矿用自卸车断开式转向梯形设计与运动仿真分析
2016-04-07周新涛马娜盛嘉璐陈经涛于少杰
周新涛马 娜盛嘉璐陈经涛于少杰
(1.西安汽车科技职业学院,西安 710038;2.陕西同力重工股份有限公司,咸阳 712000)
矿用自卸车断开式转向梯形设计与运动仿真分析
周新涛1马 娜2盛嘉璐1陈经涛1于少杰2
(1.西安汽车科技职业学院,西安 710038;2.陕西同力重工股份有限公司,咸阳 712000)
依据转向杆系运动学原理,分析转向内、外轮转角与梯形参数的关系。以实际外轮转角与阿克曼转角偏差最小为设计目标,通过使用数值仿真软件的工具箱函数,对转向梯形主要参数进行优化。将优化所得梯形参数进行运动学仿真分析,得出实际内、外轮转角与仿真分析转角基本保持一致,从而验证了本优化设计方法的可行性。
断开式 转向梯形 优化设计 仿真
引言
车辆转向性能关乎整车的机动灵活性、操纵稳定性和轮胎的使用寿命,在多轴汽车上尤为突出。而对于转向系统的设计,需要优化转向杆系结构来实现最佳的转向过程,即转向时所有车轮都处于纯滚动状态或只有极小的滑移[1-3],以达到减小轮胎磨损和转向阻力矩的目的。目前,在转向杆系的设计领域内,因断开式梯形需要设计的参数较多,采用传统作图法来优化梯形参数已经很难达到设计目标[4]。本文提出了基于数值仿真优化工具箱函数进行梯形参数的多变量多约束的非线性优化计算,并将优化所得参数进行运动仿真,以验证转向梯形数学模型的准确性和优化算法的可靠性。
1 断开式转向梯形设计
1.1 阿克曼转角
一般情况下,两轴汽车的转向通过偏转前轮来实现。为了减小汽车在转向时轮胎的磨损,前轮在路面上应做无滑移的纯滚动,而转动瞬心应在后轴延长线上。此时,前轮内侧车轮偏转角(记为阿克曼内轮转角)α与前轮外侧车轮偏转角(记为阿克曼外轮转角)β应满足阿克曼转角,如公式(1)[5]。
cotβ=cotα+K/L (1)
式中:β为阿克曼外轮转角,α为阿克曼内轮转角,K为两主销中心线延长线到地面交点之间的距离,L为轴距。阿克曼转角关系图,如图1所示。
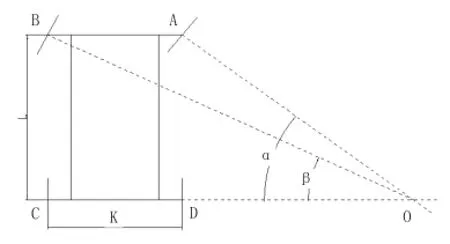
图1 阿克曼转角关系图
汽车在转弯行驶时,理想的阿克曼转角关系几乎是不存在的,而转动瞬心也很难保证在后轴线的延长线上,实际内、外轮转角总与阿克曼转角有一定偏差[2]。因此,在设计转向梯形机构时,需要对梯形参数进行优化计算,使得转向过程中实际内、外轮转角与阿克曼转角偏差最小,以满足轮胎使用要求。
1.2 断开式梯形机构
断开式转向梯形机构,如图2所示。O1、O2分别为两主销旋转中心,梯形O1OBA、O2DCO分别组成了两组转向四杆机构。在右边的四杆机构中,O1O为固定杆,O1A为曲柄,OB为摇臂,AB为连杆;左边四杆机构与右边对称。OBC三点在同一个构件中,该构件连接两组四杆机构,使得车辆转向时,左右杆系具有特定的运动规律。由图2可以看出,决定四杆机构的参数主要有:梯形臂长m;梯形底角a;摇臂旋转半径r;摇臂与梯形固定边夹角b。
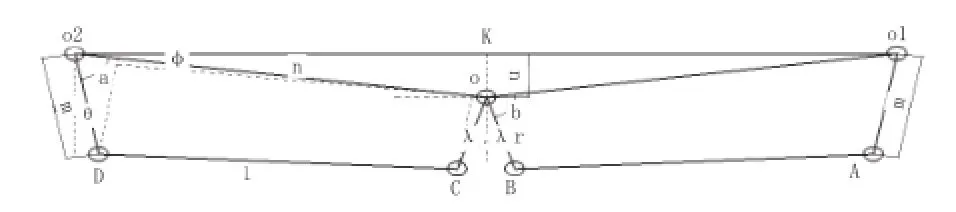
图2 断开式转向梯形
当车辆向左转某一角度时,转向杆系间的运动关系如图3所示。假定O2D逆时针旋转x角度(记为实际内轮转角),则OC、OB随之逆时针旋转t角度,同时O1A逆时针旋转y角度(记为实际外轮转角);车辆向右转时,杆系间的运动关系与左转时刚好相反。
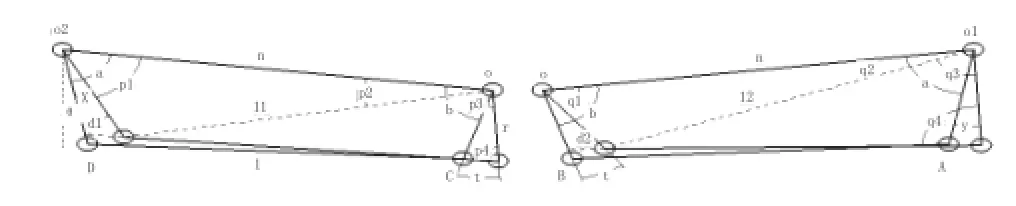
图3 断开式梯形某一转角时的位置
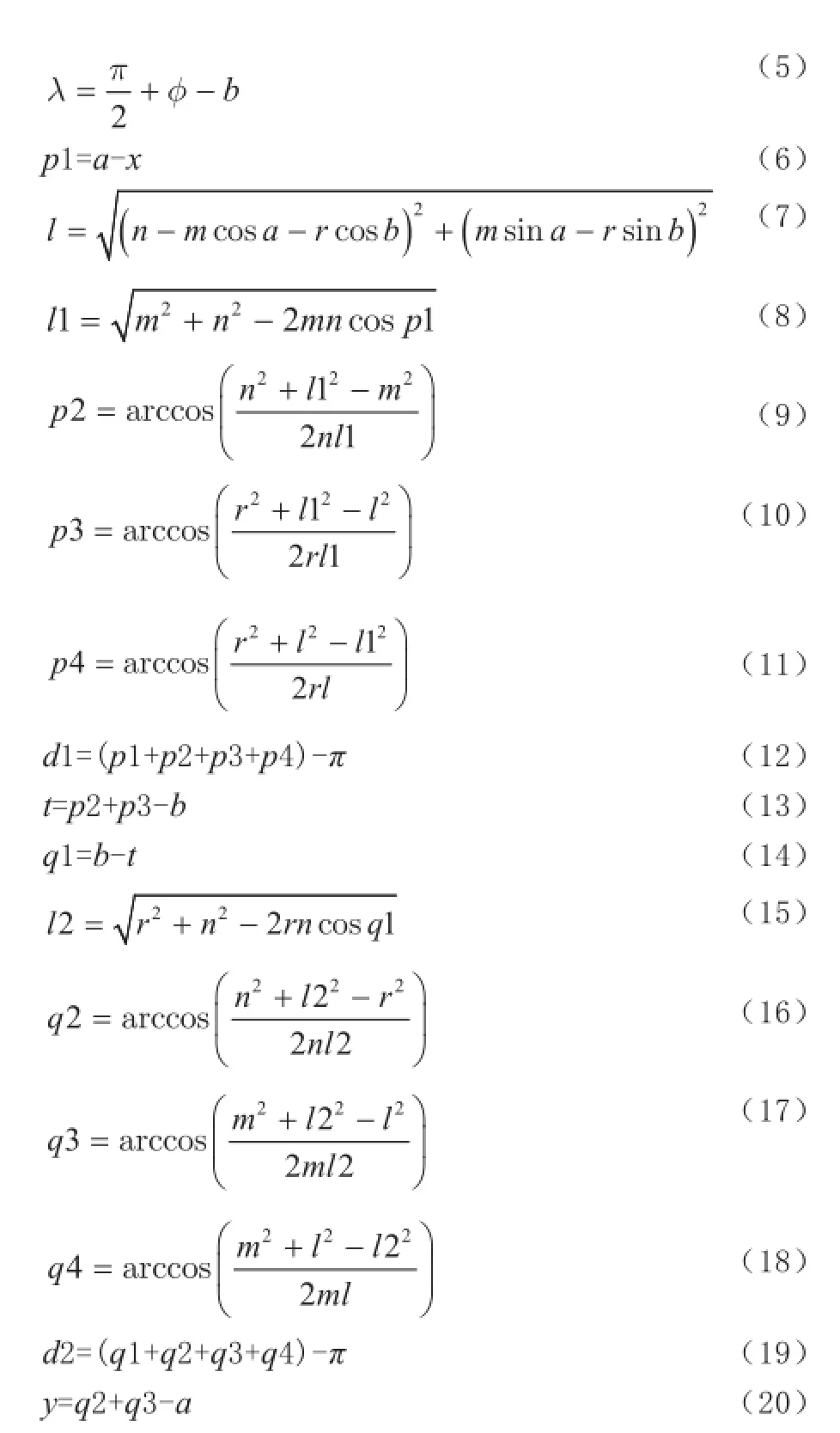
由图3所示的四杆机构运动关系,在已知梯形参数m、a、r、b的基础上,当内轮转角为x时,通过三角函数公式,可以计算出外轮转角y的大小:

1.3 断开式梯形优化
对于断开式转向梯形的优化设计,即要确定最优的梯形参数m、a、r、b。在讨论杆系运动过程中,梯形参数与内外轮转角关系的基础上,将实际外轮转角与阿克曼外轮转角偏差的最小值作为梯形优化的目标,并对梯形参数加以合理的约束条件,即可对其进行参数优化。
为了更好地反映车辆转向过程,在最常使用的小转角范围内的实际转角与阿克曼转角偏差要尽量小,以减小高速行驶时的轮胎磨损;而在不常使用且车速较低的大转角下转弯时,转角偏差可以稍大,以提高转向机构整体性能。因此,评价转角偏差最小的目标函数P中应加入适当的加权因子w(i)[5]。
式中,xi为内轮转角;yi为实际外轮转角;y0i为阿克曼外轮转角。
根据经验,确定梯形参数的初选值a为arctan(4L/3K),且m在(0.11-0.15)K的范围内,x作为输入条件,设x在0°~40°范围内取值。为了使转向杆系在运动过程中不出现死点,内外转向轮最大转角之和应满足条件[3]:xmax+ymax≤70°。
根据转向杆系运动时所建立的内、外轮转角与梯形参数关系的数学模型,实际外轮转角与阿克曼外轮转角偏差最小的目标函数以及杆系运动时的约束条件,利用数值仿真软件的优化工具箱函数fmincon进行转向梯形参数优化[6]。优化结果,如表1所示。

表1 梯形优化结果
2 断开式转向机构仿真分析
将优化所得梯形参数m、a、r、b带入实际转向杆系模型中,再对其进行运动学有限元仿真分析,施加内轮以0°~40°转角,可得出相应外轮的转角大小。
图4所示为阿克曼外轮转角与实际外轮转角随内轮转角的变化曲线,图5所示为阿克曼外轮转角与仿真分析所得外轮转角随内轮转角的变化曲线。由图4、5可以得出,随着内轮转角的增大,实际外轮转角和仿真分析值都在阿克曼转角曲线上方,且保持变化趋势一致。
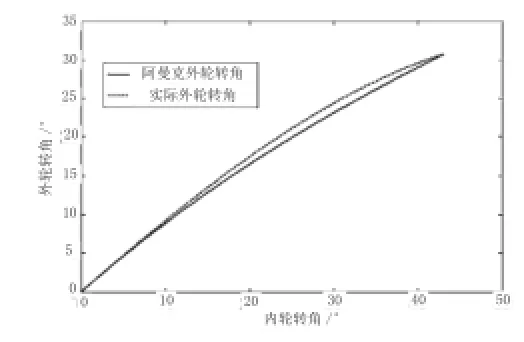
图4 阿克曼外轮转角与实际外轮转角
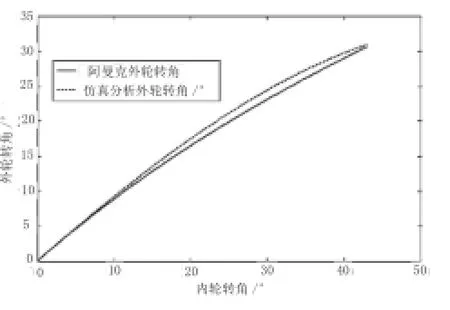
图5 阿克曼外轮转角与 仿真分析外轮转角
在同一内轮转角下,将实际外轮转角与阿克曼外轮转角之差作为实际偏差,将仿真分析所得外轮转角与阿克曼外轮转角之差作为仿真分析偏差。实际偏差与仿真分析偏差随内轮转角的变化曲线如图6所示。由图6可以得出,实际偏差与仿真分析偏差随内轮转角的变化呈二次曲线的变化趋势,在内轮转角为29°时基本都达到最大值,仿真分析偏差略大于实际偏差,两者变化趋势保持一致。图7所示为实际外轮转角与仿真分析外轮转角之差随内轮转角的变化曲线。由图7可以得出,随着内轮转角的增大,此偏差值逐渐变大,但最大偏差仅为0.24°。
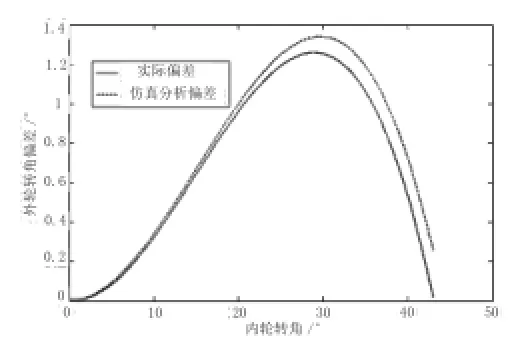
图6 实际偏差与仿真分析偏差
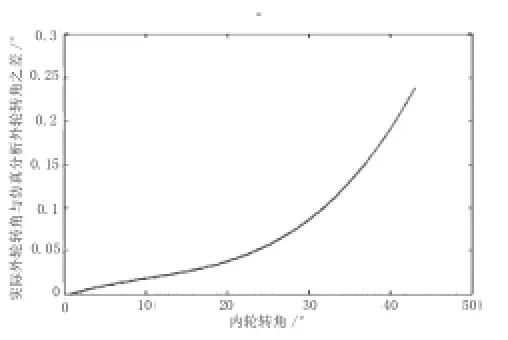
图7 实际外轮转角与仿真分析外轮转角之差
3 结论
本文提出了基于数值仿真软件的优化工具箱函数实现断开式转向梯形参数的设计方法,并通过运动学仿真分析,对设计结果进行了验证,得出了实际内、外轮转角的变化关系与仿真分析结果基本保持一致。此外,在同一内轮转角下,外轮最大转角偏差仅为0.24°,由此验证了本设计方法的正确性和实用性,可供实际设计时参考。
[1]余志生.汽车理论[M].2版.北京:机械工业出版社,1996.
[2]崔亚辉,刘晓林,马超峰,等.多轮重型车辆转向机构的设计分析[J].机械科学与技术,2008,27(8):1052-1055.
[3]刘惟信.汽车设计[M].北京:清华大学出版社,2001.
[4]张德坤,李立顺,孟祥德.基于MATLAB的某特种车转向轮四连杆机构设计[J].专用汽车,2011,(7):64-67.
[5]王望予.汽车设计[M].北京:机械工业出版社,2004.
[6]李军.基于MATLAB优化工具箱的农用运输车转向梯形优化设计[J].农机化研究,2011,33(5):147-150.
Separation Type Steering Trapezium Design and Kinematic Simulatio-n Analysis of the Mining Dump Truck
ZHOU Xintao1,MA Na2,SHENG Jialu1,CHEN Jingtao1,YU Shaojie2
(1.Xi’an Autotechnology Vocational College,Xi’an 710038;2.Shaanxi Tonly Heavy Industries CO.,LTD.,Xianyang 712000)
Based on steering kinematics theory, the relationship between the rotational angle of steering wheel and the parameters of steering trapezium is analyzed. With the minimum deviation between the actual and the Ackerman corners as the design goal, the main parameters of steering trapezium is optimized by using toolbox of MATLAB. Then the simulation analysis of the optimized parameters is made, the consistency of the results is obtained by compared between the actual and simulation corners, and the results verify the feasibility of the optimization design method.
splitting type, steering trapezium, optimal design, simulation
西安汽车科技职业学院科研基金重点项目(2016KJ004)。
