舰面光电制导设备远程激光测距技术问题研究
2022-09-22张小龙徐广平曹昌东
张小龙,徐广平,曹昌东
(中国电子科技集团公司第十一研究所,北京 100015)
1 引 言
在现代海战中,面对日趋复杂和恶劣的电磁环境以及反辐射导弹的重大突防威胁,无线电雷达跟踪探测设备往往难以正常发挥作用。在此背景下,研制和发展新的探测跟踪手段和设备以弥补雷达探测跟踪设备的不足成为客观而紧迫的需求。根据舰面光电制导设备战场作战需求,光电制导设备以抗干扰能力强、隐蔽性好、跟踪精度高、实时性好等特点在目标预警与探测等方面均发挥至关重要的作用,近年来不断装备各类反导拦截系统中。
激光测距机作为光电制导跟踪设备核心组件,完成对来袭目标、作战飞机等快速机动目标距离实时精确测量,为光电制导跟踪设备完成目标拦截的精确引导提供参数依据。
2 激光测距机工作原理及工作时序
激光测距的工作体制基本可分为直接探测、单光子探测、相干探测和量子探测等体制。其中直接探测体制为目前技术成熟度高且为现阶段最主要的探测体制。该问题针对传统的直接探测体制的激光测距技术进行问题研究。下面就该体制的工作原理和测距时序进行介绍。
如图1所示为直接探测体制的脉冲激光测距机工作原理。
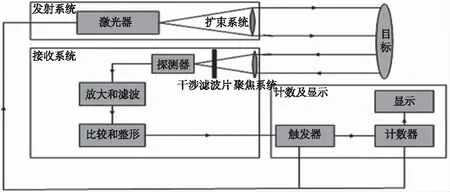
图1 激光测距工作原理图
激光测距机在收到光电制导系统的测距时统命令后,启动激光发射,由激光发射系统(激光器+扩束系统)对被测目标发射一个激光脉冲并经被测目标反射后,到达测距机接收系统接收到目标反射回来的激光脉冲,进入激光测距机接收光学视场,在接收光学后端的光电探测器探测到目标回波信号后经过数字化至信号处理电路进行相关算法处理,并将测距结果上报给光电制导设备上位机,由光电制导设备进行数据融合后上传至拦截处置系统,从而对目标拦截进行实时精确引导和轨迹修正。
3 舰载光电应用系统中的远程激光测距问题分析及解决方法
舰面光电制导设备远程激光测距技术需要解决在远程、快速、低空小目标的回波信号稳定、精确提取,必须使微弱信号具有极高信噪比和极低的虚警率。目前国内在该领域技术基础相对薄弱,作用距离近、杂波处理能力弱,难以满足作战应用需求,因而需解决高峰值功率激光器技术、超低空高速运动小目标海面杂波抑制技术[2]、远程激光测距全天时、全天候高灵敏度探测等重要技术问题,以实现舰面光电系统工程化激光测距设备。
3.1 海洋大气环境下的复杂海面背景及超低空海面杂波特性研究
通常在陆地大气环境条件下,大气湿度小、颗粒浓度低,大气衰减和散射都相对不算强烈。但在海洋大气环境尤其是低空大气环境下,激光光束传输吸收衰减非常严重,发射光束引起的后向散射非常强,且在海面低空传输时存在多路径效应等问题。因而实现舰面系统远程激光测距机需解决在该大气环境下的激光传输效应问题,方可实现工程应用。
总的大气衰减系数σ由分子散射系统σm、分子吸收系数Km、气溶胶散射系统σa、气溶胶吸收系数Ka构成。海洋大气环境的气溶胶以雾、霾、雨和水汽为主。舰面设备激光系统的散射为低空散射,以米氏散射为主,其模型如下:
σa=N(r)·πr2·Qs
其中,N(r)为单位体积中的粒子数;r为粒子半径;Qs为散射效率,粒子散射的能量与入射到粒子几何截面上πr2的能量之比。表1为能见度5 km大气悬浮粒子散射系数。

表1 能见度5 km下大气悬浮粒子散射系数
从表中可以看到,选取1.06 μm波长激光的大气散射影响相对较小,但在海洋大气尤其是能见度条件下的高功率激光光束的大气散射影响还是比较大的。根据《电光学手册》,大气后向散射强度为:
其中,Ld为散射辐亮度(W/(m2.Sr);I为激光照射强度(W/Sr);σ为大气衰减系数;G为反向散射增益。
根据散射强度公式可知,后向散射强度除与激光发射功率密度相关外,还和大气衰减及散射增益相关。因此在海面环境下的低能见度下高功率激光光束的后向散射强度有效抑制是提高测距系统探测灵敏度和降低虚警率的一个重要环节。
海面背景光照情况也比较复杂,光电跟踪系统在各种方位俯仰方向上运动时,激光测距接收光学系统接收到的背景光强度差别很大,这就导致探测器背景噪声强度和频谱特性差异很大。加之在复杂海面背景及大气湿度条件下的强后向散射也较为严重。图2所示为通常情况下的海面背景和后向散射波形。
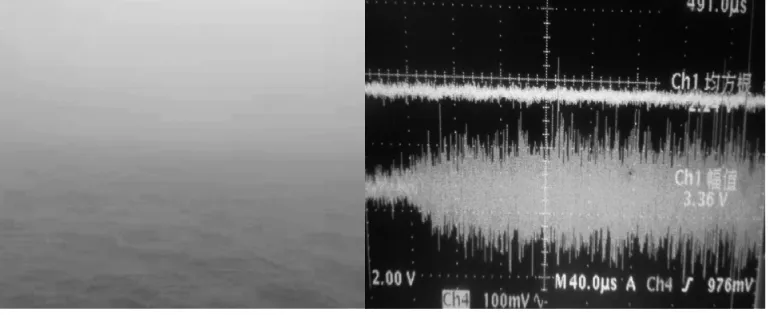
图2 海面背景情况下探测器的后向散射图
TPG电路是用来抑制近距离的后向散射[3]。如图3所示为TPG控制后问散射抑制时序图。在测距系统中,当距离比较近时,激光被大气反射形成较强的后向散射,如果此时放大器的增益比较高,那么将导致大量的虚警。另外在对近目标测距时,由于回波比较强,高增益将导致放大器严重饱和,使测距精度降低。所以放大电路的增益必须可控。当发出激光,及产生主波时,放大器处于低增益状态,随着距离的增加,放大器增益逐步变高,在远距离时达到最大增益。
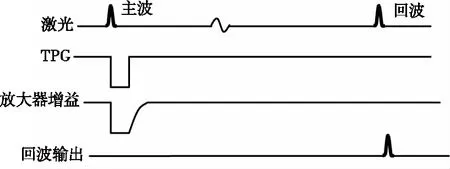
图3 TPG控制后向散射抑制时序图
在通常大气条件和较小激光脉冲功率情况下,抑制近距离的大气后向散射用TPG控制已经能够实现抑制近距离散射引起的噪声起伏,即满足应用需求。但在海洋大气条件下,尤其是能见度较低情况下的大气粒子浓度急剧上升后,在高峰值功率激光发射后,形成较强的后向散射,甚至可以导致探测器接收饱和,在较远距离的目标回波返回后,探测器无法响应,或者现有距离计数器容量无法对真正的目标回波进行存储和后处理[4]。
该项目中通过采用回波信号强度分段直方图统计,并进行梯度时间增益检测门限调节信号处理算法结合硬件实现。图4为梯度时间增益检测门限动态调节处理算法效果图。
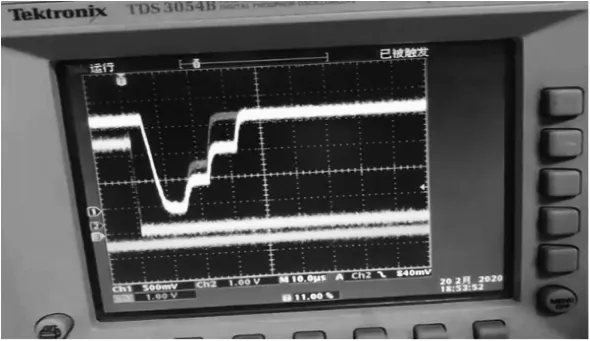
图4 梯度时间增益检测门限动态调节
动态检测门限电平调节是在对一段距离(时间)内的后向散射脉冲个数进行统计后,根据统计结果在尽可能不降低检测信噪比的条件下进行实时调节检测电平,以使后向散射脉冲个数不足以填满距离计数器且能满足一定虚警率(1 %)的要求。
进行强背景噪声抑制和动态检测门限调节,不但提高了回波信号探测的信噪比,也解决了在复杂海面背景情况下强背景噪声的强后向散射带来的噪声强度饱和而导致的无法进行高灵敏度回波信号探测和提取问题,实现了大动态范围回波信号全测程范围内的恒虚警控制。
3.2 激光测距全天时、全天候高灵敏度探测技术
实现激光测距机在海面应用条件下全天时、全天候工作,是该项目高灵敏度探测的重点,因此需要从以下两个方面解决。
(1)大动态范围回波信号全测程范围内的恒虚警控制
常规的回波阈值检测门限是单靠一个电位器分压电平来调节,这样不论在白天还是夜晚的等各种不同的背景噪声情况下是一个固定阈值门限检测电平。在这种情况下如果亮背景情况调节的阈值门限在暗背景情况下探测灵敏度度闭环调节到较高水平时就会出现虚警,同理在暗背景情况调节的阈值门限在亮背景情况下探测灵敏度度闭环调节到较低时就会出现探测能力损失。通过双路闭环检测数字自适应调节技术,可实现在各种背景条件下,探测器高压自适应调节达到合适的探测灵敏度,同时回波阈值检测门限根据该探测灵敏度条件下自适应调节到最佳的阈值检测门限电平,即在不出现虚警情况下又能达到最高的检测阈值门限电平,实现大动态范围回波信号全测程范围内的恒虚警控制。如图5所示为双路闭环自适应调节技术实现方案。
图5 双路闭环自适应调节示意图
(2)大动态范围回波信号全测程范围内的恒虚警控制
常规测距机在测距时一般发射半宽约6~8 ns左右的单脉冲激光,激光回波经放大后采取定阈值比较的方法提取出距离信息。在此方法下降低阈值门限,将使检测灵敏度提高,但降低阈值门限将会导致大量虚警产生。通过多帧相关算法可以剔除虚警,获取真实的目标距离信息,所以采取多帧相关算法时,能降低阈值门限,即能提高测距灵敏度。如图6所示为MRMF相关原理图。其算法实现思想如下:在测距过程中,取出N帧连续的测距数据进行相关比较,当有不小于m(1 图6 MRMF相关原理图 舰面设备对空目标进行激光测距时,由于海面高空大气湍流和扰动效应,加之动态目标飞行情况下的对激光回波信号的目标特性变化,在高灵敏度探测条件下激光测距回波距离数据会出波动较大的情况,从而导致激光测距距离的误差波动较大[5]。如图7为在海洋大气条件下,飞行高程6 km的典型飞机的激光测距距离数据。选取目标在40 km附近100个实测测距数据作为样本,在算法处理前后的测距典型数据波形如图7(a)和图7(b)所示。 图7 高空动态目标激光测距典型数据波形图 通过选取的40 km距离段的100个距离值可以看出,在某一随机时刻回波距离抖动较大,最大达250 m,远超出了激光测距距离精度要求。 针对该问题提出了频步加权门限距离外推处理算法,即根据上述多帧相关算法的基础上,进一步细分匹配距离波门,根据激光工作频率和目标速度匹配关系,将距离检测波门收窄在极小并且分档的范围内,例如:将多帧相关算法改为新进入测距距离值与第5帧匹配距离为50 m、第4帧匹配距离为100 m,和第3帧匹配距离为150 m,和第2帧匹配距离为200 m,和第1帧匹配距离为250 m。 算法处理前后的测距数据波动情况如图8(a)和图8(b)所示。 图8 算法处理后测距数据波动图 改进的算法可抑制大范围的距离误差波动,提升测距距离精度,大幅降低数据误差,提高数据可靠性,由图7、图8对比可知,测距数据误差由原来的不大于250 m改进至不大于50 m,满足系统测距精度要求。 通过程序更改前后的对比试验可知,程序更改后数据误差明显变小,数据精度得到显著改善,考虑到激光测距使用的场景多为目标进入模式,即目标离观测点越来越近,此种算法有利于总体判断距离是否为虚警,提高上报距离数据的可靠性。 本文基于舰载光电应用系统中的远程激光测距系统在工程应用中出现的典型问题进行分析,提出相应的多帧多回波(MFMR)相关处理、数字闭环自适应等软硬件解决方案,能够有效的提升激光在海洋大气条件下对小目标探测的灵敏度,降低了检测虚警率,解决了海杂波背景下回波信号提取等难题,较好的实现了舰面光电远程激光测距技术的工程应用。
3.3 动态飞行目标激光测距回波距离数据波动性研究
4 结 语
