灭火系统已然无法为其提供较高的保障, 开发一款可靠的大空间自动跟踪定位消防水炮系统就显得极为重要。
自动跟踪定位消防水炮系统是一类集火灾探测、火源定位、远距离自动灭火于一体的消防灭火系统[2-4]。近年来自动跟踪定位消防水炮系统迅速发展[5-10], 大量研究人员对其进行了多方面的深入研究, 取得了丰硕的成果。邬琳琳等[11]采用窄缝十字定位原理, 通过转动消防水炮进行全空间扫描, 使位于交叉的十字窄缝处的红外热释电传感器产生报警信号实现火源定位。这种定位方式操作简单, 但是耗时较长, 定位误差较大且无法定位火源中心。伴随着计算机技术与图像处理算法的不断进步, 基于视觉的火源定位技术逐渐成为自动消防水炮的研究热点。储海东等[12]利用红外图像处理算法, 对火灾所产生的典型特征进行检测, 并依据双目视觉定位原理实现火源定位。基于计算机视觉的火源定位精度较高, 可以有效定位大型空间建筑内的火源[13]。然而, 它很容易受到强光、其他物体的干扰, 导致错误识别, 而且数字化图像处理需要消耗大量的时间, 导致定位性能下降[14-15]。
针对现有的自动跟踪定位消防水炮系统存在定位时间长、定位精度低等问题, 本文提出了一种基于红外阵列传感器的火源快速定位方法。该方法在探测到火源的基础上, 采用红外热成像技术获取火源的红外图像, 然后在红外图像上利用图像重心算法计算火源重心坐标, 并根据火源重心与图像中心的偏差对消防水炮进行反馈控制, 实现火源精确高速定位。
1 火源定位方法设计
为了提高火源定位的速度和效率, 增加精确性, 减少定位误差, 本文设计了自动跟踪定位消防水炮系统, 其主要采用了MLX90640红外焦平面阵列传感器进行火源定位。
当自动跟踪定位消防水炮系统的火灾探测模块探测到火灾后, 系统开始自动定位火源。为了提高火源定位效率, 在定位之前先判断火源是否在MLX90640的视场内。通过MLX90640探测当前视场内的温度, 当最大温度值超过了所设的阈值, 就表明当前视场中存在火源。若火源不在当前视场内, 系统将启动自动扫描程序, 消防水炮按照设定的角度和方向进行转动, 直至火源出现在MLX90640的视场内。该系统自动获取火源的红外图像, 并利用图像重心算法计算出火源的重心坐标。
以红外图像的中心为原点建立坐标系, 设原点坐标为(x0, y0), 像素点的坐标为P(i, j), 对应的温度为Tij, 则火源重心在红外图像上的坐标(xc, yc)如下所示:

根据火源重心的坐标距离图像中心的偏差(Δx, Δy), 计算消防水炮需要转动的方向和角度。通过转动消防水炮, 使火源重心位于红外图像的中心, 从而实现火源的定位。
采用上述方法定位火源时, 首先需要明确消防水炮转动角度与红外图像像素值之间的对应关系。消防水炮转动角度与红外图像像素值的转换系数可通过以下标定算法来计算。
(1)计算火源重心在红外图像上的位置P(i0, j0);
(2)消防水炮水平方向转动一个角度γ0, 竖直方向转动一个角度δ0;
(3)计算火源重心在红外图像上的位置P(i1, j1);
(4)计算消防水炮转动角度(γ0, δ0)与红外图像像素值的转换系数, 如下所示:
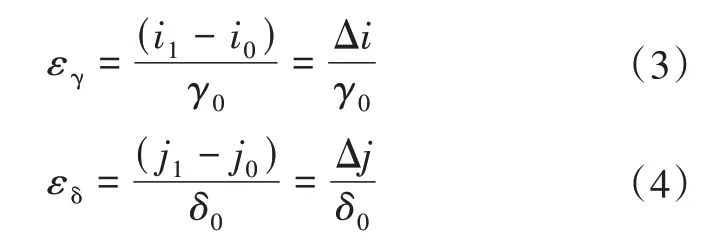
式(3)、(4)中, εγ为水平方向上的转换系数;εδ为垂直方向上的转换系数。
由于消防水炮在工作时存在较大的外部扰动, 以及由于传感器分辨率低及εγ、εδ计算不精确造成的误差, 导致整个控制系统的控制精度受到影响。因此, 单次调整后的红外图像中心与火源重心仍可能存在一定的偏差。为了提高定位精度, 利用调整后的红外图像中心与火源重心的偏差值对消防水炮进行反馈调节。
为了减小电机自身控制精度对火源定位精度的影响, 根据红外图像中心与火源重心的偏差值来选择合适的电机转速, 当偏差值较大时选择较大的电机转速, 当偏差值较小时则选择较小的电机转速。电机的转速可通过改变脉冲频率来调节, 脉冲频率越高则电机转速越高。当水平偏差值和垂直偏差值分别为Δx和Δy时, 水平电机和垂直电机的脉冲频率分别为
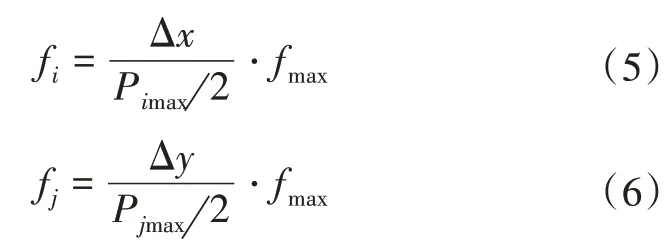
式(5)、(6)中, Pimax为红外阵列i方向的最大像素值;fmax为最大脉冲频率;Pjmax为红外阵列j方向的最大像素值。
火源定位过程中电机反馈控制流程如图1所示。首先计算火源重心与红外图像中心的偏差值, 然后计算水平电机和垂直电机的实际脉冲频率fi、fj, 最后转动消防水炮, 当火源重心与红外图像中心的偏差值小于等于ε时, 火源定位完成。
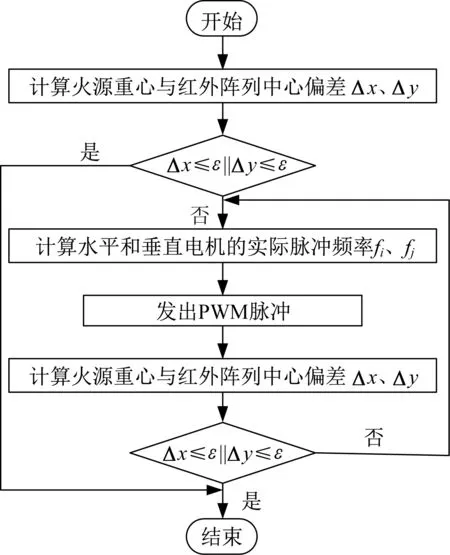
图1 电机反馈控制流程图Fig.1 Flow chart of motor feedback control
2 火源定位方法实验验证
搭建如图2所示的实验平台。在测试之前先对消防水炮旋转角度与像素坐标之间的转换系数进行标定。首先通过MLX90640获取火源的红外图像并利用上述的重心算法计算出火源在红外图像中的重心坐标, 得到火源重心坐标值P(i0,j0)为(19.24, 15.39)。然后控制水平电机与垂直电机分别调节30个脉冲值, 获取当前视场内的火源红外图像, 计算出该图像中火源重心坐标值P(i1,j1)为(27.83, 21.35)。最后计算出转换系数。

图2 消防水炮实验平台Fig.2 Fire water monitor experimental platform
水平方向转换系数为

垂直方向转换系数为

标定完成后开始对火源定位算法进行测试。图3为火源初始红外图像, 以图像的中心为原点建立坐标系, 原点坐标为(16, 12)。根据图像中的火源重心坐标值(27.83, 21.35), 计算出火源重心与红外图像中心的水平偏差值和垂直偏差值分别为11.83和9.35, 然后依据偏差值计算出水平电机和垂直电机所需调节的脉冲值。
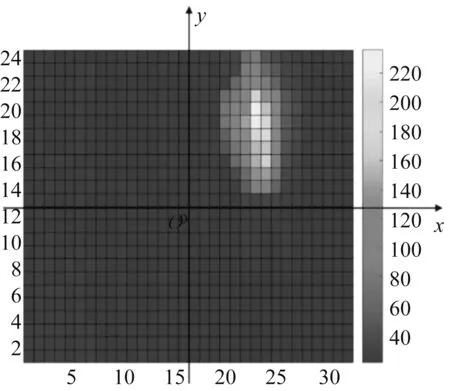
图3 火源初始红外图像Fig.3 Initial infrared image of the fire source
水平电机调节脉冲值为

垂直电机调节脉冲值为

调整消防水炮对准火源, 获得调整后的红外图像如图4所示。从图4中可以看出此时图像中心与火源重心仍存在一定的偏差, 经计算可得水平偏差为0.52, 垂直偏差为0.38。

图4 调整后的红外图像Fig.4 Adjusted infrared image
从上述结果可以看出单次调整后的红外图像中心与火源重心仍存在一定的偏差。于是采用反馈算法进一步调整消防水炮姿态, 得到如图5所示的结果。从图5中可以看出利用反馈算法调整后的红外图像中心与火源重心的偏差值明显降低, 达到了更好的火源定位精度。
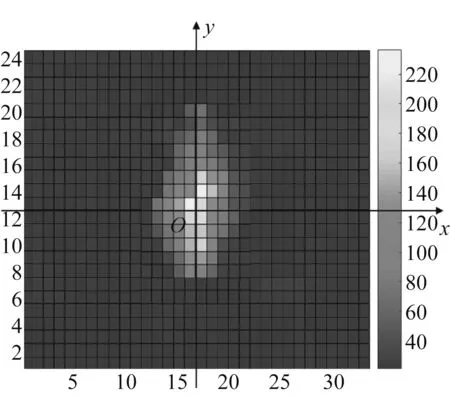
图5 基于反馈算法的实验结果Fig.5 Experimental results based on feedback algorithm
3 结 语
本文提出了一种基于红外阵列传感器的火源探测及快速定位方法。在探测到火源的基础上, 采用红外热成像技术获取火源的红外图像, 在红外图像上利用图像重心算法计算火源重心坐标, 并根据火源重心与图像中心的偏差对消防水炮进行反馈控制, 实现火源精确高速定位。实验结果表明本文提出的方法可有效提高消防水炮火源定位的效率和精度。该定位方法不仅适用于室内大空间消防水炮系统, 对其他的视觉跟踪应用亦具有良好的参考价值。