基于果蝇优化算法的反馈控制型直流稳压电源研究
2022-09-26刘韵婷李绅科邵志良方文标
刘韵婷 李绅科 邵志良 方文标 郭 辉
基于果蝇优化算法的反馈控制型直流稳压电源研究
刘韵婷1李绅科1邵志良2方文标2郭 辉3
(1. 沈阳理工大学自动化与电气工程学院,沈阳 110000;2. 中策橡胶(建德)有限公司,杭州 311600;3. 沈阳工业大学体育装备产业技术研究院,沈阳 110000)
针对目前精密直流电源领域存在的调整精度低、结构复杂和输出直流电不纯的问题,本文提出以STM32单片机为核心控制器,最终实现输出精稳的12V和5V直流电源的方法。该方法首先通过变压器将220V交流电压变换到48V,并通过整流桥后经过两个Buck电路进行斩波;然后使用PID实现对PWM输出波形状态的控制,其中PID的各项参数使用果蝇优化算法(FOA)进行优化;最后对传统的PID算法与果蝇优化算法进行动态特性负载突增和负载突降对比实验,实验结果证明了本文所提方法的有效性。
数显反馈控制;直流稳压电源;果蝇优化算法;Buck电路
0 引言
作为一种电源技术,数字控制的直流稳压电源是一种较为通用的电子仪器[1-2],与处理模拟信号相比,使用数字信号具有许多优势[3]。随着电子设备中数控电源的广泛使用,很多高精尖产品对电源的精稳性有了更高的要求。通用电源由于系统故障会出现一定的错误,影响设备的正常生产运行。如果准确率无法保证,那么在设备运行中不可控事件发生的概率就会大大增加[4]。因此,为保证电源产品的安全性和可靠性,任何级别的精密电源在出厂前都要经过严格检测,必须达到相关标准才可以量产并进入市场[5]。然而,目前市场上的高精度直流电源存在调整精度低、结构复杂和输出直流电不纯的问题,本文主要针对高精度直流电源调整精度低的问题进行研究。
1 反馈控制型直流稳压电源系统原理
数控直流稳压电源系统框图如图1所示。在完成整流滤波的工作后,分别经过两个Buck降压式斩波电路[6],得到最终所需要的12V和5V的直流电压。Buck电路中开关管的通断是由控制器输出的PWM波形进行控制的。为了使系统能够完成快速而稳定的调压降压工作,系统采用闭环回路控制,通过采集输出端的输出电压,经过A-D转换操作[7],将电压以数字信号的形式传递给控制器,控制器将采集到的信号与期望值作差,利用PID算法对得到的差值进行调节,控制PWM波的发生[8],从而控制开关管的工作频率达到期望频率,最终实现对系统的闭环反馈控制调节。
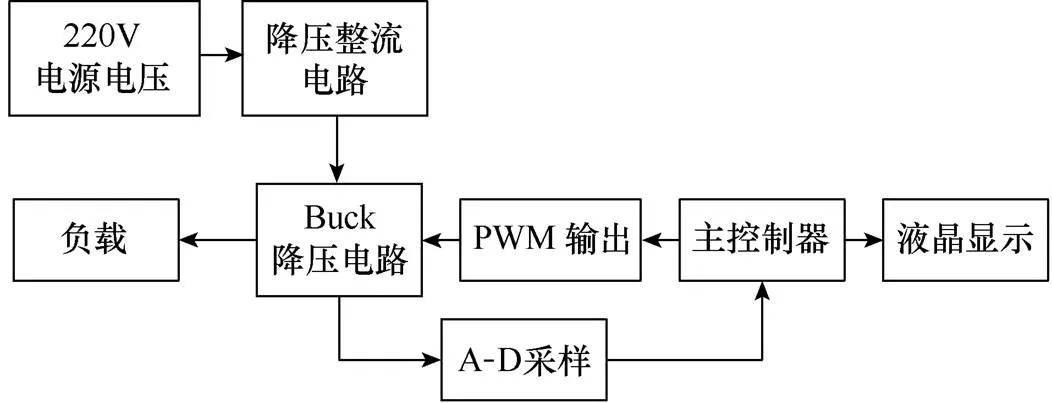
图1 数控直流稳压电源系统框图
2 系统电路工作原理及其控制方法
2.1 Buck电路
Buck主电路原理如图2所示[9]。现阶段市面上大部分的降压电路和开关电源都是采用Buck电路。本文选用PID控制方式完成对Buck电路的控制,通过数学公式的推导对相关的控制参数做数值计算与选择,完成对Buck电路的分析研究。
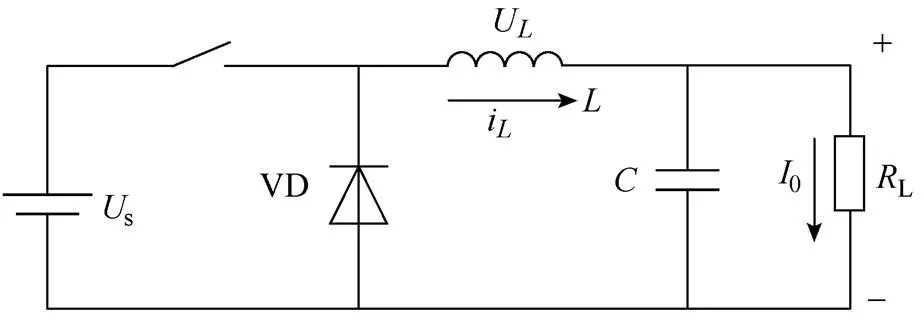
图2 Buck主电路原理
2.2 果蝇优化算法-PID算法实现
将果蝇优化算法(fruit fly optimization algorithm, FOA)归纳为几个重要的步骤,以此来进行PID参数的寻优工作,具体寻优过程如下[10]:
1)设置果蝇种群规模sizepop。
2)设置果蝇种群的迭代次数maxgen。
3)随机生成果蝇群的初始位置,进行算法的初始化工作。
4)随机分配PID参数p、i、d的数值,对应的计算公式为



式中:p1、i1、d1分别为p、i、d的初始值;rand为随机数;取值范围为1~sizepop。
5)将分配好的p、i、d代入上述选取的最优性能控制指标中,求出该果蝇个体所对应的系统误差。
6)记录此时系统误差最小值所对应的p、i、d值。
7)循环执行4)~5)过程,系统自动进入迭代寻优过程,不断检测并更新系统最小误差值,更换一次就执行6)。迭代结束后,果蝇优化算法也随之结束。
3 系统仿真实验
3.1 Buck电路的仿真测验
利用Simulink软件搭建Buck电路仿真模型,并进行开环、闭环PID控制器校正的仿真,以仿真输出波形验证闭环PID控制的优越性。
首先对Buck电路的可行性进行仿真实验研究,采用开环仿真模式,用Simulink中的模块搭建开环Buck电路仿真模型如图3所示。
设定PWM波形及电源电压、电感、电容、电阻参数,得到开环Buck电路仿真电压输出12V和5V曲线分别如图4和图5所示。通过仿真结果可以发现,输出电压值在要求范围内,证明输入参数的设定取值合理。但是,系统输出的波形存在较大误差,且输出波形的波动频率较大,这是开环控制的缺陷。如果系统处于开环状态时存在扰动,则输出的波形难以调控。因此,本文选用PID闭环反馈的方式对Buck降压斩波电路进行控制[11]。
通过对开环Buck电路的仿真分析,加入闭环反馈调节控制能降低系统输出所带来的误差,引入PID控制算法对PWM波形进行调节,进而控制MOS管的导通与关断,实现降压斩波功能。闭环Buck电路PID仿真模型如图6所示。
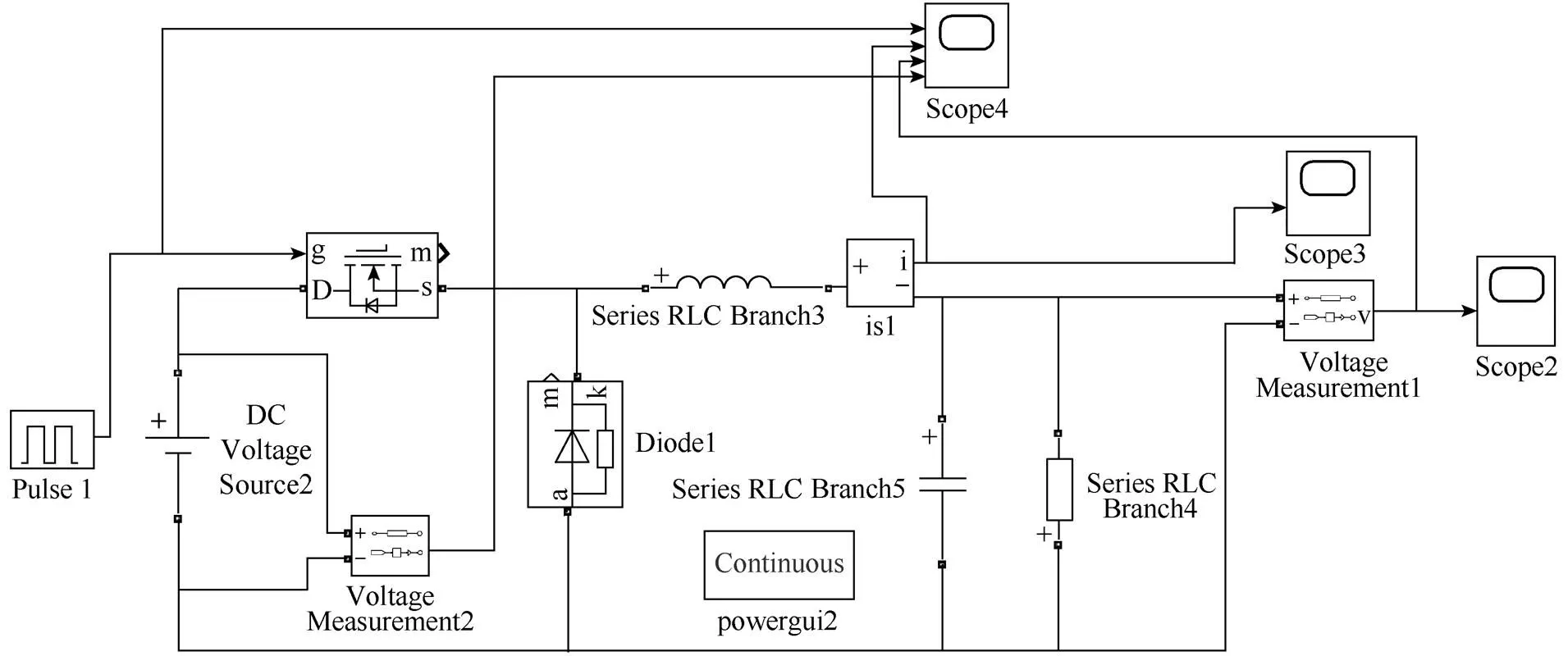
图3 开环Buck电路仿真模型

图4 开环Buck电路仿真电压输出12V曲线

图5 开环Buck电路仿真电压输出5V曲线

图6 闭环Buck电路PID仿真模型
闭环Buck电路仿真电压输出12V和5V曲线分别如图7和图8所示。通过对闭环PID调节的Buck降压斩波电路仿真可知,在利用PID算法调节PWM输出波形的情况下,输出电压能够快速平稳地达到目标值,且有效降低了系统的稳态误差,由此可以证明,闭环控制对调节系统的性能指标起到了极其重要的作用。但对于PID的参数整定还需要通过优化算法来进一步优化。

图7 闭环Buck电路仿真电压输出12V曲线
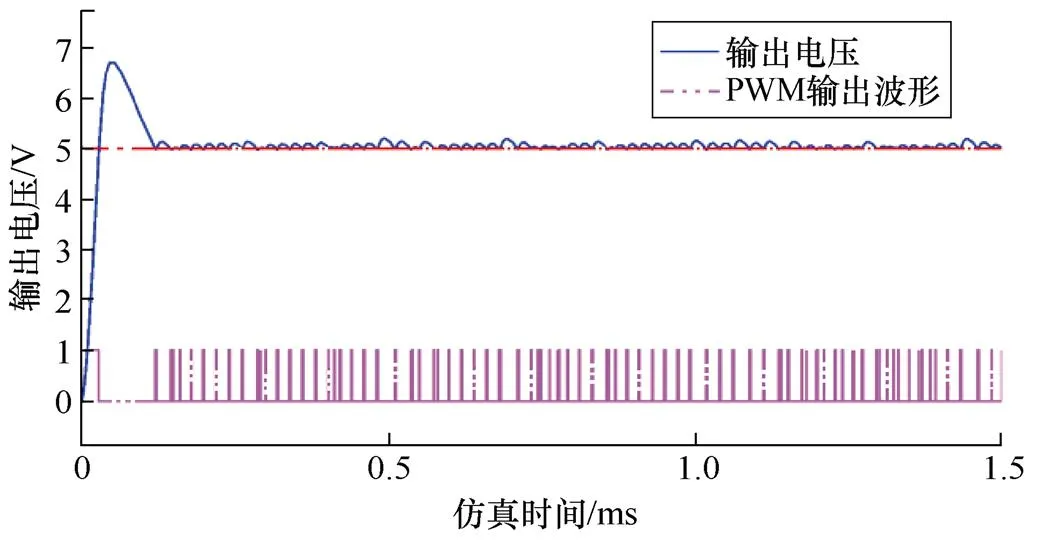
图8 闭环Buck电路仿真电压输出5V曲线
3.2 FOA对PID的参数整定
通过对Buck降压斩波电路的仿真可以证明,闭环电路的输出特性要优于开环电路的输出特性,故本文以时间乘误差绝对值积分(integrated time absolute error, ITAE)指标所反馈的系统误差值来判定参数优化的效果,将求得的ITAE误差最小值对应的p、i作为PID最终的优化值。FOA程序初始化参数设定见表1。图9为FOA-PID仿真模型。经过仿真后,图10和图11为输出电压为12V的参数寻优曲线和输出电压波形,图12和图13为输出电压为5V的参数寻优曲线和输出电压波形。

表1 FOA参数设定
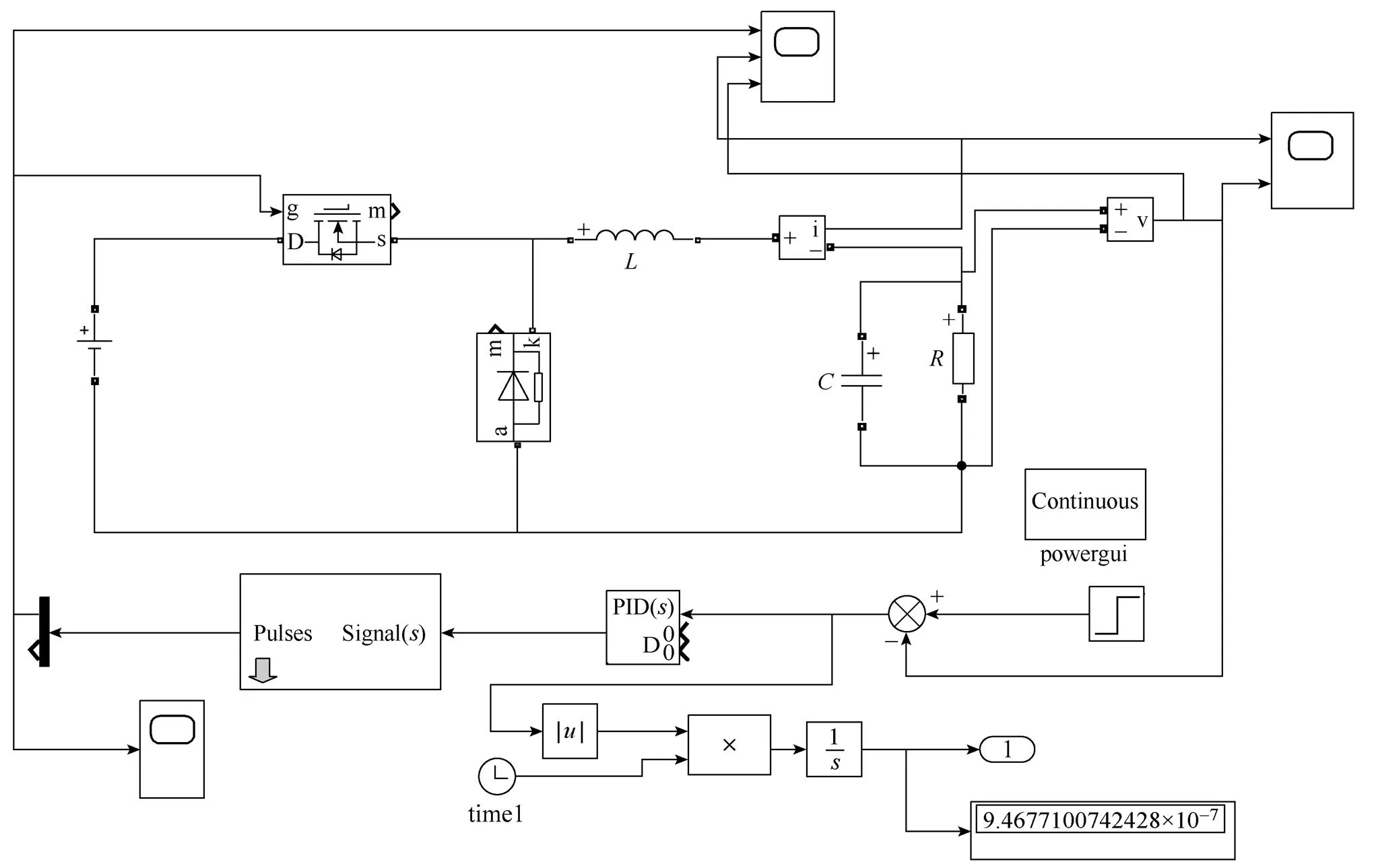
图9 FOA-PID仿真模型
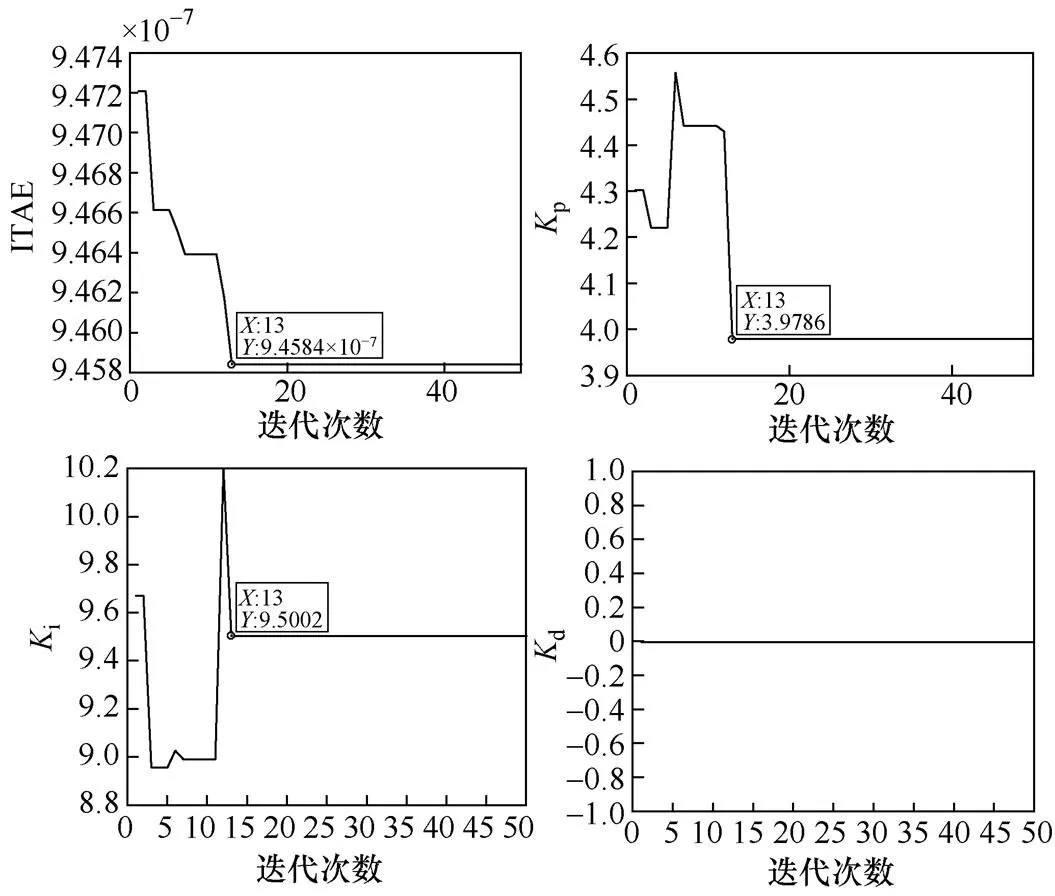
图10 输出电压为12V的相关参数寻优曲线
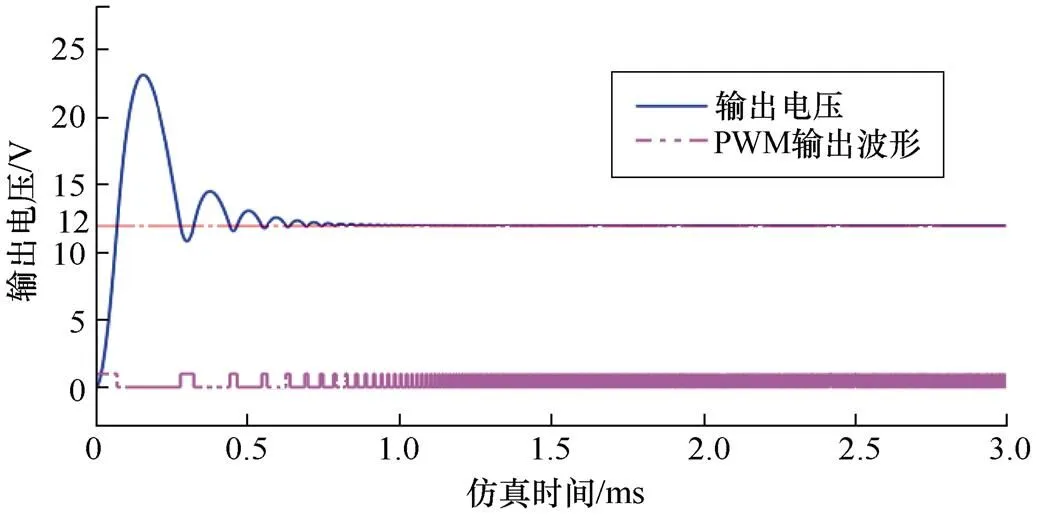
图11 经过算法寻优后的12V输出电压波形
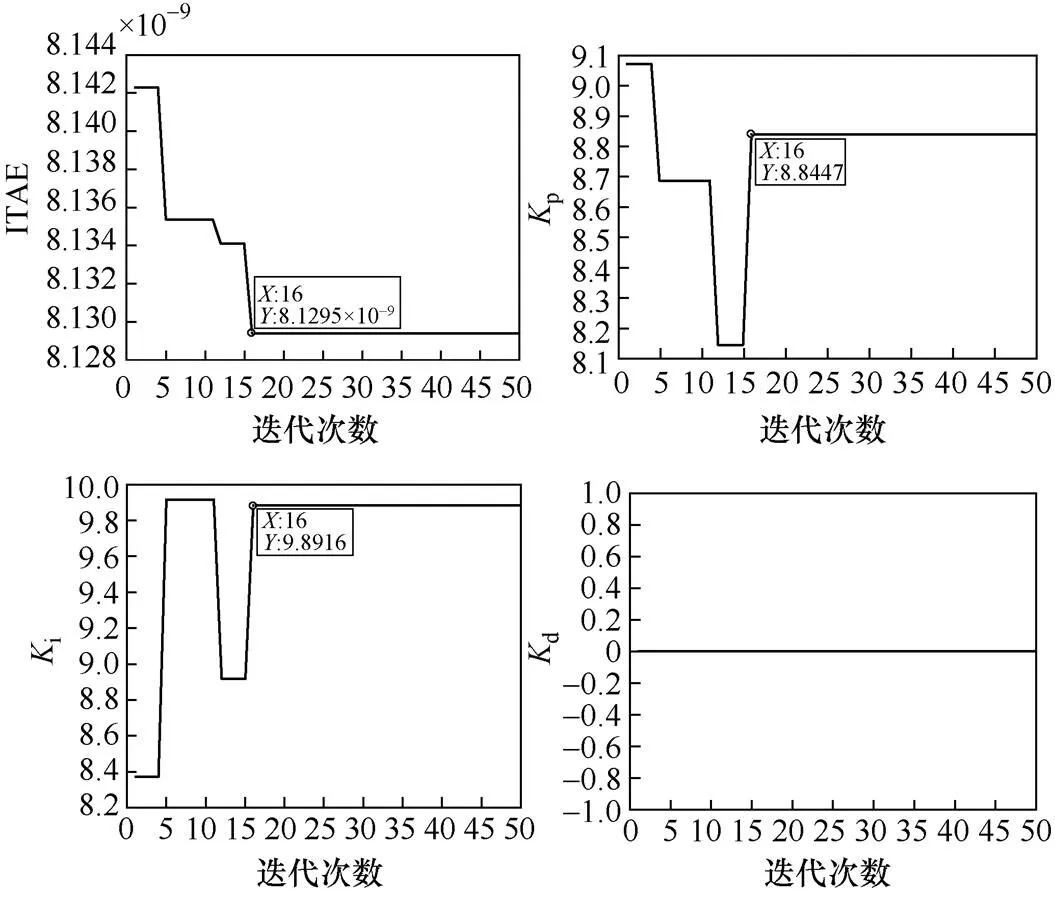
图12 输出电压为5V的相关参数寻优曲线
从图7、图8与图11、图13的对比可以看出,经过FOA优化PID参数后所输出的电压波形明显优于手动调节PID参数所输出的波形。经过优化后的PID参数取值更为精确,系统的稳态误差得到明显改善,系统输出电压的脉动频率与幅值也大大降低,由此证明了FOA对PID参数调节的可行性与有效性。

图13 经过算法寻优后的5V输出电压波形
为进一步验证FOA对PID参数调节的有效性,以闭环Buck电路输出电压为5V的情况为例,增加负载突增和负载突降实验进行仿真研究,仿真输出波形如图14~图17所示。
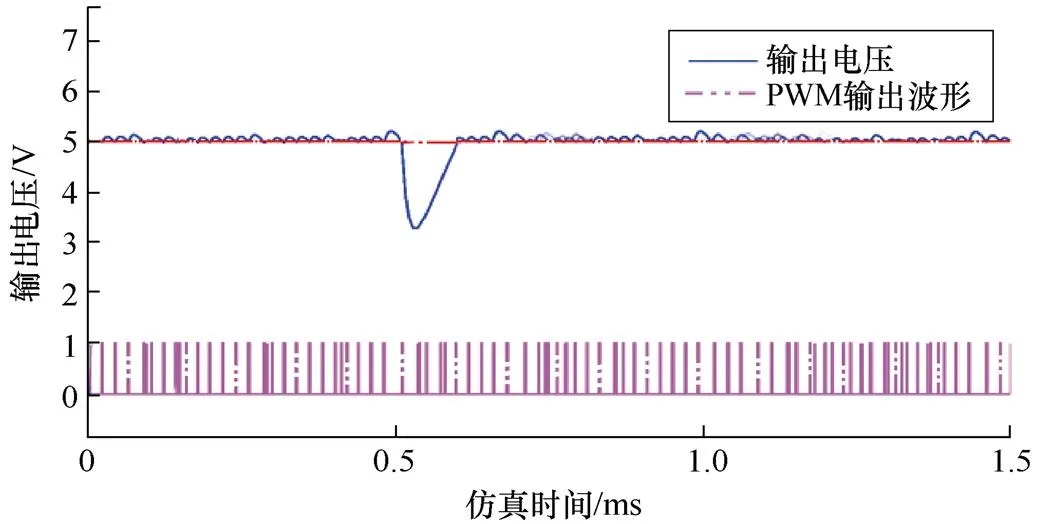
图14 闭环Buck电路负载突增5V输出电压波形
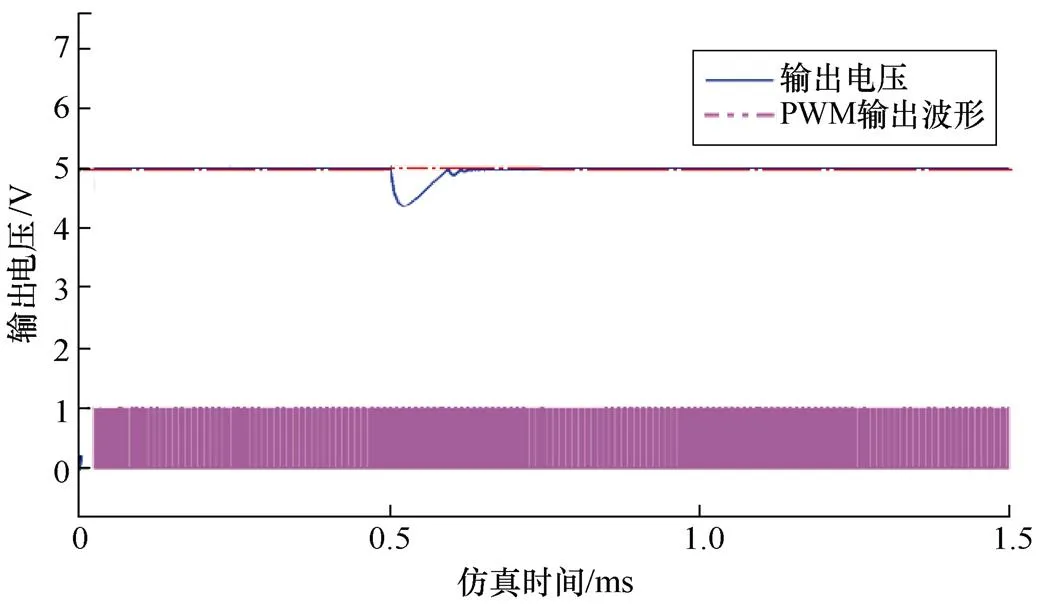
图15 经过算法寻优后的负载突增5V输出电压波形

图16 闭环Buck电路负载突降5V输出电压波形
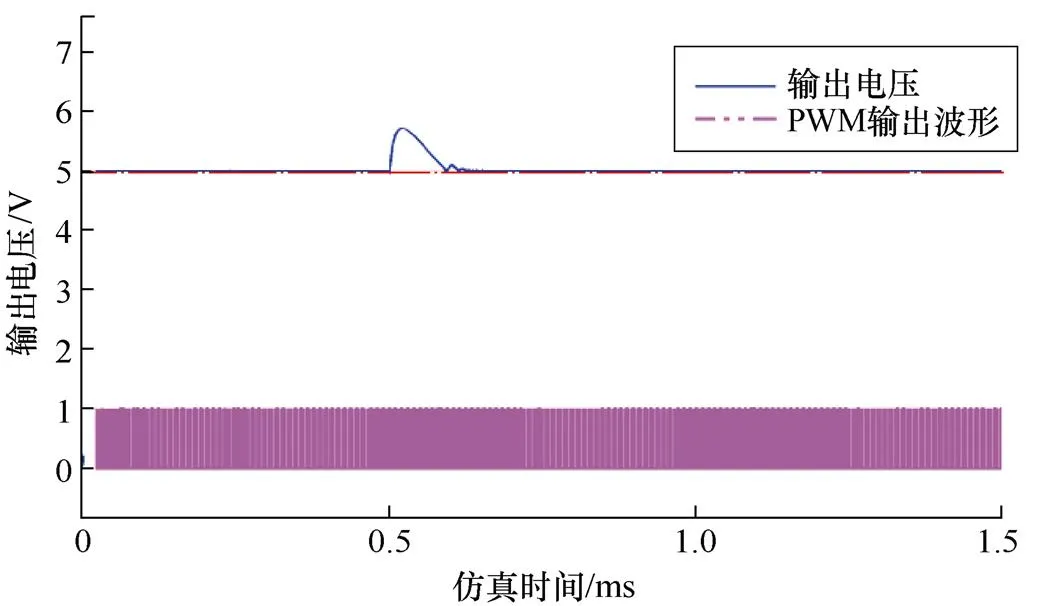
图17 经过算法寻优后的负载突降5V输出电压波形
由图14可知,闭环Buck电路负载突增时,输出电压在0.2ms时间内产生-2V左右的波动,然后迅速恢复到5V,该误差较大;由图15可知,经过算法寻优后,负载突增时,输出电压在0.2ms时间内产生-0.8V左右的波动,然后迅速恢复到5V,该误差在可接受范围内。
由图16可知,闭环Buck电路负载突降时,输出电压在0.2ms时间内产生2V左右的波动,然后迅速恢复到5V,该误差较大;由图17可知,经过算法寻优后,负载突降时,输出电压在0.2ms时间内产生0.8V左右的波动,然后迅速恢复到5V,该误差在可接受范围内。
4 结论
本文首先阐述了数显反馈控制型直流稳压电源的工作原理,并利用Buck降压斩波电路获得系统所需的电压。结合FOA对闭环控制回路的PID控制器相关参数进行了优化整定,以ITAE性能指标来判定FOA对PID参数优化的效果。最后利用Simulink软件进行仿真研究,通过对比输出电压波形证明了闭环控制PID调节能够优化系统的输出,仿真结果达到了系统所要求的各项性能指标。
[1] WAGEH S, RAISSI M, BERTHELOT T, et al. Digital printing of a novel electrode for stable flexible organic solar cells with a power conversion efficiency of 8.5[J]. Scientific Reports, 2021, 11(1): 14212.
[2] 杨兴龙. 一种软开关高功率因数直流电源的设计[J].电气技术, 2011, 12(10): 81-83.
[3] 王鹏举, 何丰, 陈国平, 等. 基于STM32F7的可编程电源显示系统设计与实现[J]. 液晶与显示, 2021, 36(7): 973-982.
[4] MARKOVIC U, STANOJEV O, ARISTIDOU P, et al. Understanding small-signal stability of low-inertia systems[J]. IEEE Transactions on Power Systems, 2021, 36(5): 3997-4017.
[5] 侯元祥, 巫庆辉, 蔡健哲. 基于二阶滑模控制的定频Buck数字电源设计[J]. 电气技术, 2021, 22(5): 56-61, 72.
[6] 陈浩, 张代润. 基于恒压/最大功率点跟踪的户用离网型太阳能控制器仿真研究[J]. 电气技术, 2019, 20(9): 14-19.
[7] GOMIS-BELLMUNT O, SANCHEZ-SANCHEZ E, AREVALO-SOLER J, et al. Principles of operation of grids of DC and AC subgrids interconnected by power converters[J]. IEEE Transactions on Power Delivery, 2021, 36(2): 1107-1117.
[8] 肖启明, 杨明, 刘可述, 等. PMSM伺服系统速度环PI控制器参数自整定及优化[J]. 电机与控制学报, 2014, 18(2): 102-107.
[9] 李清海, 田相鹏, 朱黎. 基于单片机的线性直流稳压电源的设计[J]. 湖北民族大学学报(自然科学版), 2020, 38(2): 226-230.
[10] 高俊国, 孟睿潇, 胡海涛, 等. 电机定子绝缘老化寿命预测研究进展[J]. 电工技术学报, 2020, 35(14): 3065-3074.
[11] 刘树林, 郝雨蒙, 李艳, 等. 基于最大功率的本安Buck变换器设计方法[J]. 电工技术学报, 2021, 36(3): 542-551.
Research on feedback control DC regulated power supply based on fruit fly optimization algorithm
LIU Yunting1LI Shenke1SHAO Zhiliang2FANG Wenbiao2GUO Hui3
(1. School of Automation and Electrical Engineering, Shenyang Ligong University, Shenyang 110000;2. Zhongce Rubber (Jiande) Co., Ltd, Hangzhou 311600;3. Sports Equipment Industry Technology Research Institute, Shenyang University of Technology, Shenyang 110000)
Aiming at the problems of low adjustment accuracy, complex structure and impure output DC power in the field of precision DC power supply, this paper proposes a method to achieve precise and stable 12V and 5V DC power supply with STM32 microcontroller as the core controller. In this method, the 220V AC voltage is first transformed to 48V through a transformer, and then chopped by two Buck circuits after passing through the rectifier bridge. The control of the PWM output waveform state is realized through PID, in which the parameters of the PID are optimized by the fruit fly optimization algorithm (FOA). By comparing the traditional PID algorithm and the fruit fly optimization algorithm, the effectiveness of the method proposed in this paper is proved by the dynamic characteristic load surge and load dump experiments of the output load.
digital display feedback control; DC regulated power supply; fruit fly optimization algorithm; Buck circuit
2022-04-11
2022-05-26
刘韵婷(1983—),女,博士,副教授,主要从事人工智能、数据分析和传感器网络研究工作。
辽宁省教育厅项目(LJGD2020019)
