超声图像引导的机器人辅助定位系统设计与实验*
2022-09-27李泳耀
刘 冬,孙 斌,杜 宇,李泳耀,丛 明
(1.大连理工大学机械工程学院,大连 116024;2.大连交通大学机械工程学院,大连 116028)
0 引言
在工业生产、医疗手术等领域,手持超声探头成像和手动定位存在易疲劳、精度低等问题,机器人技术的发展促进了相关作业方式的重大改变[1-2]。以医疗手术为例,机器人辅助定位自引入临床实践以来,在不同的外科专业获得了广泛的普及,大大减轻了实施者的操作负担。在超声图像引导的探测定位目标点的工作中,往往需要医生凭借经验确定定位路线,另外,为了提高结果的准确性,还需要多次进行探测定位,这些因素都导致检测结果的不稳定,容易出现较大误差,整个定位过程也相对繁琐。
机器人可以更好地解决探测定位过程中的上述问题,世界各国学者也有许多研究。STOIANOVICI等[3]设计了在核磁共振环境中探测定位的3自由度机器人,但实际插入穿刺针是通过导轨手动执行的。YU、NG等[4-5]设计并制造了超声辅助定位的桁架式机器人,可在自动和半自动模式下运行,MELTSNER等[6]设计了6自由度的机器人,包括3自由度的位置调整、2个转动自由度以及定位针机构,采用电磁定位来调整针尖在组织中的位置。JUN等[7]设计的超声图像引导的探测定位机器人有4个自由度,可实现探测定位功能。目前大部分探测定位设备探头和定位针的独立运动自由度较少,整个机器人的灵活性相对较差。
在辅助定位方面,目前主要有CT、超声、核磁等引导的定位系统。杨婉等[8]设计了一种CT引导的定位穿刺方法,采用半自动的定位机构,由导轨导引医师手动穿刺的方向。孟纪超等[9]采用串并联机构设计研制了6自由度的穿刺定位机器人,基本实现了核磁共振环境下穿刺手术的机器人定位。毕津滔等[10]提出了一种基于电磁定位和超声图像相结合的机器人定位导航方法,可用于前列腺穿刺手术。
本文设计一种超声引导的机械臂辅助定位机器人系统。其中4自由度超声探头移动辅助机构,可以代替人工移动探头进入探测空间,得到更为清晰稳定的超声图像。将定位穿刺针固定在6自由度的UR5机械臂末端,再由图像引导机械臂进行定位穿刺。提高了定位的准确性、稳定性,减少定位穿刺次数。
1 机器人探测定位系统设计
1.1 探测机构设计
根据工业生产、医疗手术领域探测定位的实际需求,探测定位机构需要较高的灵活性和多自由度以调整进针位置和角度。因此设计4自由度超声探头移动机构,可以实现3个方向的移动和末端的旋转运动,超声探头可对准目标位置进行移动成像和引导定位,同时能调整探头角度以保证成像位置准确、清晰。探测定位机构采用6自由度的UR5机械臂,可以在工作空间内实现移任意角度、位置的定位,同时便于进行路径规划,可以更好地避免与其他各部分的碰撞。定位针固定在6自由度的UR5机械臂末端。机器人整体结构如图1所示。还包括探测定位平台架、无线超声探头及各部分的控制器等。
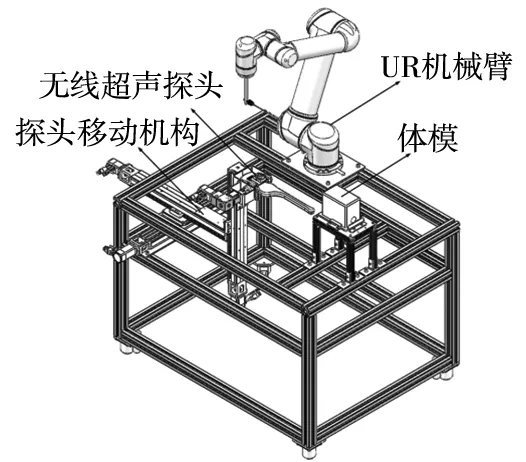
图1 探测定位机器人结构图
机器人主要由计算机、无线超声成像系统、UR5机械臂、四轴探头运动机构组成,基本连接方式如图2所示。其中超声探头采用无线传输,通过WiFi和计算机连接,在计算机内有对应的成像模块,可实时显示探测组织及定位针的位置状态。探头移动机构由4个伺服电机以及对应的伺服驱动器和运动控制器组成。为了提高信号响应速度使用了EtherCAT总线控制,同时极大程度地简化了系统的接线方式,也有助于提高控制系统的稳定性。机械臂的控制箱和探头移动机构控制器分别通过网线连接到同一路由器,路由器再与计算机连接,计算机通过不同的IP地址与机械臂、移动模组控制器通信,控制机器人的运动。

图2 穿刺机器人系统组成 图3 探头移动机构图
超声探头移动机构包括3个互相垂直的直线步进器,X和Y向的两个步进器滑块通过连接件固定,Z向步进器滑块固定于X向步进器末端,从而实现单个步进器的整体移动。在X、Y、Z方向的移动有效行程分别为500 mm、400 mm、500 mm,可以完成超声探头从外部进入人体的动作,在行程范围内可以调整机器位置避免与其他机构的碰撞,具体结构如图3所示。单个步进器的移动精度在0.01 mm以内,可以精确调节超声探头位置保证超声图像的准确和清晰。在Z向步进器的末端设计可旋转的固定机构,超声探头放置于可开关的固定器内,为了降低探头转速、提高旋转控制精度,增加了减速器,通过伺服电机控制其转动,进而使超声探头实现俯仰运动,有效俯仰角度在结构上可以达到180°,保证能根据需求调整图像角度,精准定位到成像位置。
1.2 探测定位过程工作原理
如图1和图3所示,当进行探测定位时,超声探头移动机构先控制末端探头保持水平,再调节3个方向步进器,使探头对准探测目标。这里以体模内部的生物体为探测定位对象,之后X向步进器移动,使探头进入目标,当需要调整成像角度时,控制伺服电机旋转使超声探头移动同时进行俯仰运动。俯仰时需要维持成像位置不变,因此保持探头末端固定不动,所需要的位置变动量由Y向和Z向步进器进行补偿。进入目标体后超声探头要扫描整个目标体,移动距离为其长度d,并按照固定间隔获取它的二维超声图像,其中部分图像序列如图4所示。

图4 采集的部分体模超声图像
得到二维图像序列后,通过二维图像分割和三维重建算法对图像进行处理,得到组织的三维模型,确定三维模型中的定位点坐标信息,再将图像坐标转化为机械臂的基坐标系下的坐标值。UR5机械臂的控制是基于ROS机器人操作系统,对其进行正运动学和逆运动学解算。通过程序对机械臂的初始位姿、定位动作进行规划,从而使机械臂按照设计的定位路径执行定位动作。具体机器人定位流程如图5所示,其中虚线部分本文只作为应用。
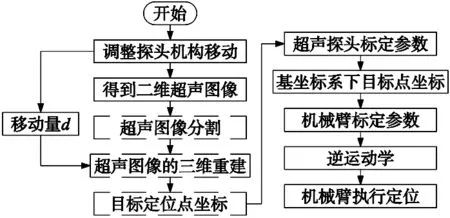
图5 机器人探测定位工作过程流程图
在超声引导下的探测定位中,以前列腺穿刺活检为例,采用经会阴前列腺穿刺活检对患者损伤小,出血和感染发生率低。在采用此种方式进行穿刺定位时,根据超声下前列腺体积的大小,分为12个区域并根据实际情况穿刺8~12针,对于异常超声区域,可加穿刺1~2针[11-12]。
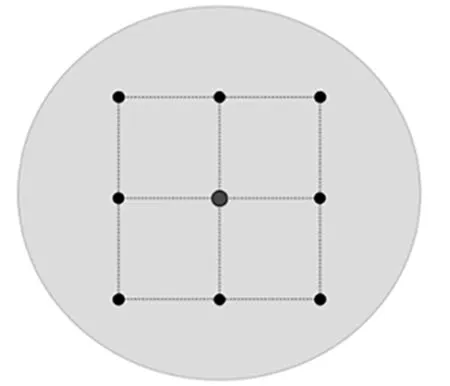
图6 系统定位点位示意图
在进行定位实验时,采用的体模较实际情况更为标准,不需要考虑实际病情因素对定位点的要求,因此在设计定位点时仅考虑机器人的定位要求,采用等间距取得。以9针定位为例进行定位点规划,先通过生物体三维模型确定其中心点坐标,再以此点为中心确定定位矩阵点如图6所示。
2 探测定位系统运动学分析
2.1 超声探头运动机构
探头运动机构有X、Y、Z三个方向的移动自由度和一个俯仰自由度如图所示,当探头旋转角度α时,探头末端固定不动,这就需要X和Z向步进器移动进行位移补偿。其中探头旋转部分长度为L。将模型简化后,初始位置如图7实线所示,探头转动α后X和Z向步进器位置如图7虚线所示。

图7 探头移动机构转动示意图
X轴移动补偿位移为:
δX=L(1-cosα)
(1)
Z轴移动补偿位移为:
δZ=Lsinα
(2)
之后在伺服控制器中进行算法程序设定,将整个旋转和补偿动作进行同步,使机构实现目标运动效果。
2.2 机械臂路径规划
2.2.1 目标点的定位

(3)

(4)
(5)
(6)

(7)

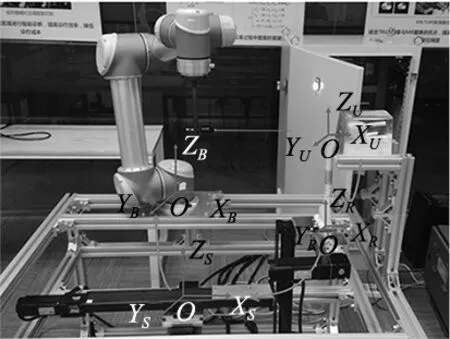
图8 机器人坐标系位置
2.2.2 机械臂定位路径

图9 机械臂定位动作
3 实验测试
基于搭建的实验平台如图8所示,以体模内组织为定位目标进行定位实验,取体模组织中心点m(300,400,525.5)为定位点进行了10次超声图像引导的定位实验,在X、Y、Z三个轴坐标值及平均值的统计结果如表1所示。实验定位点的空间位置如图10所示,其中标记圆半径为8 mm。
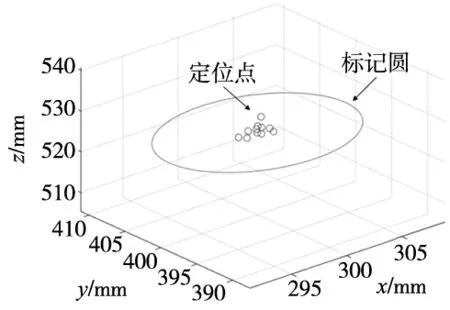
图10 实验定位点空间位置图
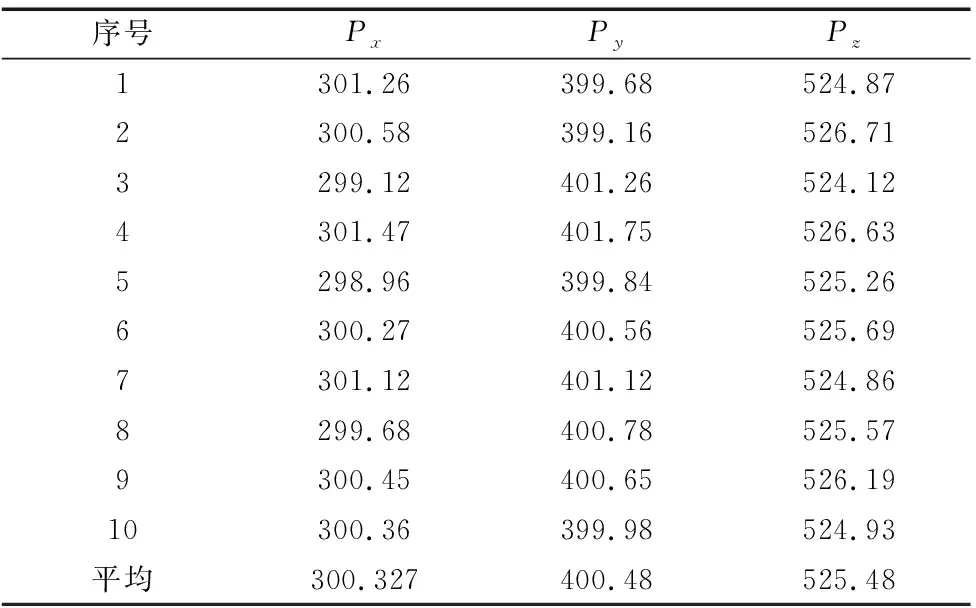
表1 超声图像引导的定位数据表 (mm)
对数据进行统计分析,定位点在X、Y、Z三个方向的误差如表2所示,平均误差和最大误差均小于2 mm。结果证明机器人系统可以根据设计流程实现超声图像引导的定位,且精度满足要求。
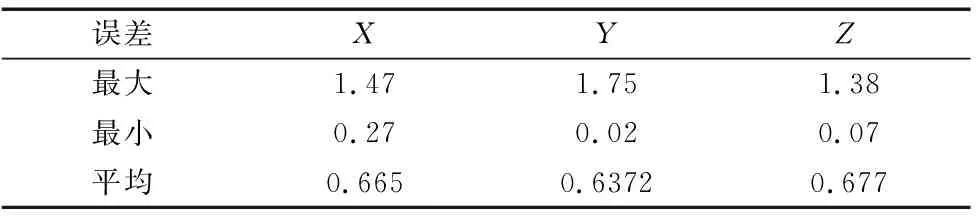
表2 定位误差表 (mm)
定位过程中机械臂末端即定位针到原点及定位点的位置关系如图11所示,其中X、Y、Z方向为机械臂坐标系OB-XBYBZB的方向。
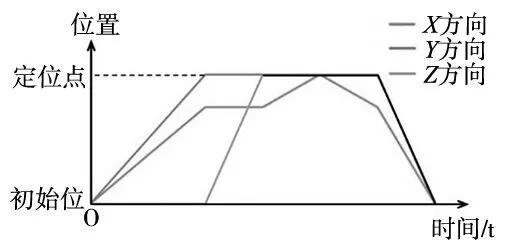
图11 定位针与定位点位置关系
由于不同材料、组织在超声下的图像灰度不同,定位时超声系统可实时显示定位针的位置如图12所示,其中浅灰色部分为生物体组织,中心黑色部分为需要定位的点的范围,定位点中白色亮点即为定位针的位置。
实验过程对体模的破坏不可逆,所以最大程度上减少定位点数量,同时为了更好体现中心点的位置和满足多点定位的需求,选取9个点进行系统多点探测定位实验。以定位点P(-300,400,525.5)为基准定位点,再以其为中心,横纵向距离均为10 mm获取点P周围的8个定位点。系统定位执行时,根据规划好的点位依次执行动作。为使实现结果更为直观,得到明显的定位孔位,在体模上附纸,实验后留下针孔,定位实验后的体模及孔位情况如图13所示。

图12 定位中体模的超声图像 图13 系统定位实验图
4 结论
本文设计了一种用于辅助探测定位的机器人系统。机器人包含探头4自由度超声探头移动机构、6自由度机械臂定位机构。探头移动机构采用的丝杠滑轨可以使成像稳定,同时末端机构可以让探头实现大角度的俯仰运动,机器人整体的工作空间较大,灵活性好。通过超声图像的引导,机械臂能较为精确地实现超声图像引导下的辅助定位,并以体模的探测定位为例,进行了体模探测定位实验,实验结果满足了设计需求。精度可以在2 mm以内。
