配网带电作业机器人系统的设计
2022-09-20李光茂杨森占鹏陈勉之乔胜亚
李光茂,杨森,占鹏,陈勉之,乔胜亚
(广东电网有限责任公司广州供电局电力试验研究院,广东广州 510410)
0 前言
带电作业是指在高压电气设备上不停电进行检修、测试的一种作业方法,是电网设备检测、检修维护和改造的重要手段和方法,是保证电力系统可靠稳定运行的重要技术措施。从我国第1次带电作业实践至今,带电作业研究和应用在我国已有60多年的历史,为保障电网安全可靠运行及提高经济效益发挥了重要作用。
由于10 kV配电线路中相间距、相对地距离的限制,检修中发生人员触电伤亡的事故率相对其他作业较高。针对目前带电作业主要仍是人工操作的实际情况和10 kV配电线路带电作业“机器人换人”需求,由主从遥操作液压机械臂、智能感知系统、带电作业机器人工具系统、绝缘防护系统组成的配网带电作业主从遥操作液压机械臂在配网带电领域有广阔的应用空间和实际意义,不仅可以使操作人员远离危险系数高、劳动强度大的工作,从而有效避免带电作业时人员伤亡事故的发生,提高带电作业的安全性和作业效率;同时还可以提高电网的运行质量,进一步减少供电系统的人员投入,降低人员成本,具有巨大的经济效益和社会效益。
1 配网带电作业机器人系统构成及技术参数
1.1 系统构成
配网带电作业机器人系统组成如图1所示,配网带电作业机器人系统由主从遥操作液压机械臂、智能感知系统、绝缘防护系统、绝缘斗臂车、带电作业工具系统和控制系统组成。主从遥操作液压机械臂采用绝缘斗臂车平台安装方式,适合城镇道路附近的室外作业;主从遥操作液压机械臂由两个遥操作主手和两个液压机械臂组成,一对一主从位置闭环随动控制。智能感知系统包括视觉系统和力反馈系统,力觉临场感由力反馈遥操作主手反馈给操作人员实现。带电作业工具系统包括专用工具、标准快换接口、标准动力座。控制系统采用主控制器+多轴运动控制器,与位置传感器、压力传感器、液压伺服阀和液压执行件组成电液伺服系统。控制方式采用主从遥操作为主,自主运行为辅。

图1 配网带电作业机器人系统组成
配网带电作业机器人系统示意如图2所示,系统实物如图3所示。
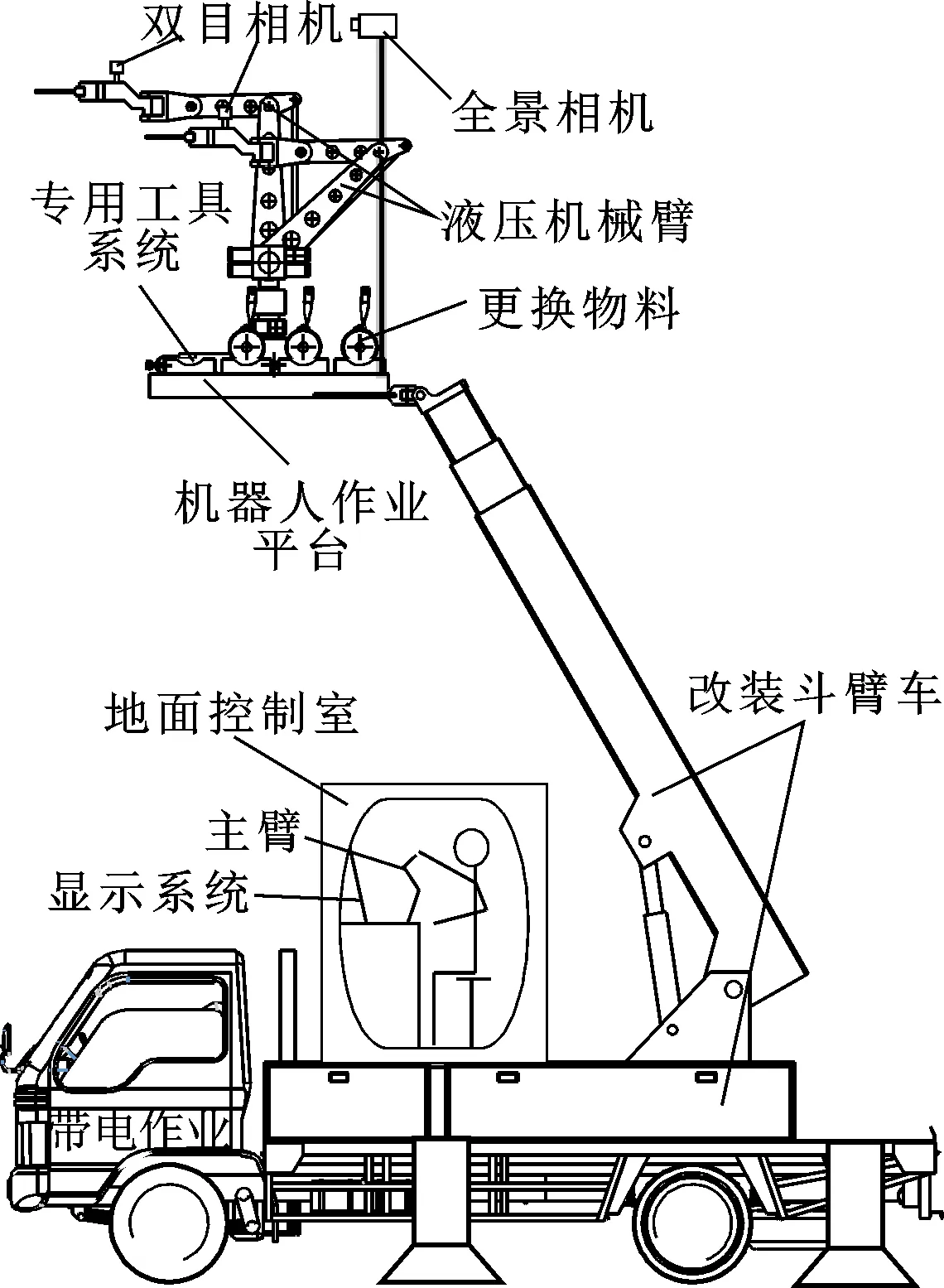
图2 配网带电作业机器人系统示意

图3 配网带电作业机器人系统实物
1.1.1 主从遥操作液压机械臂
(1)液压机械臂
液压机械臂采用全液压驱动,主从位置闭环随动控制。全液压驱动的液压机械臂自重小,持重大,惯性小,换向冲击小。各关节执行部件均装有压力传感器和角位移传感器,实时测量各执行部件参数,并反馈至多轴运动控制器和主控制器。液压机械臂仅需一个电气接口以及一进一回两路液压油路接口;伺服阀和压力传感器都封闭在液压机械臂内部,适合油管布局;液压机械臂集成在绝缘斗臂车上,利用绝缘斗臂车上的工具油路,加上过滤装置及控制阀组,为液压机械臂提供动力。液压机械臂设计框图如图4所示,技术参数如表1所示。

图4 液压机械臂设计框图
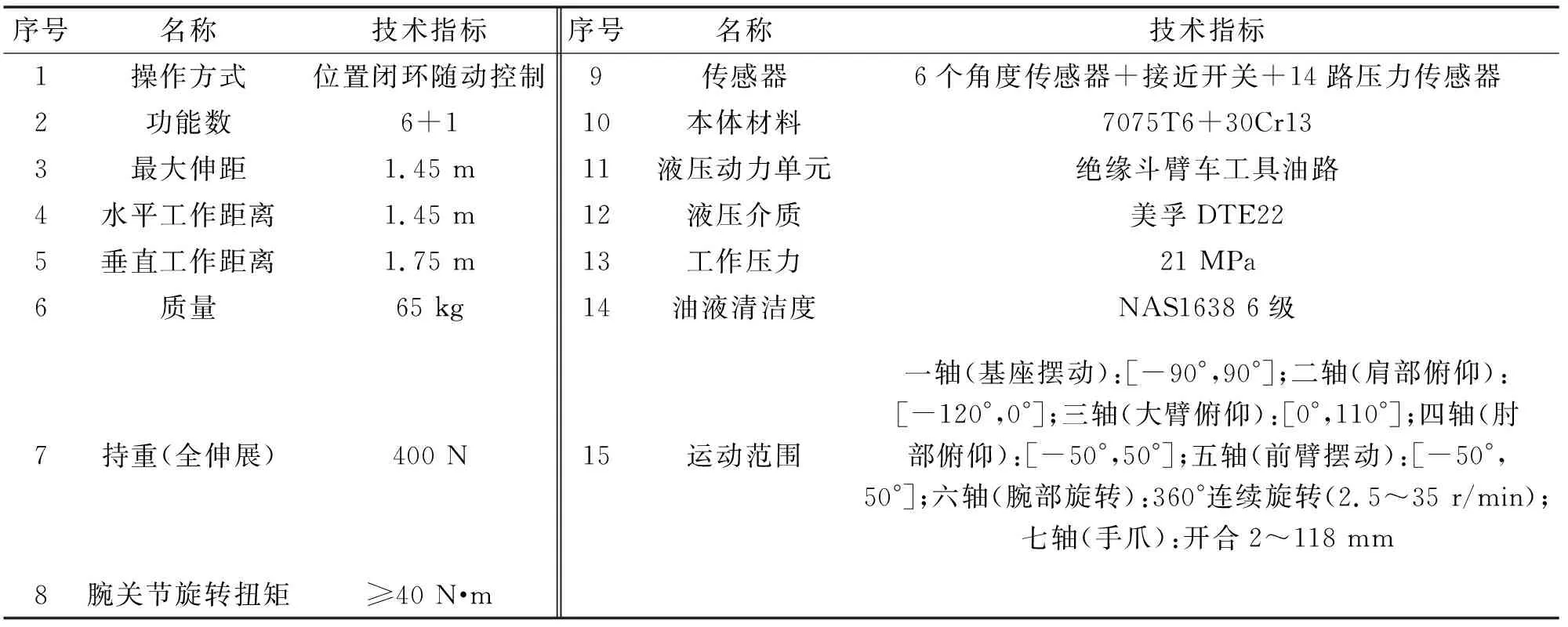
表1 液压机械臂技术参数
(2)遥操作主手
遥操作主手(简称“主手”)见图5,各个关节安装有力矩电机,用于远程操作液压机械臂,适用于具有6个转动关节的液压机械臂的操作,且主手操作手柄能够通过手柄上按钮控制液压机械臂各轴锁定功能及控制末端工具。

图5 遥操作主手
力反馈实现。力反馈的力矩电机电流由负载决定的关节扭矩和主从手运行时角度差折算;控制系统通过液压机械臂的压力传感器和执行件参数计算出关节扭矩,并减去编码器测得液压机械臂姿态时各关节的重力力矩,核算出负载力矩,并按比例转换成遥操作主手的力矩电机电流,实现力反馈功能,并且叠加主从手之间的运动时角度差折算成力矩电机电流,实现阻尼力反馈,传递给操作人员。
1.1.2 控制系统
控制系统基于工业机器人的控制器平台进行开发,控制方式有主从遥操作和自主运行两种,遥操作时可以对液压机械臂单关节进行控制。将遥操作主手作为系统的外部输入设备,采用主控制器+多轴运动控制器,与位置传感器、压力传感器、电液伺服阀和液压执行件组成电液伺服系统。控制系统还包括作业监控系统、视频管理系统和主手控制系统。控制系统技术参数如表2所示。

表2 控制系统技术参数
1.2 技术参数
配网带电作业机器人技术参数如表3所示。

表3 配网带电作业机器人技术参数
2 工作原理
主从遥操作控制原理如图6所示,控制系统结构如图7所示:操作者操作主手运动,控制器通过主手力矩电机位置信息的信息采集、A/D转换、滤波处理后得到主手当前位姿,通过光纤通信发送给液压机械臂控制器,同时液压机械臂多轴运动控制器接收液压机械臂各个关节位置信息,经过处理后与主手位置进行比较;比较后的信号D/A转换后经过液压放大器与电液伺服阀驱动模块连接,驱动各个轴运动,实现对液压机械臂的位置闭环控制。

图6 主从遥操作原理

图7 控制系统结构
自主运行原理。自主运行是指视觉引导下的自主运动;建立液压机械臂D-H坐标系及其D-H参数,通过运动学正解算法根据关节角度值得到末端位姿值;通过运动学逆解算法根据末端位姿值得到关节角度值;通过相机标定算法得到相机坐标系在液压机械臂基坐标系下的表示。相机识别目标点,得到目标点在相机坐标系下的表示,目标点在液压机械臂基坐标下的表示=·;通过轨迹规划,完成各个轴时间相等的速度规划;然后通过插补得到每个插补周期的关节角度值,液压机械臂运动到目标点。
液压机械臂的液压原理如图8所示。液压机械臂的液压系统是典型的电液位置伺服控制系统。其中肩部、大臂、肘部、前臂和手爪处都安装有液压缸,通过对称流量伺服阀控制非对称液压缸的伸缩分别实现液压机械臂肩部绕基座俯仰、大臂绕肩部俯仰、肘部绕大臂俯仰、前臂绕肘部左右摆动及手爪的伸缩开合5个自由度的运动;肩部伸缩油缸安装有外控液控单向阀,实现关节执行器液压系统关闭时的位置锁定功能,并在系统供油后,供油压力打开液控单向阀,不影响伺服阀对肩部伸缩油缸的位置闭环控制;在基座安装摆动缸,腕部安装液压摆线马达,分别实现肩部绕基座的左右摆动和腕部绕自身轴线的转动。

图8 液压机械臂液压原理
3 配网带电作业机器人系统的性能和结构特点
配网带电作业机器人系统具有以下结构和性能特点:
(1)大负载比液压机械臂。液压机械臂采用主从位置闭环随动控制,自重小650 N,持重大400 N,自重负载比达到0.62;惯性小,换向冲击小,抗干扰能力强;方便集成在绝缘斗臂车上并利用绝缘斗臂车上的工具油路为其提供动力。
(2)智能感知系统给操作人员提供视觉感知和力觉临场感。由视觉系统和力觉反馈系统支撑。机械臂上安装的双视觉相机和作业工作台上安装的全景相机为操作人员获得三维位置信息;同构力反馈主手实现力觉临场感,操作者可以根据力觉反馈信息掌握作业机械臂的动作状态。在进行主从遥操作配网带电作业任务时,通过遥操作将操作者的智能映射到任务空间,依靠人的智能和经验实现对液压机械臂的控制,提高带电作业的安全性和作业效率。
(3)合适的液压伺服控制算法。液压多轴运动控制器嵌套液压伺服控制算法,包括变增益PID调节、主动阻尼、速度前馈、滑模模糊控制技术,不同的驱动关节采用合适的算法,提升液压机械臂液压阻尼比和刚度,改善液压机械臂的稳定性和跟踪性能。
4 结语
配网带电作业机器人系统使操作人员远离危险环境,保障作业人员安全,减轻劳动强度,提高工作效率。目前系统主从遥操作加自主运行工作模式的专用液压机械臂的研发设计,会大大提升带电机器人系统的合理性和经济性。通过现场试验,也验证了本系统的合理性。本配网带电作业机器人系统的推广和应用,提高了带电作业的安全性和自动化水平,具有巨大的经济效益和社会效益。“十四五”期间将是中国机器人产业发展的关键时期,把握国际机器人产业发展趋势,汲取他国先进经验,研制出符合中国电网的配网带电作业机器人并取代传统的人工作业将是历史必然。
