基于FSC大学生方程式赛车的转向系统设计*
2022-09-26林健锋周金伟
赵 煜,林健锋,黄 玲,周金伟,张 博
(广东白云学院,广东 广州 510450)
转向系统设计是电动方程式赛车中一个不可或缺的系统,车手操纵赛车一般都得依靠转向系统。车手通过转动方向盘把转动力矩通过转向轴传递到转向器中,转向器将转动力矩转变为垂直于车辆中轴线的力,紧接着将力传递到横拉杆拉动立柱实现转向;与此同时,赛车飞驰于赛道上的工况也由轮胎传递给转向器,再由转向器反馈给车手,车手便会感知赛车每刻的状态从而进行适当地调整让赛车发挥出更极致的性能。因此,转向系统对赛车能否发挥到极至的性能以及能否给到车手良好的路感反馈起到至关重要的作用。本文以广东白云学院2020设计的FSC(Formula Student China)赛车为研究对象,叙述赛车转向系统的设计过程,并对其中重要的零部件进行受力分析。
1 转向系统概述
1.1 转向系统简介
FSC大赛规定转向系统为机械转向系统,并且严禁使用带有电子助力和机械助力的装置。考虑到电动方程式赛车较为紧凑,从而导致转向系统安装位置受到车架、轮边以及悬架位置的影响,而赛道路面平整,不会对于车轮产生较大的冲击力,且赛道存在多个发卡弯使得赛车转向要比家用车灵敏,决定选择赛车的转向系为齿轮齿条式转向系统。
齿轮齿条式转向系统主要由方向盘、快拆器、转向柱、万向节、转向轴、转向器、转向拉杆和限位块组成,如图1所示。方向盘能将车手作用在方向盘的力转化为力矩后转递给转向柱;快拆器能够快速安装与拆卸方向盘;转向柱连接方向盘与万向节的杆件;万向节能实现变角度动力传递的机件[1];转向轴将力矩的作用继续传递给转向器;转向器一般均为齿条式,将力矩的作用进行变换传递给转向拉杆,使赛车能够转向;转向拉杆与立柱相连使两车轮能够同步转向;限位块防止转向连杆转向过度使机构反转。
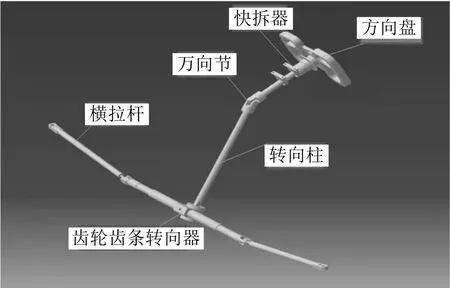
图1 齿轮齿条式转向系统
1.2 转向系统设计流程
根据“E54”转向系统设计目标,结合赛规,转向系统设计如下:①确定整车总布置,包括前后轴距、轮距、整备质量、前后轴荷比、四轮定位等;②确定转向系统基本参数,包括最小转弯半径、转向机传动效率、转向系角传动;③计算转向系统性能参数,包括外轮最大转角、转向器单侧最大行程、梯形臂长度等;④对齿轮齿条及固定装置进行受力分析并进行强度校核。
2 转向系统设计
2.1 设计背景
本转向系统以中国大学生电动方程式大赛第19赛季广东白云学院电动方程式赛车队设计的“E54”为基础对转向系统进行设计,“E54”整车设计参数如表1所示。

表1 “E54”整车设计基本参数表
2.2 转向系统基本参数
2.2.1 外侧车轮最大转向角度
为了限制比赛过程中赛车行驶速度过高,同时想让车手将对于赛车的把控技巧更加充分显现出来,并且考验赛车是否能达到车队设计目标,因此组委会设计了较多发卡弯道的赛道。根据赛道的情况,初步确定赛车最小转弯的半径为3.5 m。当赛车在赛道上驰骋时,外轮的最大转向角度对整车过弯半径起决定性的作用。所以,根据初定的转弯的最大半径计算出外轮的最大转角,即:

式(1)中:R0为转弯半径,mm;L为轴距,mm;θ0为外侧车轮最大转向角度,°;c为主销偏置距,mm,根据队内整车设计初定为10 mm。
由上式得θmax=26.1°,确定赛车转向时外侧轮转向角度为26°。
2.2.2 方向盘最大转角
方程式赛车的转向系必须能够使赛车快速准确地改变赛车的行驶方向,而且还必须让赛车手快速准确地进行操纵。方程式赛车转向系一个很大的特点就是方向盘与转向轮转角的角传动比很小,远远小于一般轿车的15~20[2]。
根据人机工程学不难发现,在95%人体模型下赛车手对方向盘最大转角无法超过210°。而且本文认为赛车手在高速过弯的情况下需要对方向盘进行快速转动,由于赛规明确转向系统禁止使用转向助力,因此对赛车手的爆发力和耐力是一项巨大的挑战。综上所述,本文初定方向盘的角传动比为5∶1,即当赛车最外轮转角为26°时,方向盘需转动130°。
3 转向器基本参数的设计
3.1 齿轮轴设计
一般家用车齿轮齿条转向器齿轮模数一般在2~3 mm之间[3],随着近几年中国大学生方程式的飞速发展,各种零部件的材料和结构得到极大的提升,同时也考虑到轻量化对赛车带来良好的影响,本文初定于主动齿轮轴模数m为1.5,齿数z为19,压力角为20°,齿轮螺旋角为0°。
3.2 转向器最大单侧行程计算
当方向盘单侧转角最大时,转向器单侧行程也达到最大。当转向柱采用2个十字联轴器组成等速转向节时,方向盘转动的角度即为转向器的齿轮轴转向的角度。因此,齿轮轴转动的最大弧长即为转向器的最大单侧行程,即齿条的最大行程为:

式(2)中:LR为齿条的最大行程,mm;αmax为方向盘最大转角,即130°。
由上式得LR=32 mm,因此齿条总行程为64 mm。
3.3 梯形臂的设计计算
梯形臂又叫转向节臂,是转向传动装置的最后一级传力部件,转向节臂安装在左右转向节上,另一端用球销和横拉杆接连[4]。梯形臂的长度间接决定了转向过度和转向不足,同时也会带给车手不同程度的路感
4 转向梯形设计计算
4.1 断开点位置计算
本赛车采用的是不等长双A臂悬架,为了配合悬架,决定采用断开式转向,由于赛车初定卡钳后置,为了避免与卡钳产生干涉,采用转向前置梯形布置。
通过三心定理可以确定断开点的具体位置,具体如图2所示。
图2中BC、AD为不等长A臂在前轴正切面的投影,CD为立柱上下球头在前轴正切面的投影,点H为转向横拉杆的投影点。

图2 三心定理确定断开点
延长AD与BC交立柱CD的瞬心为P点,连接PH;延长AB与CD交于F点,连接PF;此时连接CH并延长至G点,连接PG,G点必须满足∠DFP=∠HGP(G略高于F);连接GB并延长交PH于点E,E为断开点位置。
4.2 阿克曼转向几何计算
阿克曼转向几何(Ackermann steering geometry)是一种为了解决交通工具转弯时,内外转向轮路径指向的圆心不同的几何学。阿克曼转向几何如图3所示。
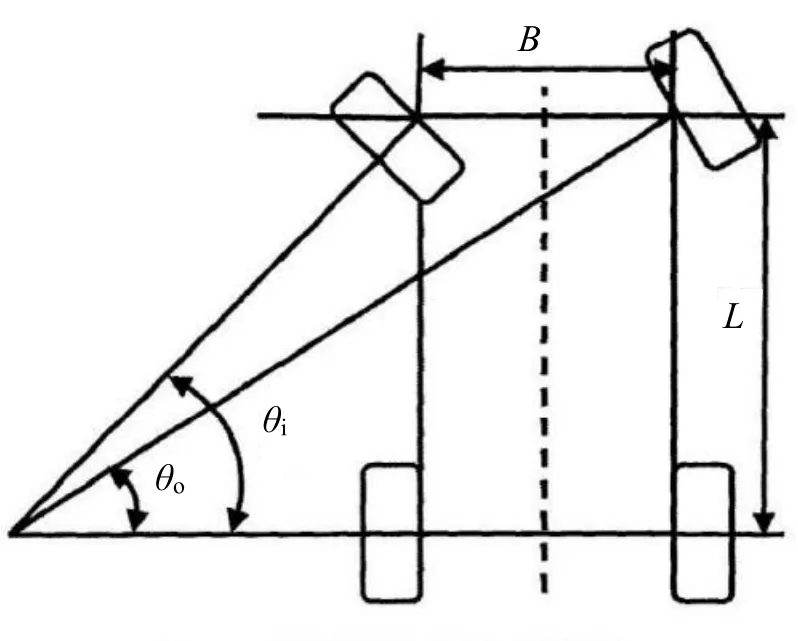
图3 阿克曼转向几何
阿克曼转向几何的表达式为:

式(3)中:θi为实际内轮转角,°;θo为实际外轮转角,°;B为当主销后倾角为0°时两侧主销延长线与地面的交点之间的距离。
因此,在通过式(3)和上文所设计得到的最外轮转角下得出内轮转角,即:

当赛车在高速过弯时,赛车轮胎会出现侧偏的现象,当要减少车轮对地面产生轴向侧偏力时,则赛车外轮最大转角要大于在标准阿克曼转向下的外轮最大转角,即赛车的转向关系由转向不足向平行转向过度。因此引入阿克曼校正系数,即:

式(5)中:θit为外轮在标准阿克曼系数影响下内轮的转角,°。
当K=1时,为标准阿克曼转向;当K=0时,为平行转向,即内外轮转角大小一致;当K<0时,为反阿克曼转向。
转向梯形设计参数优化的目的是使左右轮实际转角关系尽可能接近目标转向关系式,即阿克曼校正系数为43%时的转向关系。为了综合评价在全部转角范围内两者接近的精确程度,考虑到在最常使用的中小转角时,希望两者尽量接近,在设计中引入加权因子ω构成的目标函数[5],即:

最大外轮转角为26°,加权因子取值如下:当ω=1.5时,0<θo<10°;当ω=1.0时,10°<θo<20°;当ω=0.5时,20°<θo<θmax。
综上所述,在43%阿克曼转向几何下实际内轮转角为32°。
4.3 梯形臂的设计
梯形臂用于连接横拉杆与立柱的重要结构,其长度也影响到阿克曼转向特性,设计的同时也要考虑到转向过程以免与不等长双A臂悬架结构产生干涉影响转向效率,如图4所示。因此该梯形臂采用的是7075铝合金。7075铝合金抗拉强度为524 MPa,0.2%屈服强度为455 MPa,弹性模量E为71 GPa,硬度为150 HB,密度为2.81 g/cm3。
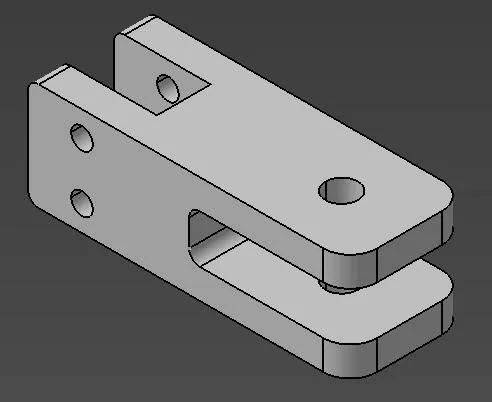
图4 梯形臂模型图
图5、图6、图7分别为ANSYS仿真总形变、弹性形变、等效应力图。图中梯形臂的强度分析使用的是ANSYS静力学分析,由于转向系统在赛车高速运行中一旦遇到不平整的路面、踏上路肩或者遇到突发的状况,所受到的冲击力是正常工况下的4~5倍,确保驾驶员的安全是设计的首要目标。因此在静力学分析中加入的是正常工况下4~5倍的冲击载荷,不难发现梯形臂的等效应力和弹性形变都在安全范围之内。

图5 总形变图(单位:mm)
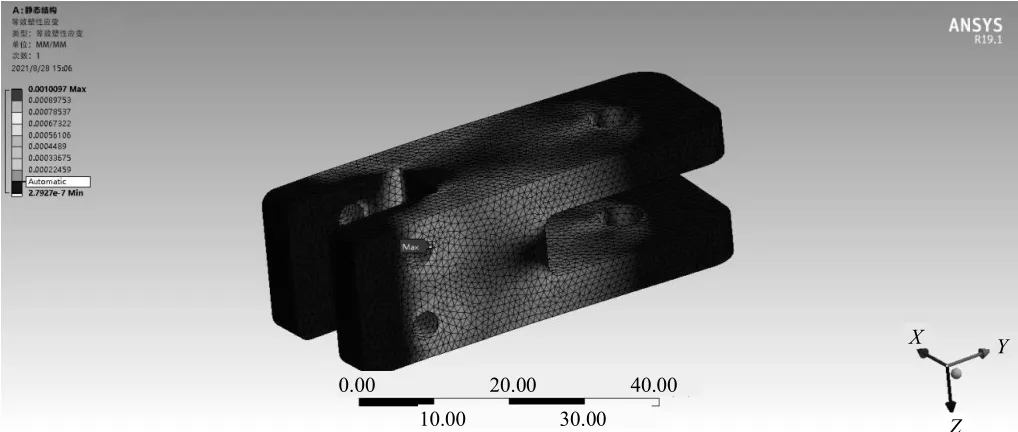
图6 弹性形变图(单位:mm)
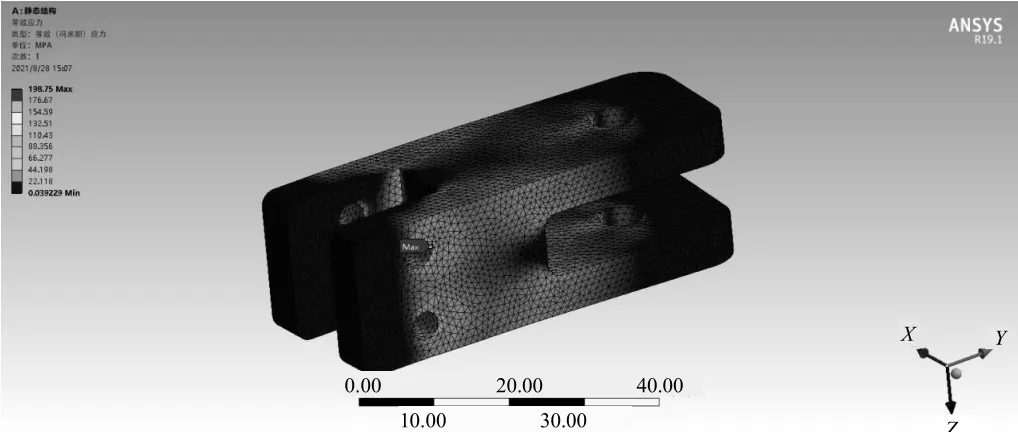
图7 等效应力图(单位:mm)
4.4 转向梯形设计结果
根据上述目标及其约束条件,利用MATLAB和CATIA软件进行建模仿真分析初步确定梯形臂长度的约束范围在45~85 mm,为了保证转向器具有较高的传动效率(一般大于85%),要求齿轮和横拉杆的压力角在任意情况下角度不得大于30°,而且确定横拉杆断开点之间的距离应在410~460 mm范围内。
本转向梯形设计的参数如表2所示。

表2 转向梯形设计参数
5 总结
本文根据广东白云学院电动方程式赛车“E54”转向系统进行设计分析。首先,利用理论知识并结合赛规对赛车基本参数进行设计;然后,利用几何方法对转向系统与悬架系统和车身车架进行匹配防止干涉;接着,对转向梯形进行优化设计,运用CATIA和ANSYS进行建模仿真,其中不断进行修改,保证了其满足强度要求;最后,利用人机工程学对转向系统进行空间布置,从实车测试可看出,赛车在转向操作时,操作稳定性得到了较大的改善,对赛车的制作及比赛具有指导意义。
