基于人工智能的混凝土桥梁裂缝识别方法及应用
2022-09-20魏坚强曹仲龙
曹 峰,魏坚强,曹仲龙
(中交公路养护工程技术有限公司,北京 100037)
改革开放以来,中国桥梁工程紧跟时代步伐与国家经济发展需求,取得长足发展,桥梁建设规模不断扩大,预计到2025年中国公路桥梁总数将突破100万[1],其中以混凝土结构桥梁数量最为庞大。由于国家经济飞速发展和对超高交通运输能力、运输效率的需求,恶化了桥梁服役条件,导致这些桥梁实际使用年限大大降低[2],大多已经开始进入“老龄化”阶段,病害问题越来越突出,安全事故日益增多,严重影响桥梁的实际营运状态与正常使用[3-4],而裂缝属于混凝土结构桥梁相对严重的病害,表现为混凝土表面多分支、长延展的细小开裂,是混凝土结构物承载能力、耐久性及防水性降低的主要原因[5],据有关调查,混凝土桥梁结构坏损的事故中九成都是因为裂缝没有及时发现导致[6],因此定期对桥梁裂缝进行检测在桥梁运营阶段十分必要,有助于及时发现混凝土结构损伤有效降低安全事故的发生率。传统混凝土桥梁裂缝检测是利用桥检车或人工搭架将检测人员送至桥梁对应位置使用裂缝观测仪器进行近距离观测估值[7-8],如图1所示,但是混凝土桥梁形状多样,桥型及其周边地形环境复杂,检测危险性大,费时费力,且结果会受检测人员的主观性影响,所以仅靠传统方法很难对各种混凝土桥梁进行全面检测[9]。随着无人航拍技术在各行业的发展,敏锐的工程师也将无人机引入到桥梁检测领域,通过在无人机上安装高清摄像头、定位导航系统、测距仪等检测设备,利用无人机机动灵活的特点,可以解决传统检测方法的局限性对桥梁进行全面高效的监测[10-12],并已应用于实际桥梁检测项目中。然而,目前无人机检测多是操纵无人机抵近桥梁进行高清图像采集生成结构全景图,桥梁的裂缝缺陷仍然需要后期人工进行测量统计,冗多的检测影像数据极易造成视觉疲劳,检测结果的主观性误差仍旧没有得到有效解决[13],如图2所示。面对以上问题,基于计算机图像处理技术的发展成果,将机器视觉的自动检测系统应用于无人机图像处理,并应用于混凝土结构桥梁的实际裂缝检测以验证其效果。

图1 传统人工检测方法

图2 传统无人机桥梁检测
1 无人机硬件平台设置
根据无人机桥梁检测特点和要求,自主配置了无人机硬件平台,见表1。无人机选择经纬MATRICE 600-Pro高载无人机,如图3所示。内置于A3-Pro飞控系统的D-RTKGNSS模块可以提供北斗+GPS或者GPS+GLO-NASS等组合定位,确保无人机在强磁干扰环境飞行动态定位精度和信号安全。云台选择了DJI禅思Z15-GH4云台,其角度抖动量可以限制在±0.01°范围内,确保无人机在8 m/s以下风速条件下也能拍摄出满足要求的高质量图像。相机选择有效像素2 430万的索尼Alpha 7R III微单相机。电池选择容量为18 000 mA的格氏6S锂电池,续航最大时长可达15 min。

表1 无人机检测硬件平台

图3 经纬MATRICE 600-Pro无人机
2 无人机三维建模
2.1 航拍方案制定
航飞拍摄方案需要根据具体的桥梁检测任务和桥梁类型来确定。对于桥面系检测,在满足航拍图像航向重叠度和旁向重叠度在75%以上条件下,分别拍摄目标范围内的前、后、左、右及下视高清图像,并同步记录对应的定位数据,如果不满足要求,或重点检测部位的图像质量不足时,可针对该区域单独进行补拍;对于像索桥、拱桥等特殊桥梁构件局部检测,可针对性围绕检测部位环绕飞行,获取多视角图像及定位数据,照片须确保无死角,邻接图像重叠度在80%以上,拍摄方位夹角在30°内;对于下部结构病害进行局部重点检测时,由于信号较弱,检测安全风险较大,此时可以通过旋转云台拍摄桥下结构的多视角图像,但是这种拍摄手段得到的照片倾角较大,三维建模往往要针对桥梁两侧分别进行,图像要求与特殊构件检测类似。确定好航拍方案之后,便可依靠无人机的定位导航实现飞行路径智能规划。无人机飞行路径如图4所示。

图4 无人机航拍方案示意图
2.2 图像处理与三维立体重建
桥梁周边环境复杂,尤其是在桥下采集图像时,各角度图像亮度、色调及对比度差异性较大,为了得到高质量图像便于后续建模精确度,需要通过累积分布函数计算图像前后强度映射关系进行图像预处理来解决以上问题。
无人机采集的桥梁病害检测影像数据数量巨大,且重叠度较高,如果人工筛选,不仅效率低,还极易由于视觉疲劳出现遗漏。针对此问题,随着图像识别技术的发展与高精确的图像分割算法的不断改进,基于机器视觉的自动检测系统已经问世[14],裂缝图像识别技术已经进入到智能化时代。基于图像的裂缝检测过程如图5所示。
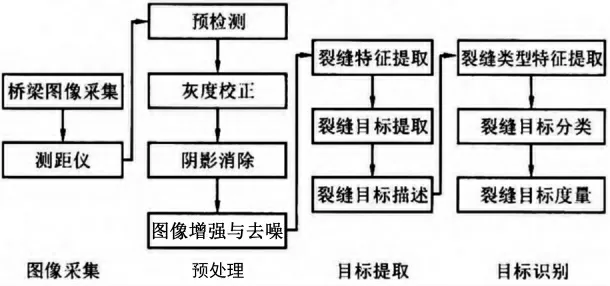
图5 基于图像的裂缝检测过程
得到处理过后的高质量图像之后,通过多视图像联合空中三角测量提取多视点立体影像中的同名像点生成具有真实坐标信息的密集点云,再构建Delaunay三角网就完成了三维立体重建,所有裂缝病害信息包含其内。
3 检测应用实例
选择某跨钢筋混凝土梁桥,将机器视觉的自动检测系统应用于无人机图像处理系统,开展基于无人机三维模型的桥梁检测试验验证工作。
检测对象为跨度20 m的大箱梁,无人机通过旋转云台与位置调整相结合的方式对梁体腹板进行多角度拍摄,获取了60张多视角高重叠度照片,梁体三维模型如图6所示。基于机器视觉的自动检测系统通过对裂缝图像进行特征提取得到检测结果,如图7所示,检测结果与实际情况对比如图8所示,在三维模型上得到裂缝长度为321 mm,宽度为0.12 mm,与人工现场实测结果(长334 mm,宽0.16 mm)基本一致,说明三维模型可以满足对梁体裂缝检测的需求。

图6 梁体三维模型
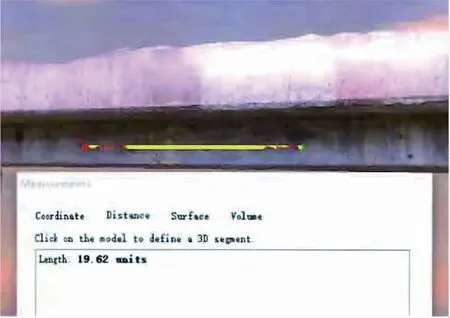
图7 三维模型上量测距离

图8 图像处理识别后的裂缝检测结果
4 结束语
基于计算机图像处理技术的发展成果,将机器视觉的自动检测系统应用于无人机图像处理,提出了一种基于无人机三维建模技术的桥梁裂缝智能检测方法。首先,针对无人机桥梁检测工作的特点自主配置了无人机硬件平台,然后,根据不同桥梁类型及检测任务简述了航飞拍摄方案,最后,阐述了无人机图像处理和裂缝检测的流程。使用该检测方法对试验桥梁开展检测验证,效果良好。
