深中通道沉管隧道平面贯通测量方案研究设计
2022-09-20成益品张浩强张超董理科韩战伟
成益品,张浩强,张超,董理科,韩战伟
(1.中交一航局第二工程有限公司,山东 青岛 266071;2.中国交通建设股份有限公司,北京 100088)
0 引言
深中通道岛隧工程隧道全长6845 m,其中,沉管隧道全长5035 m,由32个大型预制钢壳管节对接安装而成。沉管管节沉放对接平面贯通偏差允许值为±50 mm[1],远高于国家现行测量规范贯通偏差要求。沉管隧道最终接头的贯通面位于E23和E24管节之间,隧道西端与西人工岛暗埋段相连,隧道东端与东人工岛堰筑段水下连通。结合深中通道岛隧工程总体规划与施工部署,隧道贯通面两端平面贯通测量方案设计不仅要考虑隧道长度、网形布设和管内施工进展影响,还要兼顾隧道贯通面东端受隧道洞口水下互通堰筑段封闭施工条件限制,不能采用常规的导线测量方法向洞内引测基准点的影响。
成益品等[2]通过港珠澳大桥沉管隧道贯通测量的工程实践,探析了保证沉管隧道精密贯通的洞内导线网形设计、精度评估及提高贯通精度的测量技术。李冠青等[3]主要针对港珠澳大桥沉管隧道导线测量受端封门影响的情况,通过理论分析、模拟试验和现场实测,进行了导线测量从行车道转中管廊并延伸到隧道末端的方法及精度研究。李冠青等[4]针对港珠澳大桥沉管隧道的安全贯通问题,从隧道外GNSS网的布设及施测方法出发,通过对GNSS网点的稳定性分析,估算GNSS网引起的贯通误差影响值。
目前沉管隧道平面贯通测量主要采用洞外GNSS观测、洞内导线测量方案。本文结合施工现场条件设计洞外“光学投点+GNSS静态观测”和洞内导线测量组合的隧道贯通方案,通过理论精度评估和现场检核验证,方案整体精度及稳定性较好,满足沉管隧道高精度贯通要求。
1 方案总体设计思路
按照沉管安装验评要求,每节沉管安装后进行一次初始姿态贯通测量,考虑到沉管管节稳定性影响,每节沉管安装前进行一次贯通控制网测量。
平面贯通测量控制网设计分洞外、洞内及洞口联系测量三部分。其中,洞外点与岛隧施工控制网GNSS静态联测;洞内点采用导线测量,洞内网形结合管节安装进度和管内测量作业条件动态调整设计,在两行车道布设双线形联合锁网;洞口联系测量隧道贯通面西端采用导线测量方法,隧道贯通面东端采用“光学投点+GNSS静态观测”方法,在东岛堰注段顶部施工支撑横梁上搭设观测平台,用于向堰筑段内投射贯通测量基准点。观测平台安装强制对中装置,以降低投点仪器对中误差,基准点投射在预先浇筑好的混凝土观测墩平台上。
2 观测技术指标要求
根据沉管安装贯通精度要求,结合JTG C10—2007《公路勘测规范》[5]和TB 10601—2009《高速铁路工程测量规范》[6]中有关规定,隧道贯通导线采用0.5″级全站仪配合机载程序测量,水平角采用全圆方向观测法观测12测回,半测回归零差不大于4″,一测回内2C互差不大于8″,同一方向值各测回互差不大于4″。导线测量测角中误差不大于1″,方位角闭合差不大于(n为测站数),导线全长相对闭合差不大于1/100000。每测站测距边气象改正通过全站仪自动改正。
3 网形设计及观测方法
3.1 隧道贯通面西端
隧道贯通面西人工岛端E1—E24沉管安装网形设计,管外测站点与定向点采用GNSS静态观测,测站点与相应定向点边长控制约700 m,管内外联系测量利用全站仪全圆观测法观测。管内布设双线形联合锁网,导线边长控制约800 m,分别在E1、E6、E11、E16、E21管节左右车道布设。沉管隧道贯通面西端双线形联合锁网见图1。

图1 沉管隧道贯通面西端双线形联合锁网图Fig.1 Double-linear joint lock net at the western end of the penetration surface of immersed tunnel
3.2 隧道贯通面东端
隧道贯通面东人工岛端E23—E32沉管安装网形设计,洞内测站点与定向点通过洞顶“GNSS静态观测+光学投点”方法建立,分别在堰筑段的左行车道两端头投射进洞测站点(LJD1、LJD2)、(RJD1、RJD2)和定向点(LJD3、LJD4)、(RJD3、RJD4),每个车道测站点与定向点边长约450 m。左右车道定向点位设计在预留施工通道正下方,便于重复投点检核。东人工岛堰筑段内投点位置分布见图2。
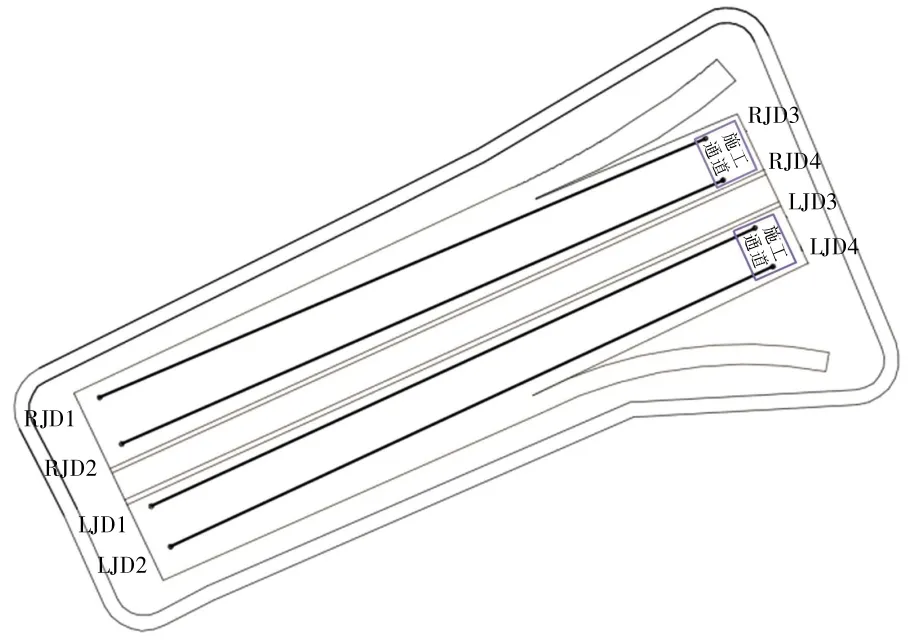
图2 东人工岛堰筑段投点位置分布图Fig.2 Location map of cast-in point of east artificial island weir construction section
东人工岛端隧道位于曲线段上,受通视条件影响,洞内双线形联合锁网导线边长控制约400 m,分别在E30、E27、E25管节布设。在2个车道进洞点(LJD1、LJD2)与(RJD1、RJD2)设站,后视定向边,利用全圆观测法进洞观测。沉管隧道贯通面东端双线形联合锁网见图3。
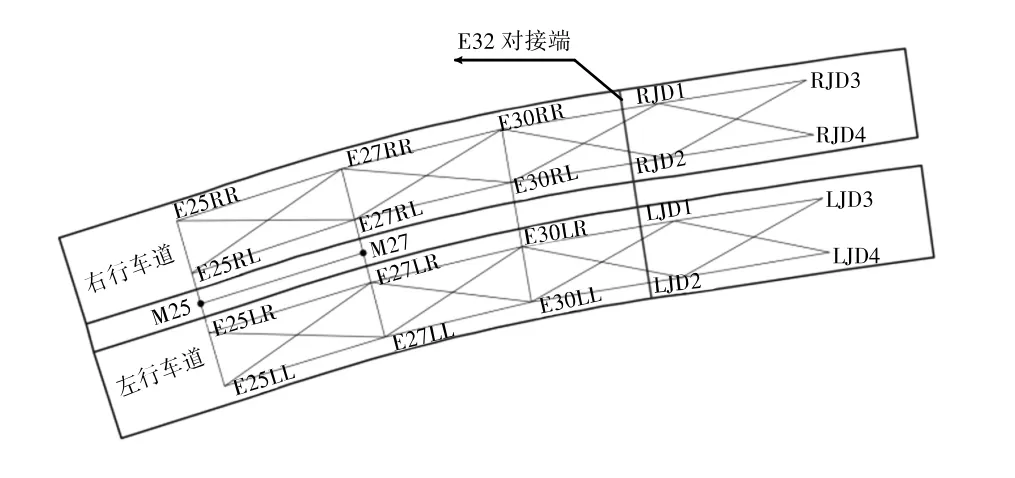
图3 沉管隧道贯通面东端双线形联合锁网Fig.3 Double-linear combination lock net at the eastern end of the penetration surface of immersed tunnel
4 贯通误差预计
4.1 误差分配
根据管节安装验收允许偏差,沉管隧道横向贯通限差按50 mm进行控制,限差为2倍中误差,则横向中误差为25 mm,以此作为沉管隧道贯通测量精度设计的依据。
设隧道外控制测量引起的横向贯通误差mS,西、东两端隧道内控制测量引起的横向贯通误差分别为mW、mE,则有mS2+mW2+mE2=m2。若按照等影响原则,即mS=mW=mE,则隧道外控制网和西、东端隧道内控制网引起的横向贯通误差均为14.43 mm。
考虑隧道外控制采用GNSS网,隧道内为狭长导线网,测量误差影响值可以分配大一些,由于贯通面位于从西端起E23和E24管节之间,东人工岛到贯通面距离约2 km,西人工岛到贯通面距离约4.5 km。根据西端和东端隧道内导线网的长度,把西人工岛端和东人工岛端的测量误差比例关系定为2∶1,确定出地面GNSS网和隧道内导线网测量引起的横向贯通误差分别为14.33 mm、16.66 mm(西人工岛)和11.78 mm(东人工岛)。
4.2 洞外控制网引起的隧道横向贯通误差估算
洞外定向边点与测站点按照公路二等GNSS测量[7]。要想满足上述贯通误差分配3个条件,贯通测量设计要素需根据控制网实测结果优化选取。根据深中通道岛隧工程施工控制网历期测量结果分析定向点的点位误差以及起始方位角误差,最弱点点位中误差不大于0.4 mm。所以对GNSS网引起的横向贯通误差进行估算时,取0.4 mm为进洞点的方向位差。
4.2.1 贯通面西端
西人工岛行车道洞外采用三点定向,在西人工岛洞口线路中线上布设洞口测站点,然后在进洞点区域再各布设定向点,洞口测站点与相应定向点边长约700 m。西人工岛洞外GNSS控制网引起的横向贯通误差主要由点位误差,起算边长误差以及洞外起算边方位角误差组成。
西人工岛进洞方向的方位角中误差估算:

式中:P为控制网中的待定点;A为已知点;σα为平差后方位角中误差;ρ为固定常数,ρ=206265;为垂直于PA方向上的位差;SPA为PA的距离。
西岛端洞外定向边引起的隧道横向贯通误差为:

式中:M西外为测站点点位误差和定向边方位角误差引起的横向贯通误差;Sy为测站点到贯通面的距离;Mα为定向边的方位角误差;Mx为测站点横向点位误差。
4.2.2 贯通面东端
东人工岛行车道洞外两点定向,在堰筑段西端左右车道线路中线上分别布设洞口测站点,在堰筑段东端区域再各布设2个定向点,测站点与相应定向点边长约450 m。
东人工岛端进洞导线定向边点与进洞点和岛隧工程施工控制网联测。进洞导线定向边点与进洞点通过岛隧施工控制网向堰筑段内投射得到,所以东人工岛洞外GNSS控制网引起的横向贯通误差除了要考虑点位误差,起算边长误差以及洞外起算边方位角误差影响外,还要考虑投点误差影响。
此方案中,先在堰筑段顶部埋设点位,记为TD,和岛隧工程施工控制网联测,确定点位坐标;然后通过预留吊孔把TD点的坐标投射到堰筑段内部,投影点记为JX,即洞外控制网进洞测站点。JX点的点位误差M为:

式中:MTD为点TD的点位误差;M投为投点误差,包括投点仪的仪器误差和对中、整平等误差。
仪器误差:仪器置平后,仪器误差主要指仪器竖轴误差。按激光投点仪的设计要求取极值0.5τ,则由此而引起的投点误差m1为:

式中,τ为水准管分划值;s为投点深度。
仪器安置误差:根据以往实测经验分析,仪器安置误差1~2 mm,取极大值m2=±2 mm。
确定激光光斑中心点的误差:对于精度为1/20000的激光投点仪,投点深度50 m左右时,可取确定光斑中心点的误差m3=±3 mm。
综上所述,激光投点误差m投,主要由仪器竖轴误差m1、仪器安置误差m2、确定激光光斑中心点的误差m3等误差综合影响,即:
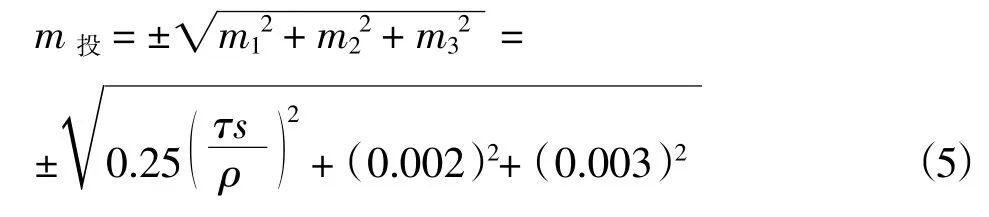
取s=50 m,τ=20″/2 mm,代入式(5)得:m投=3.80 mm
东人工岛堰筑段实际投点深度小于20 m,在投点条件良好的情况下,单点投点误差可控制在m投=2 mm之内,投射进洞点和定向点两点相对误差为2.83 mm,小于平面控制网最弱点点位中误差≤±5 mm的要求,取2 mm作为东人工岛进洞测站点的点位中误差。
同理,东人工岛端最弱点点位中误差取投点误差2 mm,进洞方向的方位角中误差估算为0.84″,东人工岛端洞外定向边引起的隧道横向贯通误差为8.25 mm。
洞外GNSS网引起的隧道横向贯通误差是8.67 mm,如式(6)计算,小于分配的误差。

4.3 洞内导线引起的隧道横向贯通误差估算
洞内平面测量采用二等导线网,测角中误差要求为1.0″。对双线形联合锁网进行估算,测角中误差取1.0″,测边误差取所用仪器LeicaTS60的标称测距精度(1+D×10-6)mm,其中D为测距,km。
利用科傻软件,按照设计的网形和测角、量边精度,进行模拟计算,得到西人工岛端导线网引起的横向贯通误差为16.02 mm,见表1,小于分配的误差。
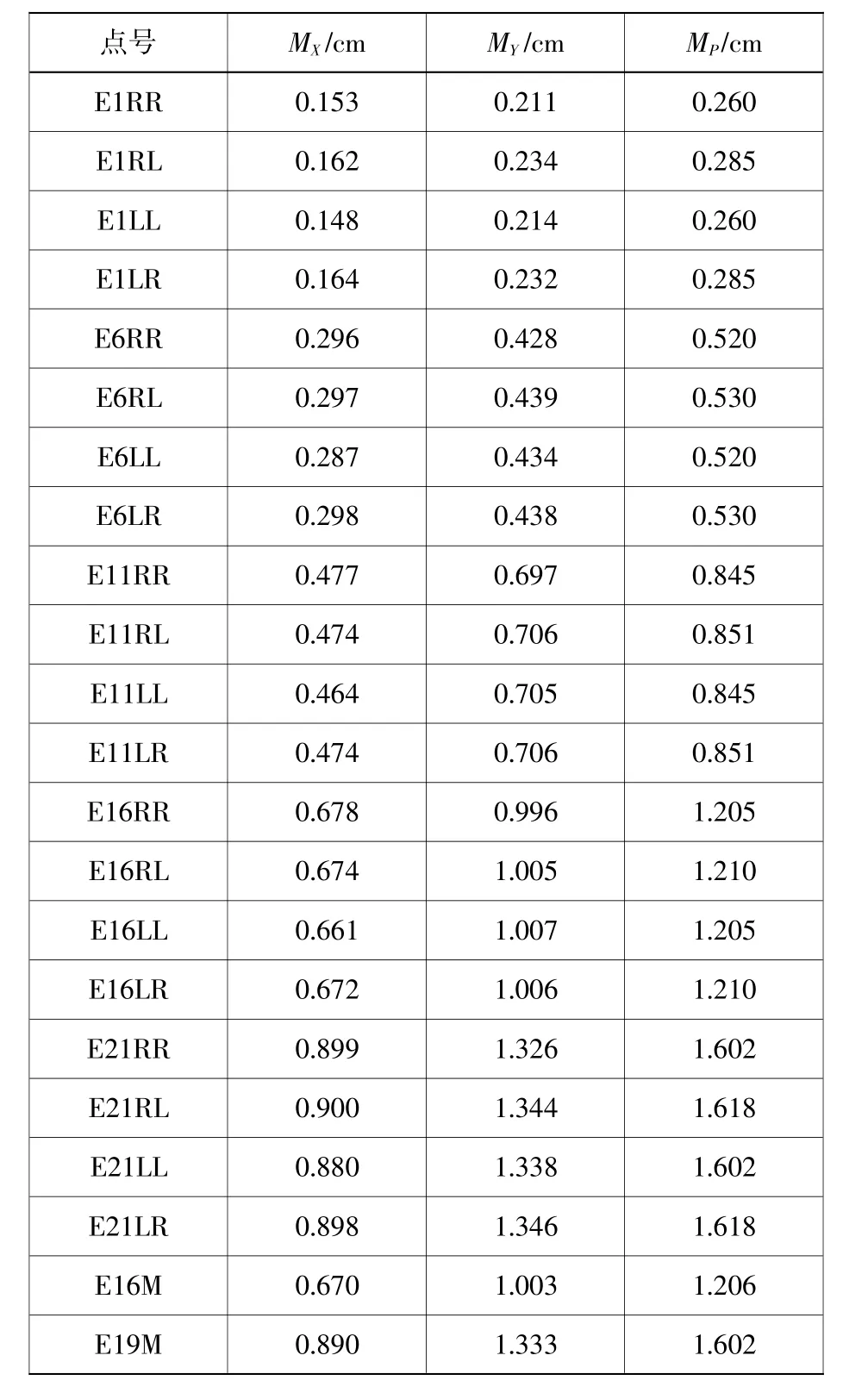
表1 西人工岛端各点模拟计算点位精度Table 1 Simulation and calculation of point position accuracy at each point of west artificial island
利用科傻软件,按照设计的网形和测角、量边精度,进行模拟计算,得到东人工岛端导线网引起的横向贯通误差为3.50 mm,见表2,小于分配的误差。
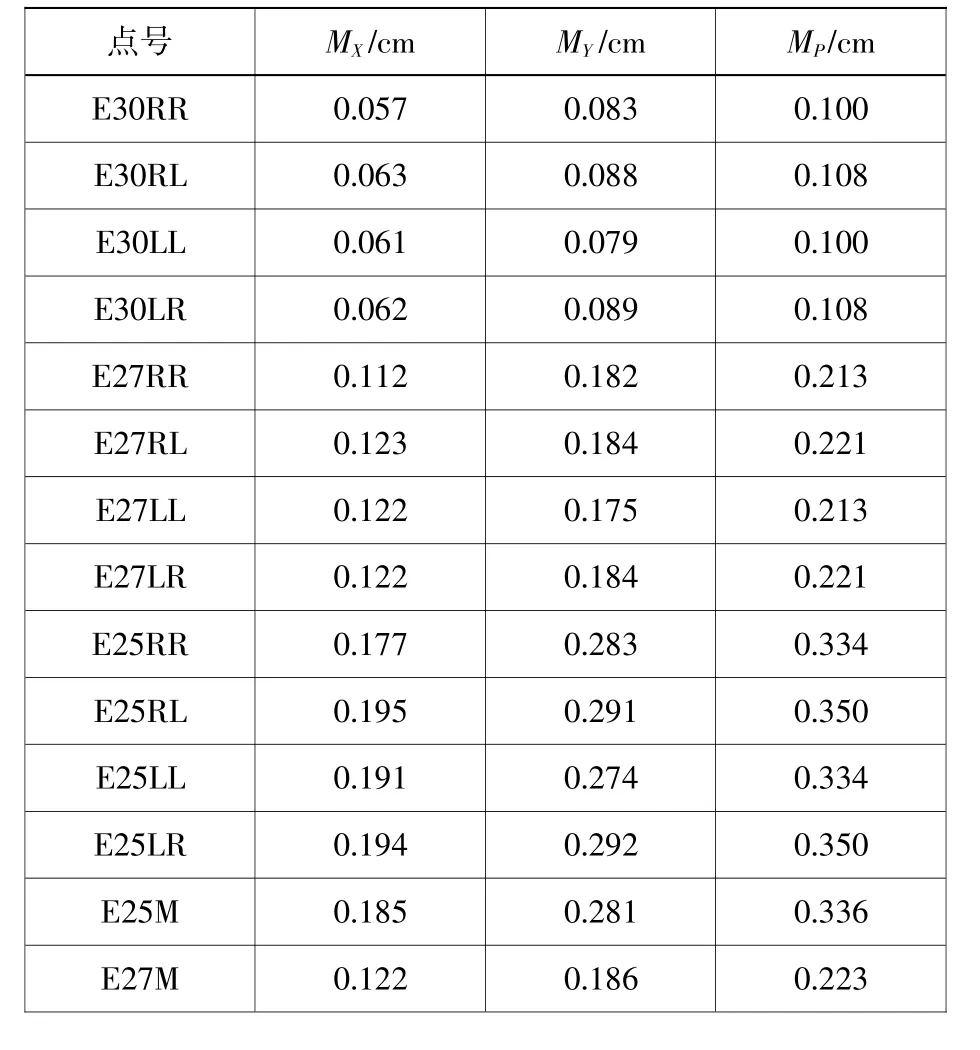
表2 东人工岛端各点模拟计算点位精度Table 2 Simulation and calculation of point position accuracy at each point of east artificial island
综合洞外定向边和洞内控制网按照双线形联合锁网布网引起的横向贯通误差,总的贯通测量误差为mm=±18.55 mm,满足深中通道沉管隧道贯通精度50 mm要求。
5 结语
深中通道沉管隧道贯通面西端E1—E10贯通测量导线网已测量了10期,通过历期比对,贯通测量导线末端点X、Y最大偏差为0.2 mm和2.9 mm,平均偏差为0.1 mm和1.4 mm,贯通导线测量精度稳定,结果可靠。
在堰筑段施工完成后,通过施工通道进入堰筑段内部对投点成果进行精度检核,采用全站仪极坐标法测量坐标与“投点+GNSS静态观测”成果做比较,中管廊点位X、Y最大差值分别为-2.0 mm和1.3 mm、左行车道点位X、Y最大差值分别为-0.7 mm和1.1 mm、右行车道X、Y最大差值分别为-0.1 mm和1.3 mm。考虑到全站仪测量和投点与GNSS静态观测的测量误差,成果差值在理论分析的误差范围之内。
通过深中通道沉管隧道贯通面西端E1—E10管节安装贯通测量实践检验与东端点位偏差检核结果分析看,说明研究设计的沉管隧道贯通测量方案总体科学,其精度和可靠性满足深中通道沉管隧道贯通测量的技术要求,可以继续指导深中通道后续沉管隧道贯通测量施工。