架空线路走廊树枝切割机器人研究
2022-09-20黄良玉吴功平吴俊峰
黄良玉,吴功平,吴俊峰
(武汉大学动力与机械学院,湖北武汉 430072)
0 前言
架空线路外部安全隐患的调查统计数据表明:由树枝造成的安全隐患占了总隐患数的一半左右,树枝过度生长已经成为威胁线路安全运行的主要因素之一。目前采取的自动化手段是车辆辅助修剪和直升机搭载修剪设备修剪。前者对作业环境要求较高,只能在相对平坦的地面进行作业且高处树枝无法顺利修剪;后者修剪成本高,且只能修剪线路两侧的树枝,无法修剪线路下方的树枝。因此,研究具有实用性的架空线路树枝作业机器人已成为迫切需求。
加拿大科学家Michel PAQUETTE设计的悬挂式自动乔木修剪机以车辆为基体通过搭载作业设备的方式完成对树枝的修剪,该设备由于车辆的限制无法进入山区执行修剪任务。日本科学家UEKI等研制出沿树干攀爬的轻质攀爬式剪枝机器人,该机器人由滚动爬升机构、链锯执行机构和控制器三部分组成,滚动爬升机构为机器人提供向上行驶的动力,同时链锯周向旋转切割树枝。这种构型的机器人只能沿笔直树干作业,多用于景观树木的修剪。国内外对沿线路行走的树枝修剪机器人研究较少,福建泉州的智勇达公司设计了一款架空输电线路自动修剪树枝机器人,该机器人由移动机体、V形绝缘臂与和修剪系统三部分组成,移动机体沿线路行走时,修剪系统的两对刀片做高速旋转运动完成对树枝的修剪,但刀片修剪效率较低且无法调整修剪系统与树枝的距离。武汉大学机器人研究所研制的树枝修剪机器人由移动机器人与超长绝缘臂和修剪组成,该机器人修剪效率较高,但由于摆臂角度有限而无法完全覆盖所需修剪范围,同时作业末端也无法调整修剪姿态。
针对上述问题,作者设计一款沿架空高压线路行走的树枝切割机器人,通过分析风对线路的影响得到了线路走廊的理论修剪区域,提出了树枝切割机器人原理构型;以110 kV高压线路为例,在SolidWorks中设计了机器人的虚拟样机,并针对两种工况进行作业规划;利用D-H参数法建立机器人运动学模型,通过坐标变换求解机器人运动学正解,并依据蒙特卡罗法得到机器人理论作业空间,通过与理论修剪区域对比验证了该构型设计的合理性;研制的实验样机在自建线路上进行了模拟作业试验,试验结果表明它能有效完成修剪树枝的任务,实用性强。
1 树枝切割机器人原理构型
架空输电线路走廊树枝的修剪作业主要针对导线周围的树枝。影响导线与线路走廊两侧树枝间距离的主要影响因素是风,一般情况下有微风振动以及风偏两种形式。微风振动振幅一般在架空线直径的3倍以下;风偏是指架空线受横向风力的作用,偏离其垂直位置的现象。
以导线轴线上任意一点为坐标原点,竖直向上为轴正方向,水平向右为轴方向建立坐标系。图1为在风偏及微风振动的影响下可能偏移到的极限位置截面,为导线在无风状态下任意一点的位置,为点处导线的自然弧垂,、表示风偏作用下导线左偏与右偏所能达到的极限位置,、表示微风振动作用下导线所能达到的极限位置,、分别表示导线的直径以及风偏角。
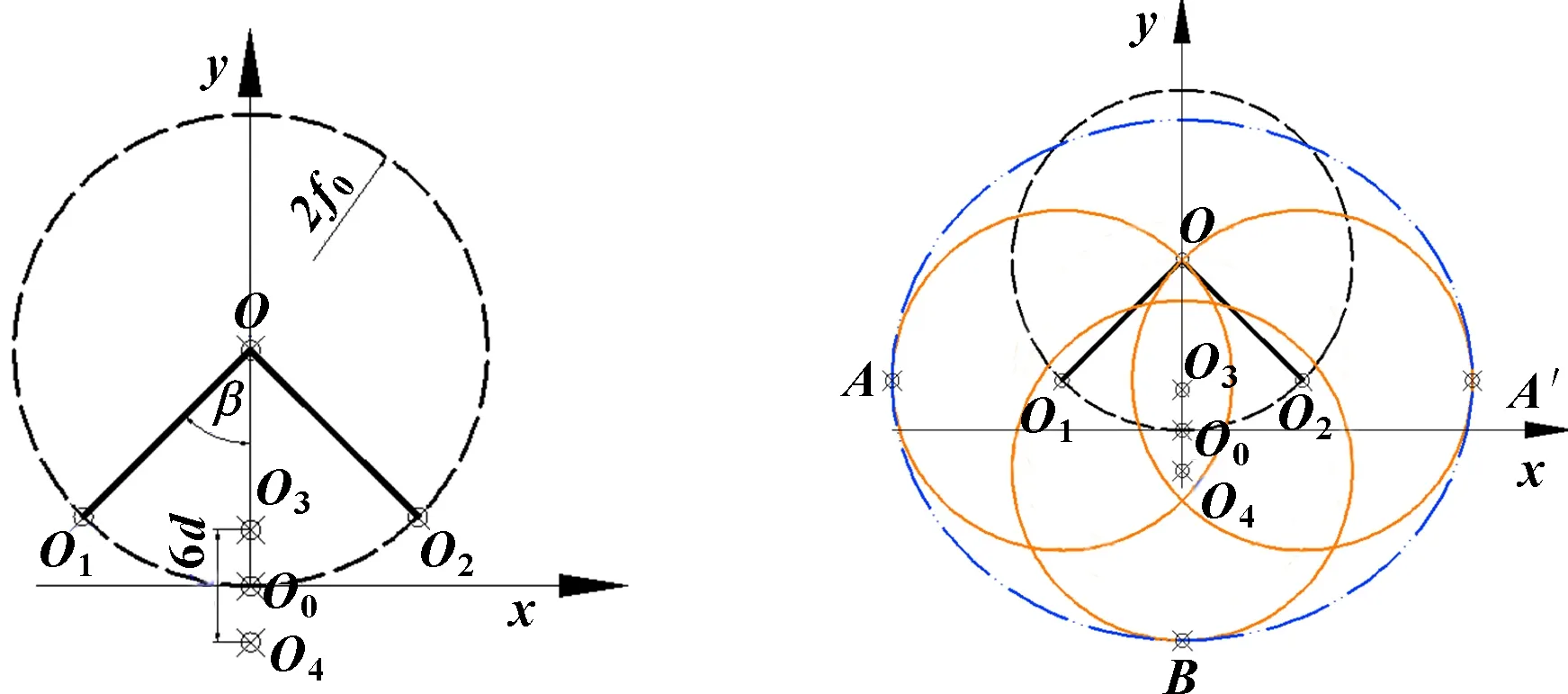
图1 导线偏移的极限位置 图2 理论修剪区域
分别以、、、以及五个点为圆心,架空线路的电气安全距离为半径作圆,则这5个圆所包络区域即为所需修剪区域,以椭圆来拟合该包络区域,分别以圆和圆的左端点和右端点′为椭圆长轴的两端点,以圆的下端点为椭圆的短半轴端点,得到的理论修剪区域如图2所示。由于实际线路周围的树枝一般分布在导线下方以及两侧,利用平面几何知识可以推导出导线上某一点理论修剪区域为

(≤0)
(1)
线路通道里的树枝生长情况较为复杂,树枝粗细不一、姿态各异。基于上述理论修剪区域提出了沿线路行走的树枝切割机器人原理构型,如图3所示。该机器人包括5个部分,共有8个关节,分别为:行走机构,由2个行走关节构成,为机器人行走以及爬坡提供动力;水平回转机构和铅垂俯仰机构,分别调节作业端在水平面与铅垂面的位姿;末端回转机构,调整末端作业装置的位姿,特别是夹爪的姿态以便于进刀;末端切割装置,包括锯片自转、曲柄回转以及夹爪夹紧松开3个自由度。该套作业装置既能实现对细树枝的扫切又能实现对粗树枝的夹持切割,可以有效地对线路通道内的树枝实现全面修剪。
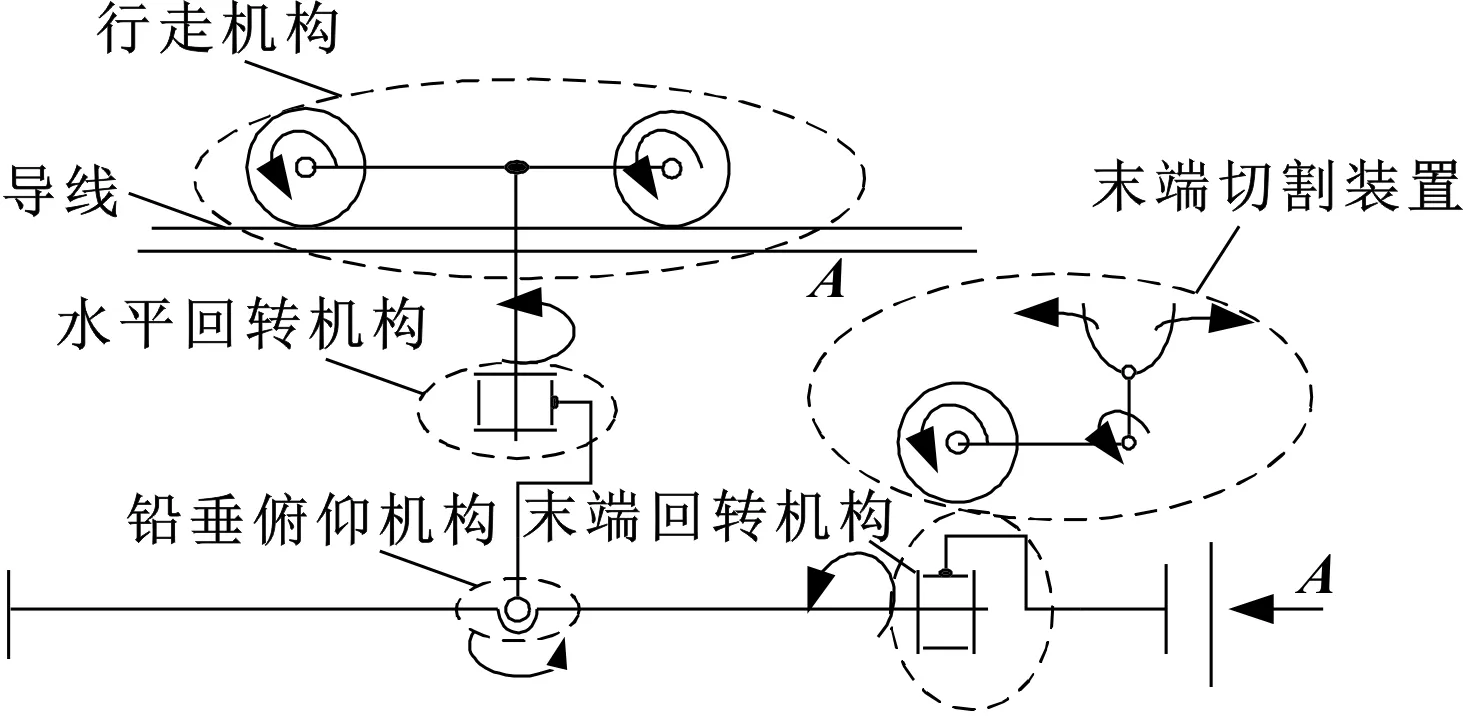
图3 树枝切割机器人原理构型
2 机器人虚拟样机及作业规划
2.1 机器人虚拟样机
在考虑树木自然生长速度的情况下110 kV线路导线与树木之间的最小电气安全距离为4 m。根据上述树枝切割机器人原理构型设计了机器人的虚拟样机模型,如图4所示。机器人行走机构双轮同侧悬挂于导线上,包括行走轮、主横臂、L形支架三部分,行走轮采用空心轮毂结构,L形支架连接在主横臂中央,其底部开有槽通孔,可通过调整水平回转机构的连接位置来调节整个机器人的重心位置。由于机器人运动时负载大,因此水平回转机构、铅垂俯仰机构以及末端回转机构均设计成蜗轮蜗杆传动来增大输出转矩,集成控制箱布置在作业长臂作业端的另一侧,用以平衡作业端重力产生的力矩。
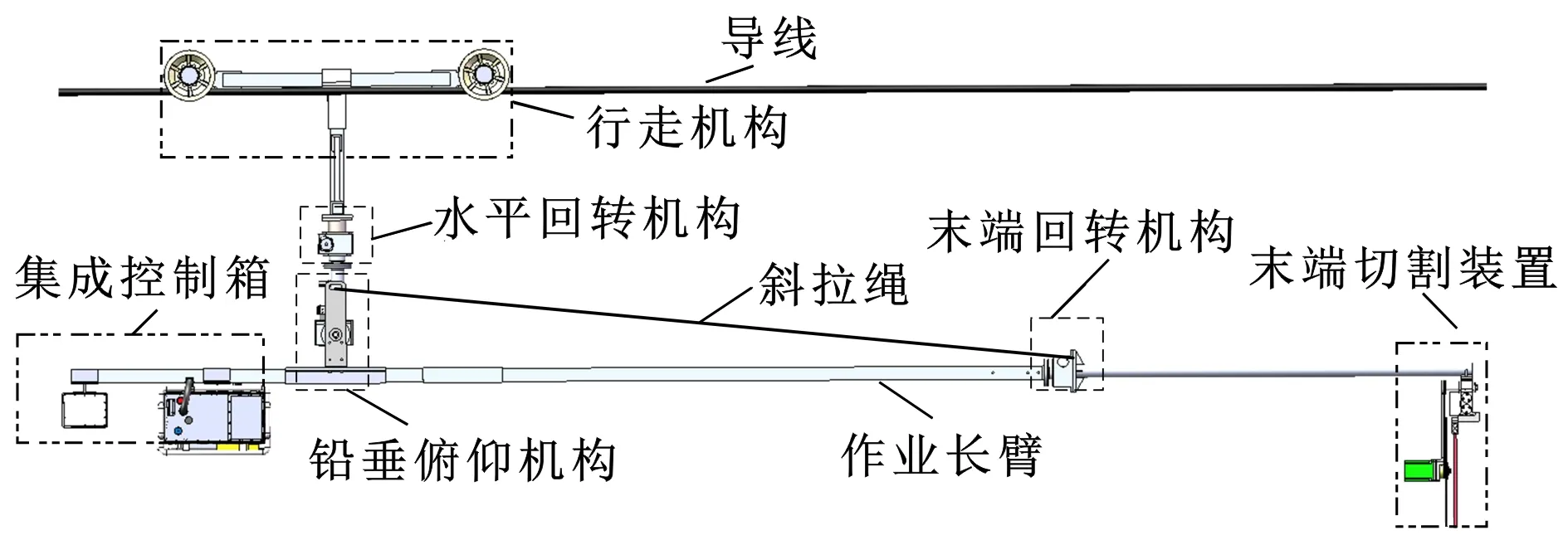
图4 树枝切割机器人虚拟样机
作业长臂共长5.5 m,包括方形臂和圆形臂两段,作业长臂为悬臂梁结构且末端负载较大,通过斜拉绳的方式来提高作业臂的刚性,有利于末端稳定作业。末端切割装置垂直布置在作业长臂作业端的最外侧,通过上端法兰与作业长臂连接,具体结构如图5所示,夹爪与锯片前后平行布置,锯片电机与曲柄连接可实现锯片的摆动切割。该装置箱体内设两套传动机构,夹爪电机通过齿轮传动将运动传递给正反牙丝杆,通过丝杆螺母的配合来实现夹爪的对称往复运动,夹爪夹持一端采用刃口形状,夹持时可嵌入树枝一定深度;曲柄电机同样通过齿轮传动来实现丝杆的转动,丝杆与曲柄齿条形成螺旋配合,进而将运动传递给曲柄齿轮,最后实现曲柄的来回摆动。
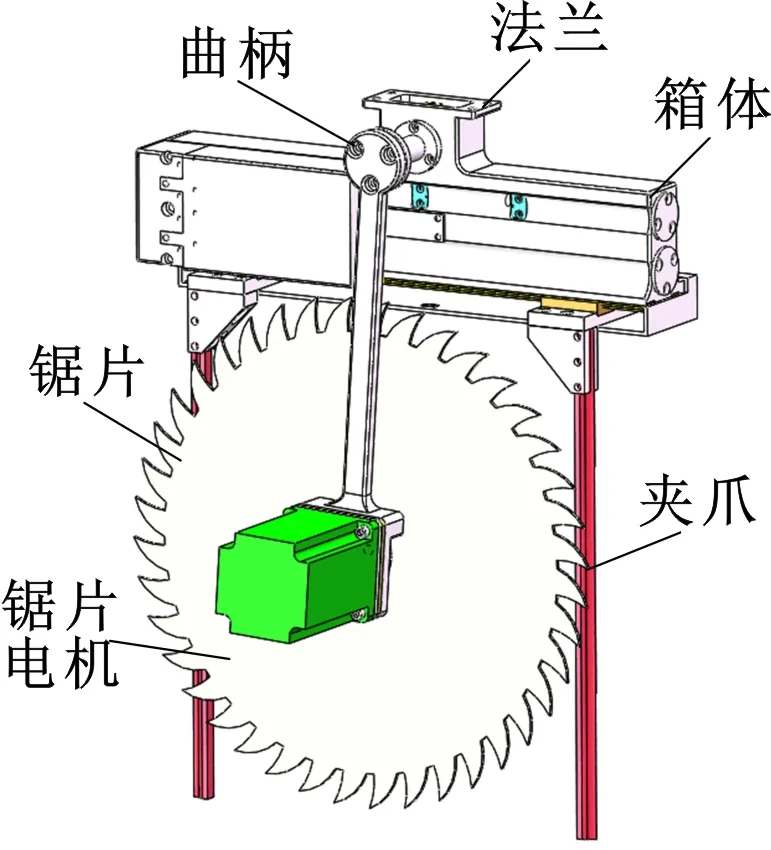
图5 末端切割装置结构
2.2 作业规划
树枝切割机器人在进行树枝修剪作业时可将所有工况分为两类:一类为修剪细小树枝区域,另一类为修剪粗树枝区域。修剪细小树枝区域时,采用扫切的方法,机器人沿导线行走至待修剪区域位置后通过铅垂俯仰机构调整作业末端至作业高度,之后控制水平回转机构实现360°水平扫切。若在某一位置树枝生长茂密,水平扫切未切割完全,此时再通过末端回转机构带动锯片实现回转扫切完成对该位置的切割。
修剪粗树枝区域时,采用夹持切割的方法。在此建立简化的树木模型作为演示,作业步骤如图6所示。首先控制机器人行走至作业位置,控制水平回转机构与铅垂俯仰机构粗略调整末端修剪装置与树枝之间的位姿,状态如图6(a)所示;控制夹爪打开,曲柄带动锯片逆时针回转90°让刀,控制末端回转机构细调夹爪与树枝位姿,状态如图6(b)所示;通过铅垂俯仰机构实现夹爪进刀,左右两夹爪夹紧树枝,状态如图6(c)所示;锯片电机开启,曲柄带动锯片顺时针回转90°完成对粗树枝的切割,状态如图6(d)所示。
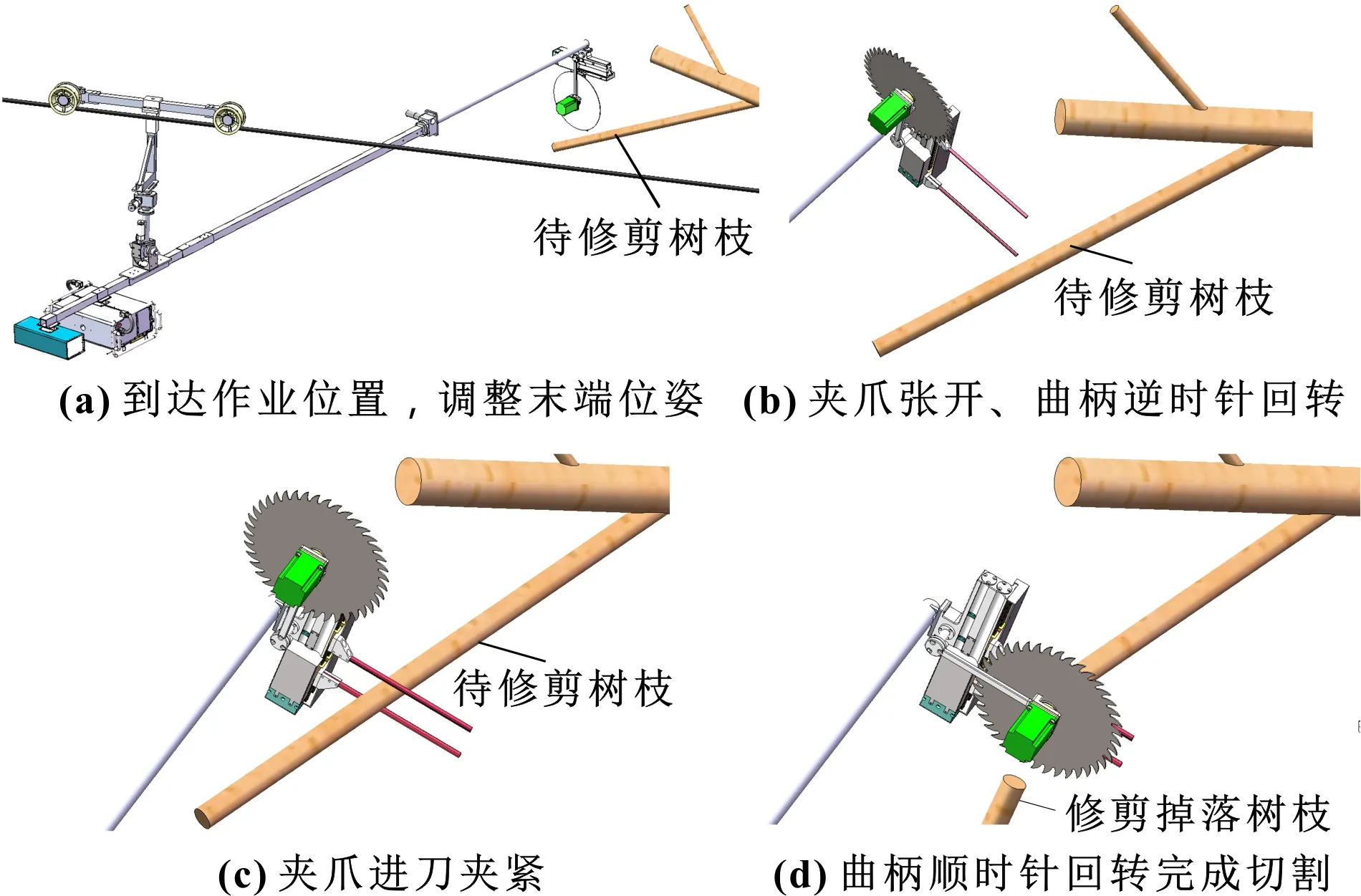
图6 夹持切割粗树枝步骤示意
3 机器人运动学分析
3.1 树枝切割机器人运动学建模
为验证所设计机器人的作业空间能否完全覆盖前文所述的理论修剪区域,将机器人视为由关节杆件串联的运动链,通过D-H参数法推导出作业末端的运动学方程,并利用蒙特卡洛法求解出末端作业空间。
影响树枝切割机器人末端锯片姿态的关节包括水平回转关节、铅垂俯仰关节和末端回转关节,按照D-H参数法依次建立坐标系{}-{},如图7所示。其中基座标系{}建立在移动机构横臂中央,{}建立在水平回转机构的几何中心,{}建立在铅垂俯仰机构回转件与作业长臂连接处,{}建立在作业长臂的最外侧处,{}建立在锯片的最下端点处。各关节参数的变化范围见表1。
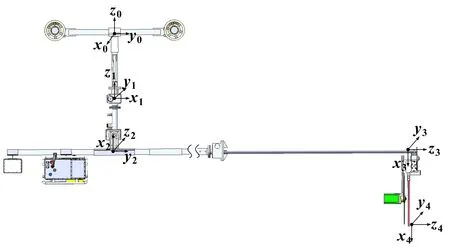
图7 树枝切割机器人连杆坐标系
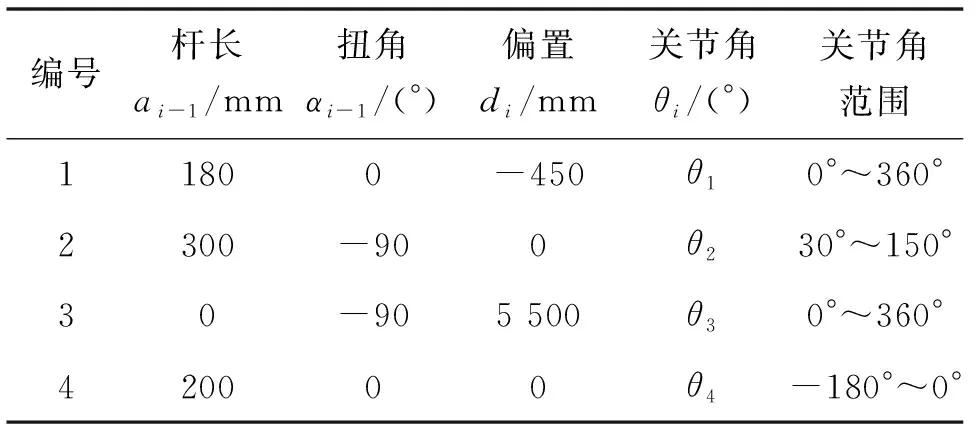
表1 机器人关节连杆参数及变化范围
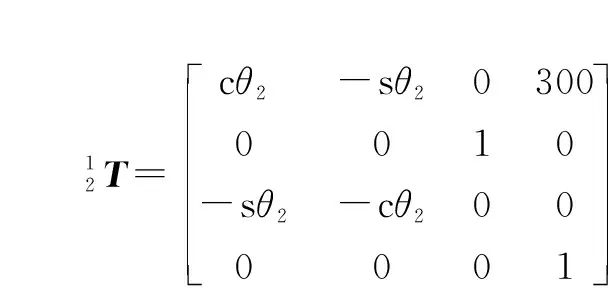
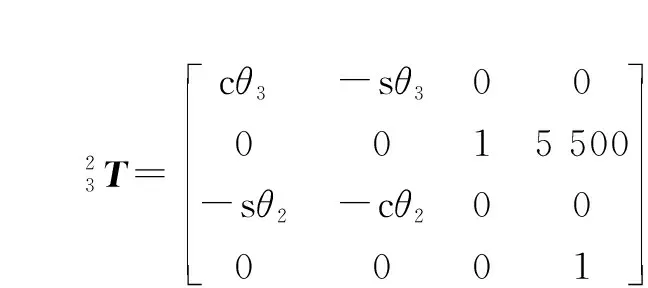
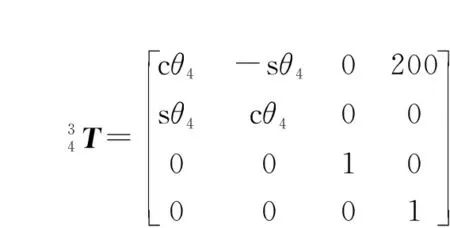
通过上述参数可求得具体的变换矩阵为
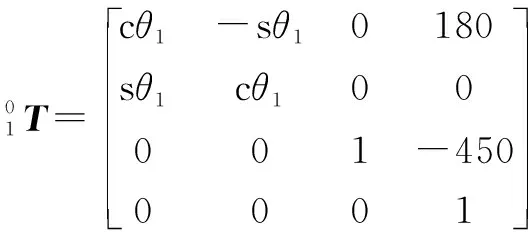
(2)
(3)
(4)
(5)
末端锯片在基座标系{}的姿态可抽象表示为
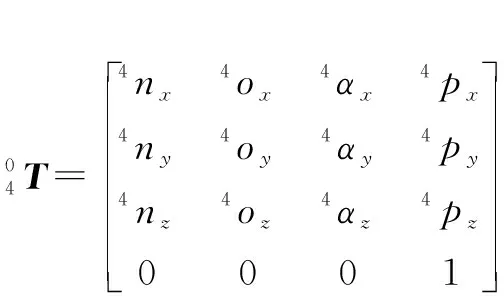
(6)
该矩阵可以表示机器人运动学正解,具体数值为上述式(2)(3)(4)(5)四个变换矩阵之积,锯片在空间中的位置姿态是关于、、、四个变量的函数,每给定一组变量的值就会得到锯片的一个位姿。
3.2 末端作业空间求解
为直观地得到末端作业空间,采用蒙特卡洛法在MATLAB中求解树枝切割机器人的工作空间,具体步骤为
(1)通过对上述4个关节变量在它们各自的变量范围内随机取值生成一组变量值的组合;
(2)将所取的变量值组合代入式(6)中得到锯片在空间里的一个点坐标;
(3)将步骤(1)和(2)重复次,在此取10 000,将所有的点坐标在MATLAB中绘制作业空间的点云图,如图8所示。

图8 末端作业空间点云图
由8图可知机器人作业末端在空间内会形成一个近似椭球体的作业空间,作业空间主要通过垂直于导线轴线的平面投影图来反映。在平面投影图中上下对称轴并不为直线=0,这是由于机器人作业端与基座标沿轴存在750 mm的高度差,因此该图形上下关于=-750 mm对称,同理该投影图左右关于=180 mm对称。
现以一条典型的110 kV线路来验证作业空间能否完全覆盖前文所述的待修剪理论模型区域。该线路的具体参数如表2所示。由于线路中央自然弧垂最大,则以线路挡段中央来进行分析计算,取风偏角为5°。通过计算可得线路中央的自然弧垂约为6.1 m,则在线路挡段中央,待修剪区域可表示为
表2 110 kV典型线路参数

(7)
机器人上线后导线的附加弧垂约为1.2 m,因此机器人的实际作业空间需将之前求解的结果沿轴负方向平移1.2 m,之后再将所求的理论修剪区域与其比较,比较结果如图9所示。很明显,作业空间能够完全覆盖待修剪的半椭圆形区域,验证了机器人结构设计的合理性。
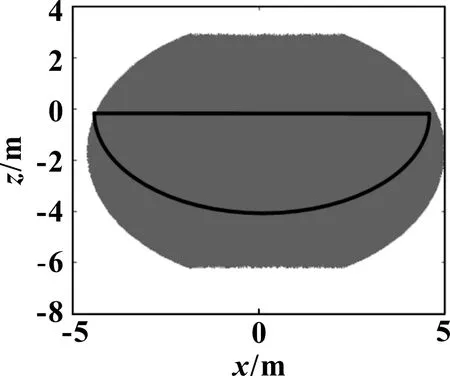
图9 作业空间与理论修剪区域比较
4 样机试验
按照文中所设计的虚拟样机研制了架空高压线路走廊树枝切割机器人试验样机,并在某大学自建模拟线路上进行了现场试验。具体方法是:在地面将机器人组装完成后,人工辅助机器人上线,同时准备一些不同粗细的树枝放在机器人行走线路的不同空间位置以模拟现场作业环境,通过底面基站发出指令操控树枝切割机器人完成修剪作业。机器人试验样机以及现场作业分别如图10和图11所示。

图10 树枝切割机器人试验样机
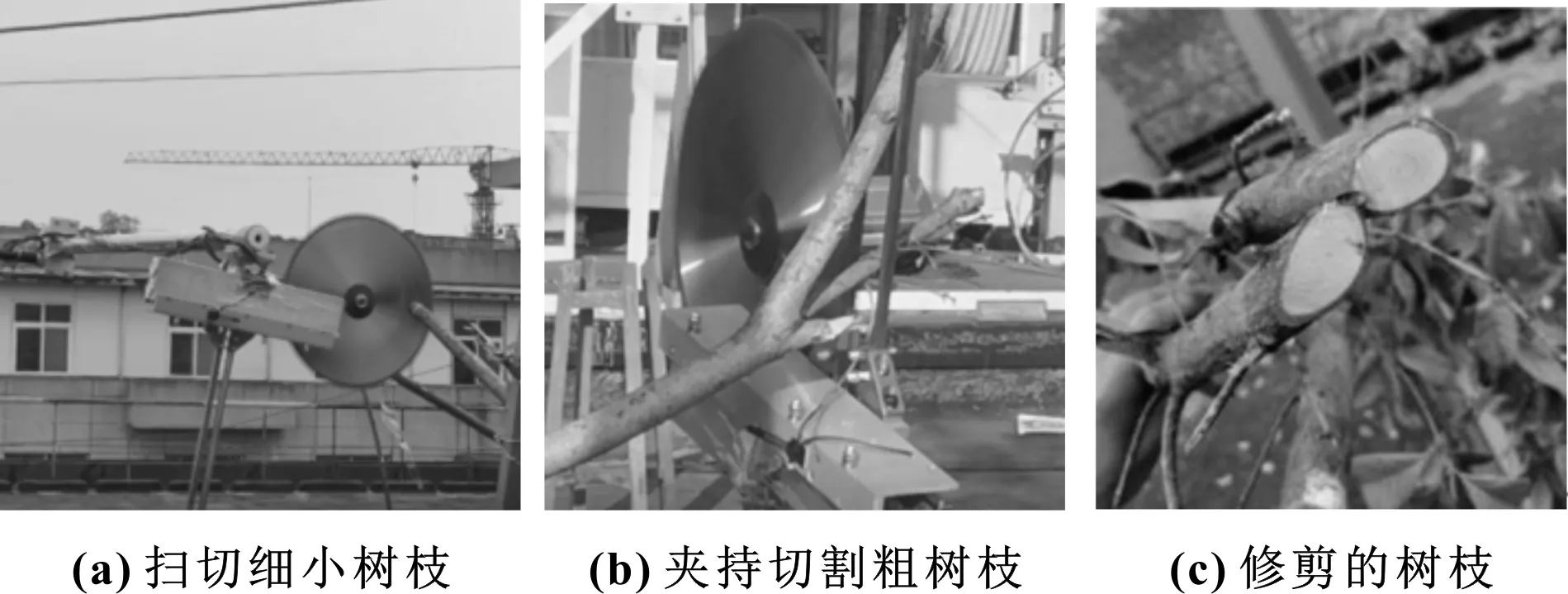
图11 树枝切割机器人修剪作业
结果表明:树枝切割机器人各关节运动性能良好,对模拟环境下的树枝修剪效果良好,对线路上各个方位的树枝修剪完全,能够满足前文所述作业空间的覆盖要求,切割的树枝最粗可达60 mm且切口平整,具有较强的实用功能。
5 结论
分析风对架空导线的影响,得到了架空线路走廊树枝的理论修剪区域,提出树枝切割机器人原理构型;以110 kV高压线路为例,依据机器人原理构型设计了虚拟样机模型,对其进了作业规划,之后建立了机器人运动学模型并求解了末端锯片的作业空间,验证了机器人结构设计的合理性;最后在自建线路上进行了样机试验,机器人样机关节运动性能良好,能有效地完成树枝修剪任务。
