多点称重法测量质心误差修正
2022-09-21王梅宝张晓琳张启元
王梅宝,张晓琳,陈 莉,余 箫,张启元
(1.浙江理工大学 机械与自动控制学院,浙江 杭州 310018;2.哈尔滨工业大学 仪器科学与工程学院,黑龙江 哈尔滨 150001)
1 引 言
质心位置对航天飞行器、舰艇、汽车、电机这类产品的运动分析、姿态控制及验证内部结构布局是否合理具有重要意义,因此需要对这类产品的质心进行精确的测量。常用的质心测量方法有多点称重法、不平衡力矩法、悬线扭摆法等[1~3]。不平衡力矩法[4]测量精度较高,但测量被测件的三维质心时,需要将被测件变换3个姿态,且需要单独测量被测件的质量,操作相对繁琐。悬线扭摆法[5,6]将被测件吊起使其在空中自由扭摆,通过测量扭摆周期计算质心,若被测件偏离扭摆轴,除了发生绕轴扭摆外还会产生复摆,一定程度上限制了测量精度,并且同样需要单独测量被测件的质量。多点称重法根据3个(或4个)称重传感器间的几何位置关系,以及这几个称重传感器测量得到的质量,由静力矩平衡原理计算得到质心。该方法结构简单,测量精度较高,可以同时测量被测件的质量,在质心测量领域应用广泛[7~11]。由多点称重法测量原理可知,测量之前需要精确的确定称重传感器的位置,建立测量坐标系。采用此方法测量质心时,影响测量结果的主要因素有[12~15]:称重传感器受力点的坐标;称重传感器的精度等级;所使用的3个(或4个)称重传感器组成的受力平面是否为水平面。其中称重传感器的精度等级由选用的称重传感器型号决定,称重传感器组成的平面是否为水平面需要精确的机械加工保证,且在测量前需要进行调平。而称重传感器上受力点的坐标通常取传感器承压头的几何中心。
现有的多点称重法中传感器承压头的坐标通常由机械加工和装配确定[14~16]。王超等[10,13]采用激光跟踪仪确定称重传感器的位置坐标,对于长约5000 mm的被测件其质心测量误差<0.5 mm。基于多点称重法研制的测量设备在使用过程中,特别是被测件质量较大时,由于上层平台的变形,称重传感器承压部分的结构、加工、装配等误差的影响,传感器实际受力点与理想受力点之间会存在偏移。通常飞行器对质心测量精度要求较高,有些型号的飞行器质心测量误差要求≤0.1 mm甚至要求更高。因此修正质心测量系统中传感器受力点的坐标尤为重要。
本文结合现有的多点称重法,提出一种用于修正称重传感器受力点坐标的方法,该方法采用高精度坐标测量仪精确测量标准件的质心,并将该测量值作为真值用于修正称重传感器的实际受力点,实验结果表明,经过该方法修正后的测量系统,质心测量误差≤0.1 mm。
2 测量原理
2.1 多点称重法的基本原理
如图1所示,被测件放置于测量平台上,测量平台下方有3个称重传感器。则测量平台与被测件的总质量由3个称重传感器共同测得,通过测量空载时工装的质量,以及测量加载被测件后的工装及被测件的总质量,可得出被测件的质量为:
(1)
式中:m为被测件的质量;Δmi分别为3个称重传感器在空载和负载2种状态时测得值的差值,i=1,2,3。

图1 质心测量系统示意Fig.1 Schematic of center of gravity measurement system
在测量质心之前需要预先定义测量坐标系,如图2所示,以3个称重传感器的几何中心为原点O,以3个称重传感器所在平面建立测量坐标系xOy,以原点O与某1个传感器受力点的连线为x轴,该平面的法向量为z轴,重力加速度相反方向为正方向;y轴由右手定则确定。3个称重传感器均布于以原点为圆心,以原点与某一传感器的距离为半径的同心圆上。质心测量的最初结果在测量坐标系下表示,并转换到产品坐标系下。
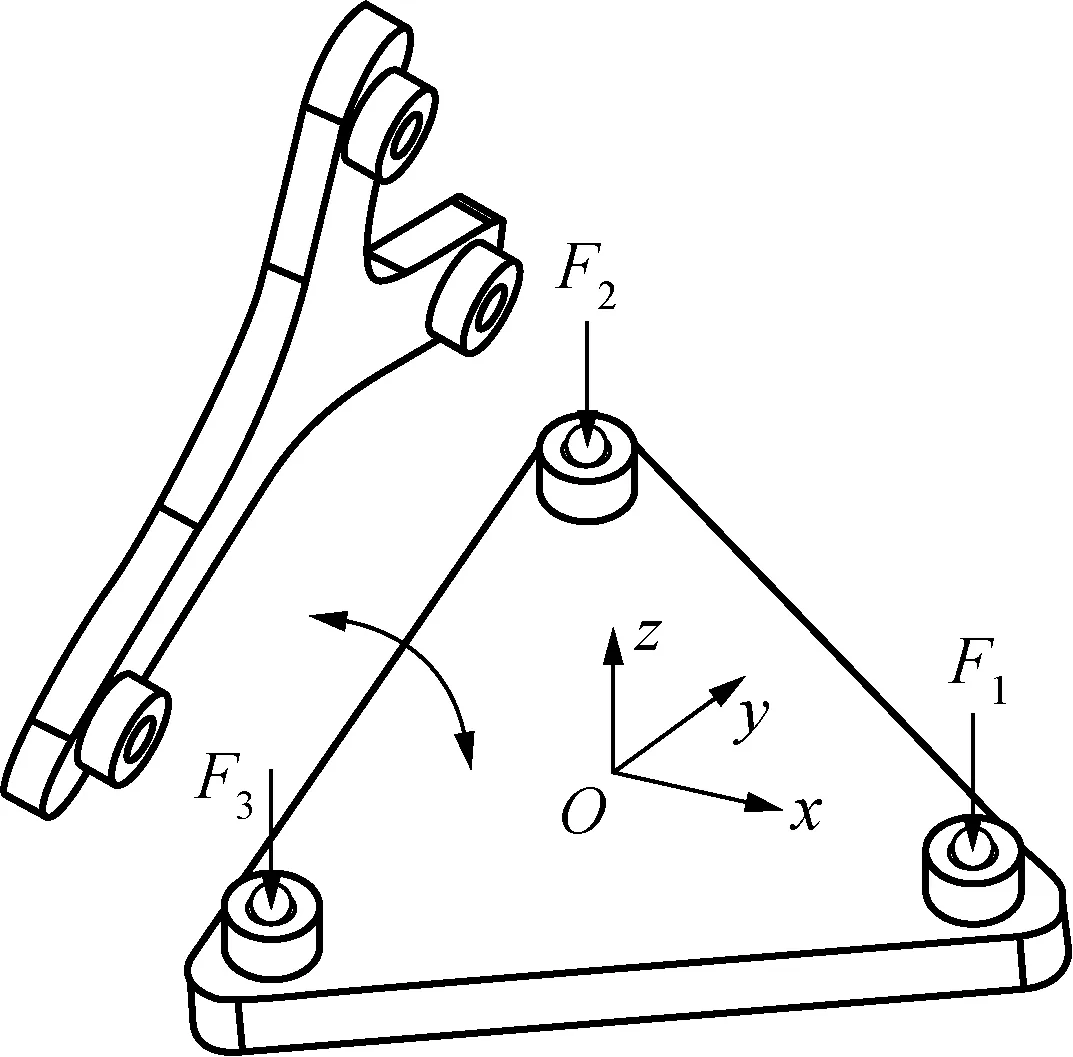
图2 测量坐标系示意图Fig.2 Schematic of measurement coordinate system
假设3个称重传感器的受力点在测量坐标系下的坐标分别为Si(xi,yi),空载与负载状态测得的差值分别为Δmi,根据静力矩平衡原理,则被测件的质心(x,y)在测量坐标系下为[12~16]:
(2)
由式(2)可知,称重传感器受力点坐标Si(xi,yi)的准确程度成为影响测量结果的关建因素。若式(2)中被测件质量m、测量坐标系下被测件的质心坐标(x,y)及Δmi已知,即可以求出称重传感器受力点的坐标Si(xi,yi)。
2.2 传感器坐标修正原理
2.2.1 坐标修正基本原理
如图3所示,采用圆柱形标准件作为被测件,其质量M已知,其形心坐标作为质心的相对真值。图3给出了测量设备及实验效果图。
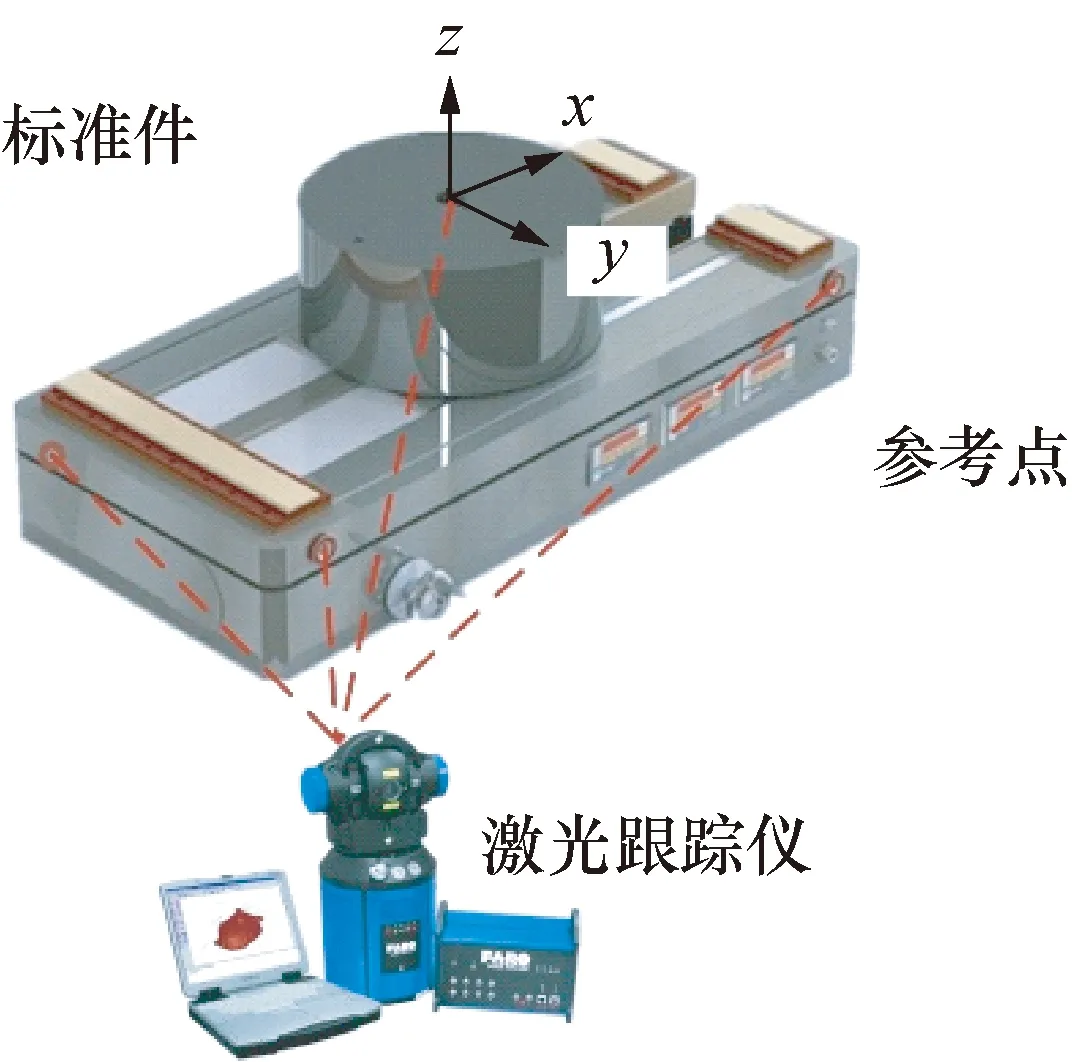
图3 测量设备及实验效果图Fig.3 Equipment and experimental rendering
采用激光跟踪仪精确测量被测件形心坐标,同时采集被测件上可视的3个以上的参考点坐标,参考点与称重传感器位置关系确定且预先测量完成,因此可以将形心坐标转换到测量坐标系下得到(Gx,Gy)。将被测件放置于测量平台上不同的位置,通过采集不同位置时称重传感器的测量数据,由静力矩平衡原理,可以分别得到:
(3)
(4)
式中:(Sxi,Syi)为测量坐标系下称重传感器受力点的坐标;p为称重传感器的数量;(Gxj,Gyj)为被测件在测量坐标系下的质心坐标,j=1,2,…,n,n为被测件不同位置;mnp为标准件位于第n个位置时,第p个称重传感器空载与负载状态时测得值的差值。式(3)可写为如下线性方程组的形式:
Gx=MSx
(5)
同理,式(4)可写为如下线性方程组的形式:
Gy=MSy
(6)
当n≥p时,可以通过分别求解式(5)、式(6)中的Sx和Sy,即为修正后的称重传感器受力点的坐标。求解式(5)、式(6)为典型的矩阵求解问题。
2.2.2 基于总体最小二乘法解算原理
最小二乘法在求解式(5)、式(6)时认为只有观测向量Gx,Gy存在误差,事实上由于矩阵M和Gx,Gy均为实测数据,均存在测量误差,因此最小二乘估计从统计学观点不再是最优的,其偏差的协方差将受到噪声干扰误差的影响而增加。本文应用总体最小二乘法进行解算[17,18]。
将式(5)改写为
(7)
式中:Sx为p×1阶待估参数;M为n×p阶系数矩阵(n≥p),且rank(M)=p;Gx为n×1阶观测向量。

Z=UΣVT
(8)
式中:U=[u1,u2,…,un]∈Rn×n;V=[v1,v2,…,vp+1]∈R(p+1)×(p+1);Σ=diag(σ1,σ2,…,σp+1);并且σ1≥σ2≥…≥σp+1≥0。
当vp+1,p+1≠0时,系数矩阵和观测值的总体最小二乘估计为:
(9)

(10)
并且:
(11)
式中:e、v分别为矩阵M与Gx含有的误差矩阵与向量;up+1、vp+1分别为矩阵U与V的第p+1列。
参数向量的总体最小二乘估计值满足下列关系:
(12)
由式(12)可得,基于奇异值分解的参数向量总体最小二乘解为:
(13)

(14)
由式(14)可得:
(15)
因此,称重传感器x轴方向坐标Sx的总体最小二乘估计为:
(16)
同理,可得称重传感器y轴方向坐标Sy的最优估计值为:
(17)
3 实验验证
根据现有的质心测量设备验证第2节提出的理论,该设备用于测量某型号飞行器的质量和质心,设备参数及配套使用的激光跟踪仪参数如表1所示。
实验共采用2个标准件,用于修正测量系统和验证修正后的测量结果,标准件为圆柱形,材料为不锈钢,表面发黑处理。
质心经过首都航天机械公司采购的美国空间电子公司型号为POI- 1600 M的质量特性测量设备测量,其质心的x坐标与形心的x坐标之间差值<0.05 mm,同样,其质心的y坐标与形心的y坐标之间差值<0.05 mm,因此将形心坐标视为标准件质心坐标的相对真值。将2个标准件分别编号为1和2,其参数如表2所示。
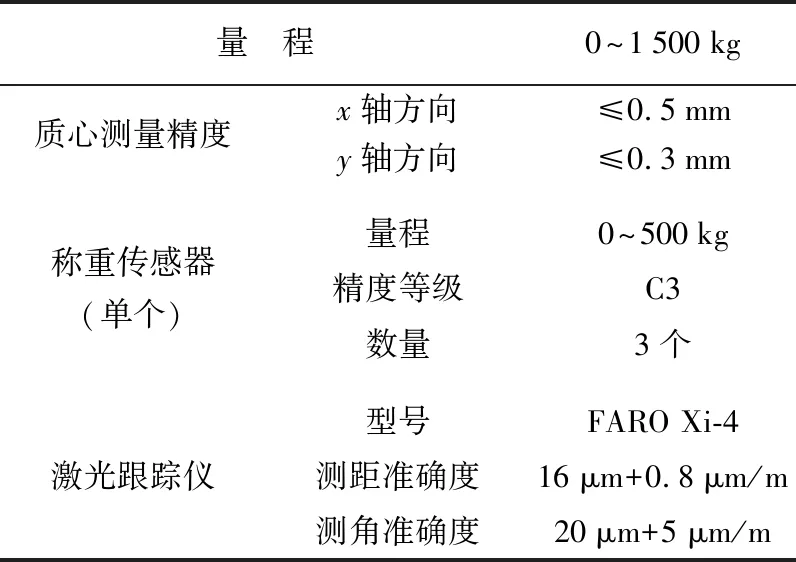
表1 质心测量设备参数Tab.1 Parameters of the center of gravity measurement system

表2 标准件的质量和质心Tab.2 Mass and center of gravity of the standard samples
实验共测量了10组数据。分别将1号、2号标准件放置于测量系统上5个不同的位置并测量其质心在测量系统中投影点的x轴、y轴方向的坐标,采用激光跟踪仪测量其形心坐标作为相对真值,并将该相对真值转换到仪器坐标系中。如表3所示,为测量系统测得的质心结果,与激光跟踪仪测得的形心坐标转换到仪器坐标系中的结果,2种结果偏差的最大值为0.24 mm。
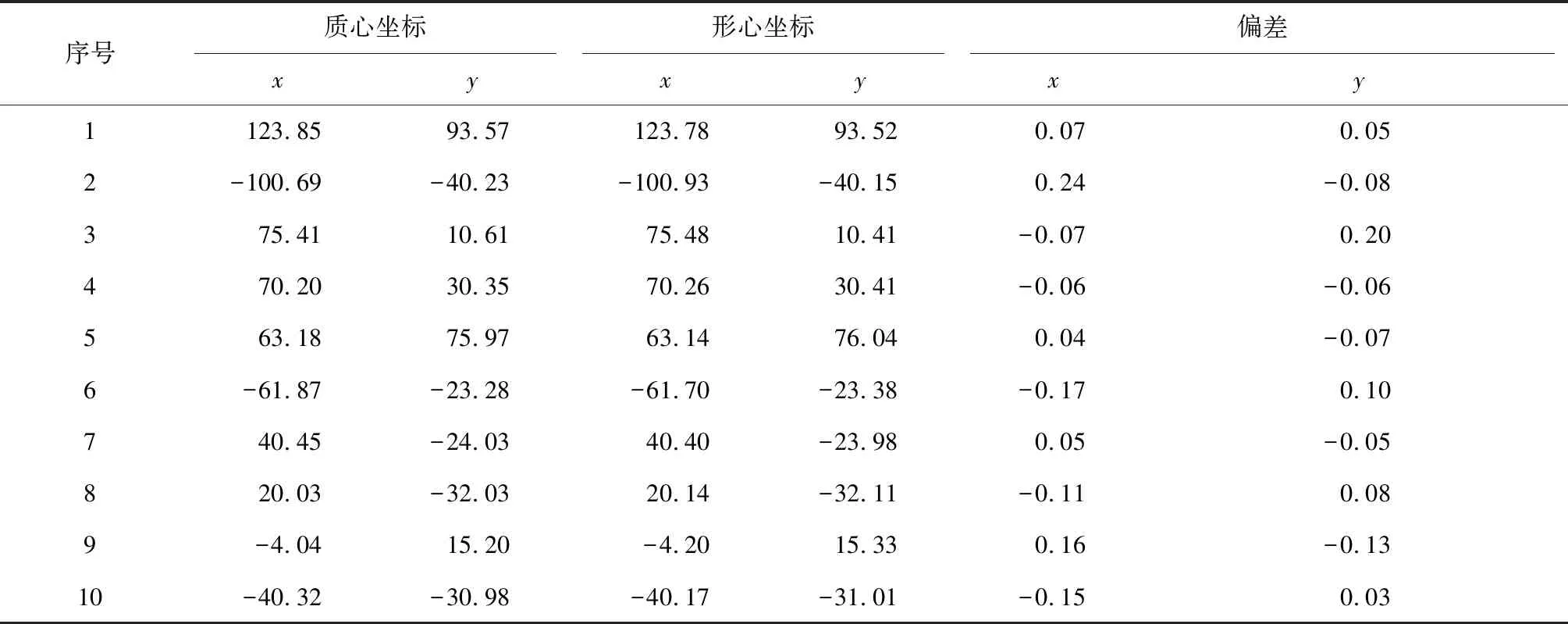
表3 标准件质心测量数据(测量坐标系)Tab.3 Results of center of gravity measurement for standard samples(measurement coordinate system) mm
采用第2节中所提出的修正方法,对3个称重传感器坐标进行修正。修正前后称重传感器坐标如表4所示。通过表4可知,称重传感器坐标修正值达-1.19 mm。
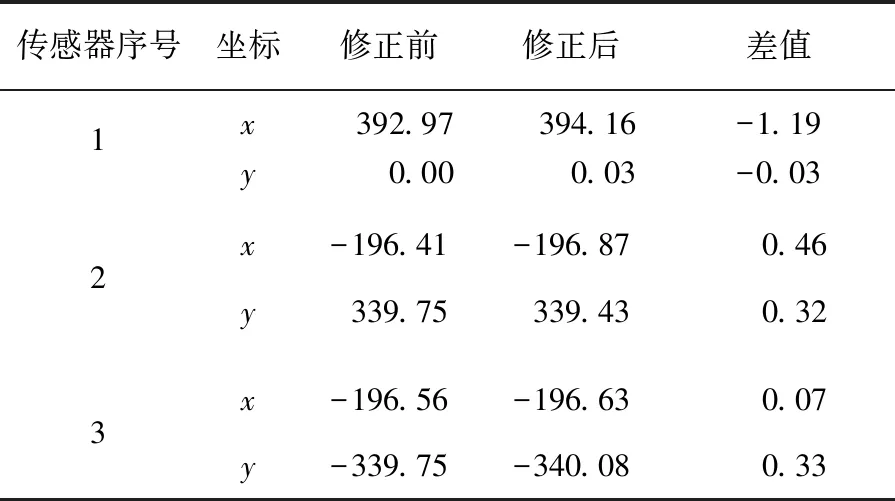
表4 修正前后称重传感器坐标Tab.4 Coordinates of the load cells before and after correction mm
采用表3中修正后的称重传感器受力点坐标作为新的坐标值,对1号、2号标准件再次进行测量,以验证修正后的质心测量结果,分别将标准件放置于测量设备上5个不同的位置,采用激光跟踪仪测量其形心并转换到测量坐标系下,作为相对真值,修正前后测量设备测得的质心与相对真值间的误差如图4所示。
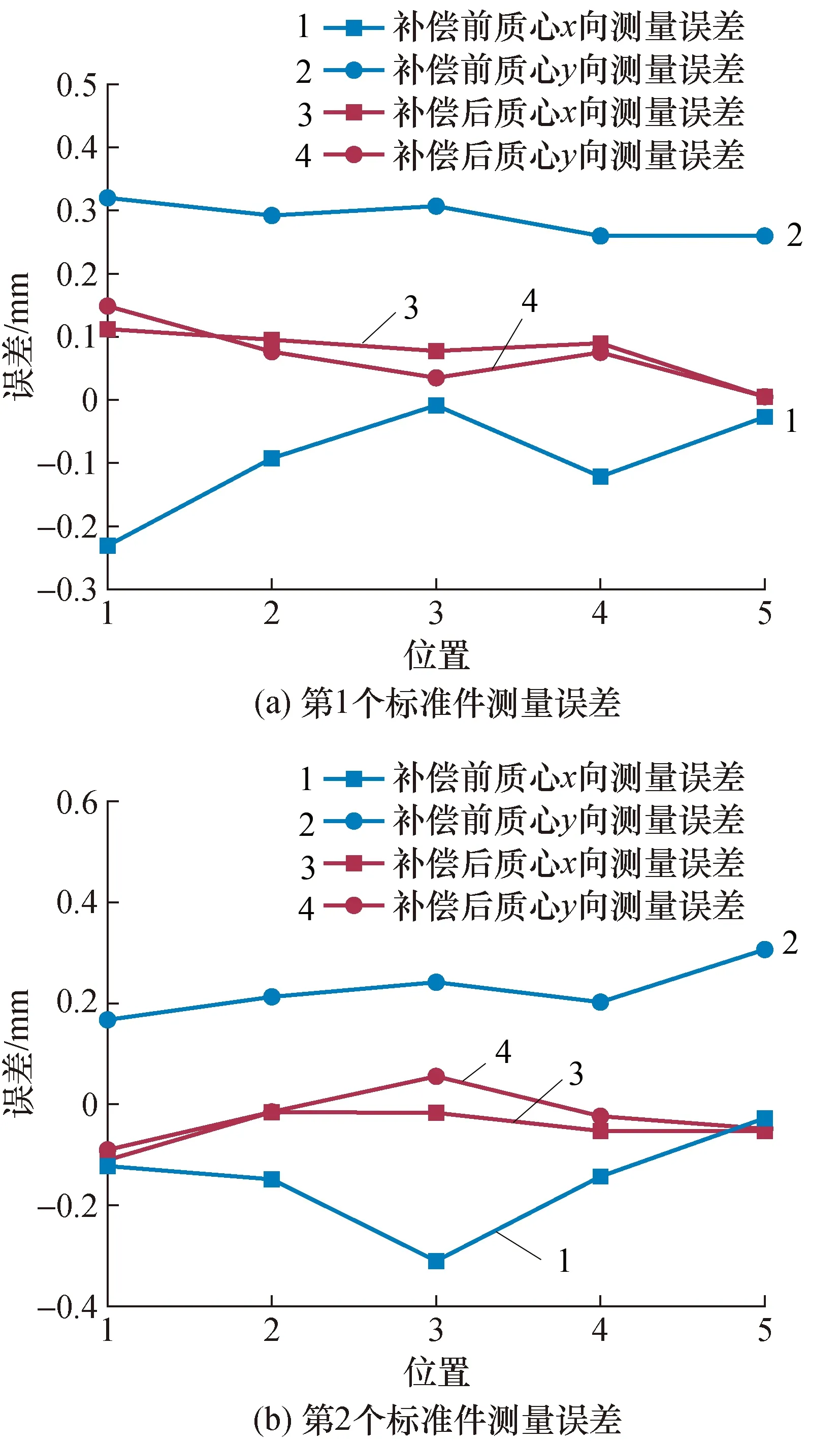
图4 修正前后质心测量误差Fig.4 Error of center of gravity measurement
修正前后标准件质心测量误差的标准差与平均值如表5所示。由图4及表5可知,修正前后质心测量误差的标准差没有明显变化,但修正后的质心测量误差的平均值明显减小,误差的平均值由 0.3 mm以内缩小至0.1 mm内。

表5 修正前后质心测量误差的标准差及平均值Tab.5 Standard deviation and average value of the error before and after correction mm
4 结 论
本文针对多点称重法测量质心时,传感器实际受力点的坐标与理想坐标不重合的问题,提出了受力点坐标的修正方法。首先介绍了多点称重法测量质心的原理及影响测量结果准确性的主要因素;然后分析了总体最小二乘法修正称重传感器受力点坐标的基本原理;最后采用现有的质心测量设备、激光跟踪仪及标准件进行实验验证。实验结果表明,经过修正后的测量设备,其质心测量误差的平均值由≤0.3 mm缩小至≤0.1 mm,可以满足飞行器的高精度质心测量需求。