基于液压传动的新型太阳能聚光照明跟踪系统设计
2022-09-17张洗玉宁铎
张洗玉,宁铎
(1.广西科技师范学院数学与计算机科学学院,广西来宾 546199;2.陕西科技大学电气与信息工程学院,陕西西安 710021)
0 前言
随着能源危机的不断加剧,各国对可再生能源太阳能的开发利用日益重视。但是由于太阳方位固有的时变性、能量密度小等问题,严重制约了其推广应用。通过聚光方式提高太阳能密度是一项基础研究,太阳能聚光应用领域一般都需要利用高精度双轴全自动跟踪系统来提高太阳能利用率且其跟踪角误差必须小于0.2°。同时需要特别关注聚光区域太阳光线的均匀分布性,避免由于聚光区域受热不均所引起的不良后果。相比于太阳能光伏发电、光热发电模式,太阳光聚光照明对系统的跟踪精度和跟踪鲁棒性能有更严格的要求。
目前国际主流的太阳光跟踪方法有视日运动轨迹跟踪法、光电跟踪法、视日光电切换跟踪法、图像信息追踪法。考虑到太阳能聚光照明应用场合的环境复杂性以及系统自保护性与可靠性要求,在高精度全自动跟踪方案中选取光电跟踪法。针对上述现状,提出一种基于液压传动的新型双轴二级粗细调定位太阳聚光照明全自动跟踪系统,同时利用多传感器数据融合来增加系统在恶劣天气时的跟踪稳定性和抗干扰性。
1 太阳能聚光照明跟踪系统工作机制
1.1 系统总体结构
基于液压传动的太阳能聚光照明跟踪系统主要包括菲涅尔透射式点聚光透镜聚光模块、双轴粗细调阳光自跟踪模块、液压式跟踪机械云台、多传感器自保护模块、光伏电池板、LED灯具,其总体框图如图1所示,其中,阳光传感器、聚光设备、太阳能电池板均安装在云台面板上。

图1 系统总体框图
主控制器STM32F103ZET6获取温湿度传感器、风速传感器、风向传感器、限位传感器等多传感器所测量的外界实时环境信息,利用多传感器数据融合增加系统在外界天气恶劣时的跟踪稳定性和抗干扰性。当外界环境符合系统工作要求时,先根据阳光方位传感器光电式跟踪粗略搜索太阳光方位,在确定太阳大致位置后,STM32控制液压式跟踪机械云台,自动精准寻找阳光并使得跟踪角度小于0.1°,保证太阳光垂直照射机械平台的采光板,有效控制菲涅尔透镜像点弥散斑现象且使其汇聚阳光具有高效性、实时性。其中,菲涅尔透镜、光伏电池板、二级定位阳光跟踪传感器均位于同一机械云台,通过直径为100 mm的菲涅尔透镜将阳光汇聚成2 mm高亮光斑,利用塑料光导纤维将光斑导入特定区域照明,当处于夜晚、阴天、雨天或外界阳光强度较弱时(基于时钟芯片判断白天和夜晚,根据阳光方位传感器确定外界阳光实时强度),利用机械云台上的光伏电池板驱动终端LED照明灯具实现互补性照明。
1.2 系统机械结构
太阳能聚光照明跟踪系统要适应野外或室外长时间复杂的工作环境,且在外界特殊恶劣天气下能可靠稳定运行,故需要在结构抗风力、抗振动的方面加大设计力度及增加防雨、防尘模块,同时追踪云台需具有自保护功能,其机械结构如图2所示。该跟踪系统执行机构选择大地平面作为基准坐标系,以太阳高度角和方位角为目标,运行时间以时钟芯片设定为准。建立驱动力矩足够大、驱动转动角度范围较广的二维双轴太阳光追踪体系。在东西方向(与地面垂直)转动的轴是水平轴,U形支架上南北方向转动的轴是垂直轴,水平轴和垂直轴相垂直,太阳能聚光照明跟踪系统能在东西、南北不同方向上调整其角度,从而保证菲涅尔透镜聚光模块最大面积、最大角度采光。
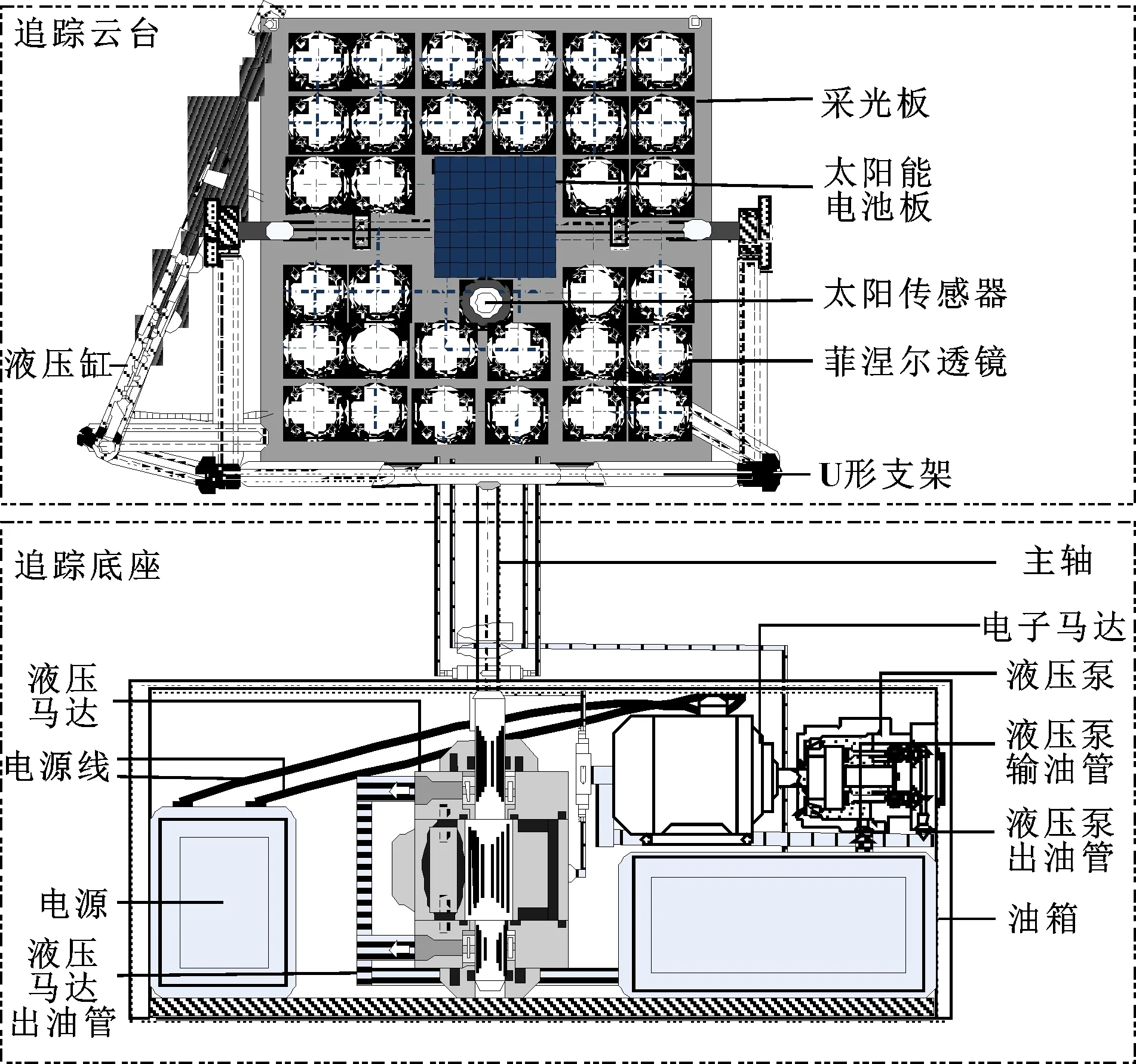
图2 太阳能聚光照明跟踪系统机械结构
主控核心STM32驱动由液压缸和液压电子马达所组成的液压传动系统进行阳光方位追踪,其中系统中液压站通过电磁阀控制供油方向,分别向液压缸、液压马达输送液压油。固定在追踪底座上的油箱的电子马达带动液压泵抽取油箱中的液压油进行加压,加压后的液压油经过电磁阀后进行分压:一部分输送到液压马达处,通过冲击叶片带动摆动轴转动,使液压能转化为机械能,而转动的摆动轴带动主轴转动,进而带动追踪云台水平维度平稳、匀速地水平(360°)转动,液压油通过液压马达出油管回到油箱;另一部分液压油再次通过电磁阀进行分压,分压后的液压油通过输油管输送到对称分布在主轴两边的液压缸,带动液压缸同时上升或下降,使追踪云台上采光板在垂直维度上进行上下(180°)翻转,再通过液压缸的出油管将液压油输送回油箱,控制液压缸的伸缩。此外,可以通过控制节流阀来控制液压油输送到液压马达或液压缸处,实现电气与液压传动自动化控制的有机结合。
1.3 光纤照明结构设计
光纤式照明模块主要由聚甲基丙烯酸甲酯材料PMMA塑料光纤与光导纤维末端散射器组成,其结构如图3所示。当外界应用场合的太阳光线垂直照射云台采光板上的菲涅尔透镜时,透镜把太阳光线汇聚于光纤受口器中心圆孔处,同时把塑料光纤接入上述圆孔。光导纤维末端散射器通过光纤连接于追踪云台采光板背面底部位置。菲涅尔透射式点聚光透镜聚光模块接收光线时,使用2个可调节杆来调整追踪云台采光板和云台底部之间的距离,达到有效改变菲涅尔透镜光斑大小的目的。同时,为确保该光斑精准位于光纤受口器中心位置,可以在水平、垂直方向上移动光纤受口器中心圆孔。最终,将聚光后的太阳光线有效导入光纤,并以全反射将光线传到特定区域实现绿色、自然照明。
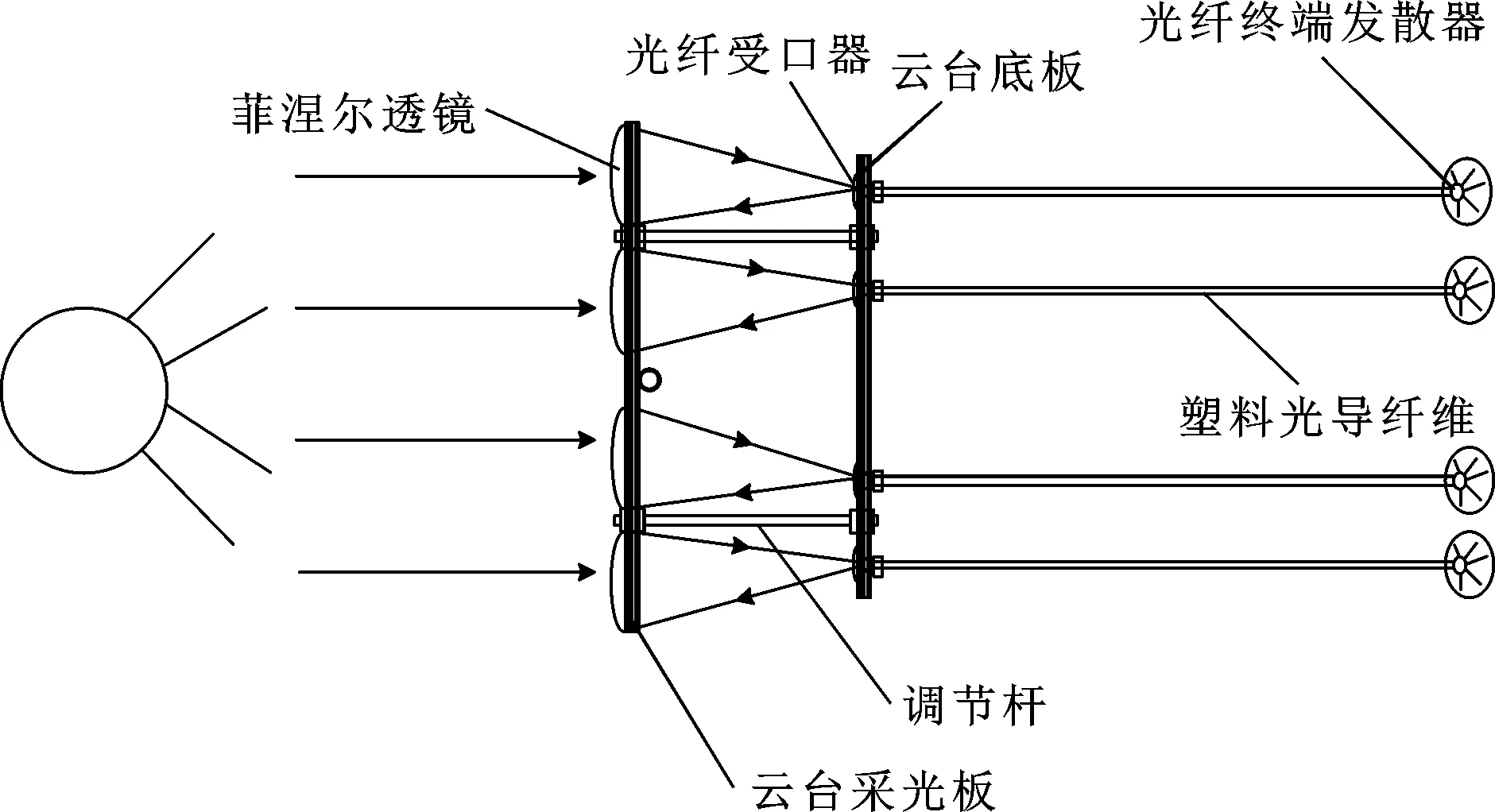
图3 光纤式太阳能聚光照明示意
2 太阳能聚光照明跟踪系统设计
2.1 新型二级粗细调阳光传感器模块设计
高精度光电跟踪模式以二级粗细调阳光传感器为核心,安装于追踪云台的采光板上。当阳光传感器和菲涅尔透镜的法线平行时,入射的阳光垂直照射采光板;反之,STM32驱动液压传动系统迅速追踪至最大光强处,从而提高太阳能利用率。创新设计了具有内外两组粗定位、细定位单元的二级定位阳光传感器,每组调节单元在东、南、西、北方向上均安装一个寻光感知元件光敏电阻,采光电路如图4所示。不同应用场合外界环境的太阳光照强度差异较大,为确保所选的8个光敏电阻~在野外恶劣工作环境中稳定可靠,特别给~均外接~可调电阻,用户可选择手工调节阳光传感器的输出值,从而使得光敏电阻一致性保持良好。其中,PA0~PA7为STM32的I/O控制端口,主控核心借助内嵌ADC模数转换模块将当前光照强度转换为十进制数值。

图4 新型阳光传感器追踪阳光电路
、、、光敏电阻组成外部粗调节单元(和为一组,接收南北方向太阳光;和为一组,接收东西方向太阳光),、、、光敏电阻组成内部细调节单元(和为一组,接收南北方向太阳光;和为一组,接收东西方向太阳光),具体安装如图5所示。
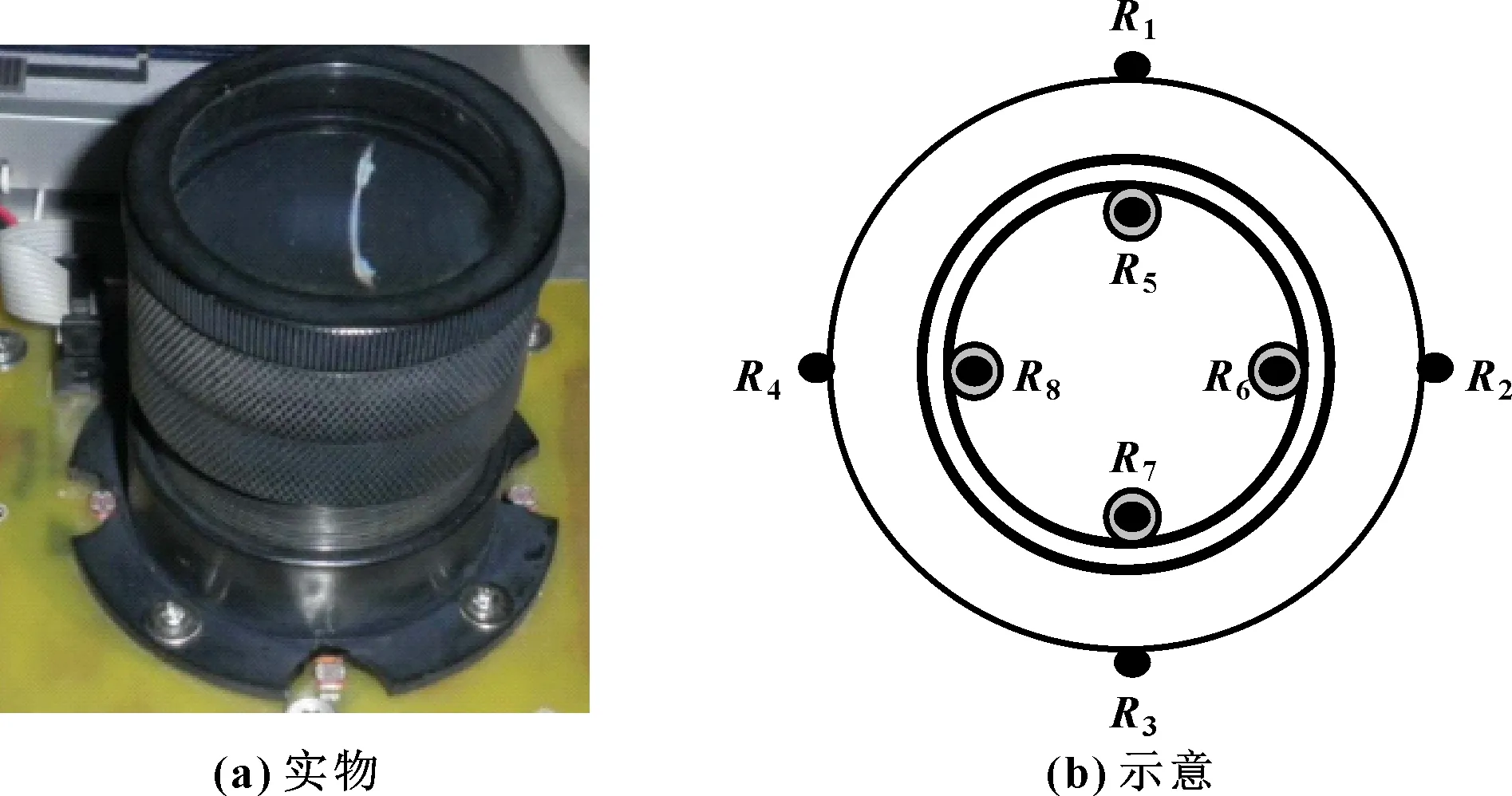
图5 新型阳光传感器安装
当主控核心STM32控制阳光传感器采光时,先对外部粗调节单元东、西方向的、两路信号进行采集、处理,处理完毕后,对粗调单元南、北方向的、两路信号进行采集和处理等工作,处理结束后,开始对内部细调单元的信号进行采集和处理;同理,优先进行东、西方向、的调节再进行南、北方向、的调节。当内部调节单元的4路信号处理完时,整个二级粗细调定位太阳光信号采集、处理过程结束。当阳光传感器背对太阳光线超过一定时间,STM32开启自寻找程序,解决了由于追踪云台被遮挡所导致的传感器无法正常工作的问题。
2.2 人机交互模块及串口通信模块设计
人机交互模块主要包括LCD12864液晶显示与独立按键模块S1~S6,如图6所示。根据调试需要,LCD12864上显示有自动调节或者人工调节的提示语,还显示应用场合的阳光强度AD值。当该系统自动跟踪工作时,屏幕中间位置东、南、西、北4个方向的数值与太阳传感器内部细调节单元、、、感受的太阳光线强弱相对应;最右侧处东、南、西、北4个方向的数值与太阳传感器外部粗调节单元、、、感受的太阳光线强弱相对应。设置独立按键模块S1~S6是为了方便用户对系统工作情况进行实时调节、监测,它与自动跟踪工作不冲突。考虑到后续跟踪系统的更新换代,配套了串口通信模块,确保与上位机通信流畅,同时通过通信模块能够实现对跟踪系统在特殊应用场合的监控和数字化管理。
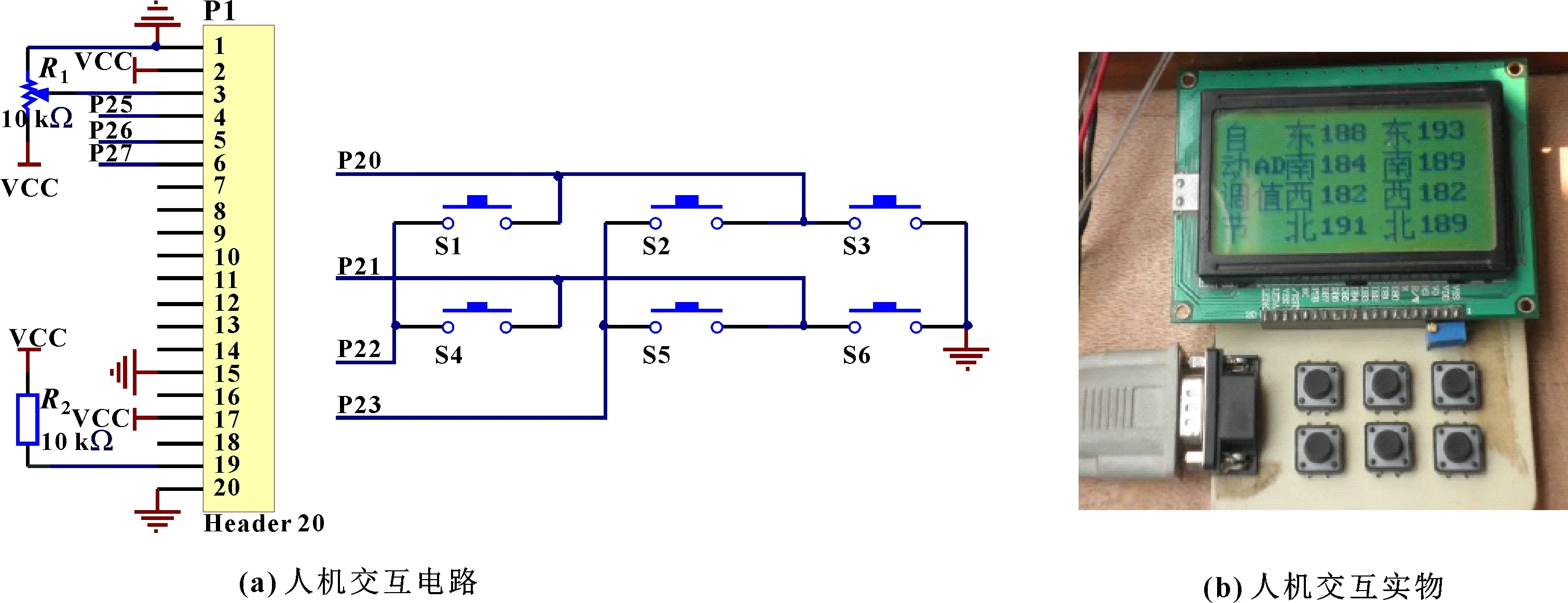
图6 人机交互模块电路及实物
3 太阳能聚光照明跟踪系统软件设计
太阳能聚光照明跟踪控制流程如图7所示,主控制器STM32单片机上电工作后,对系统控制性能参数以及系统时钟等模块进行初始化操作;获取多传感器所测量的外界环境风速、风向、温湿度、时间等信息,当处于白天且风速符合工作要求时,系统开始自动跟踪外界太阳光照;该系统首先对东西方向、进行粗调,判断东西相对方向的AD差值是否大于12(多次实验中得到的经菲涅尔透镜聚光后至受光处的光斑最亮直径最小而取的阈值),若大于该阈值则驱动方位角方向控制液压马达转动,使负载向东移动。调整好方位后,再读取外部南北方向、光敏电阻感光后对应的输出值,若南方AD值高于北方的值,且差值大于设定值12,高度角方向液压马达驱动聚光模块向南移位,反之向北移动,这样即可完成南北方向的一次调节;细调节单元、、、的调节过程与粗调节过程一致,将细调节的阈值设置为5;至此,实现了一次高精度自动跟踪外界光照目标。
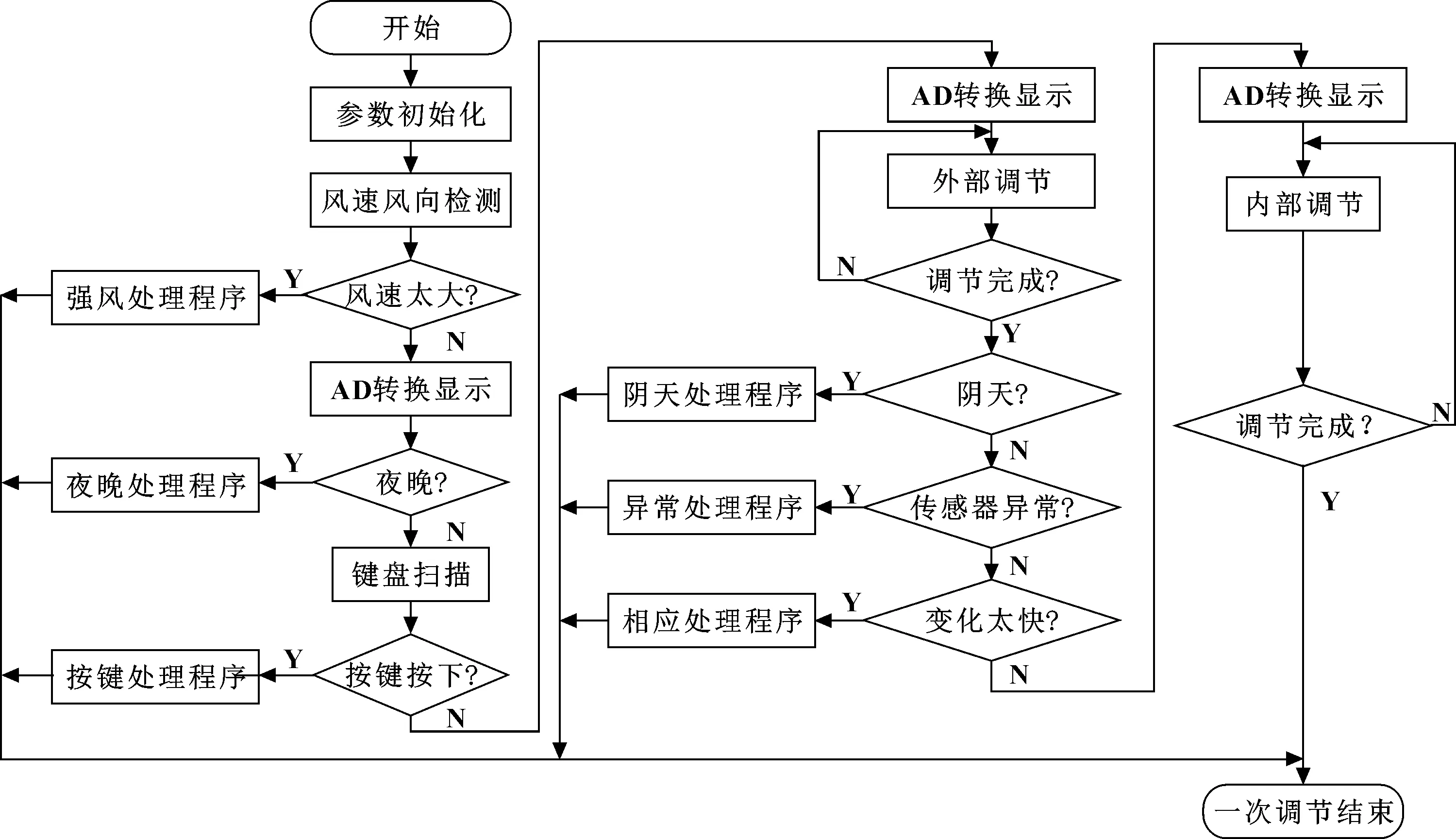
图7 太阳聚光照明跟踪控制流程
4 太阳能聚光照明跟踪系统性能测试
根据该系统设计要求和内部组成模块,搭建太阳方位角和高度角性能参数实验的测试平台。菲涅尔聚光模块中透镜的规格:每个透镜半径=5 cm、焦距=1.5 cm。折射率为1.49的PMMA塑料光导纤维纤芯直径为2 mm,需通过调节杆确保实验中聚焦区域半径为2 mm。由于太阳方位存在时变性、太阳能能量分散,若系统跟踪误差较大,则经直径为100 mm的菲涅尔透镜会将阳光聚成2 mm高亮光斑在光纤圆孔中心,会发生闪烁不定的现象。所设计的新型光纤式太阳能聚光照明跟踪系统实物和照明效果测试如图8所示,实验中光纤终端一直是一个高亮光斑,可证明该系统跟踪精度高。
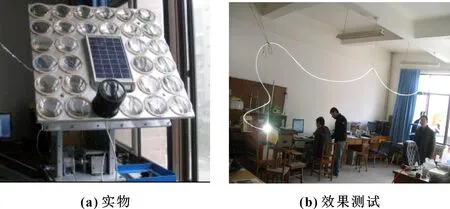
图8 太阳聚光照明跟踪实物和照明效果测试
同时,为定性分析太阳能聚光照明跟踪系统效果,把追踪云台和=60 cm的标尺装配在一起,若直尺的投影长度=0,说明该时刻太阳正垂直照射于追踪云台(跟踪误差=0)。直尺投影定律的表达式为

(1)
以2020年8月上旬西安作为测试地点,通过直尺投影原理检验使用文中所设计的二级定位粗细调阳光传感器后该跟踪系统的跟踪效果,实验误差如表1所示。结果表明该系统跟踪精度高,误差角度小于0.1°。
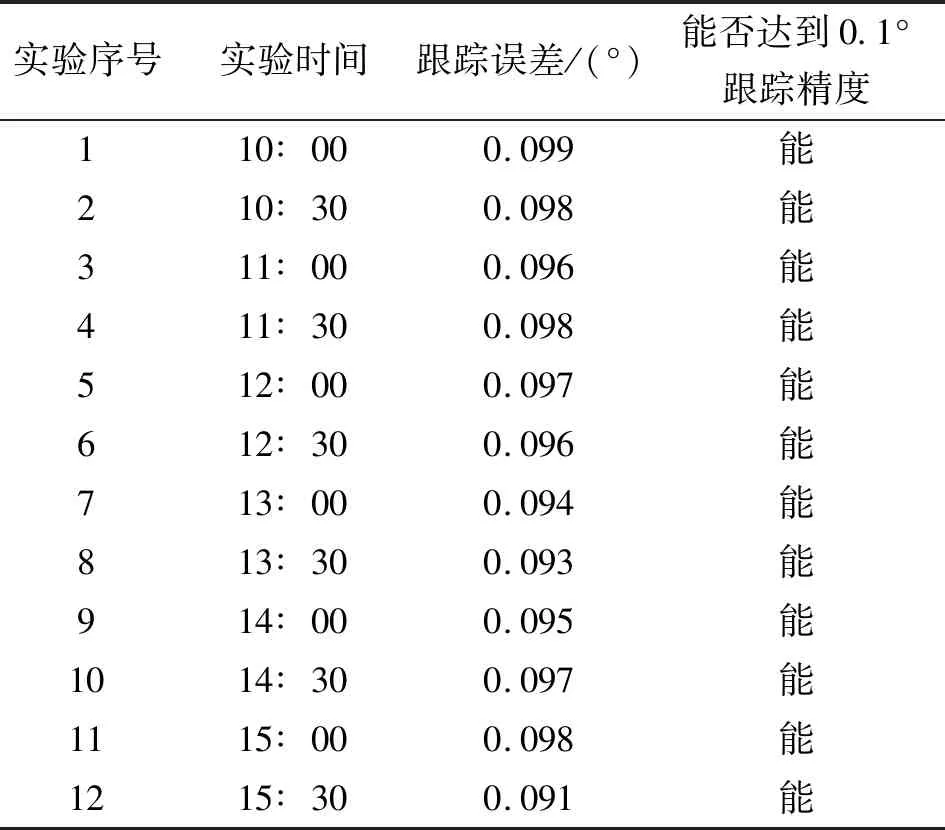
表1 实验误差
5 结论
太阳能聚光照明自动跟踪系统已是全球研究热点,其关键在于高倍聚光和自动跟踪。本文作者基于液压传动和新型粗细调二级定位阳光传感器设计并实现了一种具有高测量精度、低成本优点的太阳能聚光照明跟踪系统,提高了太阳能利用率。该系统可以广泛应用于太阳能聚光照明、聚光发电场合,具有一定的现实意义与推广价值。
