一种多功能半自主遥操作的履带式消防机器人控制系统设计
2022-09-22熊鹏文尚志军
赵 琪,张 华,熊鹏文,尚志军
(南昌大学江西省机器人与焊接自动化重点实验室,江西 南昌 330031)
1 引言
近年来,火灾、爆炸等安全事故频发于工厂、仓库、楼宇等地,给人们带来巨大危害与损失。目前国内外已研制出用于核工业检测,煤矿厂等有毒、易燃气体场所探测,火场消防的移动机器人,但上述用于特定环境的机器人通常功能单一,控制策略陈旧,自动化程度低。随着计算机科学以及智能控制技术的发展,智能机器人的实现已成为可能,各国都加快将智能控制技术应用于移动机器人的研制上[1]。由此设计了一种集火场气体探测、无线遥控、自主避障、自我保护、消防等功能为一体的智能消防机器人。
消防机器人的工作环境往往存在很多障碍物,也可能存在有毒、易燃、腐蚀性的气体、液体,而过去设计的消防机器人较多依靠可靠的机械结构,和人工遥控来实现机器人的避障、喷水和保护机器人[2]。针对此,本设计改进了传统控制策略,设计思路是:将模糊控制应用于机器人的移动避障,在无人干预的情况下机器人自主移动并探测,还能根据环境情况,自动选择喷洒水、干冰或泡沫等不同灭火剂,在环境过于复杂或其他必要情况时,又可切换成人工遥控模式。
2 控制系统组成
2.1 功能介绍
机器人主要功能:(1)实现移动平台运动控制、水炮仰俯及横摆控制,保证各部分电机的协同工作;(2)能够实现温度、超声和气体检测等传感器的信号采集与处理。探测火场内辐射热、有毒及易燃气体种类和浓度;(3)根据探测出的环境情况,选择不同灭火剂进行灭火、冷却、稀释、隔离等消防操作;(4)通过无线图传将实时检测到的图像传回控制台,再通过无线数传实现检测数据的回传,以及控制命令的发送;(5)本体具备安全保护功能,在易燃易爆环境中防火防爆,在高温情况下本体洒水冷却。
2.2 系统总体方案结构
整体的控制系统,如图1所示.主要包括上位机和机器人本体,其中机器人本体包含:移动平台、感测系统、水炮云台、无线通讯模块、保护机构等[3]。
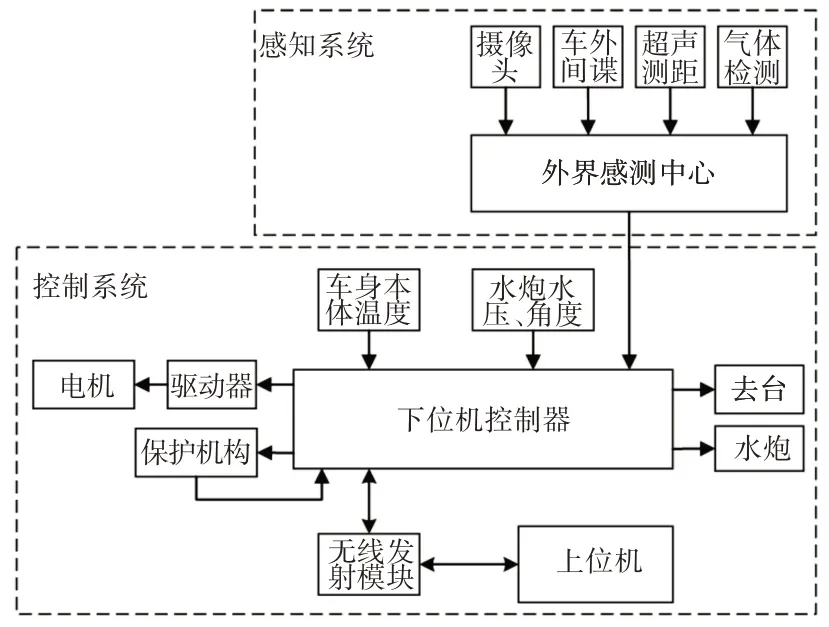
图1 总体系统方案结构图Fig.1 Overall Scheme Structure Diagram of the System
3 机器人本体控制系统设计
机器人本体控制系统设计分为硬件设计、软件与算法设计。嵌入式系统具有体积小、灵活性高、可靠性好的特点,便于多种接口通信,使其成为本设计首选。
3.1 硬件设计
机器人本体的控制器主板选用以STM32F407芯片为核心,通过I2C、SPI、USART、普通IO口等接口读取各类传感器,来获得内外温度、障碍物距离、气体浓度、水炮水压等信息;通过IO口发送控制信号给驱动器,以控制移动电机以及云台、水炮的电机;通过USART与无线传输模块相接,实现无线传输。电源部分,选用CH340G 芯片,将USB 接口转换为异步串口,同时提供5V 电源,再通过线性稳压芯片SPX5205M5-3.3,将5V电源降为纹波小于40uV的3.3V电压,为单片机、传感器和无线传输模块供电[4]。无线传输部分,数传模块选用高性能LoRa扩频芯片SX1276,采用高效的循环交织纠检错编码,抗干扰和灵敏度都大大提高,LoRa扩频技术配合吸盘式天线,能够带来更远的通讯距离;图传模块选用AOMWAY 5.8G 1W无线图传,32频点接收带DVR功能,与其相配合采用700线高清镜头,150°广角。
为方便后续实验验证,我们制造了样机,样机内部硬件结构的俯视图,如图2所示。
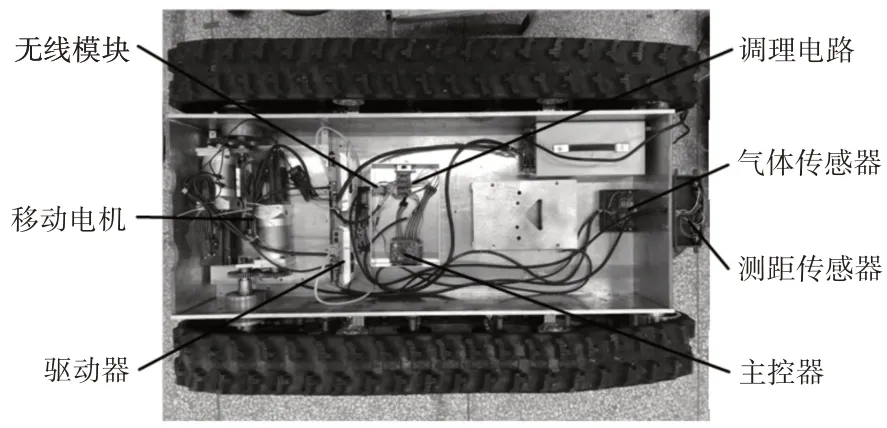
图2 样机内部俯视图Fig.2 Vertical View of the Prototype
3.2 软件与算法设计
控制器主板的软件编写在Keil 5环境下,使用C语言编写控制程序。系统控制程序的流程,如图3所示。
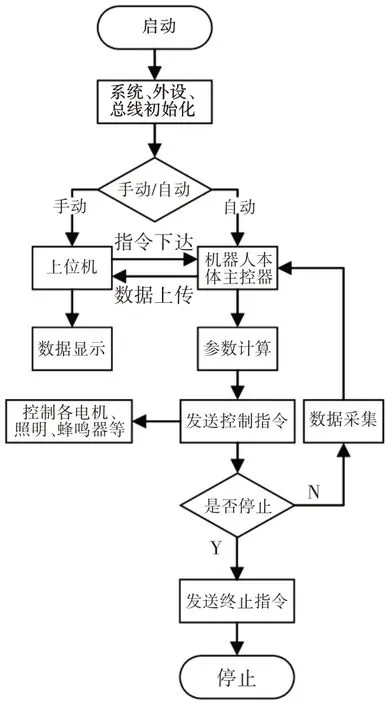
图3 系统控制流程图Fig.3 Control Flow Chart of the System
系统在上电后,会根据指令选择人工控制模式或者自动控制模式。人工控制模式就是把上位机作为操作台,手动输入各种指令,下发给本体控制器来控制各外部设备,上位机界面用Lab⁃view软件编程,具有界面显示和串口数据发送功能。自动控制模式是机器人本体自主前进、探测、避障、决策等,即传感器采集各类信息,经过数据处理、参数计算后,得出控制指令,控制本体移动、水炮转向或喷水、云台升降,或实施保护措施、预警措施等[5]。其中数据处理采用了最小二乘法进行滤波和补偿,避障采用模糊控制算法。
3.2.1 各部分软件设计
包括传感器读取、数传图传、电机控制、保护预警等。采用轮询法依次读取传感器检测的数据,依次读取温度值、车体各方向距离值、气体浓度值、转动角度值等,数据经过处理后,以数组形式保存在下位机内存中。传感器数据与CCD相机采集的图像分别用两路通道进行无线传输。前方有障碍物时控制移动电机避障或者越障,车体温度过高时控制水炮喷水冷却。
3.2.2 数据处理
传感器采集的数据总会与真实值存在误差,这里采用了最小二乘法进行滤波和补偿。为方便计算,本设计采用基于实际测量值的相对误差最小进行处理,可以表示为:

测量值和实际值常为线性关系,其之间可以表示为:

相对误差最小二乘法可以表示为:
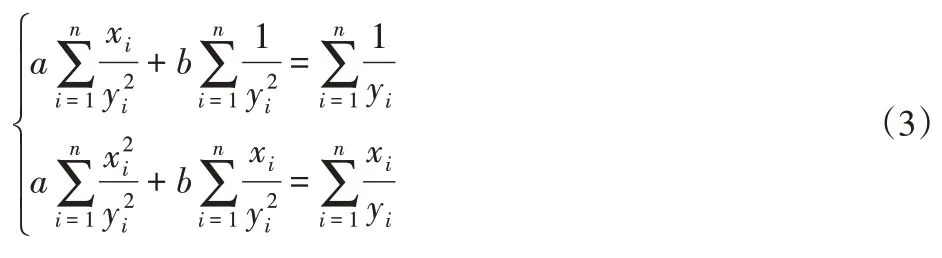
式中:n—测量的次数。
3.2.3 参数计算
本体移动是设计的重点,下面主要介绍测距参数的计算。测距传感器在探测障碍物距离时,若障碍物较大,可能会被多个传感器检测到,导致得出多个距离值,为确定所需的距离值,这里采用信息融合技术。选测得距离值最大的相邻的两个传感器,设为A、B,假设这两个模块的超声波被同一点O反射,建立坐标系,如图4所示。
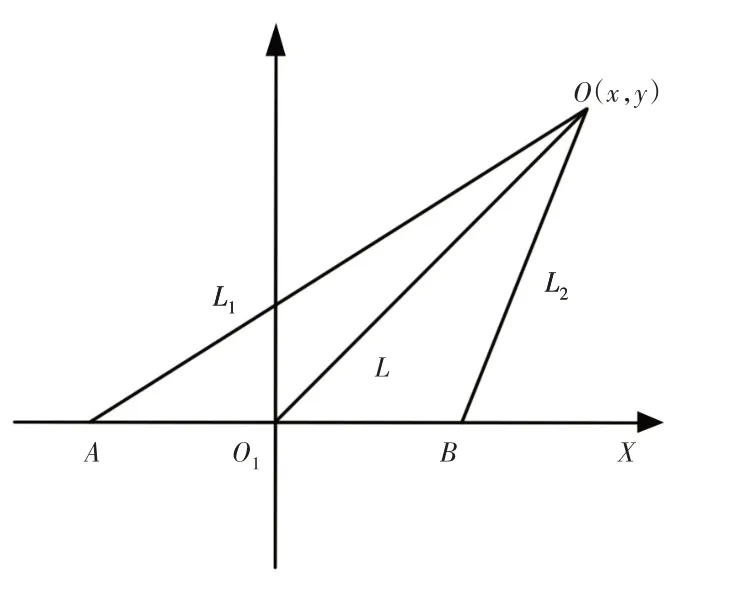
图4 两个超声波模块确定障碍物的位置Fig.4 Two Ultrasonic Modules Determine the Location of Obstacles
其中O点的坐标为(x,y),AO长为L1,BO长为L2,AB长为2a,通过数学关系可解得:
3.2.4 避障算法
模糊推理控制方法将人类思维融入系统控制之中,可以较好地满足系统自适应性、鲁棒性和实时性的要求,选择模糊避障方式[6]。
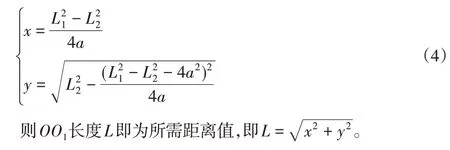
模糊控制系统结构,如图5所示。其中模糊控制器的建立是模糊控制算法的核心。
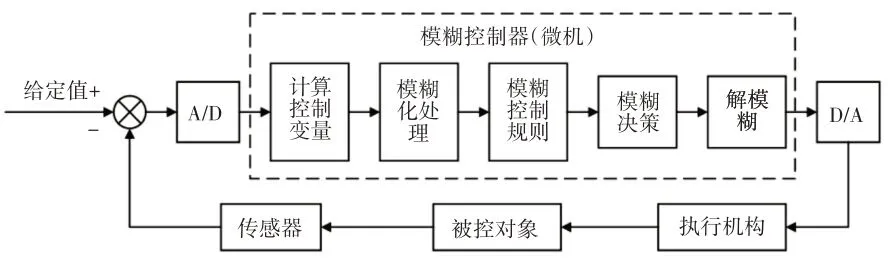
图5 模糊控制系统结构图Fig.5 Structure Diagram of Fuzzy Control System
其中输入量主要是下位机处理后的每个超声波采集到的距离信息,以及相应方位角度信息,输出量为机器人转动角度。将障碍物距离有效值设为0m到3m,定义障碍物的距离为近,中,远三个等级,则模糊子集为{NEA,MID,FAR},论域范围为(0,3)。每两个相邻的超声波模块的质心垂直延长线相交成30°角,角度有效值为(-60~60)°,负数代表左,正数代表右,可将方向信息用模糊语言描述为{“左”,“偏左”,“中”,“偏右”,“右”}={LI,LL,ON,RR,RI},论域为(-60,60)。输出量用模糊语言描述为{“左大”,“左小”,“零”,“右小”,“右大”}={TLB,TLS,TZ,TRS,TRB},论域为(-90,90)。综合考虑论域的覆盖程度、灵敏度、稳定性,以上模糊子集均选用三角形隶属函数。模糊控制规则的建立是设计模糊控制的技术关键,其核心是把专家经验或实验数据加以总结,得出相应的控制规则,得到的控制规则,如表1所示。
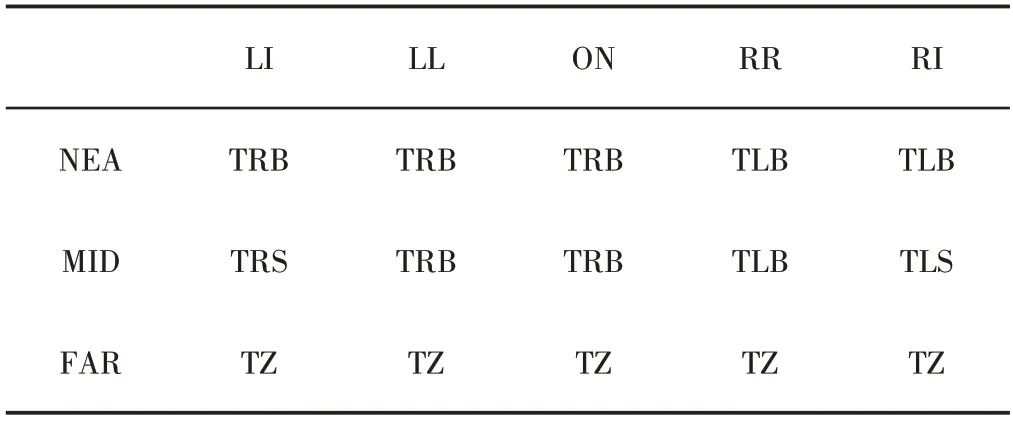
表1 模糊控制规则表Tab.1 Fuzzy Control-Rule Table
4 上位机控制软件设计
本控制系统使用LabVIEW作为上位机开发软件,进行模块化编程,编写与现实仪器十分相似的用户操作界面。利用该软件实现远程操作台的功能,具备命令的发送,采集数据的显示等,协助操作员进行控制与决策[7]。一个完整的LabVIEW 工程由前面板和后面板组成。前面板为主界面,类似于现实仪表的用户操作界面,如图6所示。

图6 显示界面设计Fig.6 Design of the Display Interface
命令栏中可以输入多种控制指令,包括机器人工作模式的切换,切换到人工模式下,可以对各电机的发送控制指令,控制车体移动和转向、水炮转向和喷射,切换到自动模式下,可以不再输入指令,车体将自动决策,两种模式下都会显示实时的温度值、气体浓度值和历史变化曲线。后面板为程序图,LabVIEW 采用图形化编程语言—G语言,程序以框图形式编写,如图7所示。
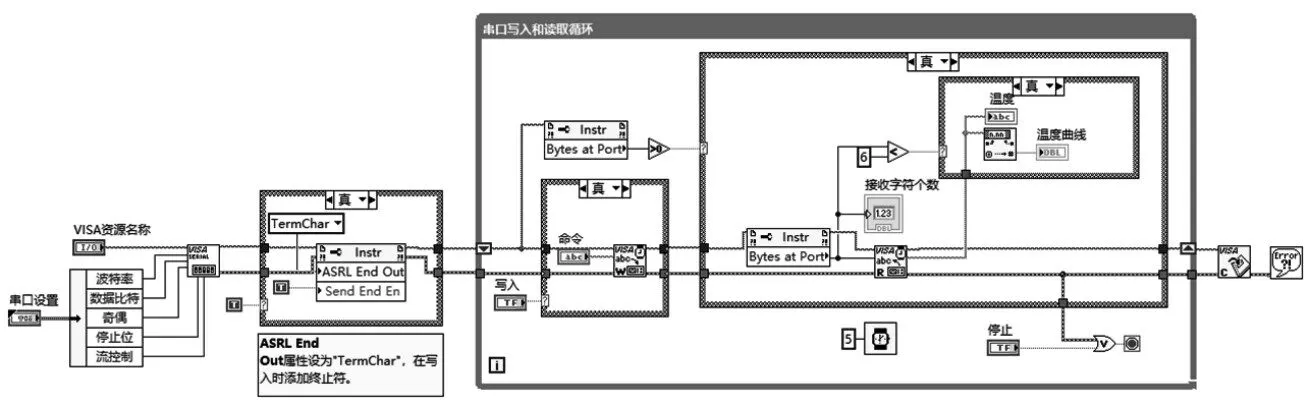
图7 程序图Fig.7 Program Map
程序首先是对数据传送格式的选择,然后经过数据的分析处理,得出输出值,再判断该值为指令或是采集的数据,最后发送至相应的端口。
5 实验与结论
为验证消防机器人的性能,我们在已制造的样机上做了一系列的实验,得出实验数据,如下为样机整体图,如图8所示。
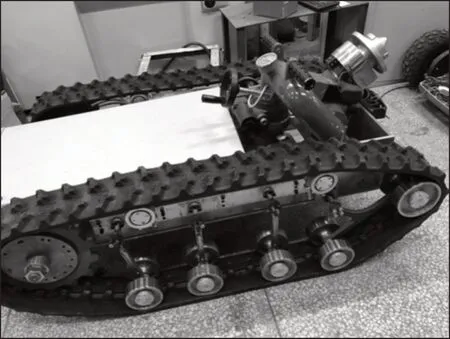
图8 样机整体图Fig.8 Diagram of the overall Prototype
(1)移动检测:机器人在平地上直线行走时,最大速度可达1m/s,可原地转向,当障碍物高度小于300mm时,可直接越过去,大于此高度,则选择避障,最大爬坡角为30°,还可以越过深200mm,长400mm的沟壑。
(2)数传与图传:室外图像无线传输距离可达150m,且此距离范围内信号波动很小,而数传距离可以更远;在模拟火场环境下,做了CO2、CO、H2S、CH4四种气体的检测,可以得到气体浓度和变化趋势,还测得温度值及变化趋势。
(3)水炮检测:可人工遥控水炮喷射以及喷射方向,无人干预下会根据高温情况自动喷射,也会自淋给车体降温。
设计了一款新式的多功能半自主遥操作消防机器人,在传统人工遥控机器人方式的基础上,增加了自动模式,可以人工遥控机器人前进、水炮喷射,也可以让其自主避障、自动喷洒灭火,同时具备环境检测并上位机显示功能。实验证明整个系统方案切实可行,方便可靠易于维护,为制造智能消防机器人提供了设计思路和设计方法。