免像控无人机大比例尺测图技术要求及应用研究
2022-09-20朱立波黄文骞季宏超李泽宇
朱立波,黄文骞,季宏超,李泽宇,薛 斌
(1.海军大连舰艇学院,辽宁 大连 116000;2.91937部队,浙江 宁波 315000)
如今无人机航空遥感技术迅猛发展,在利用无人机进行航测成图及三维建模方面,已经在工程勘测、城市建设和水利测量等各个领域发挥着越来越重要的作用[1]。常规航测作业受制于像控点,这对于外业测量和内业处理都是一件费时费力的事。无人机免像控测量技术的出现有效克服了这一不足,特别针对部分高山、密林、滩涂和沿岸等人员无法进行像控测量的困难地区,则更能突出免像控航测系统的优越性,也使得它在大比例尺测图中越发受到重视[2]。作为一种前景巨大的新技术,需要对其技术要求展开研究并分析其成图精度。
文中首先阐述了无人机测制大比例尺地形图的常规作业过程,然后又着重介绍了免像控无人机测制大比例尺地形图的技术要求,并以大连市区实测的1∶500大比例尺地形图为例,使用飞马D2000无人机,由此进行航空摄影测量成图并进行了精度分析,最后对常规RTK、网络RTK技术、动态后处理(Post Processed Kinematic,PPK)技术及免控测图的优势展开了讨论,为大比例尺测图实际工作提供参考。
1 无人机测制大比例尺地形图的常规作业流程
1.1 比例尺
航摄像片上的一条线段与地面上对应线段水平距离的比值称为航摄比例尺,成图比例尺则表示了地图上一条线段的长度与地面上对应线段的实际长度之比。人们常说的大比例尺测图,一般指的是1∶500~1∶5 000之间比例尺地形图的测制,两者之间的关系见表1[3]。

表1 摄影比例尺与成图比例尺的关系
在开展航空摄影作业前,需要先确定相机和摄影比例尺,再按照计算的航高来设计飞行,以得到满足实际需求的航摄产品。
1.2 常规作业流程
无人机测制大比例尺地形图的常规作业流程主要包括收集资料、技术设计、航飞方案设计、像控布设与测量,以及航摄实施与内业处理等环节,如图1所示[4]。

图1 无人机进行大比例尺测图的常规作业流程
在常规无人机开展航测作业时,其定位精度较低,一般只可以达到米级,必须通过在地面上布设像控点来加以修正,以得到更精确的位置信息。所以,相当数量的像控点是航摄像片信息处理中的数学基础,它是航摄数据资料和大地成果连接在一起的纽带,从而使得航摄测量具备和地面测量一致的数学关系[3]。通过空三解算,解决影像的定向及地面点的加密问题,最终获取加密点的位置坐标。
由此可以看出,无人机测制大比例尺地形图的常规作业对于像控点有着较大的依赖,无论是外业像控测量还是内业刺点,都将耗费一定的时间和精力,同时,控制点布设方案的选择、布设点的稳定程度及内业刺点的精度也都会对测量结果的精度造成直接的影响。相较于常规作业,免像控作业受天气影响以及地形条件限制较弱,降低了对外业像控点布设的依赖,缩短航测生产工期,减少外业工作量,大幅提高工作效率。
2 免像控无人机测制大比例尺地形图的技术要求
2.1 厘米级导航定位系统
免像控无人机需要安装RTK模块,即运用RTK技术。其工作原理是:安装在基准站及移动站上的接收机不断同步接收卫星信号,基准站利用观测数据与已知的位置信息进行分析解算得到GPS差分改正值,移动站通过这个改正值以修正自身数据,从而获得经差分修正之后厘米级的定位结果,达到提高移动站定位精度的目的[5-6]。
按照基准站和移动站通讯方式的不同,RTK技术可以分为常规RTK和网络RTK。在常规RTK中,流动站获取的修正值数据信息来源于基准站的电台;而在网络RTK中,流动站的修正数据信息来源于专用的GPRS(General packet radio service)网络,这个专用网由基准站网、数据中心和数据通信线路构成,常规RTK与网络RTK两者具体原理分别如图2(a)、图2(b)所示。
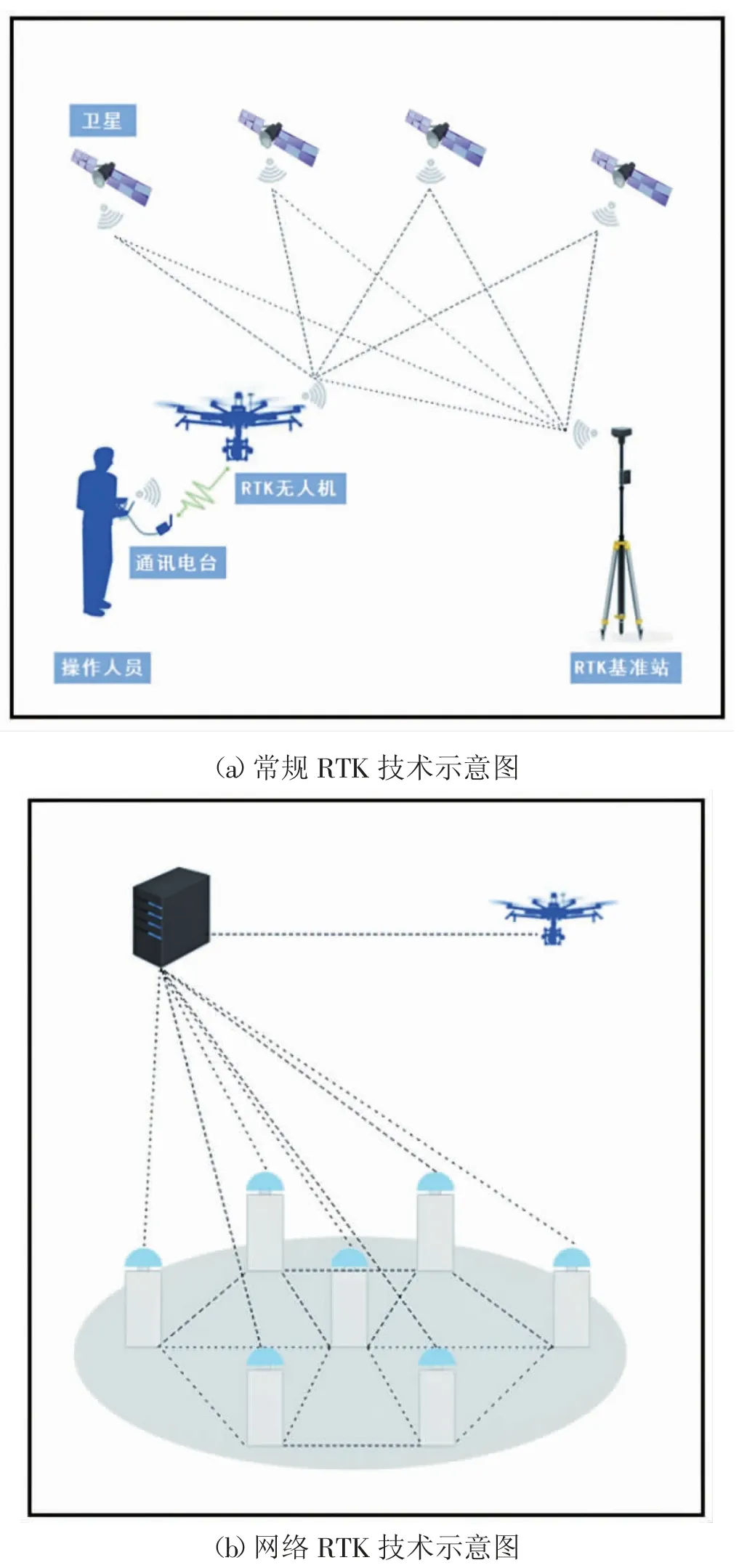
图2 常规RTK和网络RTK技术示意图
在RTK技术的基础上,可以再结合PPK技术,PPK数据事后处理的方式可以解决一部分因曝光延时和卫星信号丢失出现偏差的问题,通过融合解算有效提高定位精度。
PPK技术的工作原理是:基准站和移动站上的接收机同步接收卫星信号,事后通过计算机的处理软件将观测数据进行线性组合,生成虚拟的载波相位观测量,由此确定接收机之间的相对位置关系,再结合基准站的已知位置信息,便可通过解算获取移动站的坐标信息,具体原理如图3所示[7]。
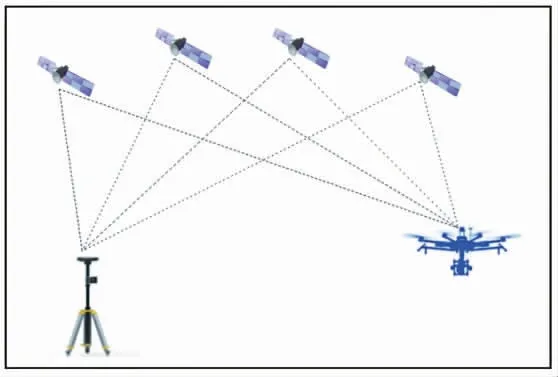
图3 无人机PPK技术示意图
综上所述,搭载RTK模块后的无人机,利用常规RTK或者网络RTK的方式,就可以获取厘米级的定位精度,基本可以满足免像控大比例尺地形图航测作业的要求。如果可以结合PPK技术,则可以进一步提高测图精度,从而保障无人机无需像控点便可实现测制各种地区大比例尺地形图的要求。
2.2 高精度姿态数据及三轴云台
无人机高精度的姿态信息主要通过在定位定姿系统(Position and Orientation System,POS)中的INS(Inertial Navigation System),即惯性导航系统。惯性导航系统的3个加速度计可以敏感地捕捉目标物体在3个方向的加速度信号。另外,3个单轴的陀螺仪则可以检测出目标物体的角速度信息。再通过数学积分运算就可计算得到目标物体的速度和位置信息[8]。
无人机的实时速度可以通过三轴的加速度大小和时间得到

已知无人机的初始位置,无人机的实时位置就可以通过对三轴的速度分量进行积分可以得到

式(1)—式(2)中:v为速度;a为加速度;r为目标载体的位置;t0为初始时刻;tk为某一瞬时时刻。
惯性导航系统除了惯性测量单元(Inertial Measurement Unit,IMU)外,计算装置、控制显示器等部件也是必不可少的,具体工作原理如图4所示[8]。
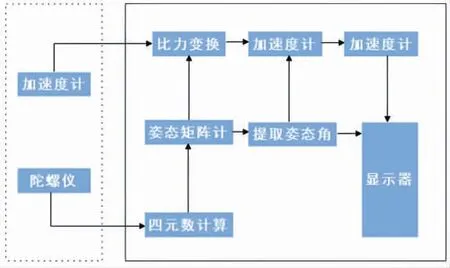
图4 IMU原理图
除了高精度的姿态数据之外,还需要精密的云台,以保证无人机可以平稳地搭载各种载荷。无人机一般要求具有高精度的三轴云台,从而可隔离对无人机姿态的干扰、框架之间的相互耦合,从而减少机械振动、点击的反电动势的误差影响,从而保证了无人机机载相机视轴的稳定性,并确保拍摄出高精度、无失真的中低空遥感影像。
2.3 精准数据采集系统
无人机免像控应用离不开精准的数据采集系统,系统的时间同步功能将飞控、载荷和RTK时间同步在一起,以保证相机成像时刻的超低时间误差。另外,对相机镜头点和天线系统的中心点位置进行修正,减少位置信息和相机的时间误差,从而获取更加精确的影像位置信息[9]。
2.4 准确的相机内方位元素
无人机搭载的相机载荷一般都是非量测相机,这种相机镜头畸变较大,内方位元素未知。为了提高其数据产品的精度,需要在航空摄影测量之前对无人机相机参数进行标定[9]。
直接线性变换法是建立像点坐标和相应物点物方空间坐标之间直接的线性关系的算法,其严格的共线方程为
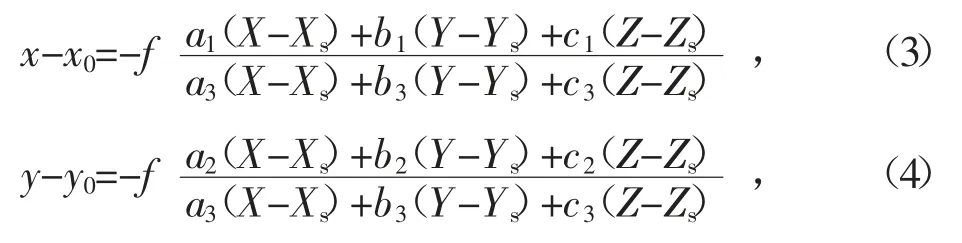
式(3)—式(4)中:(x0,y0)表示像主点坐标;(x,y)表示像点坐标;(X,Y,Z)表示的是物方空间坐标系下像点所对应的地面点坐标;(Xs,Ys,Zs)表示的是摄站点在物方空间的三维坐标;f表示相机的主距;ai,bi,ci(i=1,2,3)是其所关联坐标轴的系数。若采用直接线性变化对其进行计算,所得到的直接线性变换公式为
式(5)中:Li(i=1,2,3,…,11)是直接线性变换方法的待定参数,表示了物空间坐标系和图像空间坐标系之间的关系。考虑到无人机搭载的非量测相机物镜畸变较大,需要附加畸变改正,由此列出以下公式:
考虑镜头的仿射变形和径向、偏心畸变,畸变改正参数△x、△y可以表示为

式中:m1、m2为仿射和剪切畸交换系数;r为像点径向半径;ki(i=1,2,3)为径向畸变系数;p1、p2为径向畸变系数。由此可以解算出Li(i=1,2,3,…,11)和k1、k2、k3、p1、p2、m1、m2,然后再进一步计算,可以得到相机的内方位元素x0、y0。
3 低空摄影实验及精度分析
本文的试验研究区域位于辽宁省大连市,测区面积约1.5 km2,试验采用飞马D2000多旋翼无人机系统,该系统装载了RTK模块,支持网络RTK/PPK融合差分作业模式,配套飞马无人机管家可以进行高精度RTK/PPK融合解算,全面提升了定位精度及数据质量的可靠性。机上配备了D-OP3000倾斜五镜头相机,通过相机与平台之间的硬件协同与控制算法,保证了DOP3000每摄站具有突出的时间同步与姿态控制能力。另外,飞马配套建设的相机实验室检校场提供了相机高精度的相机内方位元素,能够满足载荷的畸变改正达到亚像元级别。以上技术要求为飞马无人机的免像控应用打下了基础。
在任务过程中,航高设置为120 m、航向重叠率设置为80%、旁向重叠率设置为70%,综合考虑测量区域的面积、形状和地形地貌形态等特点,均匀布设了25个检查点,用于对成果质量的控制,具体检查点分布情况如图5所示。

图5 检查点分布情况图
试验研究中数据处理所使用的是LENOVO 30DJS8HX00计算机,其采用了Windows1 064位操作系统,搭载了i9-10900处理器,运行内存为128 GB,机身内存为10 T,可以为海量航摄影像提供充沛的存储空间并较为高效地完成数据处理工作。试验中将基站GPS数据与飞机GPS数据通过飞马无人机管家进行后处理差分解算,无像控点参与计算,运用飞马无人机管家生产的测区一部分DSM、DOM及25个检查点精度检核情况分别如表2和图6所示。

图6 试验区部分区域数字正射影像(DOM)和数字表面模型(DSM)
从表2中可以看出,平面坐标X、Y方向的偏差均在0.15的限差范围内,高程Z方向的限差也在基本等高距的1/3(0.15 m)限差范围内。根据GB/T 7930—2008《1∶500 1∶1 000 1∶2 000地形图航空摄影测量内业规范》,平面及高程精度均满足1∶500地形图测制要求,因此利用飞马D2000无人机采用免像控技术测制1∶500大比例尺地形图是完全可行的,可以高效地满足实际生产需求。

表2 试验区检查点精度检核
4 讨论
4.1 常规RTK与网络RTK的比较
常规RTK与网络RTK的对比可以从工作效率、作业精度和作业距离这几个方面展开。在工作效率上,常规RTK作业流程相对比较麻烦,主要包括收集已知控制点、现场踏勘、已知点上架设基准站和配置基准站等多个环节,而网络RTK只需要设置好连接基准网络的参数就可以开展移动站的作业;在作业精度上,常规RTK的误差处理方式是先采用钟差模型修正,再利用同步观测值差分来减小误差。当基准站和移动站之间的距离控制在一定范围内,GPS误差的空间相关性大致是随距离线性变化的,如果超出一定范围,则会导致数据出现较大的观测误差。网络RTK主要是通过同步观测值求差的方式来减小误差。相对距离较近的虚拟基准站为移动站提供了所需的数据,这种方式可以有效减小轨道误差。另外,服务器也可以充分调动整个网络的资源,用于更加精确地解算模糊度,明显加快了初始化速度;在作业距离上,常规RTK作业常常受到数据链电台传输距离和定位精度的制约,使得作业距离往往十分有限,一般最远作业距离在15 km左右。而网络RTK克服了定位精度与距离相关的缺点,只要有网络覆盖,就可以直接使用网络高精度的差分信息,作业范围得到扩大[10]。
4.2 RTK技术和PPK技术的比较
RTK技术和PPK技术两者操作模式相同,都需要使用基准站及移动站的模式,而且都可以获取厘米级的定位精度。但二者的通信手段有所不同,使用RTK时,必须使用无线电台或网络来传送差分数据,而在利用PPK技术开展测量作业时,则无须携带通信装置。二者在定位方式上也存在差异,使用RTK时,能够实时掌握测点的位置信息和精度信息,而使用PPK必须先进行测量后处理才能够看到测量结果。另外,在作业范围上,常规RTK受制于基准站和作业精度,网络RTK受制于网络信号的覆盖范围,理论上一般RTK最远的工作距离在15 km内,但PPK一般操作半径可以达到50 km,同时定位精度也比RTK要高些。因此,PPK技术相较于RTK技术还是有一定优势的,拥有着广阔的应用前景[11]。
4.3 免控制点测图的优势分析
免控制点测图免去了布设外业控制点这一步骤,这使得外业工作量大大减少,可以缩短航测生产工期,提高了工作效率。在内业数据处理时,需要人工刺控制点,这些对于人员的专业素质要求相对较高,难免会引入人为误差,空三解算时造成误差累积,导致成果质量的降低,免控制点则能有效避免刺点误差。除此之外,对于一些通视较差,或者不易于布设控制点的危险区域,免控制点测图的方式发挥的作用更加明显,它使得航测作业更加高效、安全和可靠。
5 结束语
随着对无人机技术研究的不断深入,在精度满足需求的情况下进行产业化应用推广,将逐步摆脱航空遥感对地定位长期受制于地面控制的情况,大幅度提高工作生产效率,同时解决高山、荒漠、沼泽、茂密森林、海岛礁等复杂和危险地区快速获取地理信息的难题,使得无人机免像控技术得以充分发挥高效、快速、灵活及机动的特点,广泛应用于国民经济建设的各个领域。
