水下仿生机器人设计与实现
2022-09-20朱万浩章盼梅孔令棚张紫凡
朱万浩,章盼梅,孔令棚,张紫凡
(1.广州城市理工学院电气工程学院,广东广州 510800;2.广州城市理工学院机械工程学院,广东广州 510800)
0 前言
随着我国综合国力的不断提升,船舶工业得到了快速发展,各地大量新造或改造了各种舰船。为保证舰船运行的安全,工作人员需定期对它进行检修。舰船水下部分出现问题时,若工作人员携带设备潜入水中,不但检修困难且存在一定的安全隐患。近年来,随着半导体芯片、自动控制技术等的快速发展,为机器人发展提供了一定的技术支撑。利用机器人代替人工检测舰船水下部分,不但可提高检测效率,而且能减少检修工作的安全隐患。
当前国内外部分学者对水下仿生机器人的机械结构、控制系统、路径规划等进行了研究,以寻求反应更灵敏、运行更可靠、工作更智能的机器人。文献[2]设计了一台基于多传感器的水下机器人,该机器人具有路径规划、自动导航等功能,能实现对海洋目标的自动监测。文献[3]设计了一台新颖的水下球形机器人,用于探索与绘制水下矿井地图,文中介绍了机器人的总体概念设计,设计了制导等子系统。文献[4]设计了一台服务于海底电缆检测的水下机器人,通过模块化设计提高了系统的稳定性,分析了系统的总体架构,详细设计了各系统子模块。文献[5]研究了一种应用在船舶焊接焊缝检测中的多传感器水下机器人,该机器人能快速发现焊接质量问题,提高了检测效率。文献[6]提出了一种新型的水下机器人,分析了机器人的结构外形、抗压水密性等,最后对样机进行了实验。
为解决大型舰船水下部分检修的难题,提高舰船的检修效率,本文作者仿乌龟游泳的特性,设计一台水下仿生机器人,并用实验验证其可行性。
1 总体设计
水下仿生机器人总体框架设计由机械结构、控制系统、数据中心组成。机械结构部分主要采用SolidWorks软件建立仿生机器人的3D模型,然后采用3D打印测试的样机。控制系统主要负责监控仿生机器人运行,是机器人的核心部分,由检测系统、图像采集系统、运动控制系统、能源系统、通信系统、定位系统、故障自愈系统组成。数据中心主要保存水下仿生机器人运行的相关数据信息,由实时数据、用户数据、历史数据组成。水下仿生机器人总体设计如图1所示。
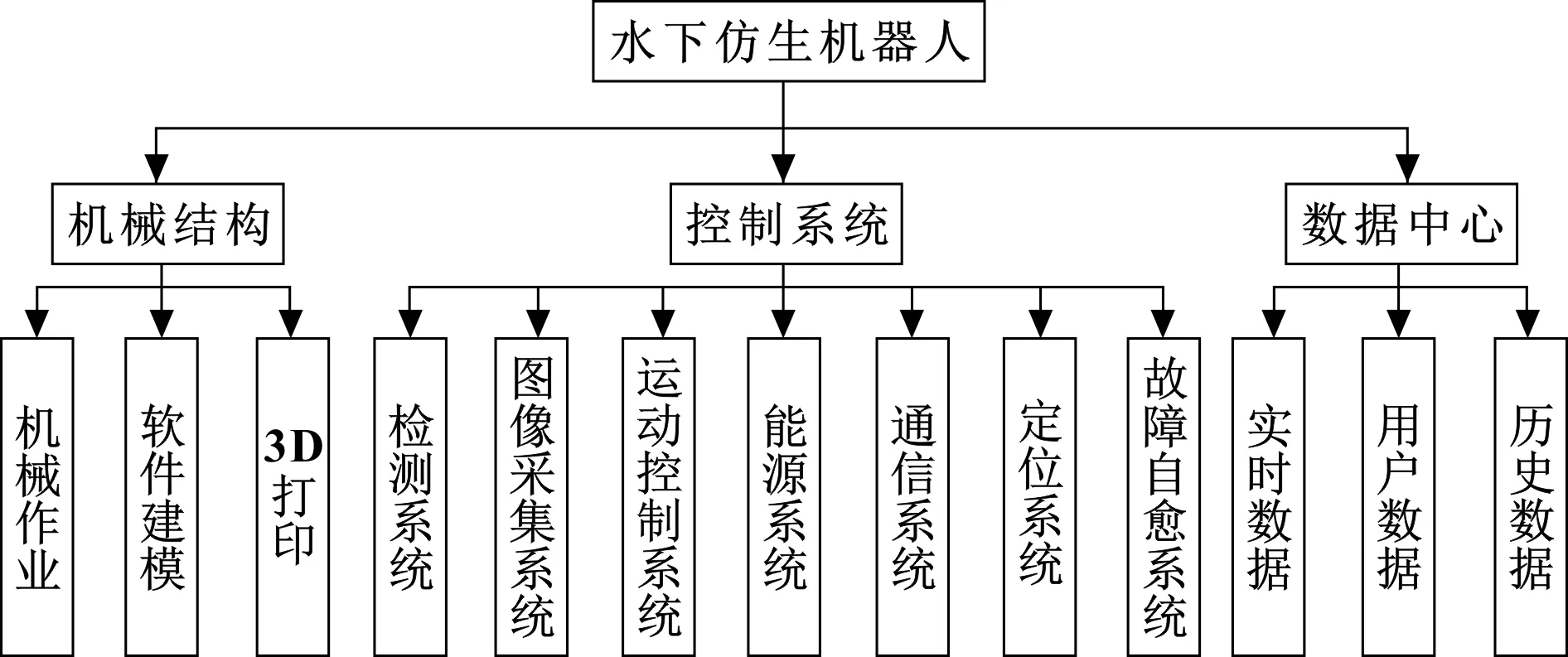
图1 水下仿生机器人总体设计
2 机械结构设计
水下仿生机器人建模时,设计思路是先整体再局部,接着确定模型的大致框架,最后再细分组成每个配件所需的零件。根据需求绘制各个零件草图,最终通过装配形成模型装配体。
水下仿生机器人的机械结构严格按照建模方法进行模型搭建,按照仿生乌龟游泳的原理,积极向生物界寻求设计灵感与启发。根据对生物进行合理的模拟设计,通过形态仿生设计,使水下仿生机器人更好地满足当下社会的个性化需求。同时,该设计还从流体力学角度出发,依据流线型化达到减少运动阻力的目的。水下仿生机器人SolidWorks模型如图2所示。
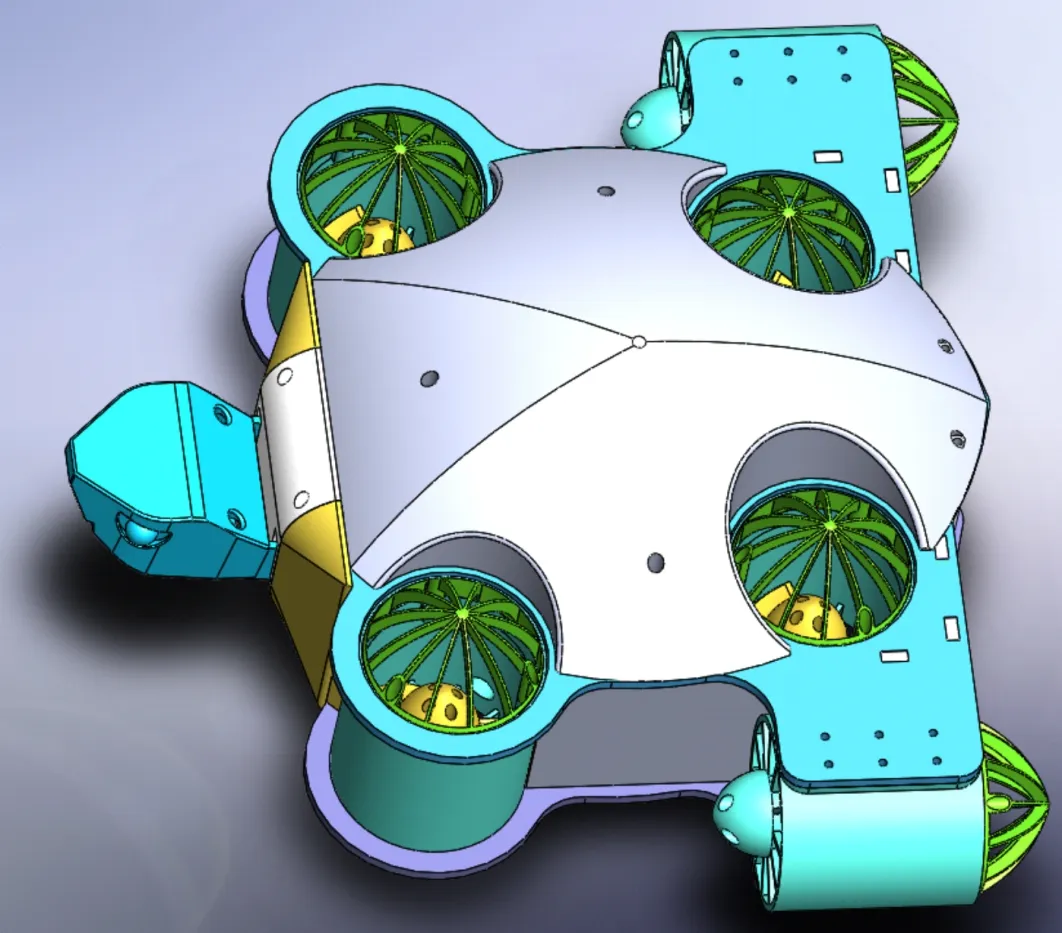
图2 水下仿生机器人Solid-Works模型
2.1 推进器机械结构设计
推进器由进口管道、叶轮轴套、叶轮和喷口组成。它的工作原理是向运动的反方向进行水流喷射,喷射的水流具有一定的速度,从而使推进器运行。从物理学作用力的角度分析,此时的水下仿生机器人受到的推力是一种合力。该合力等于水流的反作用力,由推进器内表面上所受到的压力和剪切应力在喷口面积矢量相反方向上的合力。一般来说,推力的大小与单位时间内流经推进器的动量变化率相等。
该设计采用4个竖直方向和2个水平方向的推进器,其中竖直方向上的推进器称为平衡推进器,要求在对角线上的2个平衡推进器旋转方向一致,而不在对角线上的2个平衡推进器旋转方向相反,也即相邻的2个平衡推进器旋转方向是相反的;水平方向上的推进器称为前进推进器,2个推进器旋转的方向相反。当4个平衡推进器旋转方向一致时,由于反作用力的作用,水下仿生机器人会绕着竖直方向的中心线产生自转的现象;当2个前进推进器旋转方向一致时,也会绕着推进器前进方向产生自转的现象。推进器模型如图3所示。
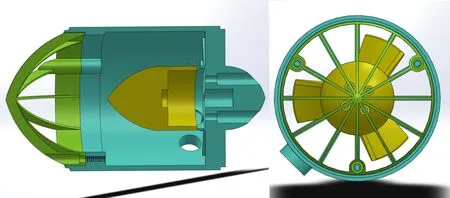
图3 推进器SolidWorks建模
2.2 力学分析
水下仿生机器人共选用6个推进器,其中前进推进器的数量有2个,平衡推进器的数量为4个。当推进器未工作时,仿生机器人水平浮在水面。若要仿生机器人沿直线移动,则需使两端前进推进器保持相同的速度。若要实现转弯,则使两侧的前进推进器产生差速即可实现,当某一端前进推进器转速慢时,仿生机器人则往该端偏转。若要实现仿生机器人的下沉上浮时,根据物理学中的阿基米德原理可知,当仿生机器人完全浸入时,排开水的体积最大,所受的浮力也最大。因此,为克服浮力的增大,则需开启平衡推进器,使得>。当仿生机器人浮力大于重力、4个平衡推进器保持一致且旋转速度向上排水时,仿生机器人就会平稳下潜。正常情况下,仿生机器人在水下保持水平状态,当然,在控制系统的控制下,也可在水下保持其他任意姿态,例如前倾和后仰等。其受力分析如图4所示。
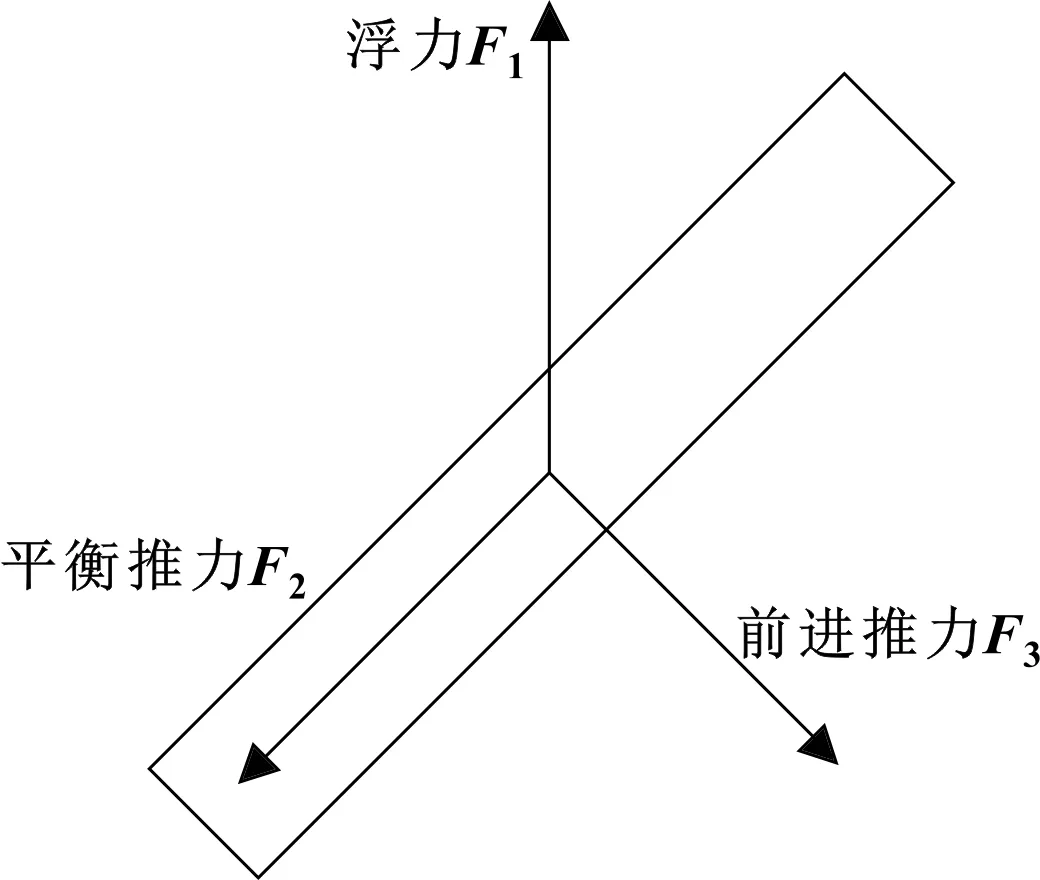
图4 仿生机器人水下力学分析
为仿生机器人在水下所受到的浮力,为平衡推进器的推力,为前进推进器的推力。当水下仿生机器人潜入水中时,排开水的体积一定,所受的浮力则为恒力,且浮力的方向总是竖直向上的。因此,可通过调节推进器的推力、,使两者的合力与大小相等、方向相反即可保持机器人的平衡状态。是4个平衡推进器的合力,把拆分成两部分:仿生机器人前方2个平衡推进器的合力和后方2个平衡推进器的合力。=+,当<1时,仿生机器人开始前倾,这一过程由于受力方向的改变,要时刻保持、和的合力为0。当仿生机器人前倾角度到达设定位置后,使和处于动态相等的状态,即可完成前倾任意角度的控制,前倾过程需结合角度检测模块才能正常工作。
3 控制系统设计
控制系统是水下仿生机器人的重要组成部分,由硬件系统部分和软件系统部分组成。仿生机器人工作时,硬件系统和软件系统相互协调工作,实现机器人的智能工作。
3.1 硬件系统设计
水下仿生机器人采用STM32控制器为中央处理器,负责整个系统的数据采集、运算和通信处理。硬件系统的外围电路包括无线模块、摄像头模块、陀螺仪模块、超声波模块、电调模块等,各个模块在STM32控制器的指令下协调运行。GPS定位模块用于定位仿生机器人在水中的位置,超声波传感器用于判断前方是否有障碍物,摄像头模块用于拍摄舰船表面,然后通过算法判断是否需进一步检测。仿生机器人工作时,超声波传感器、温度传感器等模块采集现场的环境参数,并把数据转换为电信号发送到STM32控制器中。STM32控制器根据预设的程序和算法,对输入的信号进行处理,然后将处理结果发送给摄像头、电调等模块,控制仿生机器人的运行。硬件电路总体架构如图5所示。

图5 硬件系统总体架构
3.2 软件系统设计
水下仿生机器人软件系统设计采用C语言进行编程,包括主程序设计、子程序设计和遥控器程序设计。系统设计时,需综合考虑仿生机器人在水中运行时会遇到的情况,针对不同的情况设计不同的运行方式。另外,设计人员的思路和算法会影响到仿生机器人的运行效率,需不断地调试程序。
3.2.1 主程序设计
水下仿生机器人启动后,首先进行硬件的自检,然后进入主程序。通过主程序调用各子程序,实现仿生机器人的智能工作。软件系统的子程序包括图像识别系统子程序、运动控制子程序、自动检测子程序、故障诊断自愈子程序等。当仿生机器人在水中检测到特定的信号时主程序发生中断,根据预设的程序调用子程序。当子程序执行完毕之后,跳出中断,返回到主程序继续执行其他命令。仿生机器人主程序流程如图6所示。
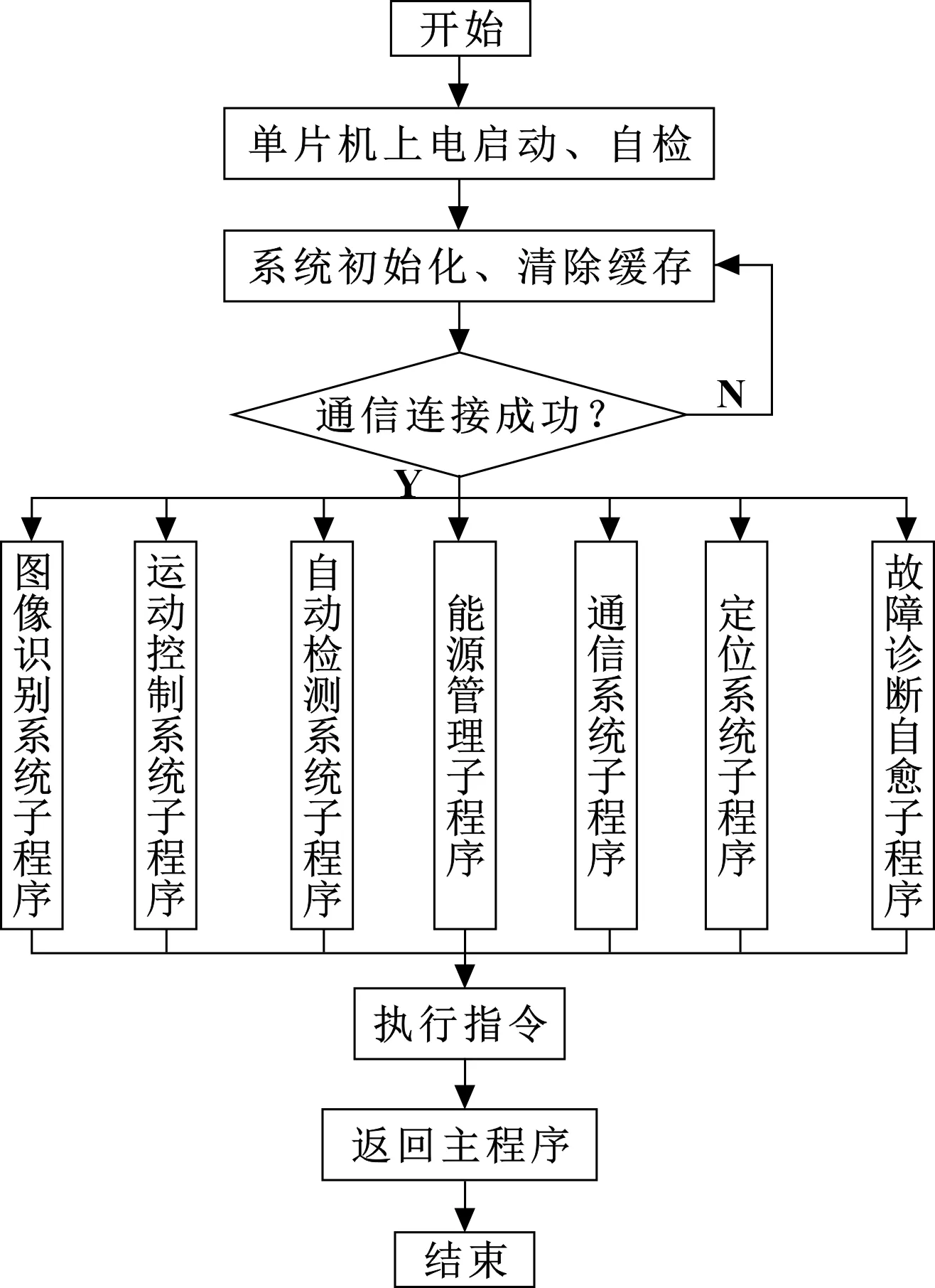
图6 主程序设计流程
3.2.2 遥控器程序设计
水下仿生机器人有两种工作模式:一种是手动运行模式,即操作人员在岸上通过遥控器控制它运行;另一种是自动运行模式,仿生机器人按照内部设定好的程序自动运行。当采用手动模式时,开启遥控器电源,单片机内部系统初始化,单片机所有I/O口进行双向口初始化且呈高阻抗状态。初始化无线模块并将它设置为发送模式,同时清除模块缓存,然后设置无线模块传输通道、存储地址等。当检测到按键按下时,单片机将按键值发送到发送缓冲区,然后进行读取状态寄存器数据、读取无线模块数据和清除外部中断操作。遥控器程序设计流程如图7所示。
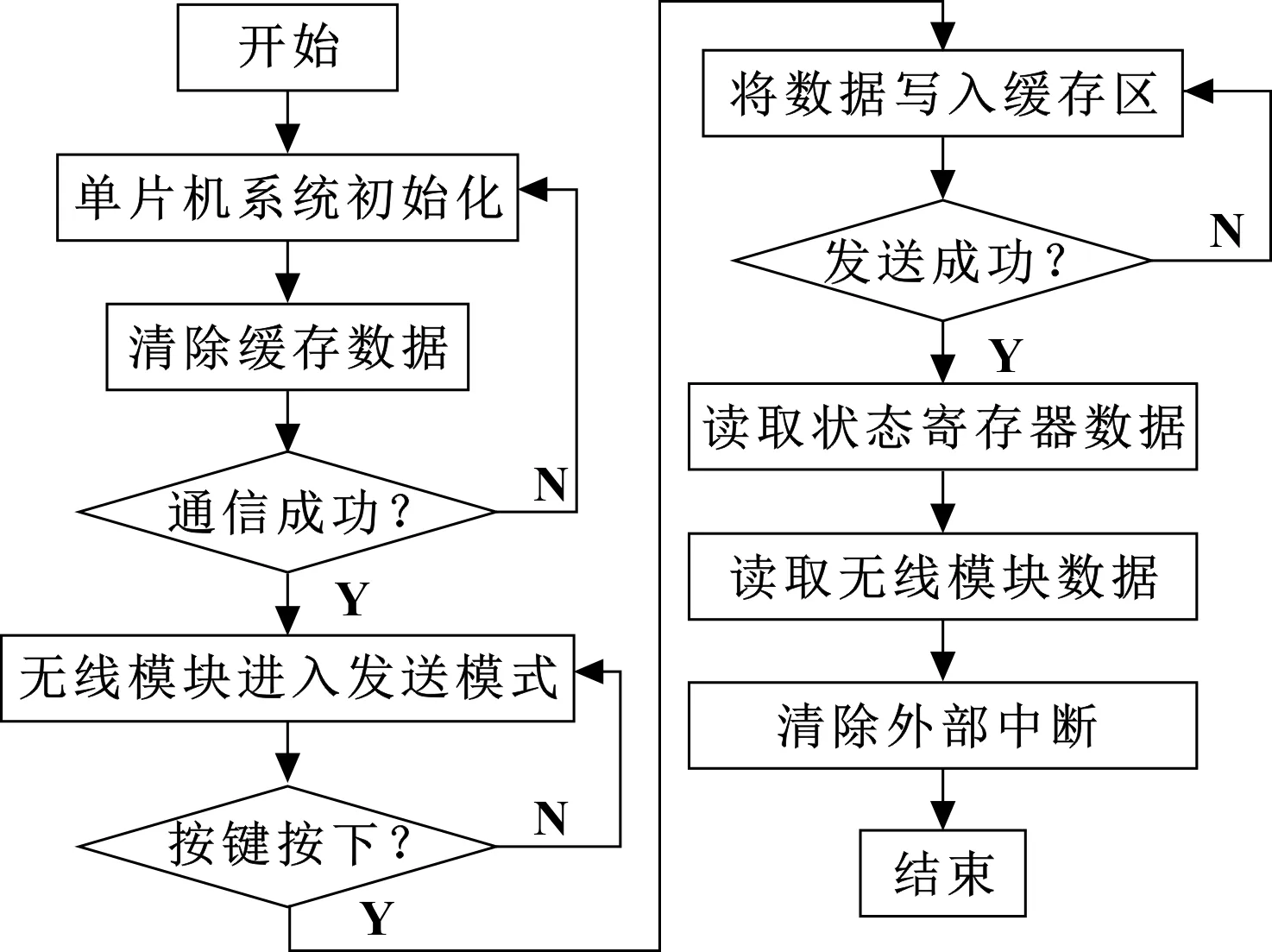
图7 遥控器程序设计流程
4 样机测试
设计完成之后,为验证设计效果,进行水下仿生机器人样机测试。测试前的相关工作包括采用3D打印机打印机械模型、购置相关的控制模块、焊接电路板、组装整机等。
4.1 功能测试
功能测试环节主要测试水下仿生机器人的各个按键、各项功能是否正常。测试前,先检查样机、遥控器的外观是否完好,推进器等部件粘贴是否紧密;然后,给样机通电测试,进行系统的初始化;最后,进行样机的按键、功能测试。测试时,把样机放进测试的湖面,打开样机和遥控器电源,点击启动按钮,样机电源信号灯闪亮,系统初始化工作;点击停止按钮,样机电源信号灯熄灭,系统停止运行;旋转遥控杆前进、后退、左转、右转方向,样机进行相应的动作;长按下潜按钮,样机潜入水中,长按上浮按钮,样机在水中往上浮。样机如图8所示。
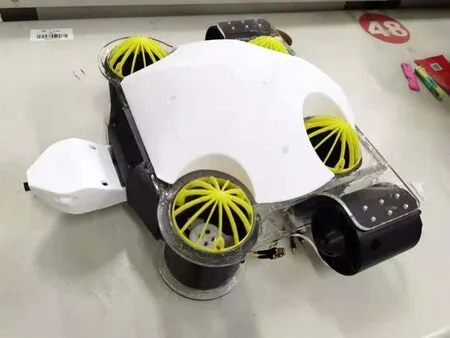
图8 水下仿生机器人样机
4.2 性能测试
性能测试主要包括三方面:控制距离、潜水深度、运行速度。控制距离主要指遥控器控制仿生机器人的距离和摄像头传输视频到岸上监控端的距离。测试发现,当在空旷的湖中时,最大控制/传输距离为200 m,随着障碍物的增多,控制/传输距离会缩短。潜水深度主要测试仿生机器人的耐压能力,检测仿生机器人是否良好,有无出现进水情况。运行速度主要测试仿生机器人的反应灵敏度、加速度和速度。
4.3 存在的问题
测试结果表明,该设计可基本实现水下仿生机器人的功能,达到设计要求。但是,该设计也存在一些问题,例如:电池的续航能力不足,后期需更换大容量电池和增加电池数量来增加续航能力;摄像不够清晰、无法多角度拍摄,后期需更换高清摄像头和增加摄像头数量。
5 结束语
本文作者设计了一台仿生乌龟游泳的水下机器人,采用SolidWorks软件建立3D模型并用3D打印机打印样机。分析了该机器人在水中运行的受力情况;详细设计了控制系统的硬件部分和软件部分。样机测试结果表明,该仿生机器人反应灵敏、运行稳定,能潜入水中检测大型舰船,为技术人员开发水下仿生机器人提供参考。
