噪声干扰下基于二维特征图和深度残差收缩网络的齿轮箱故障诊断
2022-09-17李晓峰向辉杨青桦
李晓峰,向辉,杨青桦
(1.重庆工商职业学院智能制造与汽车学院,重庆 401520;2.重庆青山工业有限责任公司,重庆 402761)
0 前言
齿轮箱是一种被广泛应用的机械装置,在航空航天装备、交通运输工具以及风力发电装备等领域发挥了关键作用。然而由于其服役的工作环境恶劣且复杂,长时间的负荷运转常常导致齿轮箱发生故障,严重时甚至会导致机器停机,造成巨大的经济损失。因此,及时分析收集到的齿轮箱振动信号可以判断齿轮箱是否发生异常,以便能及时发现问题,有效避免故障的持续恶化。
学者们提出了许多传统技术来进行时域、频域和时频域的旋转机械振动信号分析,基于振动信号的故障诊断方法较多且研究相对成熟。刘佳音等采用基于奇异值分解降噪方法结合功率谱图实现了齿轮故障诊断。崔慧娟等将集合局部均值分解降噪特征向量与离散隐马尔科夫模型结合,实现了风机齿轮箱故障诊断。金成功采用自适应白噪声平均总体经验模态分解滤除信号内的噪声干扰,并结合能量熵和马氏距离实现了齿轮故障诊断。虽然信号分析方法在机械故障诊断方面取得了较好成就,但需要专家知识筛选特征来实现故障诊断,过程繁琐。
深度学习(DL)方法已经在机械故障诊断中发挥出优良性能。徐活耀和陈里里利用提取的时域和时频域特征构建高维特征向量,输入堆栈稀疏自编码器训练,最终实现了滚动轴承故障诊断。叶壮和余建波将经验模态分解得到的多个内禀模态函数组成灰度图输入到多通道加权卷积神经网络,实现了齿轮箱故障诊断。HAO等将多传感器轴承故障振动信号输入一维卷积长短时记忆网络。XIA等针对旋转机械故障开发了一种基于多传感器信息输入卷积神经网络 (Convolutional Neural Network,CNN) 的融合技术。张明德等基于多尺度卷积策略的卷积神经网络,实现了滚动轴承故障诊断。WEN等提出基于一维振动信号转换成二维图像的LeNet-5新CNN故障诊断方法。宫文峰等将一维信号构造成二维拓扑结构,输入改进CNN中诊断滚动轴承故障。这些模型在旋转机械的故障诊断方面取得了较好效果,但均没有考虑噪声干扰的情况,难以保证精度。
本文作者提出一种噪声干扰下基于二维特征图和多尺度深度残差收缩网络(Two-dimensional Feature Map and Deep Residual Shrinkage Network,TM-DRSN) 的齿轮箱故障诊断方法,将原始一维信号转换为二维特征图集作为输入层,采用TM-DRSN在二维尺度对特征图进行自动故障特征提取和识别,并利用标准数据集对TM-MSDRSN方法进行分析验证。
1 基于TM-DRSN的故障诊断方法
1.1 基于一维深度卷积神经网络的故障诊断方法
LetNet、AlexNet、GoogleNet等经典卷积神经网络(CNN)模型因其独特的卷积结构、权值共享、稀疏链接等特点被广泛用于图像识别领域。CNN对特征有强大的学习能力和较高的泛化能力,近几年有学者提出将CNN应用在故障诊断领域。与传统的完全连接的深度神经网络相比,CNN大大减少了可训练参数 (权重和偏差) 的数量,并且大多具有很高的计算复杂性。针对机械设备的故障诊断所采集到的振动信号,不同故障类型的特征在信号中所占的比重与位置不同,且伴随着噪声等因素,造成原始信号具有多尺度复杂性,影响故障诊断准确率。在使用卷积层与池化层交替连接构建的一维深度卷积神经网络模型 (1D-DCNN) 提取故障特征时,通常添加批量归一化 (Batch Normalization,BN)、修正线性单元 (Rectified Linear Unit,ReLU)、Dropout等技巧使得模型的泛化能力与诊断准确率提高。1D-DCNN结构如图1所示。
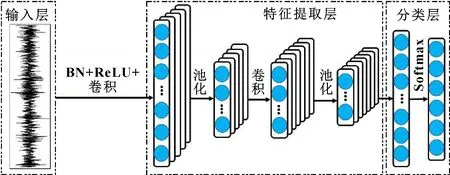
图1 一维深度卷积神经网络结构示意
当振动信号中重要的细节故障特征大小有很大差别且伴有噪声干扰时,选择合适的卷积核来提取噪声环境下不同大小的特征难度较大,最终会导致机械设备的故障诊断效果不佳。
1.2 基于一维深度残差收缩网络的故障诊断方法
针对CNN现有浅层智能诊断算法的不足,ZHAO等基于深度残差网络(Deep Residual Network,DResNet)和挤压激励网络结构(Squeeze-and-Excitation Network,SENet),提出了深度残差收缩网络(Deep Residual Shrinkage Network,DRSN)。1D-DRSN中采用全局平均池化 (Global Average Pooling,GAP) 提高模型的运算速度,结构如图2所示。
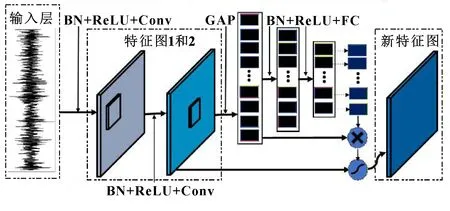
图2 一维残差收缩模块结构
DRSN的本质是将SENet中各个特征通道的加权替换成各个特征通道的软阈值化,即:
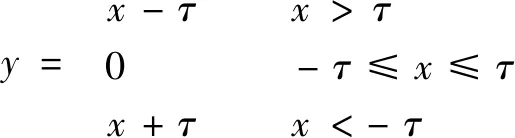
(1)
式中:为输入特征;为输出特征;为阈值,即正参数。软阈值化能更加灵活地设置特征取值区间,最终得到更优的模型。1D-DRSN将原始信号直接作为输入,针对含噪声或复杂数据旋转机械振动信号的学习效果较佳,可为诊断领域提供参考。
1.3 基于二维特征图和深度残差收缩网络(TM-DRSN)的故障诊断方法
DRSN融合了DResNet、SENet及软阈值的优点,构建出的深度神经网络模型可以自适应地去除噪声,避免了过度依赖于专家经验的信号处理等繁琐过程。为得到便于DRSN输入的二维特征图,同时保留一维振动信号的关联性和时序性,首先将振动信号按横向插样构建为二维特征图,以包含1024点的振动信号为例,数据点为时间序列,振动信号1024点按顺序依次插入32行32列的二维矩阵中,进而得到满足模型输入的二维特征图。本文作者提出一种针对噪声环境下齿轮箱振动信号的TM-DRSN方法,实现了故障诊断。图3所示为基于二维特征图的深度残差收缩网络模型结构图。TM-DRSN主要通过多个残差收缩模块提取故障特征,输入层为二维特征图。该方法采用二维卷积核实现故障特征的自动提取, DRSN的第一特征提取层为宽卷积核层,残差收缩模块选用小卷积核提取特征。为增强模型的抗噪声干扰能力,引入融合了Sigmoid 和ReLU 的 ELU 激活函数。在TM-DRSN模型训练中,采用ADAM自适应学习率算法优化参数,采用交叉熵损失函数Softmax作为分类器实现故障诊断。
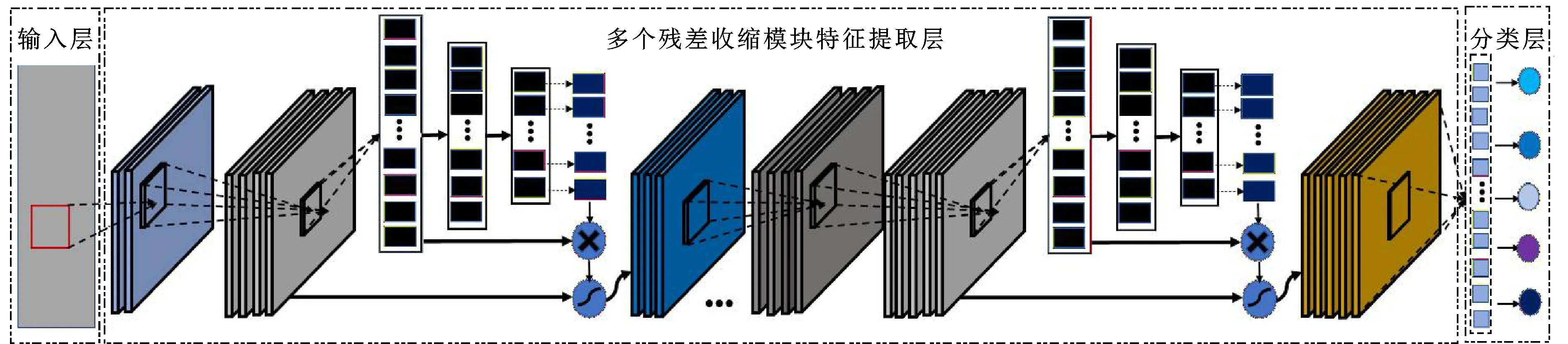
图3 基于二维特征图的深度残差收缩网络模型结构
2 基于TM-DRSN的齿轮箱故障诊断结果
2.1 TM-DRSN模型结构设计和参数设置
本文作者所提的TM-DRSN模型共有13层模型,包括1个输入层 (样本数据输入维度为32×64)、1个卷积层、8个残差收缩模块 (包含2个卷积层和1个软阈值模块)、1个Dropout层、1个GAP层、1个Softmax层。在Windows10计算机中基于Python-Tensorflow搭建深度残差收缩网络模型。模型训练时设置mini-batch为50,学习率为0.001,循环迭代轮数为3 000,Dropout率为0.5。TM-DRSN模型的具体结构参数设置如表1所示。
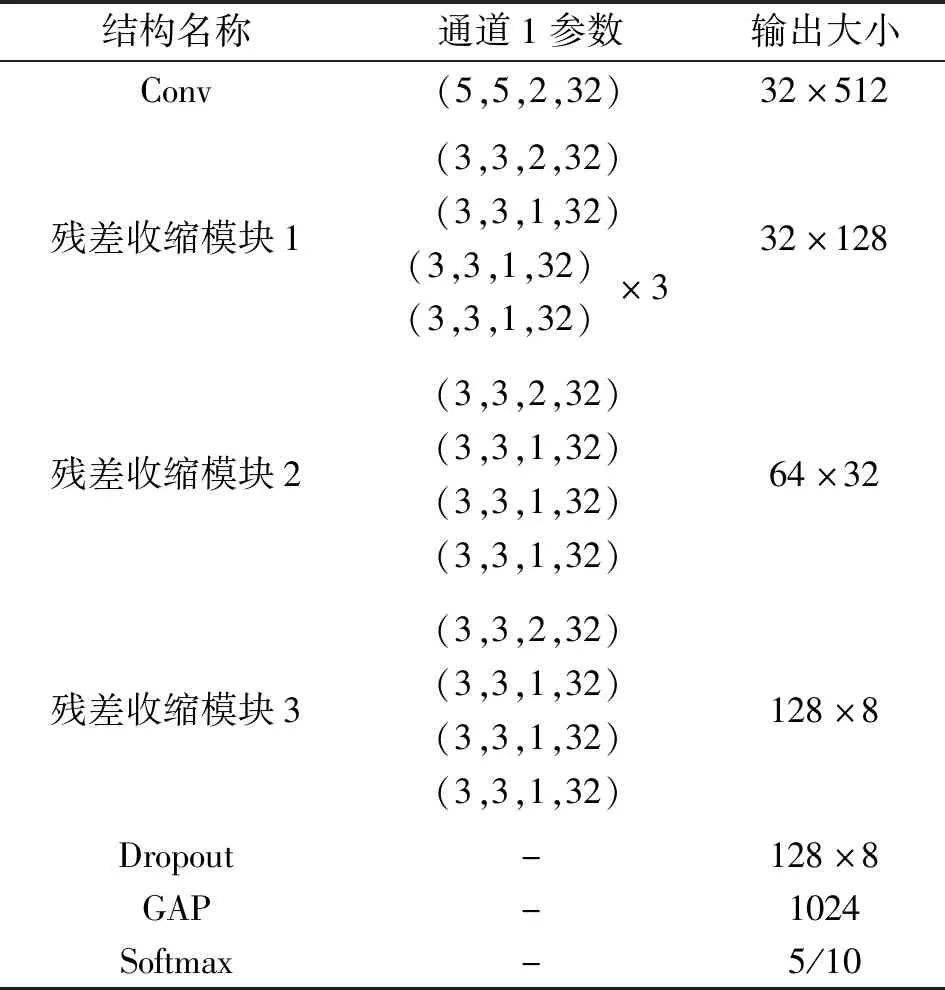
表1 TM-DRSN模型的参数设置

2.2 试验系统和数据集制作
试验数据来自Spectra Quest振动试验系统。在试验中,研究了在两种不同转速和负载配置运行条件下齿轮和轴承的故障,设置为20 Hz-0 V和30 Hz-2 V。8个通道分别采集电动机的振动和扭矩、行星齿轮箱和减速齿轮箱的在、、三轴上的振动。本文作者选取了行星齿轮箱在30 Hz-2 V工况下轴的振动数据,5种故障类型分别为健康、齿根裂纹、表面磨损、缺齿和断齿。文中在获得信号数据集时采用重叠采样方法,即将一维振动信号切分为每类故障1 000个样本,每个样本包含2 048个数据点,得到的数据集G30-2包含5 000个样本。试验中选取80%样本作为训练集,20%作为测试集。
2.3 基于TM-DRSN的故障诊断方法验证
2.3.1 TM-DRSN的高级特征可视化
为分析TM-DRSN对原始特征的学习能力,将原始特征与高级特征用T-随机邻近嵌入 (T-SNE)算法进行二维可视化,结果如图4所示。
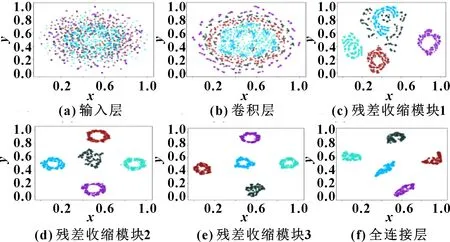
图4 测试样本的特征分布
由图4可知:原始特征的散点图显示的5种故障类型相互之间均有交叉,无法识别其具体故障类型;随着TM-DRSN模型层数增加,每一层故障特征可分割性逐渐增强,说明深度网络结构的必要性,最后经过Softamx层实现故障有效分类。
2.3.2 TM-DRSN模型的有效性验证
为证明TM-DRSN模型的优势,在无噪声环境下进行试验。使用文献[18]和[19]中的方法、1D-DCNN、1D-DResNet、1D-DRSN和TM-DRSN分析相同的数据集,并比较故障诊断结果。1D-DResNet和1D-DRSN的结构与TM-DRSN相同,参考表1,不同的是前两者的第一卷积层均采用1×88大卷积核提取故障特征,步长设置为1×8,残差块和残差收缩模块中卷积核大小均为1×4。1D-DCNN的结构参数见表2,不同方法的诊断结果见表3。
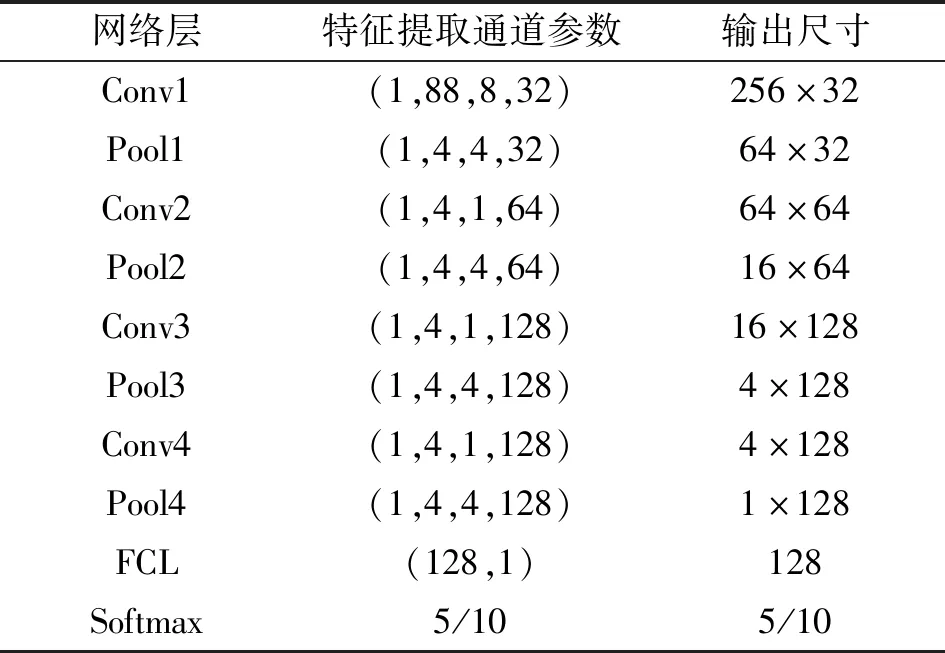
表2 文中提出的CNN模型参数
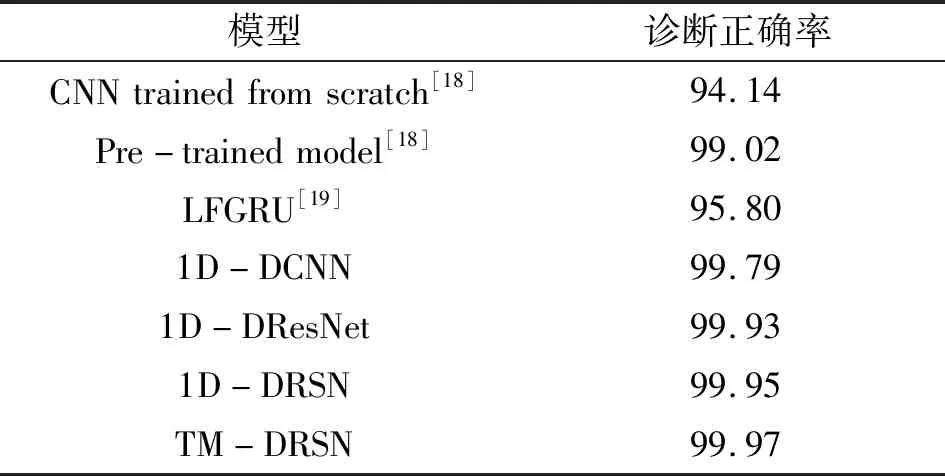
表3 不同模型的诊断正确率 单位:%
由表3可以看出:当采用G30-2数据集进行试验时,文献[18]和[19]中方法的正确率分别为94.14%、99.02%和95.80%,其他方法1D-DCNN、1D-DResNet和1D-DRSN的诊断正确率分别为99.79%、99.93%和99.95%,而本文作者所提TM-DRSN方法的诊断正确率为99.97%,接近100%。相较之下,文中方法得到的故障诊断率更高,表现出更好的故障诊断能力,验证了TM-DRSN方法的有效性。
2.3.3 MSDRSN模型的抗噪声能力验证
在测试样本中加入SNR为0~10 dB的高斯白噪声模拟强噪声干扰环境,结果如表4所示。
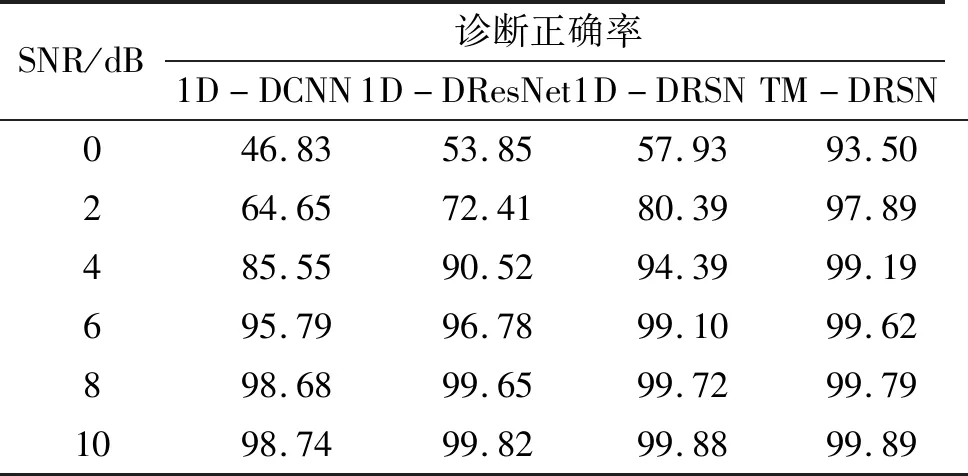
表4 不同模型的诊断正确率 单位:%
由表4可知:当采用4种方法对G30-2数据集进行抗噪声能力试验时,不同模型表现出的诊断能力有较大不同。当采用1D-DCNN模型进行训练和测试时,在SNR=0环境下的诊断正确率仅为46.83%,1D-DResNet和1D-DRSN的诊断正确率稍有提升,分别为53.85%和57.93%。主要原因为1D-DCNN模型网络层数较浅,不能很好地提取到高级故障特征;而1D-DResNet在其基础上添加了残差块,加深了特征提取层数;1D-DRSN在1D-DResNet的基础上引入软阈值化模块,从而对含噪声或复杂数据的齿轮箱振动信号学习效果更佳,可得到更高的诊断正确率。TM-DRSN模型在1D-DRSN的基础上作进一步改进,基于横向插样法将一维数据样本构建成便于DRSN输入的二维特征图,并且在TM-DRSN输入层构建宽卷积核层作为第一特征提取层。采用TM-DRSN在二维尺度对特征图进行自动故障特征提取,得到的故障诊断正确率为93.50%。随着SNR增加,4种方法的故障诊断正确率提升,并且在SNR的增长区间内,正确率从小到大始终为1D-DRSN、1D-DResNet、1D-DRSN、TM-DRSN。当SNR=10 dB时,TM-DRSN的诊断正确率最高,为99.89%,结果表明了TM-DRSN方法的有效性和优越性,且在噪声干扰下具有极高的故障诊断能力。
3 结论
(1)本文作者提出了一种噪声干扰下基于二维特征图和深度残差收缩网络的齿轮箱故障诊断方法。该方法基于横向插样法将一维数据构建成二维特征图作为DRSN的输入层,将多个残差收缩模块引入深度卷积神经网络中作为特征提取层,得到的TM-DRSN方法可以自动提取原始信号的高阶特征,实现了真正意义上的智能化诊断。
(2)利用齿轮箱标准数据集进行试验验证,与1D-DCNN、1D-DResNet、1D-DRSN以及其他3种现有方法相比,TM-DRSN方法可以取得更高的诊断正确率,表明了该智能诊断方法的有效性。利用G30-2数据集在噪声环境下进行测试试验,当SNR=0时,TM-DRSN方法的诊断正确率为93.50%,SNR=10 dB时的诊断正确率为99.89%,与其他深度学习诊断方法相比,其诊断效果有较大提升,验证了TM-DRSN方法具有较强的抗噪声干扰能力。
