舰舰协同制导舰空导弹中末目标交班问题研究
2022-09-17赵永涛焦纲领王军生李亚飞
赵永涛,焦纲领,王军生,李亚飞
(海军研究院,北京 100072)
为应对反舰导弹的饱和攻击,舰空导弹应具备超视距拦截来袭目标的作战能力. 超视距拦截是指发射舰在其舰载雷达的视距外拦截来袭的目标,需舰舰协同制导方式来完成,舰空导弹采用初中末复合制导体制[1-4]. 初制导段采用程序弹道、中制导段采用捷联惯导加指令修正制导方式、末段采用主动雷达寻的制导方式.
由中制导向末制导的过渡过程称为中末制导交班,包括中末制导目标交班和中末制导弹道交班两个方面,这里重点对中末制导目标交班问题进行研究. 目标交班的含义是指当由中制导转入寻的末制导时,交班设备(协同制导平台雷达)将目标的运动参数信息交给接班设备(弹上的主动雷达导引头),雷达导引头天线指向目标并预定多普勒频率,实现对目标的有效截获,包括距离截获、速度截获和角度截获,其中,角度截获是最难实现的[5-6].
有研究通过将单位视线矢量投影到弹体坐标系下,利用其三轴投影来解算导引头天线预定指向角,或者应用坐标转换矩阵对应元素相等的方法,得到了导引头天线预定指向角解算模型,但不适用于大预定指向角的情况[7-8]. 有研究进行了中末制导目标交班误差分析和目标截获概率计算,但误差分析未考虑协同制导作战流程的信息传递环节,也未对多次目标交班截获概率问题进行研究[9-14].
文中针对舰空导弹超视距拦截时中末制导目标交班的预定指向角解算、误差源分析、截获概率计算等问题,首先确定了中末制导目标成功交班需要满足的约束条件;通过规定一种新的导引头天线轴绕弹体坐标系的旋转顺序,提出了一种适用于大预定指向角情况的导引头天线预定指向角解算模型;应用方差分析方法,建立了导引头天线预定指向角的误差模型,并结合协同制导作战信息解算模型对误差源进行了分析;应用概率论和排列组合方法,建立了单次目标交班成功概率模型和多次目标交班成功概率模型.
1 协同制导流程与中末目标交班约束条件
1.1 舰舰协同制导流程
舰舰协同制导场景为:在某海域,我舰艇编队由舰艇A 和舰艇B 两艘舰艇组成,敌一枚反舰导弹(目标)袭击舰艇编队,在目标来袭方向上舰艇B 处于编队的前方.
舰舰协同制导流程为:目标低空高速向舰艇编队飞行,随着时间的推移,首先处于舰艇B 的视距内;舰艇B 发现跟踪目标,并通过编队数据链将火控级的目标信息传送给舰艇A;舰艇A 依据接收的目标数据完成舰空导弹的发射;在导弹飞行过程中,舰艇B 实时向舰艇A 传送目标信息;舰艇A 通过无线电收发设备将目标信息传送给导弹;导弹根据接收的目标信息和惯导装置测得的导弹状态,依据中制导律控制导弹拦截目标;弹目相对距离达到末制导雷达作用距离时,导引头开机,依据末制导律精确命中目标,实现对来袭目标的超视距拦截.
1.2 中末制导目标交班约束条件
中末制导目标交班约束条件就是导引头截获目标的条件,包括距离截获、速度截获和角度截获.
距离截获是指导弹与目标的相对距离R小于等于导弹雷达导引头的有效作用距离r,即R≤r.
速度截获是指保证使目标回波信号落入滤波器通带. 设导引头速度搜索波门宽度为±Δfs,多普勒频率预定误差为Δfd,要保证实现对目标的速度截获,则要求多普勒频率预定误差满足 |Δfdmax|<Δfs.
角度截获问题根源在于末制导导引头的视场是有限的,目标可能落在此视场之外而不能被截获. 为了保证截获,必须要求导引头头部跟踪天线的电轴指向对准所要截获的目标方向. 在中末制导目标交班时,预定回路预定天线的指向角,若导引头天线预定角误差为Δε,导引头天线波束宽度为Δφs,则要求导引头天线角预定的误差满足 |Δε|<Δφs/2.
其中,距离截获、速度截获条件较易满足,但角度截获要求准确预定导引头头部天线电轴方向,并保证预定角精度落入一定范围内,受目标信息测量误差和导弹本身信息误差的影响,角度截获条件较难实现. 对目标交班问题的研究主要包括导引头天线预定指向角解算及指向角误差分析的研究和导引头对目标截获概率的研究.
2 导引头预定指向角解算
2.1 坐标系建立与导引头预定指向角定义
分别建立地面坐标系OXdYdZd(简称d 系)、弹体坐标系MXbYbZb(简称b 系)和视线坐标系MXLYLZL(简称L 系),其定义和转换矩阵Cbd 与CLd见文献[5],这里不再赘述.
导弹在飞行过程中,要求导引头预定回路使导引头天线电轴指向目标方向,这样就要使导引头天线相对弹体转动某个角度. 因此,将导引头天线相对弹体转过两个角度去对准视线方向称为导引头天线的角预定,将转动的两个角叫做导引头天线预定指向角[5,7].
在弹体坐标系中,导引头天线预定指向角由导引头天线预定指向高低角εb和导引头天线预定指向方位角βb表示,εb与βb的定义见文献[5].
2.2 导引头预定指向角解算模型
文献[7]通过将单位视线矢量投影到弹体坐标系下,利用其三轴投影来解算导引头天线预定指向角. 令视线单位矢量在弹体坐标系的投影为(xbL,ybL,zbL),得到一种导引头天线预定指向角解算模型如式(1)和式(2)所示.
规定导引头天线轴转向视线轴的旋转顺序为:先绕MZb轴正向旋转εb角,再绕MYb轴正向旋转βb角,文献[5]给出了旋转关系图.
舰空导弹的位置参数以(xm,ym,zm)表示;目标的位置参数以(xt,yt,zt)表示. 令εLd表示视线高低角在地面系纵向的投影,其表示为

式(6)和式(7)即为所提出的引头天线预定指向角解算模型.
3 导引头预定指向角误差分析
3.1 导引头预定指向角误差模型
对式(6)和式(7)取全微分,可得导引头天线预定指向高低角εb和天线预定指向方位角βb的误差δεb和δβb为
式(8)~(13)即为导引头天线预定指向角的误差模型. 同理,也可以得到文献[7]的预定指向角误差模型.
3.2 导引头天线预定指向角误差因素分析
由导引头天线预定指向角误差模型可知,导引头天线预定指向角误差最主要的影响因素为导弹位置 信 息 误 差(δxm,δym,δzm)、目 标 位 置 信 息 误 差(δxt,δyt,δzt)、导弹姿态信息误差(δϑ,δψ)和预定回路指向误差(δβ1,δε1). 由文献[4,6]的舰舰协同制导作战流程分析和指令解算模型,导弹位置信息和目标位置信息由制导平台提供,导弹姿态信息由弹载惯性测量单元提供. 其中,导弹姿态误差和预定回路的指向误差较小,最大的误差源就是制导平台的位置测量误差. 这里仅对位置测量误差进行重点分析.
由文献[4,6]给出的制导指令信息解算模型,导弹M 的位置在平台A 地理坐标系下的投影为

同理,可得目标T 在制导平台B 雷达测量下的位置误差表达式.
3.3 仿真分析
仿真初始参数为:中末制导交班时,平台A 位于东经120°,南纬45°;目标T 位于东经120.75°,南纬45°,飞行高度为5 m;平台A 测得导弹斜距为40 km.取制导雷达测距系统误差为20 m,随机误差均方差为10 m;测角系统误差为0.1°,随机误差均方差为0.1°;导引头自身指向角系统误差为0.2°,随机误差均方差为0.1°;导弹姿态系统误差为0.2°,随机误差均方差为0.1°;目标T 的定位系统误差为200 m,定位随机误差均方差为100 m. 将文中的指向角及误差解算模型称为“方法1”,而将文献[7]的指向角及误差解算模型称为“方法2”.
当导弹俯仰角从-90°变化到90°时,导弹偏航角从-80°变化到80°时,仿真结果如图1~图4 所示.
图1 导引头预定方位角误差Fig. 1 Error of yaw frame pointing
图1 和图2 为采用“方法2”时的导引头天线预定指向角误差仿真结果,图3 和图4 为采用“方法1”时的导引头天线预定指向角误差仿真结果. 可见,采用“方法1”时的导引头天线预定指向角误差一直都小于采用“方法2”时的误差,并且采用“方法2”在时,导引头预定方位角误差还出现了突变问题. 图1至图4 的仿真结果充分验证了所提出的导引头预定指向角解算模型的正确性以及其在减小预定指向角误差方面的有效性.
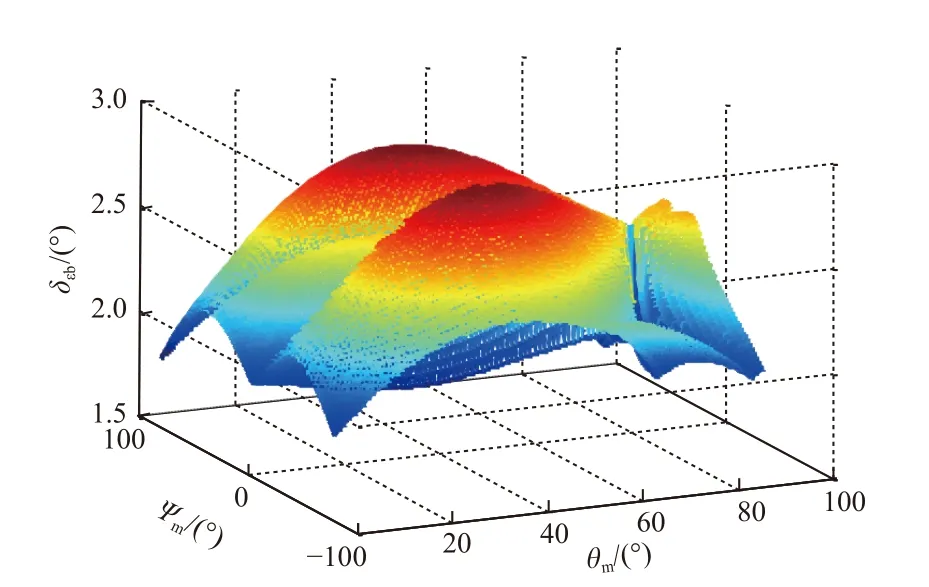
图2 导引头预定高低角误差Fig. 2 Error of pitch frame pointing
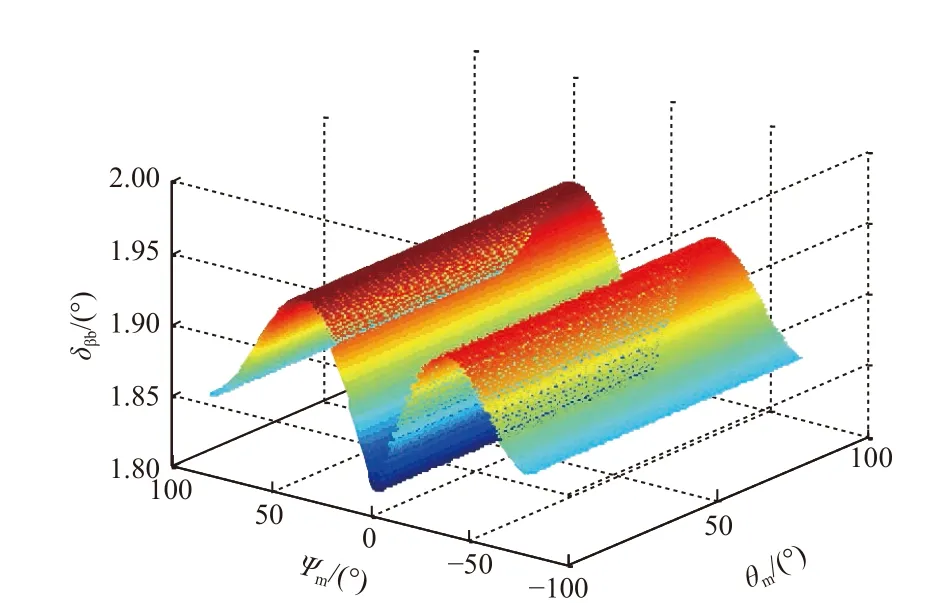
图3 导引头预定方位角误差Fig. 3 Error of yaw frame pointing
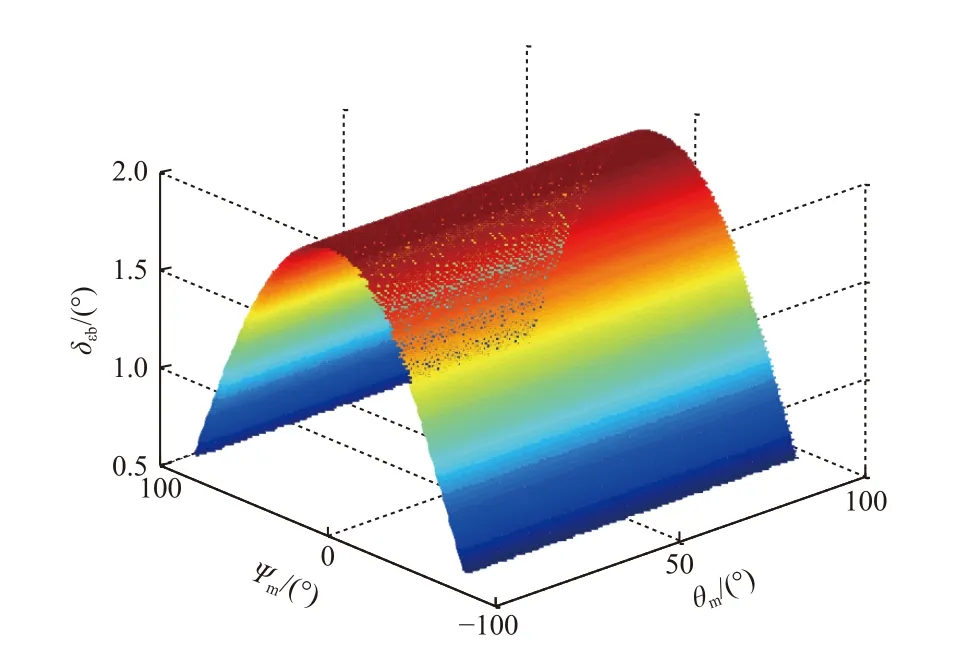
图4 导引头预定高低角误差Fig. 4 Error of pitch frame pointing
4 目标交接班成功概率计算
4.1 单次目标交接班成功概率
由1.2 节的分析,导引头成功交班包括三个部分:即距离截获、速度截获和角度截获,所以,目标交接班成功概率也称为目标截获概率. 导引头截获目标的概率P可以表示为

式中:Pr、Pα、Pv分别为距离截获、角度截获和速度截获概率.
导弹的速度截获概率Pv为

式中:Pfd为目标回波多普勒频率落入接收机多普勒滤波器频带内的概率;Pd为在回波落入滤波器的条件下导引头接收机正确检测到目标的概率.
目标落入导引头雷达滤波器组内的概率Pfd服从瑞利分布,即
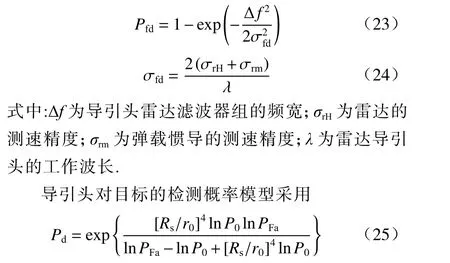
式中:Rs为弹目距离;r0为导引头最大探测范围;P0为约束检测概率;PFa为虚警概率.
距离截获概率是指导弹在中制导末期导引头雷达开机时目标与导弹之间的距离处于雷达距离波门内的概率. 在弹载设备正常工作的情况下,通常认为Pr≈1.
假设导引头天线预定指向角误差服从正态分布,在概率论中,误差正态分布曲线下的全部面积相当于全部误差出现的概率[15],即

式中:μ对应于导引头预定指向角的系统误差;σ对应于导引头预定指向角随机误差均方差.
导引头预定高低角误差落入导引头半波束宽度内的概率和预定方位角误差落入导引头半波束宽度内的概率分别用Pαε和Pαβ表示,则中末制导目标交班时总的目标截获概率为

式(23)~(29)即为单次目标交接班成功概率的解算公式.
假设目标交接班时,导引头速度截获概率和距离截获概率为1,仿真比较不同导引头预定指向角解算方法对目标截获概率的影响. 仿真条件同3.3 节,并分别设定导引头半波束宽度为1.5°和3°. 设定导弹偏航角为0°,当导弹俯仰角从-90°变化到90°时,仿真结果如图5 和图6 所示.
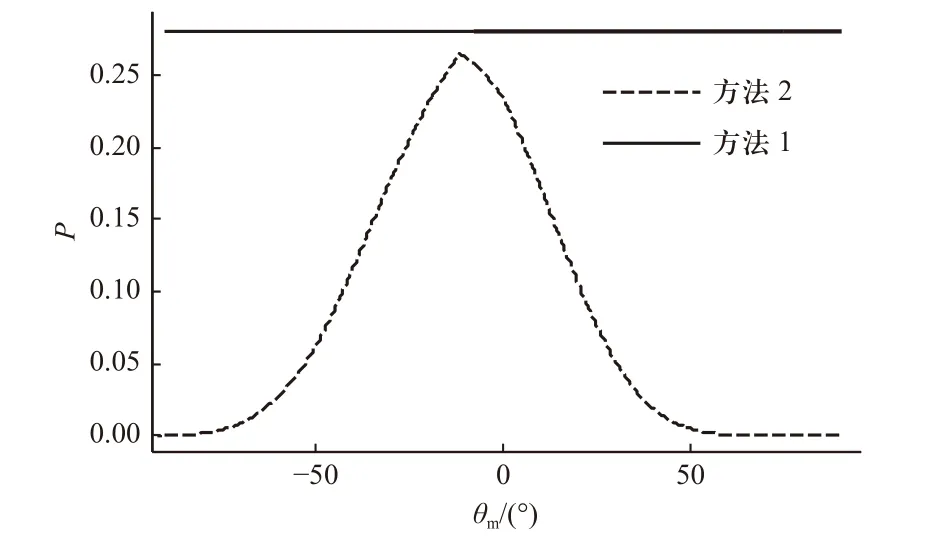
图5 单次目标截获概率(φs=1.5°)Fig. 5 The target capture probability one time (φs=1.5°)
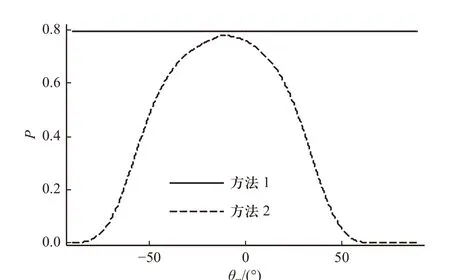
图6 单次目标截获概率(φs=3°)Fig. 6 The target capture probability one time (φs=3°)
由图5 和图6 可见,目标交接班成功概率随着导引头波束宽度的增加而变大;在同一导引头波束宽度情况下,采用“方法1”时的目标交接班成功概率要高于采用“方法2”时的目标交接班成功概率,并且采用“方法2”时的目标交接班成功概率随着预定指向角的变大而明显降低.
设定导弹俯仰角为0°,当导弹偏航角从-80°变化到80°时,仿真结果如图7 和图8 所示.
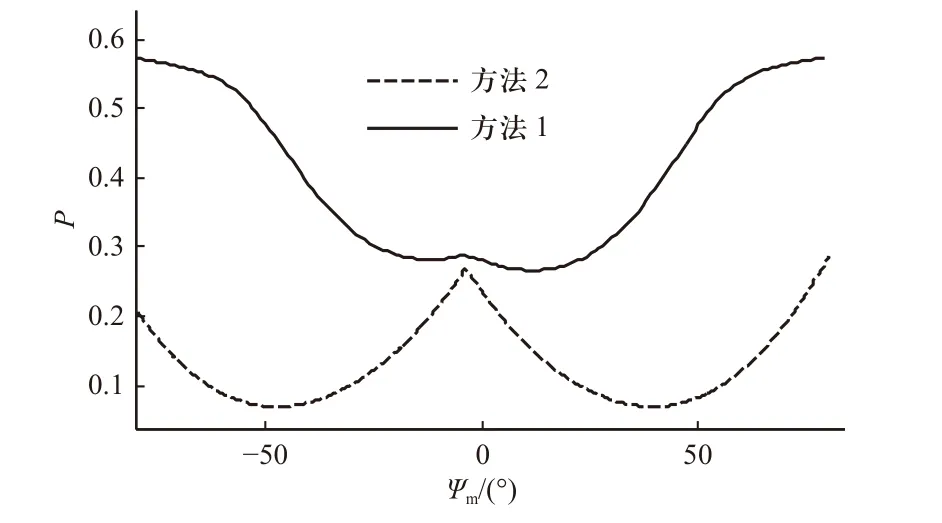
图7 单次目标截获概率(φs=1.5°)Fig. 7 The target capture probability one time (φs=1.5°)

图8 单次目标截获概率(φs=3°)Fig. 8 The target capture probability one time (φs=3°)
由图7 和图8 可见,目标交接班成功概率随着导引头波束宽度的增加而变大;在同一导引头波束宽度情况下,采用“方法1”时的目标交接班成功概率要明显高于采用“方法2”时的目标交接班成功概率.
当导弹俯仰角从-90°变化到90°、导弹偏航角从-80°变化到80°时,仿真结果如图9~图12 所示.
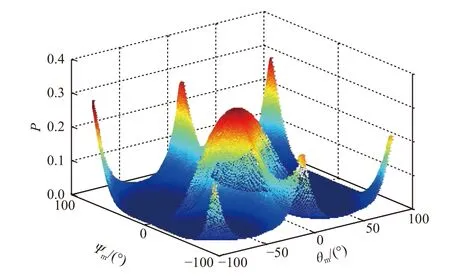
图9 单次目标截获概率(φs=1.5°)Fig. 9 The target capture probability one time (φs=1.5°)
图9 和图10 为采用“方法2”时的目标交接班成功概率仿真结果,图11 和图12 为采用“方法1”时的目标交接班成功概率仿真结果. 由图9~图12 的仿真结果可见,采用“方法1”时的目标交接班成功概率要明显高于采用“方法2”时的目标交接班成功概率. 综上,图5~图12 的仿真结果充分验证了所提出的导引头预定指向角解算模型在提高中末制导目标交班成功概率方面的有效性.
图10 单次目标截获概率(φs=3°)Fig. 10 The target capture probability one time

图11 单次目标截获概率(φs=1.5°)Fig. 11 The target capture probability one time
图12 单次目标截获概率(φs=3°)Fig. 12 The target capture probability one time
4.2 多次目标交接班成功概率
若单次目标截获概率不能满足要求,可采用多次目标交班的方式. 下面研究给出多次目标截获概率解算模型.
若每次目标截获概率都为P1,则在N次目标指示中,至少有k(k≤N)次目标成功截获概率为
式(30)~式(32)即为多次目标截获概率解算模型.
设定单次目标截获概率和目标交班次数,对多次目标截获概率进行仿真,仿真结果见表1 和表2 所示.
表1 P1=0.6 时多次目标截获概率表Tab. 1 The target capture probability when P1=0.6

表2 P1=0.8 时多次目标截获概率表Tab. 2 The target capture probability when P1=0.8
由表1 和表2 仿真结果可见,多次目标截获概率与单次目标截获概率、判定准则和交班次数有重要的关系. 在中末制导目标交班时,当单次目标成功截获概率一定时,可以结合导引头跟踪目标的判定准则,通过适当增加交班次数的方法来提高目标交班成功概率.
5 结束语
针对舰空导弹超视距拦截目标时的中末目标交班角度截获问题,给出了导引头天线方位和高低预定指向角解算及误差模型,建立了单次目标交班成功概率模型和多次目标交班成功概率模型. 所提出的导引头天线预定指向角的解算模型和误差及概率分析方法,可为协同制导各制导平台误差源的精度确定、导引头天线预定回路设计、复合制导律的设计、交班策略优化等关键问题研究提供坚实的技术支撑.
