轮径差对有轨电车侧向过岔动力性能影响
2022-09-23赵思琪徐井芒马前涛陈嘉胤王平
赵思琪,徐井芒,马前涛,陈嘉胤,王平
(1.西南交通大学 高速铁路线路工程教育部重点实验室,四川 成都 610031;2.西南交通大学 土木工程学院,四川 成都 610031)
有轨电车作为城市轨道交通运输工具采用槽型轨运行于城市路面,受城市条件限制其线路大多采用小半径曲线。随着有轨电车运行速度的提高和线路曲线半径减小,当有轨电车侧向通过时其轮对受小半径曲线的影响必然导致车轮磨耗急剧增加[1],且两侧车轮受曲线的影响必然存在较大的磨耗状态差异,即会存在不同形式的轮径差状态。而列车为尽可能维持两侧车轮滚动圆半径相等,在运行过程中会逐渐偏向于往小轮径车轮侧横移,导致轮轨接触几何关系发生变化,进而影响车辆运行的安全性和平稳性等。鉴于轮径差对车辆动力学特性的重要影响,许多学者对其展开了研究。陈嵘等[2]研究了高速列车过岔性能受轮径差的影响,并得到同轴轮径差的检修限度范围;蒋益平等[3]研究得到组合轮径差对地铁车辆临界速度的影响极为显著;黄照伟等[4]研究得到随着轮径差的增加,高速列车临界速度逐渐降低,其平稳性和稳定性变差;池茂儒等[5]研究车辆系统稳定性受轮径差的影响,得到为提高车辆系统的稳定性和减轻车轮的磨耗,应尽量减小轮径差,使车辆经常运行于易稳定区;SAWLEY等[6-7]研究了踏面凹磨对轮径差的影响,踏面凹磨将会改变轮径差的倾斜方向,使轮对易产生两点接触,影响车辆的运行稳定性。王红兵等[8]研究了轮径差对车轮踏面磨耗和滚动接触疲劳的影响,得到等值同相轮径差更易导致车轮踏面发生偏磨。CHENG等[9]通过研究提出了轮径差可通过振动对轴箱的影响幅度和频率来诊断的一种检测高铁车辆轮径差的新方法。CHEN等[10]将轮径差对车轮-道岔轨道动态相互作用的影响根据幅值分为3种类型,并提出了相应限值。ZOU等[11]分析了制动工况下轮径差对动态轮轨接触关系的影响,得到轮径差会引起动态制动工况下轮对的局部磨耗后又进一步增大了轮径差。道岔是轨道的薄弱环节,需要采用尖轨及心轨这种特殊变截面钢轨[12],影响行车的平稳性和安全性。有轨电车由于受运行条件的限制,运行的轨道大都采用小号码道岔(即曲线半径小,截面形状变化快),而小号码道岔将严重影响行车安全性[13],导致脱轨事故频发,如图1所示。尤其当有轨电车侧向通过小号码道岔时,易在驶入曲线外轨岔尖处发生脱轨事故,这是由于侧向过岔时,曲线外侧会对轮对产生增载作用且道岔区钢轨截面变化大,轮对状态会发生剧烈变化,列车在过岔时受轮径差存在的影响改变了轮载的横移情况,使得列车在道岔区的轮轨动态相互作用更为剧烈,更易发生脱轨事故,亟需研究不同轮径差形式对有轨电车侧向通过小号码道岔的影响。本文根据某有轨电车及59R2槽型轨3号道岔,在考虑轮径差形式及其幅值大小对道岔区轮轨接触几何影响的基础上,以及团队前期研究建立的有轨电车动力学模型基础上[14],利用多体动力学软件SIM‐PACK建立的有轨电车-道岔耦合动力学模型,计算有轨电车在不同轮径差形式和幅值情况下,侧逆向过岔的动力学性能(包括轮轨动态相互作用、车辆运行的安全性和平稳性),分析轮径差对有轨电车侧逆向过岔性能的影响。

图1 有轨电车脱轨事故案例Fig.1 Case of tram derailmentaccident
1 轮径差类型及运动状态分析
1.1 轮径差类型
由于车轮在实际制造中存在一定误差、运营过程中产生的磨耗以及镟修误差等因素导致列车轮对的轮径相互间存在一定差异,必然产生不同表现形式的轮径差。总的来说轮径差可总结为4种典型组合形式,如图2所示,其中浅色代表小轮径车轮。车轮名义滚动圆半径一般规定为车轮在轮缘内侧70mm处测量所得的半径,轮径差则为左右两侧车轮名义滚动圆半径之间的差值,对于道岔区轮对的轮径差可定义为[2]:
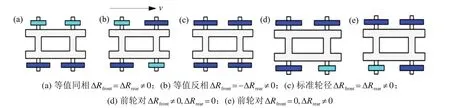
图2 轮径差类型Fig.2 Wheeldiameter difference type

式中:RS为基本轨侧车轮名义滚动圆半径;RW为尖轨或心轨侧车轮名义滚动圆半径。
其中,ΔR>0表示小轮径车轮位于尖轨或心轨侧,反之,ΔR<0表示小轮径位于基本轨侧。
1.2 轮径差运动状态分析
以前轮对轮径差为例,其转向架运动受力分析见图3。对于传统轮对转向架,其轮对左右车轮固结在车轴上,相互之间无法转动,轮对车轮的转动角速度相同。当转向架导向轮对的小轮径车轮位于前轮对右轮时,前轮对运行过程中大轮径车轮(左轮)的线速度将大于小轮径车轮(右轮)侧,即左轮会带动右轮产生相对于钢轨向前的蠕滑,而右轮拖着左轮产生相对于钢轨向后的蠕滑,由此产生纵向蠕滑力[15]。两侧车轮产生的蠕滑力TLx1和TRx1方向相反,且产生的偏转力矩使得轮对产生顺时针方向的摇头,轮对向小轮径车轮方向运动。前轮对顺时针方向的摇头以及向小轮径方向的横移会通过一系悬挂产生悬挂力(FpsLx1,FpsRx1和Fpsy1)带动构架,继而通过后轮对的一系悬挂系统产生悬挂力(FpsLx2,FpsRx2和Fpsy2)带动后轮对向顺时针方向摇头和向右侧横移。
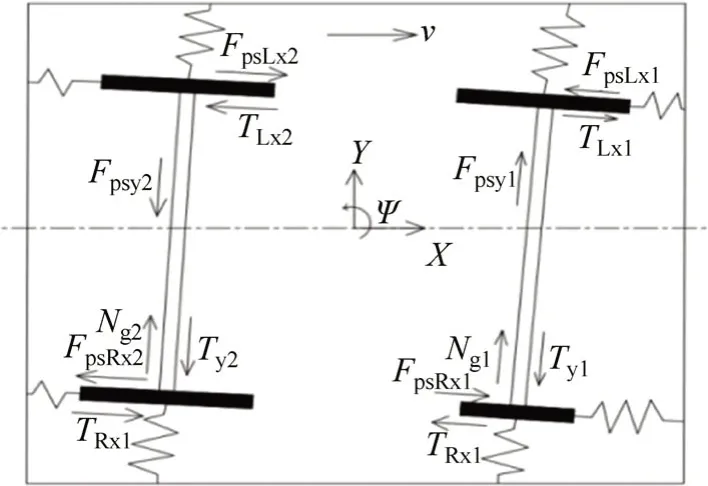
图3 前轮对轮径差的转向架受力示意图Fig.3 Schematic diagram of the force of the bogiew ith the frontwheel towheeldiameter difference
2 轮轨接触几何
计算存在不同轮径差幅值下不同尖轨顶宽在横移量-11~11mm下的轮轨接触点对分布情况。尖轨顶宽分别为25mm和35mm的轮轨接触点对分布如图4所示,其中横移方向以轮对往基本轨侧横移为正。
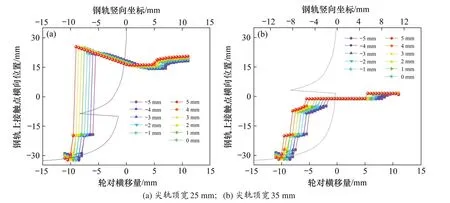
图4 不同尖轨在轮径差下的轮轨接触点分布Fig.4 Distribution ofwheel-railcontactpointsof differentsw itch railsunder the difference ofwheeldiameter
对于尖轨顶宽25mm,标准轮径下接触点分布在基本轨上的横移量范围为-7.5~11mm;当轮径差为2mm和5mm时接触点分布在基本轨上的横移量范围变化为-8~11mm和-9~11mm,可知小轮径车轮位于尖轨侧时轮径差越大轮载过渡位置越延后;当轮径差为-2mm和-5mm时接触点分布在基本轨上的横移量范围变化为-6.5~11mm和-5.5~11mm,可知小轮径车轮位于基本轨侧时轮径差越大轮载过渡位置越提前;这是因为由于轮径差存在,轮对偏向于小轮径一侧,当小轮径位于尖轨侧时,轮对偏向于尖轨侧使得轮载过渡位置延后,同理可知,轮对偏向于基本轨侧使得轮载过渡提前。
对于尖轨顶宽35mm,由图可知轮载过渡已全部完成,接触点分布全部位于尖轨上,且轮径差幅值大小的变化对接触点分布的影响更为显著。当小轮径车轮位于基本轨侧时,轮径差越大,接触点跳跃的位置越提前,反之位于尖轨侧时,轮径差越大,接触点跳跃的位置越延后。
3 有轨电车道岔耦合动力学模型
3.1 车辆模型
仿真车辆模型采用5模块100%传统轮对低地板轻轨车,由5节车体M+F+T+F+M铰接而成(其中,M为动车,F为浮车,T为拖车),其车辆基本参数表见表1,轮对和转向架子结构组成的车辆模型拓扑关系如图5所示。它有2节车体装有动力转向架,1节车体装有非动力转向架[16-17]。
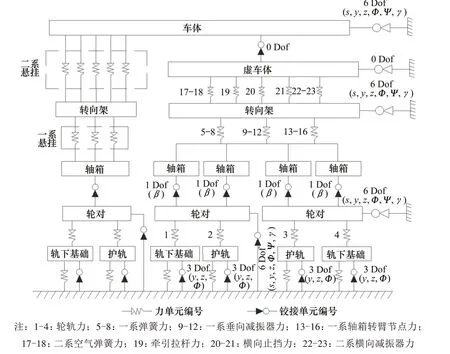
图5 车辆模型拓扑图Fig.5 Vehiclemodel topology diagram
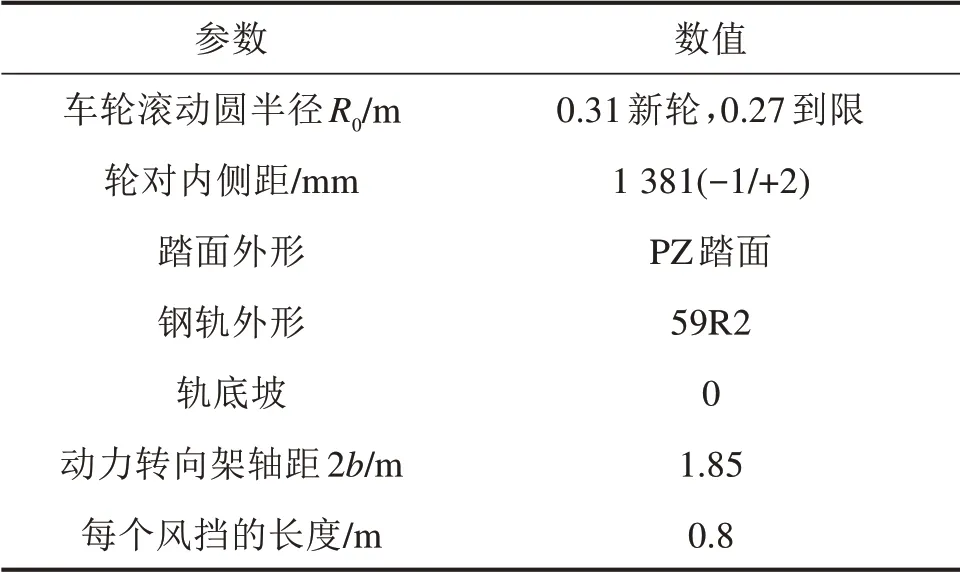
表1 车辆基本参数Table 1 Vehicle basic parameter table
3.2 道岔模型
道岔是变截面模型,在Simpack软件中要实现道岔的建模,首先要考虑道岔沿线路的钢轨廓形变化,选取若干顶宽的道岔截面作为关键截面[18],对关键截面借助CAD对其特定的组合截面廓形进行等距离散化,再采用三次样条插值函数来拟合钢轨廓形,以保证曲线交点处的平滑过渡,然后结合道岔钢轨顶宽变化规律,沿着线路纵向线性插值即可得道岔廓形[19]。如图6(a)所示为按变截面钢轨方法进行插值处理得到顶宽间隔为1mm的若干道岔廓形,再将生成的变截面道岔廓形导入Simpack软件中生成道岔模型,图6(b)为道岔的平面布置图。
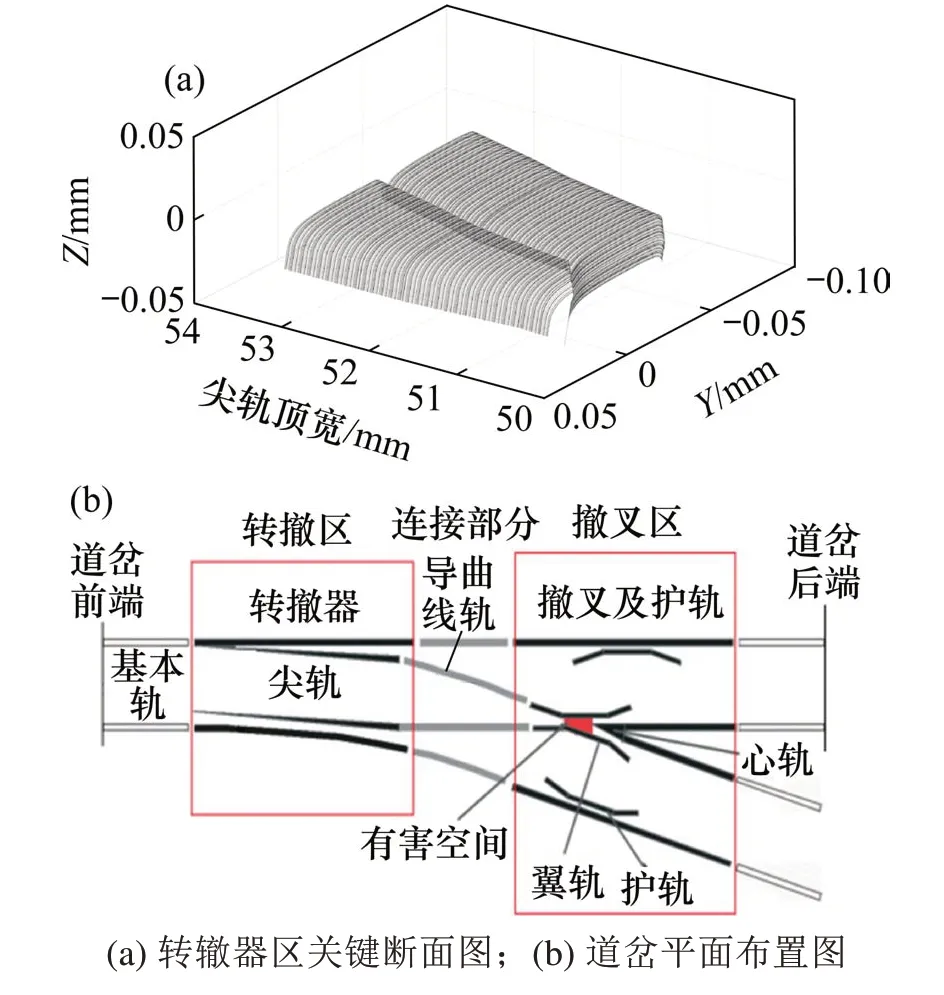
图6 3号道岔示意图Fig.6 Schematic diagram of TurnoutNo.3
3.3 模型验证
为保证结果的准确性,分别对轮径差的设置、车辆模型以及道岔模型进行验证。在轮径差的设置方面,本文计算的不同轮径差对接触几何的影响以及动力学仿真结果与文献[2]一致,但由于仿真所采用的车体模型、踏面及钢轨模型等不同,结果有些差异;本文的车体模型是基于团队前期研究,并通过多体动力学软件SIMPACK建立的有轨电车-道岔耦合动力学模型,其详细车体模型参数见文献[14]。
在道岔模型方面,本文计算有轨电车用标准轮径以速度15 km/h直向通过道岔的动力响应,计算结果所得的轮轨动态相互作用与文献[16]的变化规律与量级等基本一致,其安全性指标与文献[14]中的各项标准对比取得了良好的结果(见表2)。
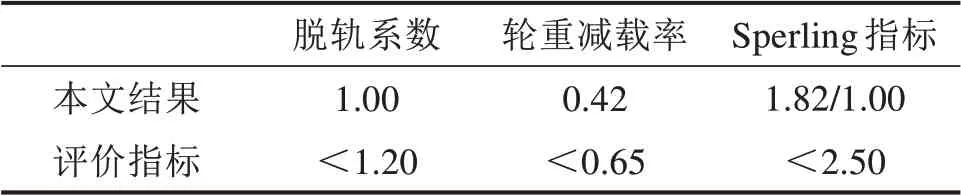
表2 安全性指标对比表Tab le 2 Safety index comparison table
4 有轨电车过岔性能分析
有轨电车道岔侧股经常会出现脱轨事故造成严重影响,且3号道岔的曲线半径特别小仅为25m。本文考虑轮径差类型包括等值同相、等值反相、前轮对及后轮对情况,轮径差幅值范围为0~5mm,研究分析有轨电车以速度15 km/h侧逆向通过3号道岔时前轮对的轮轨动态相互作用、安全性和行车平稳性。
4.1 轮轨动态相互作用
以等值同相轮径差分布为例,展示了有轨电车侧向过岔时的动力学冲击响应时程曲线,如图7所示。
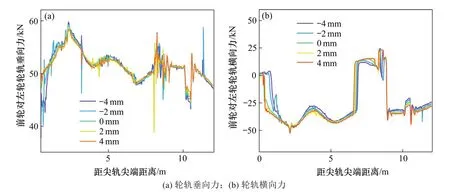
图7 等值同相轮径差形式下轮轨动态相互作用Fig.7 Dynam ic interaction between wheeland rail in the form of equivalentwheel diameter difference
对于不同轮径差类型的轮轨垂向力见图8(a)。等值同相轮径差由于前后轮对的横移方向相同,对尖轨侧的轮轨垂向力最大值影响很小。由于等值反相轮径差的存在使得前后轮对的横移方向相反,对两侧钢轨的轮轨垂向力最大值影响较为显著,对于尖轨侧随着轮径差由-5~5mm,轮轨垂向力最大值逐渐减少48.89%,基本轨侧则增大了111.74%。前轮对和后轮对2种轮径差形式的影响规律基本呈反相关变化,其中后轮对轮径差对轮轨垂向力最大值的影响较大。
对于不同轮径差形式下的轮轨横向力见图8(b)。等值同相轮径差对尖轨侧的轮轨横向力最大值影响很小,但当轮径差为0.5mm和1mm时比标准轮轨横向力最大值有突变性的增大,即分别增大了39.84%和68.66%,这是由于小轮径车轮位于尖轨侧时轮对在行进过程中逐渐向尖轨侧横移,当横移量达一定值后基本轨侧的车轮发生轮背接触导致轮轨横向力突增。
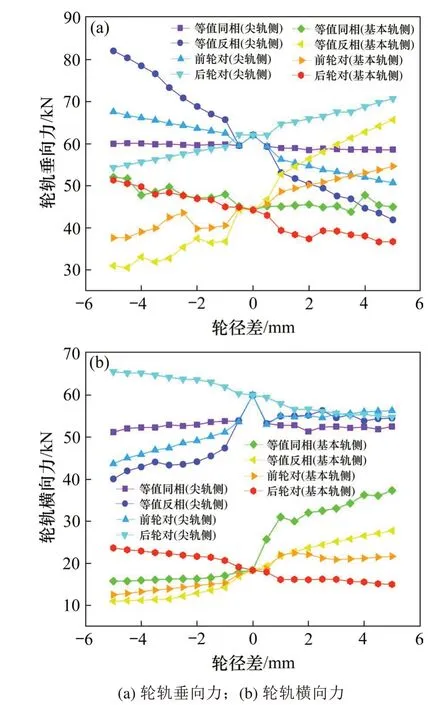
图8 不同轮径差形式下轮轨动态最大值变化规律Fig.8 Wheel-raildynam ic peak changesunder different wheel diameter differences
等值反相轮径差随着轮径差由-5~5mm变化,尖轨侧轮轨横向力最大值总体呈增大趋势,但是当轮径差分别为0.5mm和-0.5mm时,轮轨横向力最大值相对于标准轮径有较大幅度的减小。以等值反相0.5mm轮径差为例:当前轮对的小轮径位于尖轨侧时前轮对有向尖轨侧横移的趋势而后轮对的小轮径此时位于基本轨侧,即后轮对有向基本轨侧横移的趋势,前后轮对有相反的横移方向,在相互作用下抵消了一部分作用力导致尖轨侧的轮轨横向力最大值比标准轮径的小;基本轨侧由于轮缘槽的存在限制了车轮的横移,当基本轨侧车轮出现轮背运动,轮轨横向力逐渐增大。小轮径位于基本轨侧时,随着轮径差的增大车轮有向基本轨侧的横移,使得轮轨横向力最大值逐渐减小。
前轮对轮径差对两侧钢轨轮轨横向力最大值的影响规律与等值反相类似,但其影响幅度较小。后轮对轮径差对尖轨侧的轮轨横向力最大值的影响总体大于其他轮径差形式的轮轨横向力。由于当小轮径车轮位于基本轨侧时,列车在运行过程中后轮对会逐渐向基本轨侧横移,后轮对又会通过悬挂系统带动前轮对向尖轨侧横移又不至于使基本轨侧发生轮背运动,故后轮对轮径差的存在会导致前轮对尖轨侧轮轨横向力最大值的增大。
4.2 车辆安全性评价
由于3号道岔曲线半径极小仅有25m,故有轨电车侧向入岔易产生较大冲击,且轮径差的存在加剧了轮轨动态响应,增大了列车的脱轨风险,故研究有轨电车侧逆向通过道岔区的安全性极为必要。
不同轮径差类型下的脱轨系数如图9(a)所示,尖轨侧脱轨系数总体大于基本轨侧脱轨系数,且轮径差的存在对尖轨侧脱轨系数幅值的影响更大。等值同相轮径差脱轨系数与等值同相轮轨横向力分布规律原因相同,故不再赘述。等值反相轮径差为3~5mm时其脱轨系数偏大均超过1.2,此时列车已存在严重的爬轨脱轨隐患;当小轮径车轮位于基本轨侧时轮径差的存在使得脱轨系数减小,这是因为车辆在行驶过程中由于轮径差的存在往内轨(基本轨侧)横移,减小了车辆侧向通过时对外轨(尖轨侧)的冲击;当小轮径车轮位于尖轨侧时,轮径差的存在使得脱轨系数增大,其原理与上述相同。前轮对轮径差脱轨系数的分布规律与等值反相基本一致,但其幅值变化较小。后轮对轮径差对尖轨侧脱轨系数影响较大,当轮径差为-5mm时的脱轨系数偏大为1.23,此时列车存在脱轨的安全隐患。
不同轮径差类型下的轮重减载率如图9(b)所示。对于等值同相轮径差,当小轮径位于基本轨侧时两侧钢轨的轮重减载率随轮径差幅值的增大而增大,其中对尖轨侧的影响更大。等值反相轮径差两侧钢轨的轮重减载率则大致呈反相关,其中对基本轨侧的影响较大,当小轮径位于尖轨侧时,基本轨侧的轮重减载率随轮径差幅值的增大而增大,当轮径差为-5mm时其轮重减载率达到0.64,此时有轨电车没有充足的安全裕量,存在较大的安全隐患。前轮对轮径差对两侧钢轨的轮重减载率影响则相对较小。后轮对轮径差的小轮径位于基本侧时,随轮径差的增大轮重减载率有较大的增大,当轮径差为-5mm时其轮重减载率达到0.67,列车会存在因轮重减载过大而可能会引起脱轨等的安全事故。
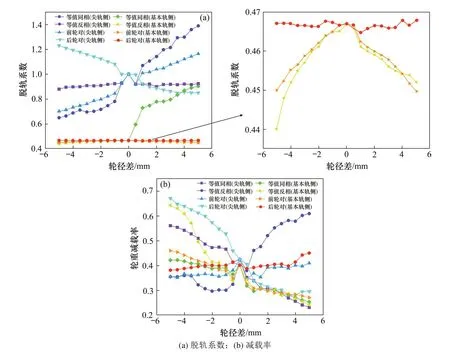
图9 不同轮径差形式下脱轨系数及减载率Fig.9 DerailmentcoefficientandWheel load reduction rate under differentwheeldiameter differences
4.3 车辆平稳性评价
由于有轨电车侧向过岔易产生较大冲击导致有轨电车运行不平稳出现蛇行运动等,又因为轮径差的存在加剧了这种情况的产生,通过Sperling平稳性指数反映有轨电车在不同轮径差形式及幅值下横向和垂向的平稳性情况如图10所示。
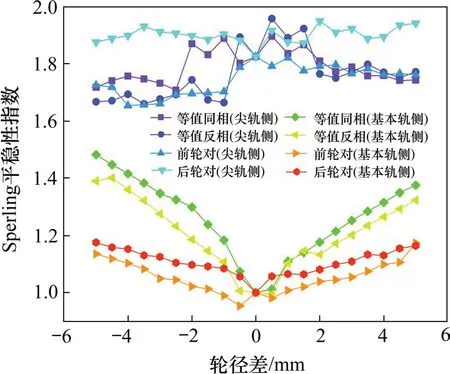
图10 不同轮径差形式下Sperling平稳性指数Fig.10 Sperling stability index under differentwheel diameter differences
对于等值同相轮径差,横向Sperling指数随轮径差的增大有先增大后减小的过程。这是因为刚开始由于轮径差的存在使得有轨电车侧向过岔的不平稳性增大,但当轮径差达到一定值后,小轮径位于尖轨侧时由于槽型轨轮缘槽的存在限制了轮对的横向位移使得后面的Sperling指数趋于稳定。当小轮径位于基本轨侧时由于轮对倾向于往内轨(基本轨)侧横移,减小了对外轨(尖轨)侧的冲击。等值反相轮径差横向Sperling指数与等值同相类似,不再赘述;前轮对和后轮对轮径差,横向Sperling指数基本呈反相关变化,前轮对轮径差随轮径差的增大而逐渐减小,是因为前轮对轮径差的存在会导致基本轨侧出现轮背运动,限制车辆的横移;后轮对轮径差不会发生轮背运动,导致后轮对轮径差的存在对前轮对的影响更为剧烈,平稳性变化较大。
不同轮径差形式下的垂向Sperling指数,均随轮径差的存在其垂向平稳性指数增大,其中等值同相和等值反相的垂向Sperling平稳性指数随轮径差幅值的增大而有较为显著地增大即等值同相和等值反相对有轨电车侧向过岔的垂向平稳性影响较大。
5 结论
1)在同一横移量情况下,小轮径车轮位于基本轨侧时,会导致尖轨轮载过渡位置提前或使其轮轨接触点跳跃位置提前;当小轮径车轮位于尖轨侧时,轮径差幅值的增大会导致其轮载过渡位置的延后以及接触点跳跃位置延后。
2)等值同相分布对有轨电车侧向过岔的动力学性能影响较小,当轮径差较小时,由于基本轨侧发生轮背运动,其轮轨横向力和脱轨系数有个跳跃性的增大,车辆过岔的安全性下降易发生失稳;初始由于轮径差的存在横向Sperling指数会有较大增大,当轮径差增大到一定幅值后,轮背运动的发生会限制轮对的横向位移使得横向平稳性指数趋于稳定。
3)等值反相分布对有轨电车侧向过岔的动力学性能极为不利,当轮径差幅值大于3mm后,脱轨系数均大于1.2,列车存在严重的爬轨脱轨隐患易发生安全事故,轮径差幅值大于4mm后,轮重减载率均大于0.6,没有足够的安全裕量,易发生脱轨事故。
4)后轮对轮径差分布的存在使有轨电车侧向过岔有极大的安全隐患,后轮对轮径差的存在会导致前轮对尖轨侧的轮轨横向力整体处于一个较大值,不利于列车的平稳性;当轮径差为-5mm时,其脱轨系数和轮重减载率分别达到了1.23和0.67,有轨电车此时极易发生爬轨或脱轨事故,且其横向Sperling指数偏大,即后轮对轮径差幅值到一定值后对有轨电车的安全性和平稳性都极为不利。
