矿用高频隔离型变频调速无速度传感器矢量控制
2022-09-16刘文壮刘建功王毅颖伯磊郝育红
刘文壮, 刘建功, 王毅颖, 伯磊, 郝育红
(1. 河北工程大学 机械与装备工程学院,河北 邯郸 056038;2. 河北省煤炭生态保护开采产业技术研究院,河北 邯郸 056038;3. 中国矿业大学(北京) 机电与信息工程学院,北京 100083;4. 冀中能源峰峰集团有限公司,河北 邯郸 056107)
0 引言
通常,变频器采用桥式整流从电网向直流链路提供电力,直流链路采用电解大电容,逆变级采用功率开关管全桥[1-2]。在煤矿中、高压及有限场合,变频器接入电网时需采用工频变压器进行变压[3],但传统的工频变压器存在电压调节差、体积大等缺点,且大多被控电动机采用开环控制,因此研究一种高频隔离型变频器对于提高电压调节、节约成本、提高电动机控制精度具有重要意义。
近年来,许多学者针对整流、高频隔离DC-DC和逆变三级型的高频隔离型变频器拓扑结构进行了研究。文献[4]基于三级型拓扑结构,提出了一种改进新型结构整流-逆变级双星型交错连接及多绕组共铁芯变压器新型结构方式,实现了系统整流-逆变级的隔离,电动机控制采用恒压频比开环控制方法。文献[5]提出了一种三相三级型异步电动机变频调速拓扑结构,三相逆变级采用了一种120°坐标系网络空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)开环控制策略,降低了控制结构复杂性。以上开环控制系统并没有对电动机转速进行测量,在控制电动机时存在控制精度低、动态性能不理想等缺点。矢量控制[6]具有启动转矩大、动态性能好和精度高等优点,能解决上述开环控制存在的问题。文献[7]基于级联式三级型结构,提出了一种牵引电动机矢量控制方法,脉宽调制采用同步优化脉宽调制,磁链观测器采用电压电流混合磁链观测模型,采用速度传感器测量速度,构成速度闭环控制。但速度传感器需定期校准与维护,成本较高,不适用于煤矿环境。无速度传感器控制能使电动机在运动过程中很好地跟踪目标转速,因此在煤矿复杂应用场景下,采用无速度传感器控制方法是很好的选择。
目前对于矿用高频隔离型变频器的研究大都集中在级联式三级型结构,对于结构简单的三相三级型结构和电动机控制策略研究较少。为增大工作空间、降低拓扑结构复杂性、提高电动机的控制精度,本文提出了一种基于高频隔离型变频调速拓扑结构的无速度传感器矢量控制策略。首先,对矿用高频隔离型变频调速主电路拓扑结构及功率传输进行分析。然后,给出了主电路控制策略。最后,通过实验验证了本文所提控制策略的有效性和可行性。
1 矿用高频隔离型变频调速主电路拓扑
矿用高频隔离型变频调速主电路拓扑结构主要由三相整流级、高频隔离DC-DC级、三相逆变级组成,如图1所示。为减少电网谐波,在三相整流级前加电抗器。三相整流级由二极管(D1-D6)全桥组成。高频隔离DC-DC级由单相逆变IGBT(S1-S4)全桥、辅助电感L、高频变压器(变比为n:1)、单相整流二极管(D7-D10)全桥和两侧稳压电容C1、C2组成,能高效率实现电压等级变换和稳定输出,且能够实现高频隔离DC-DC级原、副边直流母线间的电气隔离,可解决在煤矿中、高压及有限场合变频器采用工频变压器进行变压存在的电压调节差、占用工作空间大等问题。三相逆变级由IGBT(S9-S14)全桥组成。在异步电动机和三相逆变级间接入LC滤波器。
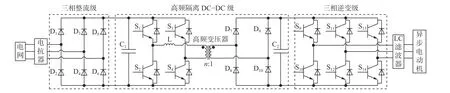
图 1 矿用高频隔离型变频调速主电路拓扑结构Fig. 1 Topology structure of main circuit of mine high frequency isolated variable frequency speed regulation
矿用高频隔离型变频调速主电路通过不可控整流环节将输入的三相工频交流电源整流为直流电源,将脉动直流电源(经整流的直流电源为脉动直流电源)进行平滑滤波处理,得到稳定的直流电源,经高频隔离DC-DC级进行变压,然后经三相逆变环节将直流电源逆变为电压和频率均可调的交流电源[8]。
2 控制策略分析
2.1 三相整流和高频隔离DC-DC级控制策略
为减少IGBT开关损耗、节约整体成本并降低整体结构复杂性,三相整流级采用二极管不控整流策略。高频隔离DC-DC级采用等脉宽调制策略(Equal Pulse-Width Modulation,EPWM),使高频隔离DC-DC级原边相同桥臂上下两开关管的驱动脉冲信号成180°互补,桥对角开关为相同驱动脉冲,为防止同一桥臂上的2个开关管同时导通的情况发生,需要在这2个功率开关管的驱动信号之间留有死区时间。最终将三相不控整流得到的直流电压Udc1调制成占空比为50%,频率为20 kHz的高频方波电压Uh1,将高频方波电压Uh1耦合到变压器二次侧高频方波电压Uh2,这种开环控制方式具有结构简单、可靠性好等优点。高频隔离DC-DC级工作状态原理如图2所示,其中t为时间,Ts为调制周期。高频隔离DC-DC级控制如图3所示。
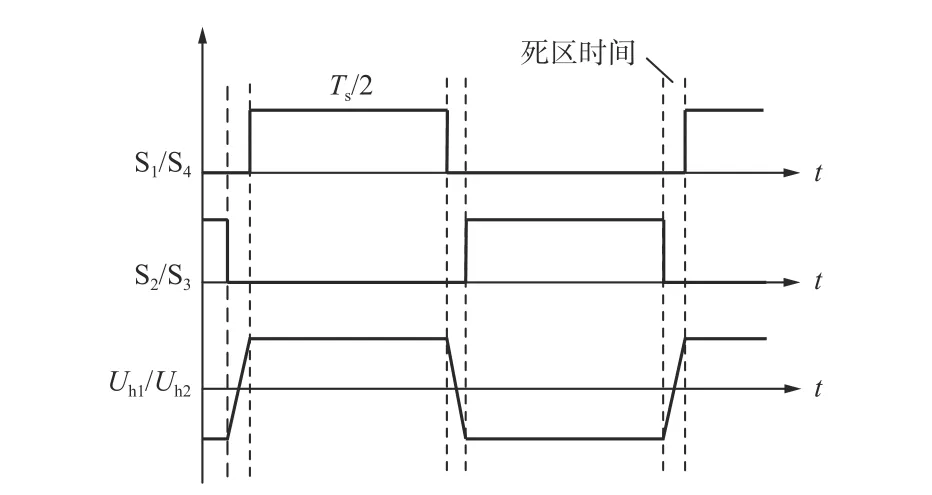
图 2 高频隔离DC-DC级工作状态原理Fig. 2 Working state principle of high frequency isolated DC-DC stage
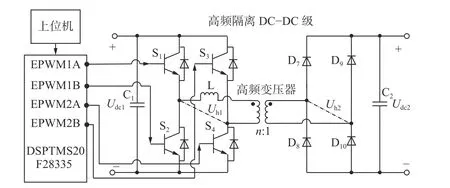
图 3 高频隔离DC-DC级控制Fig. 3 High-frequency isolated DC-DC stage control
2.2 三相逆变级控制策略
三相逆变级采用无速度传感器矢量控制策略,在此控制策略中采用模型自适应系统(Model Reference Adaptive System, MRAS)进行速度估测。MRAS转速估算模型得到的电动机转速与实际电动机转速误差较小,具有良好的转速估算性能,MRAS包含参考模型、可调模型和自适应机构3个部分,其基本结构如图4所示[9]。在受到外部输入激励时,利用参考模型和可调模型的输出量x与的误差δ构成合适的自适应机构,实时调节可调模型的参数,达到跟踪参考模型的目的。

图 4 MRAS基本结构Fig. 4 Basic structure of MRAS
将MRAS速度估测方法作为感应电压矢量估计法[10]。其中,电动机在三相静止ABC轴系的定子、转子电压矢量方程为
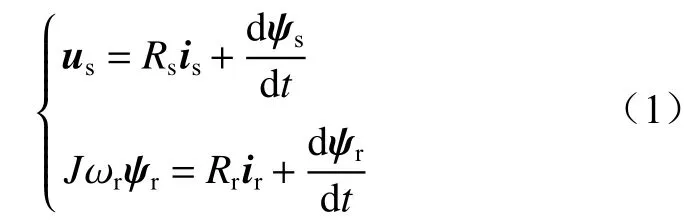
式中:us为定子电压矢量;Rs为定子电阻;is为定子电流矢量;ψs为定子磁链矢量;t为时间;J为电动机转动惯量;ωr为 电动机转子转速(电角速度);ψr为转子磁链矢量;Rr为转子电阻;ir为转子电流矢量。
定子、转子磁链方程为

式中:Ls为等效定子自感;Lm为绕组互感;Lr为等效转子自感。
定子和转子在d、q坐标系下的磁链方程为
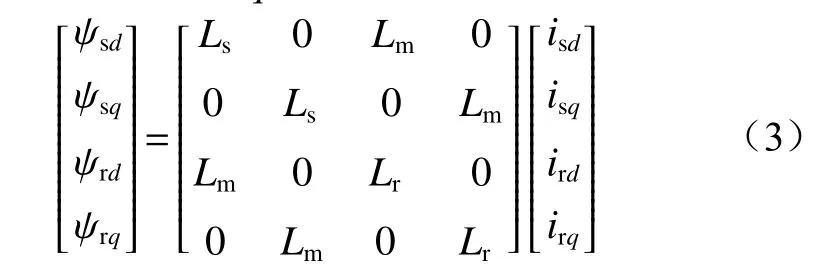
式中: ψsd,ψsq分别为定子磁链在d、q坐标系下的分量;ψrd,ψrq分别为转子磁链在d、q坐标系下的分量,ψr=ψrd+Jψrq;isd,isq分别为定子电流在d、q坐标系下的分量,is=isd+Jisq;ird,irq分别为转子电流在d、q坐标系下的分量,ir=ird+Jirq。
消去式(2)中转子电流矢量ir,可得定子磁链方程。

将式(4)代入式(1),可得

如将式(5)作为参考模型,定子电阻具有热敏性,则会给参考模型带来误差[11]。定义Y为电压和电流矢量的叉乘模,则

将Y作为参考模型,从式(6)中可看出参考模型中不含有积分环节,能够有效避免积分初始误差。
根据式(1)和式(2),消去转子电流矢量,代入式(5)可得


磁场进行定向后 ψrd=ψr,ψrq=0。则
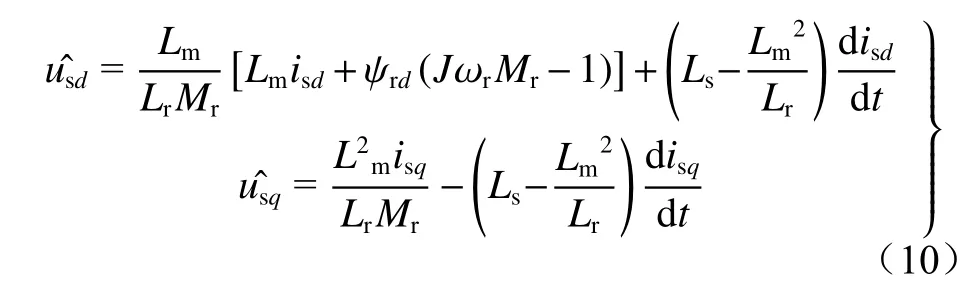

式中:kP,kI分别为比例、积分系数;p为电动机极对数。
根据无速度传感器矢量控制原理和上述建立的MRAS速度估计模型,可建立异步电动机无速度传感器矢量控制图(图5)。将采集的定子电流经Park变换得到的励磁电流id、转矩电流iq构成控制内环,将id,iq与三相电压输入至MRAS估计模块,再将估算得到的转子转速观测值与转子转速参考值进行比较,构成转速外环控制,实现电动机转速闭环控制。比较值经电流调节器ASR得到电流参考值,通过弱磁控制得到的电流参考值,将与进行转速差ωsl计 算,转子转速观测值和 转速差ωsl计算出两相静止坐标系与两相旋转坐标系的角度θ 。将分别与id,iq比较后,进行反Park变换并输入电压调节器ACR,通过SVPWM算法控制逆变器功率开关管。电流内环调节器根据文献[12]中介绍的方法进行参数整定,通过弱磁控制使得等效转子磁场小于原转子永磁体磁场,能更好地提升电动机速度。

图 5 异步电动机无速度传感器矢量控制Fig. 5 Speed sensorless vector control of asynchronous motor
3 实验验证
为验证矿用高频隔离型变频调速无速度传感器矢量控制策略的正确性,采用0.75 kW的三相异步电动机作为被测电动机进行实验验证。根据矿用高频隔离型变频调速主电路拓扑结构,搭建实验平台,平台主要包括三相不控整流级、高频隔离DC-DC级原边、高频变压器、LC滤波器、高频隔离DC-DC级副边、三相逆变级和三相异步电动机,如图6所示,其中,C1,C2分别为DC-DC变换器原边、副边稳压电容。高频隔离DC-DC级和三相逆变级电动机控制电路分别利用一块 DSPTMS20F28335 控制板控制IGBT开关。三相异步电动机和矿用高频隔离型变频器的参数见表1和表2。

图 6 矿用高频隔离型变频器电动机控制实验平台Fig. 6 Experimental platform for motor control of high frequency isolated mine frequency converter
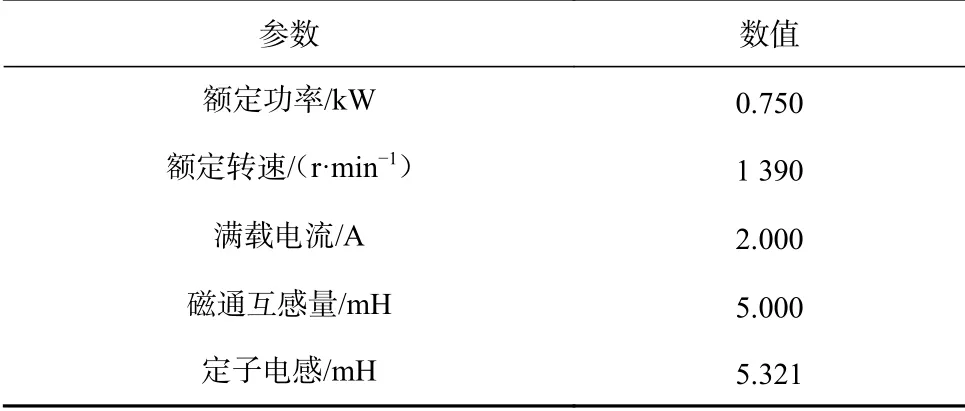
表 1 三相异步电动机参数Table 1 Parameters of three-phase asynchronous motor
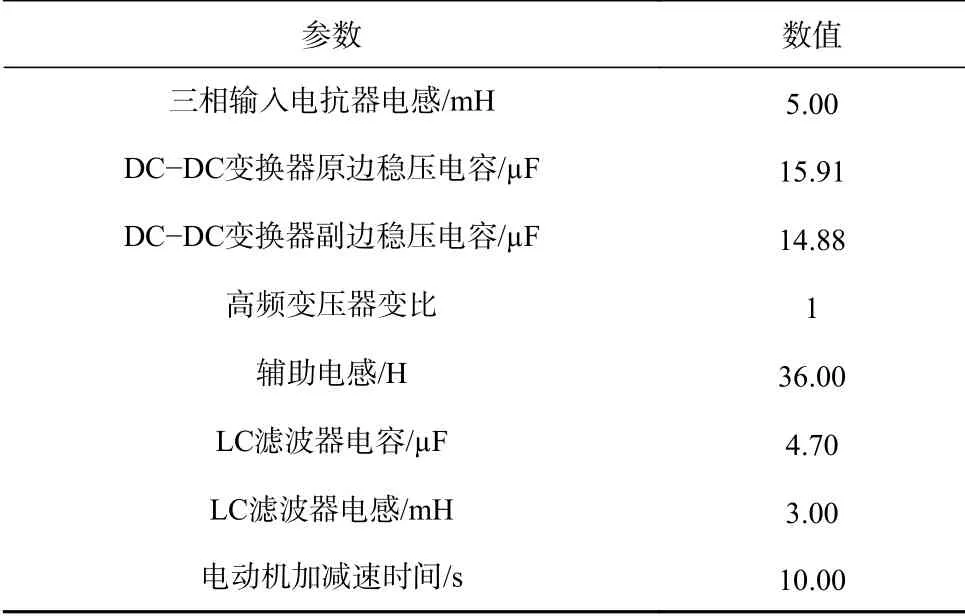
表 2 矿用高频隔离型变频器参数Table 2 Mine frequency converter parameters of high frequency isolation type
3.1 高频隔离DC-DC级验证
将线电压为380 V、频率为50 Hz的三相正弦交流电供给三相不控整流级,用示波器测试高频隔离型变频器各级输出,并导入Origin绘制。输入电压经整流后直流电压谷值为330×1.4=462 V,峰值为380×1.4=532 V,高频隔离DC-DC级原、副边直流电压平均值Udc1与Udc2分别为510,505 V(图7(a)),因高频变压器功率传输问题,Udc2略小于Udc1。Udc1经高频DC-DC变换级原边单相逆变后得到高频方波电压Uh1,Uh1经高频变压器 1:1 耦合得到高频方波电压Uh2,Uh1,Uh2平均值均为533 V,频率为20 kHz(图7(b))。可看出高频隔离DC-DC级两侧直流母线电压波动小于10 V且高频方波电压相等,原边单相逆变方波Uh1和高频变压器耦合方波电压Uh2波形平滑,整体稳态性能好。
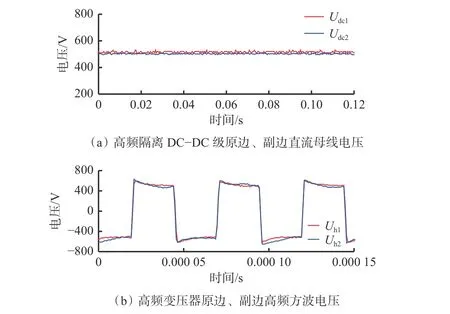
图 7 高频隔离DC-DC级实验波形Fig. 7 High-frequency isolated DC-DC experimental waveform
3.2 三相逆变级验证
高频隔离型变频器三相逆变级实验波形如图8所示。因不能动态调频,选择3组相电流波形。可看出在一个调制周期Te(e=1, 2, 3)内,当电流频率为40,50和60 Hz时,电流最大值约为0.17 A,当频率为电动机额定频率50 Hz时,线电压Uab、Ubc、Uca的有效值均为Uo=Udc2/1.414≈355 V 。电压、电流波形正弦度良好,波形对称且光滑度较好,三相逆变级稳定性能好,满足电动机运行要求。
为观察电动机控制效果,进行电动机绕组电流调制实验,将采集的定子电流进行Park变换后,得到d-q坐标下的励磁电流id和转矩电流iq,如图9所示。在轻载模式下,为方便观察,将电动机加减速时间设置为10 s,可看出随时间增加励磁电流id变化较稳定,转矩电流iq在启动时响应迅速,且启动阶段转矩电流iq较大,能产生较大的转矩。
电动机转速和转矩实验波形如图10所示。由图10(a)可看出,电动机速度稳定阶段速度波动小,加、减速阶段波形趋于一次函数,电动机能够平稳启停。由图10(b)可看出,电动机在刚启动时最大转矩可达到稳定转矩的5倍以上,能够较快启动,进行工作。说明电动机性能良好、响应速度快和具有较大的启动转矩。

图 8 三相逆变级实验波形Fig. 8 Experimental waveform of three-phase inverter stage

图 9 电流id和iq响应曲线Fig. 9 Current id and iq response curves

图 10 电动机转速和转矩实验结果Fig. 10 Results of motor speed and torque experiments
综上可知,高频隔离型变频器稳定性和电动机的静、动态性能较好,证明了高频隔离型变频调速无速度传感器矢量控制策略的有效性和可行性。
4 结论
(1) 高频隔离DC-DC级两侧直流母线电压波动小于10 V且高频方波电压相等,原边单相逆变方波和高频变压器耦合方波电压波形平滑,整体稳态性能好。
(2) 三相逆变级电压、电流波形正弦度良好,波形对称且光滑度较好,三相逆变级稳定性能好,满足电动机运行要求。
(3) 随时间增加励磁电流变化较稳定,转矩电流在启动时响应迅速,且启动阶段转矩电流较大,能产生较大的转矩。
(4) 电动机速度稳定阶段速度波动小,加、减速阶段波形趋于一次函数,电动机能够平稳启停。电动机在刚启动时最大转矩可达到稳定转矩的5倍以上,能够较快启动进行工作。
