下肢外骨骼康复机器人刚柔耦合分析与仿真
2022-09-17李金良张斌舒翰儒薛明远刘阿健
李金良,张斌,舒翰儒,薛明远,刘阿健
(山东科技大学机械电子工程学院,山东青岛 266590)
0 前言
下肢外骨骼机器人是一种能够穿戴在人体下肢、辅助人体运动的机械装置。在军事领域,下肢外骨骼能使士兵拥有更强大的肢体力量,帮助他们提升负载能力,极大地增强单兵战斗力。如加州大学伯克利分校的KAZEROONI博士团队在2004年研制的BLEEX被装备到阿富汗驻军。在医疗领域,下肢外骨骼可以辅助运动能力下降的老年人行走,帮助患者进行康复训练,让下肢有运动障碍的残疾人重新获得自如行走的运动能力,如日本筑波大学研制的HAL和以色列研发的Rewalk被用来帮助下肢瘫痪、脊髓损伤的患者重新获得一定行走能力。下肢外骨骼康复机器人的组成连杆和转动关节都具有一定程度的柔性,在辅助人体运动的时候会发生弹性变形,这严重影响到整个运动轨迹的位置精度和控制的实时性与准确性。王斌锐等为研究影响机械臂末端变形的因素,将机械臂杆件和关节柔性考虑在内,建立了刚柔耦合动力学模型。刘娜通过建立煤矿焊接机器人的刚柔耦合模型,分析了弹性形变等因素对焊枪动态误差的影响。针对机械臂刚柔耦合的情况,VOLECH等在机器人的减速器和连杆存在柔性时以仿真方式获得了机器人末端的变形量。谭月胜等通过建立串联机械臂的刚柔耦合模型,得到了末端位置运动误差并提出基于BP网络的伪目标点法对末端位置误差进行补偿。陈宵燕等建立了一种包含几何与柔性误差的串联机器人刚柔耦合位置误差模型,并提出了相应的精度提高策略。侯小雨建立了将串联机器人关节和连杆柔性考虑在内的动力学模型,研究了影响末端定位精度的因素。
本文作者针对所设计的下肢外骨骼康复机器人,利用步态仿真验证了其结构的正确性,并通过HyperMesh和ANSYS对小腿连杆进行柔化处理,联合ADAMS建立其刚性大腿连杆-中心刚体-柔性小腿连杆刚柔耦合系统,对正常人体步态下的动态响应进行研究,通过对比刚柔耦合和刚体模型在摆动期内的仿真数据,得到其运动变形误差在误差允许范围内,验证了其刚柔耦合模型的正确性与合理性,并为其后续的结构优化和控制系统的设计提供了理论依据。
1 刚柔耦合动力学建模
1.1 机械结构设计
所设计的下肢外骨骼康复机器人主要包括腰部部件、大腿连杆、小腿连杆、足部装置、髋关节、膝关节和踝关节七部分,整机材料为7075铝合金,且所有关节均采用主动驱动。我国成年人普遍身高在1 500~1 900 mm之间,本文作者以《中国成年人人体尺寸》作为下肢外骨骼康复机器人的构件尺寸参考依据。为保障不同人群的使用,在腰部部件、大腿连杆和小腿连杆处设置尺寸调节装置进行部件的尺寸调节。为方便后续的分析,以身高180 cm、质量75 kg的成年人为例对机器人进行尺寸约束,并构建出三维模型如图1所示。
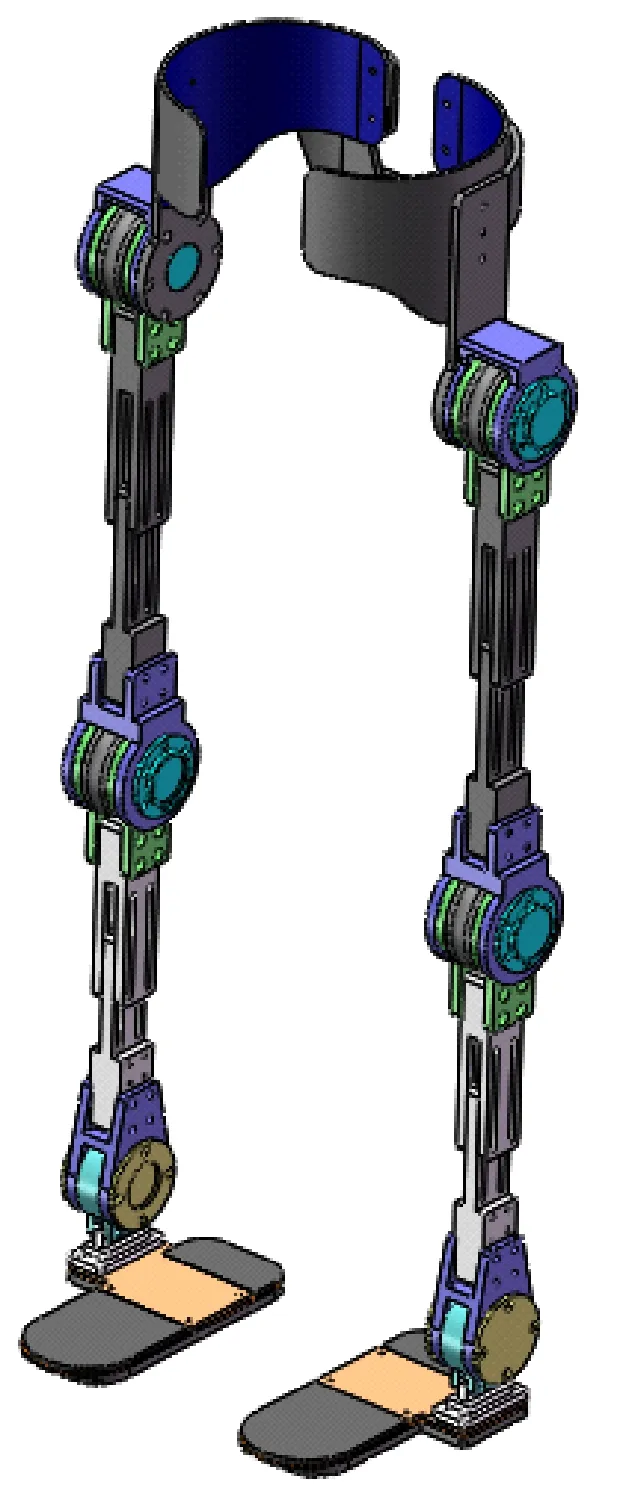
图1 下肢外骨骼康复机器人三维模型
1.2 刚柔耦合动力学建模
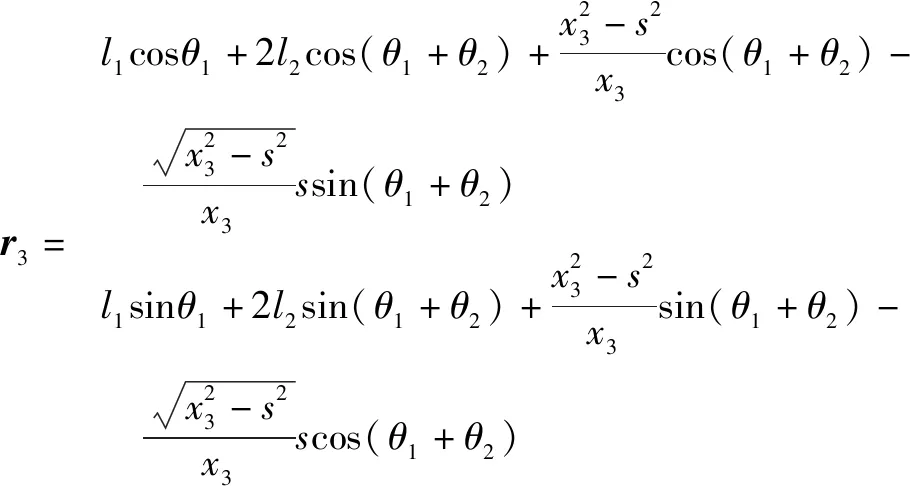
下肢外骨骼康复机器人的步态与人体步态相同,具有双侧肢体支撑期、单侧肢体支撑期和摆动期3个时期,本文作者仅对摆动期内的动力学进行分析。在辅助人体运动进入摆动期时,小腿连杆对其末端位置精度的影响远大于大腿连杆,故将小腿连杆等效于Euler-Bernoulli梁模型并利用混合坐标系法和假设模态法来描述小腿连杆的弹性变形。2005年,LEE提出一种非延长的弯曲模型,对单杆柔性梁进行描述,与传统的方法相比,能精确描述柔性梁的弯曲机制。本文作者将采用该模型来描述柔性小腿连杆的弯曲机制,并且将整机简化为刚性大腿连杆-中心刚体-柔性小腿连杆模型进行分析,如图2所示。

图2 刚性大腿连杆-中心刚体-柔性小腿连杆动力学模型
图中,-坐标系表示惯性坐标系,-坐标系表示固定在中心刚体上的局域坐标系,其中原点是连接中心刚体与柔性小腿连杆的固定点。刚性大腿连杆长,其质量为,在力矩的作用下的旋转角度为;中心刚体长度为2,其质量为;柔性小腿连杆长度为,线密度为,刚度为。位置向量、、分别表示指向刚性大腿连杆重心、中心刚体重心和柔性小腿连杆沿着轴任一位置的微小单元;、分别表示绕刚性大腿连杆和柔性中心刚体重心旋转的转动惯量;柔性小腿连杆在任一位置处的柔性位移表示为。
在描述柔性小腿连杆变形时,、、在惯性坐标系的表述分别为

(1)

(2)
(3)
通过假设模态法将连续的柔性位移离散成有限序列完成动能方程中柔性位移的推导。(,)本质是时间与位置联系的变量,通过模态形函数()和模态坐标()的乘积并且求和来获取,其中代表着模态阶数,为特征值,文中采用前二阶模态。
(4)
()=cosh-cos-[sinh()-sin()]
(5)

(6)
机器人的总动能表示为


(7)
机器人的总势能表示为

(8)
其中:“˙”与“′”分别表示相对于时间和位置的微分算子。


(9)
将式(7)(8)代入式(9)可得到的值,Lagrange方程表达式为

(10)
将式(9)化简可得动力学方程为

(11)
式中:为广义模态坐标;为对应的广义力矩阵;为质量矩阵;为阻尼矩阵;为刚度矩阵。
2 刚体模型的建立及步态仿真
2.1 刚体模型的建立
在三维实体建模中,ADAMS在这一方面表现稍显不足,因此利用专业的CAD软件进行建模。首先通过SolidWorks完成下肢外骨骼康复机器人主要运动部件的实体三维建模并更改为*.x_t格式进行数据转换后导入ADAMS中,之后对导入的模型进行结构简化和质量、材料和颜色等相关属性的重新定义,最后在髋、膝和踝3个关节处分别添加转动副并对整机添加轴负方向重力加速度。
此时需要利用ADAMS中tools/model verify命令对所建立的模型进行检查,并得到反馈模型相关信息的对话框。最后设置适当的步长和仿真时间,检验模型在自身重力作用下所建立的模型是否正确,得到下肢外骨骼康复机器人的刚体模型。
2.2 步态数据的获取
目前人体行走时的步态数据主要有两种获取方法:一种是通过使用人类临床步态数据(CGA);另一种是对人体正常行走的实时动作进行捕捉得到行走时的步态数据。尚昆等人搭建了一套能对人在行走过程中的步态数据进行捕捉的人体步态数据获取系统;张淑珍等通过人体肌肉骨骼系统分析软件OpenSim获得了人体下肢各关节步态数据。本文作者通过OpenSim获得相关步态运动数据,如图3所示。
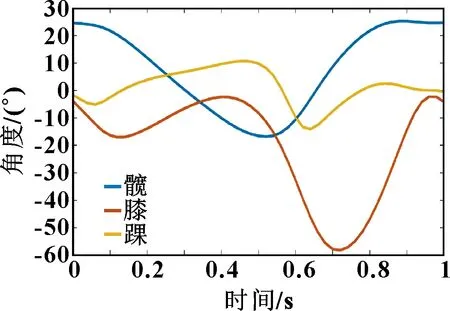
图3 人体步态数据
2.3 步态仿真结果分析
在ADAMS中构建出地面,然后设置脚与地面接触力和库仑摩擦力,并通过AKISPL样条曲线函数将人体步态数据定义在膝、髋、踝关节驱动上,时间设定为1 s,仿真步数设定为1 000,所得到的结果如图4所示。
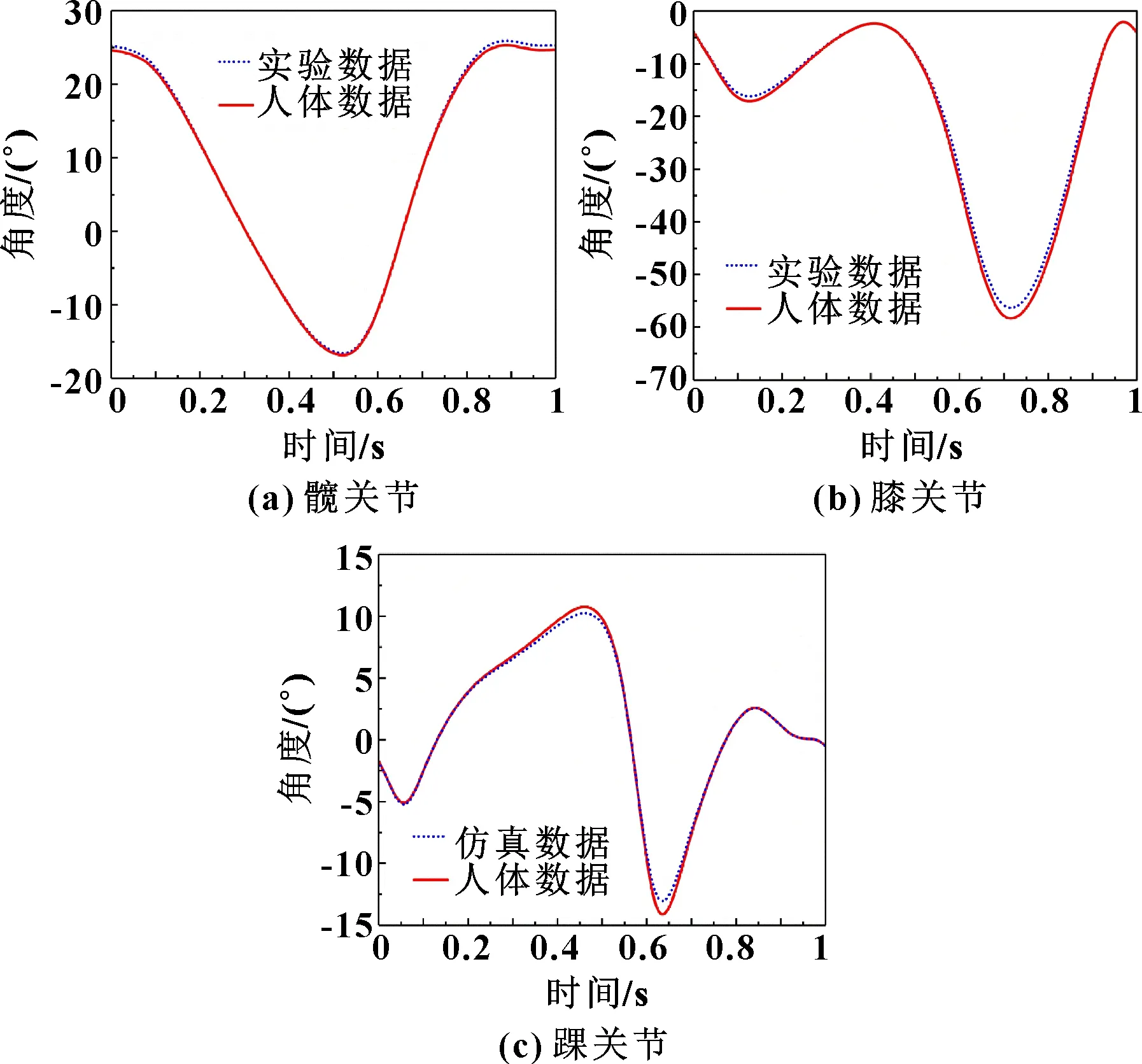
图4 右侧肢体步态仿真曲线(顺序依
从图4可以看出:所设计的下肢外骨骼康复机器人在平地上稳定行走时,各转动关节的转动曲线与正常人行走时的关节转动曲线基本保持一致,验证了其结构的正确性与合理性,为进一步的动力学仿真分析奠定了基础。
3 刚柔耦合动力学仿真分析
为了进行下肢外骨骼康复机器人刚柔耦合系统的联合仿真,首先利用HyperMesh和ANSYS完成小腿连杆的柔性化处理,生成其模态中性文件,然后导入ADAMS刚体模型中替换相对应的小腿连杆,最后通过仿真可分别获得刚柔耦合和刚体模型在摆动期内足部部件参考点的位置仿真数据。联合仿真流程如图5所示。

图5 联合仿真流程
3.1 小腿连杆柔性体的获取
目前主要有3种方法可以获取小腿连杆的柔性体:(1)通过离散柔性连接件建立小腿连杆的柔性体,但是会产生很大的误差;(2)通过使用ADAMS自带的Flex模块完成小腿连杆柔性体的建立,但仅适用于简单模型;(3)利用有限元软件完成小腿连杆的柔性化处理,然后生成小腿连杆的*.mnf模态中性文件并导入ADAMS中。考虑到所设计的下肢外骨骼康复机器人具有较为复杂的结构,所以采用最后一种方法完成其柔性小腿连杆的建立,通过HyperMesh对模型划分网格,确保网格质量并导入ANSYS内生成*.mnf模态中性文件,然后导入ADAMS中完成柔性小腿连杆的建立。具体步骤如下:
(1)在SolidWorks中小腿连杆另存为Parasolid文件后导入HyperMesh中设置材料属性并完成结构化网格的划分。图6所示为小腿杆件的结构化网格。
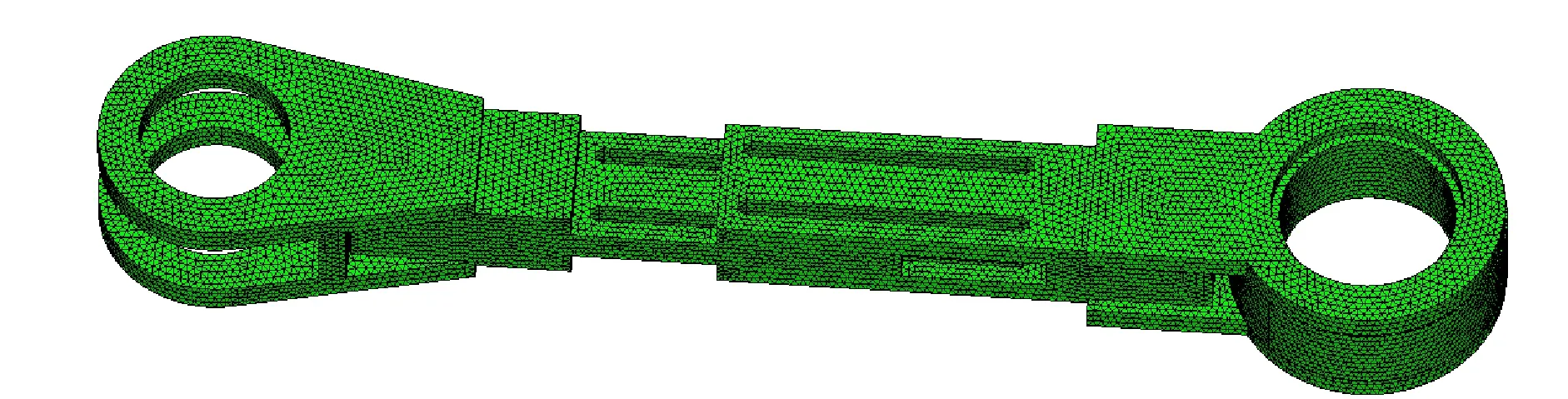
图6 小腿杆件结构化网格
(2)在小腿连杆上的两个关节中心处生成一个微小的质量单元,单元类型设置为mass21,单元属性设置为mass21p,并与关节内表面的节点组建成刚性区域,然后导出*.cdb文件。
(3)启动ANSYS的APDL模块,读取导出的*.cdb文件,利用命令流自动生成*.mnf文件。
3.2 小腿连杆柔性体替换
由于所设计的机器人具有左右结构对称且运动轨迹相同的特征,所以本文作者仅以右侧机构为仿真对象。通过ADAMS读取生成的*.mnf文件并替换刚体模型中相对应的小腿连杆,所替换的柔性小腿连杆在刚体模型中位置装配关系不变,刚体小腿连杆上的约束关系、所受载荷和关节驱动等都会转嫁到柔性小腿连杆上,如表1所示。
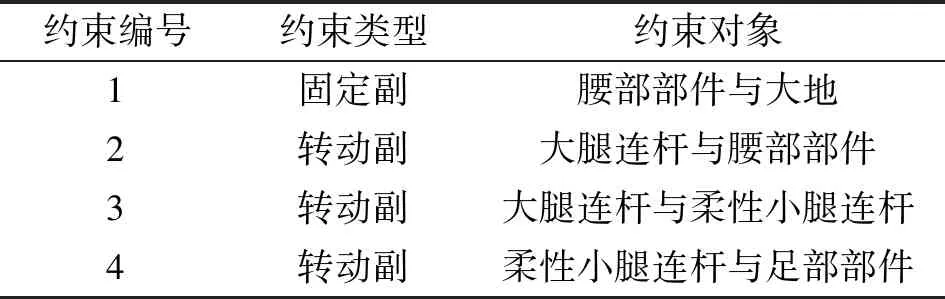
表1 替换小腿连杆后的约束关系
3.3 ADAMS动力学仿真分析
在ADAMS中将固定副设置在所建的刚体模型的腰部部件,并将人体步态数据定义在下肢外骨骼康复机器人关节处进行仿真。在ADAMS后处理中查看测量点与参考点之间的位移、速度和角速度的变化曲线,同时也可以获得柔性体指定点的应力值。通过分析比较刚体模型和虚拟样机模型在按人体步态数据行走时的动态响应,分析柔性小腿连杆对动态性能的影响,如图7所示。
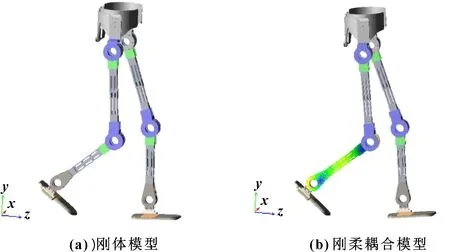
图7 下肢外骨骼康复机器人的仿真模型
下肢外骨骼康复机器人刚体模型末端测量点的行走路线是各关节严格按照所定义角度变化曲线所耦合出的路线。因为小腿连杆的柔性特性,刚柔耦合模型末端测量点的行走路线与刚体模型的行走路线相比出现了明显的位置偏差,主要体现在-平面内,严重影响了其辅助人体运动时的精度。如图8、图9、图10所示,分别是足部测量点在轴方向、轴方向位移曲线和整体位移曲线。

图8 刚体模型和刚柔 耦合模型在Y轴 方向位移曲线

图9 刚体模型和刚柔 图10 刚体模型和刚柔
从图8可以看出:在0~0.15 s的仿真过程中,轴正方向有小幅度的变形,最大可达到3.6 mm;在0.15~0.4 s的仿真过程中,轴负方向有大幅度的变形,最大可达到38 mm。从图9可以看出:轴方向上的变形幅度小,在0~0.14 s内的仿真过程中发生轴正方向变形,最大可达3 mm,在0.14~0.4 s内的仿真过程中发生轴负方向变形,最大可达到7.5 mm。从图10可以看出:刚柔耦合模型的整体位移偏差较小,在0~0.23 s的仿真过程中发生负向变形,最大可达到6 mm,在0.23~0.4 s仿真过程中发生正向变形,最大可达到14.5 mm。从3组位移的对比中可以看出刚柔耦合模型运动过程中在轴方向上变形最大。
4 结论
(1)设计一种下肢外骨骼康复机器人,利用OpenSim与ADAMS完成其步态联合仿真分析,验证了其结构的合理性与正确性,为下一步动力学研究奠定了基础。
(2)针对所设计的机器人,将小腿连杆的柔性考虑在内建立其刚柔耦合动力学理论模型。通过HyperMesh和ANSYS对小腿连杆进行柔性化处理,联合ADAMS对正常人体步态下的动态响应做了研究,获得机器人刚柔耦合模型在摆动期内足部测量点的位移变化曲线。通过刚柔耦合和刚体模型在摆动期内仿真数据的对比,发现在轴方向、轴方向位移误差和整体位移误差分别在-38~3.6 mm、-7.5~3 mm、-6~14.5 mm内波动,与其他两方面相比,轴方向上的位移误差最大,在误差允许的范围内,验证了下肢外骨骼康复机器人刚柔耦合理论模型的正确性与合理性,为后续的结构优化和控制系统的设计提供了参考。
